
Abstract
One of the primary geotechnical problems encountered during tunnel construction involves the inflow of groundwater into the tunnel. Heavy inflows make tunnel construction difficult and result in higher costs and delays in construction period. Therefore, it is essential to estimate the volume and rate of water inflow that is likely to appear in the tunnel. In this research, water inflow to the tunnel was calculated using numerical hydromechanical analysis. Effect of rock mass properties including fracture characteristics (normal and shear stiffness, hydraulic aperture, dilation angle, and fracture nonlinear behavior) on inflow was studied using a two-dimensional distinct element method. Results show that fracture properties play important role in inflow to the tunnel and must be considered in prediction of inflow to the tunnel. Based on numerical analysis results, inflow of groundwater into the tunnel increases with the increasing of normal and shear stiffness, dilation angle, and hydraulic aperture of rock mass fractures. The measured inflow with considering nonlinear fracture behavior was more than the calculated inflow with linear constitutive behavior.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
In a fracture, fluid flow takes place in the space between two adjacent rock surfaces that are irregularly shaped with each other. When we excavate an underground opening in a rock mass, the in situ stress field in the rock mass changes. Stress perturbation in rock masses leads to new stress redistribution and concentration of compressive, tensile, and shear stresses. Due to the stress redistribution around underground excavations, new fractures may occur, or existing fractures would deform, which cause significant changes in rock mass behavior.
Rock mass is a matrix consisting of rock material, in the form of intact rock, and rock discontinuities (fractures). Although intact rock may have microstructures such as microcrack voids and so on, its permeability could be neglected compared to rock fractures, in which the fracture’s permeability is several times more than the intact rock’s permeability. Therefore, in rock mass, mechanical and hydraulic behavior is governed by the characteristics of the fractures. In stiff rock masses, most deformations in the form of normal and shear strains occur in the discontinuities, which include plenty of complexities in rock matrix. These deformations also change the void geometry, the joint aperture, and fluid flow (hydraulic conductivity; Sharifzadeh et al. 2005). However, accurate prediction of the water inflow during tunnel construction is difficult, and its estimation is essential. Prior knowledge on groundwater inflows makes it possible to prevent any sever damage during tunnel construction by suitable counter measures.
A large number of researches have been devoted to the problem during the past decades. Goodman et al. (1965), Freeze and Cherry (1979), Lei (1999), and Heuer (1995) used analytical and experimental methods for prediction of inflow to the tunnels (Goodman et al. 1965; Lei 1999; Heuer 1995). Considering the equivalent permeability and ignorance of fractures and discontinuities explicitly in rock mass, these methods could not give accurate results. It is well known that the presence of fractures in rock mass affects the stability and construction conditions of underground structures. Rock mass behavior is largely governed by discontinuities which provides water flow channel, creates flow networks, and acts as weak planes for sliding and moving. Coupled hydromechanical processes in fractures could affect the fluid flow in rock mass. Thus, fractures and hydromechanical processes must be considered in prediction of inflow to the tunnel.
Simultaneous variation of hydraulic and mechanical properties is called hydromechanical coupling analysis. In the early 1960s, the coupling between hydraulic and mechanical processes in fractured rock started to receive wide attention. During the last 20 years, most of the research and development on hydromechanical coupling in fractured rocks and most applications of hydromechanical coupled analysis have been conducted as part of oil and gas exploration, hot-dry rock geothermal energy and fluid flow investigations, and studies for nuclear waste disposal (Rutqvist and Stephansson 2003).
In this study, a coupled hydromechanical numerical analysis was conducted to find a better understanding of the influence of fracture properties on inflow to the tunnel. For this reason, a two-dimensional distinct element method was selected. In the following sections, first, it is presented an introduction to the fluid flow modeling in distinct element method. Then, the process for the model setup has been explained. Finally, the effect of normal and shear stiffness, hydraulic aperture, dilation angle, and nonlinear fracture behavior on inflow to the tunnel were studied.
Numerical analysis of inflow to the tunnel
Numerical modeling of fluid flow, contaminant transport, and geochemical reactions in fractured rock has attracted the attention of many scientists for more than 40 years. Among numerical methods for fluid flow analysis are finite element method, finite difference method, and distinct element method. Many finite element and finite difference programs have interface elements or “slide lines” that enable them to model a discontinuous material to some extent. However, their formulation is usually restricted in one or more of the following ways; firstly, the logic may break down when many intersecting interfaces are used; secondly, there may not be an automatic scheme for recognizing new contacts; and finally, the formulation may be limited to small displacements and/or rotations. Such programs are usually adapted from existing continuum programs (Itasca 2004). Thus, in this study, the universal distinct element code (UDEC version 3.1) was used for discontinuous modeling.
In this program, the discontinuous media are represented as an assemblage of discrete blocks, and discontinuities are treated as boundary conditions between blocks. Individual blocks are impermeable, and fluid only flows through fractures (Itasca 2004). In the following section, the fluid flow modeling in distinct element method is explained.
Fluid flow modeling in distinct element method
The distinct element code has the capability to perform the analysis of fluid flow through the fractures of a system of impermeable blocks. A fully coupled hydromechanical analysis could be performed in which fracture conductivity depends on mechanical deformation and, conversely, fracture water pressure affects the mechanical behavior.
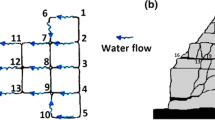
To calculate water flow in distinct element method, fracture is modeled as parallel plate without considering surface roughness. Flow is governed by the pressure difference between adjacent domains such as 1, 2, 3, and 4 illustrated in Fig. 1. The flow rate from one domain with defined pressure P 1 to another domain with pressure P 2 is given by:
where k j is joint permeability factor (define as 1/12 μ), μ is the dynamic viscosity of the fluid, e h is the hydraulic aperture, and L is the length assigned to the contact between the domains that is defined as half of the distance to the nearest contact to the left plus half the distance to the nearest contact to the right similar to l D and l E in Fig. 1.

