
Abstract
The efficient planning of search and rescue (SAR) operations is highly impactful in the disaster response phase, which offers a limited time window with a declining chance for saving trapped people. The present paper introduces a new robust decision support framework for planning SAR resource deployment in post-disaster districts. A two-stage decomposition approach is applied to formulate the problem as iterative interrelated stages of mixed-integer programming (MIP) models. The first stage presents a robust multi-period allocation model for maximizing fair and effective demand coverage in the affected districts during the entire planning horizon. It takes into account the time-sensitiveness of the operations via a time-dependent demand satisfaction measure and incorporates resource transshipment optimization. The second stage optimizes the routing of the resources allocated in the first stage for each district during the upcoming period. It aims to minimize the weighted sum of SAR demand fulfillment times under consideration of secondary destruction risk, resource collaboration, and rest time requirements. At the end of each period, the proposed framework can be re-executed to capture updated resource, demand, and travel time parameters. To tackle the environment’s inherent uncertainty, an interval-based robust optimization approach is adopted. The proposed framework is solved and analyzed for an urban zone in Iran under an earthquake scenario. Results show that the proposed robust models have superior performance compared to a deterministic approach for adaptation to an uncertain disaster environment. More importantly, they prove to be a strong analysis tool for providing helpful managerial insights for the mitigation and preparedness phases.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Earthquakes have caused severe damage and numerous fatalities in recent years. They continue to catastrophically threaten millions of people’s lives, directly or indirectly, all over the world every year. According to the Significant Earthquake DatabaseFootnote 1 (NGDC/WSD), major earthquakes during the last decade caused more than 400,000 deaths and more than 500,000 injuries, and affected 103 countries. The Sichuan earthquake in China in 2008 and earthquakes in Haiti in 2010 and Nepal in 2015 were among the most destructive and affected more than 56 million people (EM-DAT). Immediately after earthquakes strike (French and Geldermann 2005), possible sudden structural collapses trigger search and rescue (SAR) operations in the response phase of the disaster management cycle, which aims at locating, extricating and stabilizing trapped people (OCHA 2015).
SAR is a fight against time since the survival likelihood of trapped people declines over time (Noji 1997; Olson and Olson 1987). Hence, providing rescue operations in a disaster-impacted zone requires the timely availability of sufficient SAR resources based on the damage magnitude. However, given the response phase setting, especially in major disasters that cause damages over a large zone with multiple districts, these resources can face serious shortages for various reasons: failure in the preparedness phase to devise an agile initial response to the disaster; budget limitations; or logistical constraints. Despite the low presence of SAR teams in the vital initial hours, response teams from various local, national, and international governmental or non-governmental organizations gradually arrive. Therefore, developing well-structured mechanisms to alleviate the intra- and inter-organizational coordination challenges in disaster response is beneficial and important (Quarantelli 1988; Altay and Green 2006; Balcik et al. 2010; Galindo and Batta 2013). The complexity in the availability of resources, on the one hand, and the diminishing survival chances of trapped people on the other hand, highlight the significance of timely resource allocation in the life-saving endeavors of the response phase (Rolland et al. 2010; Mohamadi and Yaghoubi 2017).
When disaster strikes, fair distribution of available resources is also fundamentally important (Altay and Green 2006; Beamon and Balcik 2008; Hu et al. 2016; Erbeyoglu and Bilge 2020). The range of effects from overlooking the notion of fairness in rescue resource allocation decisions extends beyond the response phase. It can lead to undesirable short-term and long-term social, economic, and environmental consequences, such as the occurrence of citizen dissatisfaction, increased complications and health-related issues in the management of dead bodies, overwhelmed debris management, and additional environmental damages, unbalanced relief distribution, and increased recovery efforts.
Although having an optimal allocation scheme is crucial in largely affected zones, its performance is strongly linked with how resources are operationally deployed to serve demand locations in each district. Transportation disruptions and different travel times between demand locations, the risk of secondary destructions leading to time-dependent SAR, resource safety concerns, and trapped population density in each location all highlight how the routing of resources is critical for timely, well-organized and efficient utilization of resources.
This becomes even more critical in urban regions since the presence of densely packed tall buildings, a large population, and complex street patterns can complicate and extend the operations (Statheropoulos et al. 2015). Although effective SAR planning is important, it has received less attention from scholars compared with other operation management topics in the vast body of the disaster management literature. In Iran, with its history of highly destructive earthquakes, the risks of overlooking these challenges endanger the capital, Tehran, more than other cities. Tehran is the largest city in the nation with more than 8,000,000 residents (Statistical Center of Iran 2011), and it is located on three major active faults: the Mosha, North Tehran, and Rey faults (JICA 2000). These faults caused several deadly and destructive earthquakes in the region from 743 to 1170, and again in 1830 (Ambraseys and Melville 1977). The faults in the region are depicted in Fig. 1.