Schematic view of flow in joints modeled as flow between domains (Karegar 2007)
Model geometry
For prediction of inflow to the tunnel and studying the influence of fracture properties on inflow, a two-dimensional distinct element model was constructed. The model geometry consists of a rock mass domain with 70 m (length) and 70 m (height) with two joint sets at 1,000 m depth. A circular tunnel with 10 m diameter was embedded in the center of the model as illustrated in Fig. 2. The groundwater level was assumed 200 m above the block.

Model geometry and boundary conditions
Rock mass properties and constitutive behavior
The rock mass consists of intact rock and two sets of fractures. The intact rock was modeled as an isotropic, homogeneous, and linearly elastic material with density of 2,700 kg/m3, Young's modulus of 40 GPa, and Poisson's ratio of 0.22. These values are assumed to be representative of the hard rock mass, which could be compared with the Äspö HRL (Chryssanthakis 2003). An elasto-perfectly plastic Mohr–Coulomb model was chosen for the fracture behavior. Table 1 shows the fracture properties used in simulations.
Initial and boundary conditions
The block was placed at 1,000 m depth; thus, boundary stress according to overburden height (1,000 m) and rock mass density (2,700 kg/m3) was applied to upper surface of block. The model has roller boundaries at three directions. Pore water pressures were set in all boundaries and bulk model according to underground water level. The initial stress field was set at origin of model according to the model depth (1,070 m) and equal in x and y directions (with k = 1). In Fig. 2, the model geometry and boundary conditions are shown.
Calculation procedure
To simulate natural condition in computer code, at first, mechanical conditions including in situ stress and pore water pressure were applied to the model, and it was run to obtain equilibrium state. In other words, mechanical calculation was performed to get equilibrium in model which simulates ground condition before excavation. In the second step, the tunnel was excavated (removed from the model), and mechanical calculation was continued to reach equilibrium again. Stress redistributions were obtained at this stage. Finally, coupled hydro-mechanical calculation was performed to obtain tunnel inflow. To do this, atmospheric pore water pressure at the boundaries of excavation was applied until reaching steady-state inflow (Karegar 2007; Mas Ivars 2006).
To calculate total inflow to the tunnel, a FISH function (a subprogram in UDEC software) was developed. This function finds contacts that intersect the tunnel. These points were used as history points of flow rate in the last step of calculation (Fig. 3). After equilibrium state in the last step, flow rates of all history points were added to determine the total inflow to the tunnel.

Flow history points in model
Assessment of fracture properties on inflow to the tunnel
It is well known that the fractures are main path for fluid flow; thus, their properties have significant effect on inflow to the tunnel. Therefore, the effect of normal and shear stiffness, hydraulic aperture, dilation angle, and nonlinear behavior of fractures on inflow to the tunnel were investigated.
Normal and shear stiffness
Fracture stiffness represents fracture deformability against normal and shear loading. Each fracture has two stiffness: normal stiffness and shear stiffness. Normal and shear stiffness are important properties of fractures that govern fracture geometry under normal and shear loading (Zhang and Sanderson 2002).
The effect of stiffness on inflow was studied with three pairs of normal and shear stiffness (k n, k s) consisting (20, 12), (61.5, 35.5), and (360, 210), with four friction angles of 25°, 30°, 35°, and 40°. Results of numerical analysis are illustrated in Fig. 4. It can be seen that inflow to the tunnel increases with increasing normal and shear stiffness. Fractures with high normal stiffness will not close easily under normal loading, which means that apertures and flow paths will remain open even under high normal loading. In mismatched fractures, closing of the joint is more difficult. Therefore, it could be concluded that less stiff fractures close more easily than stiffer ones. In fractures with high shear stiffness, asperities will not break easily with shearing, and large dilation is expected; thus, aperture and hydraulic conductivity increase. In contrary, in fractures with low stiffness, asperities slide easily with low dilation. Consequently, aperture size and hydraulic conductivity decrease compared to stiff ones.

Measured inflow vs. normal and shear stiffness
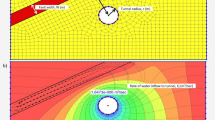
In Fig. 5, aperture distribution around the tunnel is shown for different stiffness. This figure shows that, despite the fact that several fractures cross the tunnel surrounding rock masses, fluid flow only occurs through special flow paths. The fractures with considerable aperture size and connection to each other play an important role in hydraulic conductivity and form main flow paths in rock masses (Sharifzadeh and Karegar 2006; Sharifzadeh and Karegar 2007).

Fracture aperture contours around the tunnel for different stiffnesses
Hydraulic aperture
The fracture aperture is defined with hydraulic and mechanical aperture. Because of roughness and contact areas, hydraulic aperture is smaller than mechanical aperture. Hydraulic and mechanical apertures change with applied stress level. Aperture changes could affect the hydraulic conductivity of fracture in hydromechanical analysis.
In almost all applications, fluid flow through a fracture is assumed analogous to laminar flow between two perfectly smooth parallel plates. This leads to the so-called cubic law where the volume flow rate varies as the cube of separation between the plates or aperture size. The parallel plate model can be considered only a qualitative description of flow through ideal fractures. Real fracture surfaces are not smooth and parallel plates, but are rough and contact each other at discrete points. Fluid is expected to take a tortuous path when moving through a real fracture; thus, deviations from the cubic law are expected (Cook 1992), and therefore, it should be used carefully. The distinct element method uses cubic law for flow calculation through fractures. To study the effect of aperture on inflow, simulations were made with ±20% initial hydraulic aperture. These simulations were run with normal stiffness of 61.5 GPa/m, shear stiffness of 35.5 GPa/m, and friction angle of 30°. The model geometry, boundary, and in situ conditions were the same as that presented in previous section. Results are presented in Fig. 6, where the inflow shows to be very sensitive to aperture and increases with the increase of aperture.

Measured inflow vs. initial hydraulic aperture
Dilation angle
In distinct element method, fracture is modeled using parallel and smooth plates. Thus, fracture’s asperity and roughness are ignored. The dilation angle used in modeling is considered as asperity angle, and has the main role in shear process and shear displacement. To study the effect of dilation angle on inflow to the tunnel, models were run with dilation angles of 2°, 3°, 6°, 9°, and 12°. Results illustrated in Fig. 7 reveal that inflow increases with increasing dilation angle. With increasing asperity angle, strength against shear increases, and asperity does not break easily; thus, shear dilation and aperture increase and lead to the increase of inflow.

Measured inflow vs. dilation angle
Fracture nonlinear behavior
When an underground opening is excavated, the effective stresses in the vicinity of the opening are redistributed taking the fractures close to the opening through rather complex load paths. The change in effective normal stress and the shear dilation modify the fracture aperture and transmissivity with the consequent effect on the inflow to the excavation. Fracture reaction to stress changes is determined by fracture constitutive behavior.
In previous sections, the elasto-plastic Mohr–Coulomb slip model was adopted. This model captures essentially the fracture behavior over a specified limited range of effective normal stress over which the fracture parameters can be assumed constant. However, it has been observed experimentally that the normal fracture stiffness is dependent on the effective normal stress acting on the fracture, and the fracture friction and dilation decrease with plastic shear displacement due to shearing damage.
For studying the effect of fracture nonlinear behavior on inflow, the continuously yielding joint model (CY) was compared with Mohr–Coulomb slip model. The continuously yielding joint model, proposed by Cundall and Hart, is an empirical fracture model intended to simulate the progressive erosion of asperities and reduction in dilation observed in fracture shear displacement. Additionally, it accounts for the normal and shear stiffness dependency on normal stress. In this model, normal and shear stiffness are explained as follows (Itasca 2004):
where k n and k s are normal and shear stiffness, respectively, and e n and e s are model parameters. This section presents a numerical study for comparison between the inflow to the tunnel with a Mohr–Coulomb (MC) fracture constitutive model and the inflow measured with the nonlinear continuously yielding (CY) joint model. The fracture datasets used in the simulation were chosen according to published data available from Äspö area (Stille and Olsson 1989; Chryssanthakis 2003). These data, which are presented in Table 2, are fracture models with high and low stiffness. The results are illustrated in Fig. 8. According to this figure, measured inflow using CY model for low and high stiffnesses is greater than the calculated inflow from MC model (for low stiffness cases, the inflow to the tunnel in CY models is about three times greater than MC models). The origin of this large difference is that in CY models, fracture stiffness depends on normal stress. On the other hand, after excavation, increasing normal stress results in larger normal and shear stiffness which, in turn, leads to greater aperture and inflow.