Decision making in such a complex setting characterized by high time-sensitivity, several operational constraints, different objectives (e.g., fairness and effectiveness in the presence of several beneficiaries) coupled with the uncertainty and unpredictability of the situation (Balcik et al. 2010; Galindo and Batta 2013; Hoyos et al. 2015) is a complex and difficult task (Clemen 1996). In such a context, the existence of a decision support framework, which tackles these challenges, can accommodate the decision makers with tools to analyze the situation and to make informed and right choices (Thompson et al. 2006; Cioca and Cioca 2010; Othman et al. 2017).
Inspired by the vulnerability of Tehran in the face of potential earthquakes, and to address the challenging, highly complex and impactful problem of rescue operation management, this study develops a novel robust decision support framework for SAR planning optimization. The proposed framework, which also tackles the inherently uncertain nature of the disaster environment by adopting interval-based robust optimization, integrates two major decisions: (1) allocation of available SAR teams among districts in the affected zone; and (2) routing of allocated resources to serve the demand locations in each district of the zone.
The main contributions of the developed decision support framework can be categorized as follows:
-
Considering fairness and operational efficiency in allocation decisions.
-
Addressing the risks of disruption in the operations from the occurrence of secondary destruction.
-
Considering the inherent uncertainty of disasters by adopting an interval robust optimization framework for SAR allocation and routing.
-
Incorporating two coordination mechanisms to increase management effectiveness in the affected zone.
The rest of this paper is structured as follows. Section 2 reviews related studies in the literature. In Sect. 3, the problem is defined and the proposed framework is presented. Section 4 suggests the robust counterpart models. The application of the proposed framework to an urban district in Tehran is analyzed in Sect. 5. Conclusions are drawn in Sect. 6.
2 Literature review
The present work mainly focuses on search and rescue operations in the earthquake response; but in a broader context, it is related to important decisions about resource allocation, scheduling, and routing in disaster response. The response phase has attracted the attention of the majority of disaster management contributors (Goldschmidt and Kumar 2016), and there is a rich body of research dealing with its different aspects. To not lose focus, the review mainly concerns papers that have studied allocation, scheduling, or routing decisions within the scope of SAR.
2.1 Resource allocation
Zhang et al. (2012) proposed a deterministic model for the allocation of multiple resources to multiple affected nodes to fully serve demand after primary and possible secondary disasters. They applied a heuristic approach to minimize total costs of resource allocation to primary disasters and opportunity costs of arrival at possible secondary ones. Chu and Zhong (2015) addressed the allocation of medical teams shortly after a severe disaster. They defined saving functions for different degrees of severity and maximized the expected number of survivals via a nonlinear mathematical allocation of available teams at different points. Zhang et al. (2016) developed a deterministic two-stage allocation model for restoring interdependent lifeline infrastructure after disruptions. A cost minimization model selects the destroyed components in the first stage, and then restoration scheduling is determined by a makespan minimization model. A heuristic algorithm was proposed to solve the proposed models. Su et al. (2016) addressed the collaboration of various emergency agencies (hospitals, police stations, etc.) to respond to concurrent incidents in disaster zones. They chose the sum of travel times and allocation costs as an objective function, treated the parameters as deterministic, and developed a differential evolution (DE) algorithm as their solution approach. Xiang and Zhuang (2016) developed a queuing network for patients with deteriorating conditions after large-scale disasters and proposed two optimization models for death rate minimization and system time minimization.
2.2 Scheduling and routing
As suggested by Wex et al. (2013), building a service tour for each resource unit in the affected district can be viewed in both the scheduling and routing domains. Fiedrich et al. (2000) developed a dynamic optimization model to schedule technical equipment in SAR, and also considered construction stabilization and rehabilitation of transportation lifeline tasks to minimize fatalities. Chen and Miller-Hooks (2012) developed a multi-stage stochastic program to optimize the routing of homogenous SAR teams in a large urban zone to maximize the number of saved people. Taking the arrival time of SAR teams as a priori versus considering demand, service times, and travel times as random variables, they proposed a sequence of interrelated two-stage stochastic programs as their solution approach and determined the tours of SAR teams. Zheng et al. (2018) presented a multi-objective fuzzy rescue task scheduling and risk minimization formulation and solved it with a multi-objective biogeography optimization (BBO) algorithm. They treated task weights, risk factors, and processing and travel time parameters as fuzzy numbers and considered a nonlinear fuzzy risk exposure function for rescue units.