Measured inflow with MC and CY fracture models
Conclusions
Water inflow to the rock tunnel is a complex problem influenced by a number of factors such as rock mass properties, coupling processes, tunnel geometry, etc. In this work, we presented a numerical study with the aim of analyzing the effect of rock mass properties on inflow to the tunnel. Matrix flow, two-phase flow, temperature effects, and fracture initiation and propagation are not considered in this study.
The rock mass includes intact rock and fractures. The fractures are main path for fluid flow; thus, their properties are important in prediction of inflow to the tunnel. The effect of fracture’s normal and shear stiffness, hydraulic aperture, dilation angle, and nonlinear behavior were investigated in this study. Results show that inflow increases with increasing normal and shear stiffness, hydraulic aperture, and dilation angle. Also, the inflow to the tunnel can be largely underestimated when a linear fracture deformation model is used. This is especially relevant for cases with low stiffness. The inflow calculated for the continuously yielding joint model is shown to be three times greater than the inflow obtained from Mohr–Coulomb slip model.
References
Chryssanthakis P (2003) Oskarsham site investigation. Borehole:KSH01A. Results of tilt testing, SKB, P-03-107. Swedish Nuclear Fuel and Waste Management Co. (SKB)
Cook NGW (1992) Natural joints in rock: mechanical, hydraulic and seismic behaviour and properties under normal stress. Int J Rock Mech Min Sci Geomech Abstr 29(3):198–223
Freeze R. A. and Cherry J. A., (1979). Groundwater Prentice Hall, Inc., Englewood Cliffs, New Jersey.
Goodman RE, Moye A, Schalwyk V, Javendel I (1965) Groundwater inflow during tunnel driving. Eng Geol 2:39–56
Heuer RE (1995) Estimating rock tunnel water inflow. RETC Proceedings 41:18–21
Itasca (2004) UDEC Manuals. Itasca Consulting Group Inc, Minneapolis
Karegar S (2007) Investigation the effect of rockmass properties on the amount of water flow into the Underground excavation by numerical analysis and hydro-mechanical coupling model, MSC. Thesis, Amirkabir University
Lei S (1999) An analytical solution for steady flow into a tunnel. Ground Water 37(1):23–26
Mas Ivars D (2006) Water inflow into excavations in fractured rock-a three dimensional hydro-mechanical numerical study. Int J Rock Mech Min Sci 43:705–725
Rutqvist J, Stephansson O (2003) The role of hydro-mechanical coupling in fractured rock engineering. J Hydrogeology 11:7–40
Sharifzadeh M, Mitani Y, Esaki T, Ikemi H, Urakawa F (2005) Hydro-mechanical coupling properties of rock joints under normal and shear mode considering different flow boundary conditions. The 40th U.S. Rock Mechanics Symposium. Anchorage, Alaska, June 25–29
Sharifzadeh M, Karegar S (2006) hydraulic-hydromechanical analysis of rock masses around tunnel using distinct element method, the 7th Iranian Tunnel Conference, Sadagiani M. H. ed. 10–13 July 2006, Tehran-Iran, In Farsi with English Abstract. 540–547
Sharifzadeh M, Karegar S (2007) Hydro-mechanical analysis of the effect of fracture properties on tunnel inflow, Canada–US Rock Mechanics Symposium, 27–31 May, 2007
Stille H, Olsson P (1989) First evaluation of rock mechanics, SKB, Progress Report 25-89-07, Swedish Nuclear Fuel and Waste Management Co.(SKB)
Zhang X, Sanderson DJ (2002) Numerical modeling and analysis of fluid flow and deformation of fractured rock masses, Pergamon
Author information
Authors and Affiliations
Corresponding author
Additional information
The paper is dedicated to Ali Sharifzadeh who lost his life in a tragic car accident during the preparation of this research work.
Rights and permissions
About this article
Cite this article
Sharifzadeh, M., Karegar, S. & Ghorbani, M. Influence of rock mass properties on tunnel inflow using hydromechanical numerical study. Arab J Geosci 6, 169–175 (2013). https://doi.org/10.1007/s12517-011-0320-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12517-011-0320-9