Yan et al. (2014) proposed a cost minimization logistical support scheduling model with stochastic travel time in a given emergency repair network. Adopting average travel times, they simplified the stochastic model to a deterministic model and used a heuristic decomposition approach. Lei et al. (2015) proposed a deterministic service tardiness minimization model to find a timely dispatching schedule for medical supplies originating from different depots by preplanned routes of medical teams in the aftermath of a disaster. Cao et al. (2018) developed a deterministic multi-objective model for multi-period optimization of emergency rescue vehicles routing in post-disaster operations. In addition to the minimization of the rescue operation time, they considered the accumulated number of an unserved population at each period as the rescue delay cost objective function. Furthermore, by defining a rescue utility score for each demand node, they defined the rescue utility objective function. They used a hybrid NSGA-II and ant colony optimization algorithm to solve the model. Bodaghi et al. (2020) presented a deterministic completion time minimization model to determine the scheduling of expandable and non-expandable resources in emergency operations. To count for the uncertain input parameters, their proposed framework runs the model for a set of plausible scenarios and selects the most common plan. Liu et al. (2020) developed a two-phase efficiency-focused routing optimization model. They evaluated the rescue efficiency of each arc based on its travel time and risk as well as the affected population, secondary hazard probability, and damage severity by a DEA model in the first phase. Considering the loss of efficiency for the remaining arcs over the operation progress, the second phase maximizes the total efficiency score of the selected visit sequence.
Wex et al. (2013) proposed a deterministic binary quadratic formulation to determine service routes of rescue teams with different capabilities to minimize the sum of the weighted completion time. They addressed different greedy, construction, and improvement heuristics, in addition to a Mont Carlo simulation method, to solve their NP-hard model. Extending their research, Schryen et al. (2015) presented two deterministic models to coordinate assignment and scheduling of multi-skill rescue units, with and without collaboration, for serving multiple incidents with different requirements. They proposed a heuristic solution method, which was later improved by a branch-and-price algorithm, developed by Rauchecker and Schryen (2019). Shahparvari et al. (2017) addressed short-notice evacuation of the population in a bush fire disaster with hard time windows. They presented a possibilistic rescue routing model with the objective function of maximizing the number of transferred evacuees. Although their work is in the evacuation stream, it shares similarities with our focused area because it considers capacitated rescue resources with uncertain demand loads and route traveling times. Table 1 gives an overview of the main characteristics of the above research.
Although there is increasing interest in the planning of resources during SAR operations, the considered studies either overlooked existing uncertainty in the disaster response reality or tackled it mostly with fuzzy logic, stochastic optimization, and scenario-based robust optimization approaches. While these methods add value to deterministic models, which ignore the situation’s inherent uncertainty, their results and successful application highly rely on decision-makers’ knowledge of uncertain parameters in the form of membership functions, probability distributions, or possible scenarios (Bozorgi-Amiri et al. 2013). However, many underdeveloped or developing countries have difficulties in accessing well-recorded reliable historical data or high-precision simulations. Hence, determining these characteristics for post-disaster time-sensitive SAR operations can lead to more inaccuracy or be operationally impractical or inefficient. Furthermore, the use of deterministic models with expected values is accompanied by the risk that solutions will be infeasible and/or non-optimal in cases of uncertain input parameter perturbations (Mulvey et al. 1995; Ben-Tal et al. 2009).
Such inefficiencies in the management of scarce rescue resources during disaster response with a slipping rate of survival can lead to higher losses caused by an inefficient allocation of resources among demand locations, waste of SAR teams’ time in non-optimal routes, and higher safety risks for SAR teams. To close this gap, this paper develops a robust SAR planning model based on the interval robust approach proposed by Bertsimas and Sim (2004) to address uncertainty in both the allocation and routing stages. Although a few papers on humanitarian relief (Baron et al. 2011; Najafi et al. 2013; Zhang and Jiang 2014; Zokaee et al. 2016) have applied interval data robust formulations, to the best of the authors’ knowledge, it has not been introduced in the SAR literature.
As the primary mission of humanitarian operations is saving lives and alleviating human suffering, the majority of the studies focus on effectiveness rather than cost-related objectives (Falasca et al. 2009). Most of the previous studies have focused on fatality minimization or operation time minimization, and they have mostly neglected the fairness challenge in allocation and scheduling models. The majority of studies have not looked into the collaboration of non-identical SAR resources in task completion. Furthermore, although task weights can represent task risk rankings, only a few studies have explicitly addressed secondary risks.
Our study is most similar to the work by Schryen et al. (2015) in the assignment and routing of collaborating teams with different skills. We extend their model and contribute to the SAR literature by:
-
Incorporating realistic interval uncertainties and developing a novel robust allocation routing framework.
-
Addressing fairness by maximizing the minimum timely coverage of affected districts by SAR resources in the allocation stage.
-
Considering operation disruption by including secondary destruction risk of locations with or adjacent to unstable structures.
-
Coordinating available resources and command centers in different districts of the impacted zone in two ways. First, since urban zones are often districted, the presented decision support framework considers a multi-district multi-period setting. It better corresponds to the resource assignment decision process that arises at a tactical level in the response phase. Second, it incorporates the resource transshipement between affected districts for effective operations management and loss minimization.
-
Accounting for additional operational constraints in the routing of rescue teams including idling for rest periods and the impact of secondary destructions on the operation duration.
As per the definition, the investigated problem belongs to the broader field of resource-constrained routing and scheduling as well as resource-constrained project scheduling problems (Yan et al. 2009; Hartmann and Briskorn 2010; Paraskevopoulos et al. 2017). Addressing both allocation and routing issues in these problems makes them computationally complex problems that belong to NP-hard class (Garey and Johnson 1990; Miller and Franz 1996; Lenstra and Rinnooy Kan 1981; Laporte 2007). Furthermore, there is even incremental complexity due to the consideration of real-world constraints reflected from the interviews with the SAR experts, such as the arrival of new resources over the planning horizon, transshipment of resources between districts, resource collaboration in demand locations, and time-sensitive SAR times (Schiffer et al. 2019). In the related literature, the assignment of resources and their service tours in SAR problems and the other variants of resource-constrained project scheduling or routing problems are modeled and solved following simultaneous or two-stages decomposition approaches (Paraskevopoulos et al. 2017; Yalçındağ et al. 2016). However, the intrinsic complexity of the problem, which contradicts the need for decision-making agility, especially in disaster response, has made the decomposition approaches efficient and interesting methods being applied in numerous studies (Schmid et al. 2013; Rolland et al. 2010; Nickel et al. 2012; Allaoua et al. 2013; Yalçındağ et al. 2016; Can and Ulusoy 2014; Misir et al. 2015; Yalçındağ and Matta 2017; Attia et al. 2019; Dahmen et al. 2020, Memari et al. 2020).
To overcome the drawback of simultaneous modelling of both decisions while benefiting from joint allocation routing decision-making, a two-stage framework is proposed in this study. The first stage takes arriving resource availability times as a priori and builds robust assignment of available and incoming teams to affected districts over a multi-period horizon for SAR response. This stage maximizes allocation fairness by maximizing minimum SAR demand coverage over the whole zone and determines: (1) the allocated number of resources in each district for each period; and (2) resource transfers to other districts or discharging decisions over the planning horizon. The outputs of the first stage for the first period of the planning horizon are fed into the second stage. The second stage models the routing of each district’s allocated teams among its demand locations during the several hours’ duration of that period. It integrates fatality and time minimization by taking the trapped population in each demand location of the district as the importance weight in an objective function of minimizing the weighted sum of task completion times. The model allows team collaboration and takes into account SAR tasks’ non-preemptive characteristics. To have the optimal weighted sum of demand locations’ SAR completion times, this stage determine (1) the sequence of demand location visits for each team; and (2) the amount of SAR activity of each team for each demand location on their routes.
After implementing the first period’s allocation and routing decisions, the planning framework is run again for the remaining periods of the horizon. In the first stage, the allocation model is solved again to capture the actual status of operation progress and upcoming updates on input parameters. Afterward, with the new allocation scheme, the second stage is run with the updated data to optimize the routing of allocated teams for the next period. This cycle continues until the end of the SAR planning horizon in the response phase.
Proactive approaches in the mitigation and preparedness phases play a key role in reducing disaster loss in the built environment (Mojtahedi and Lan Oo 2014). Therefore, the proposed decision support framework is designed, not only to help SAR planning during the response phase but more importantly, to also equip relevant disaster stakeholders with a tool for more effective use of resources in investment, training, and capability-building decisions during the risk mitigation and preparedness phases.
3 Problem description
This study proposes a two-stage approach to optimize the planning of SAR operations in disaster-impacted zones. It assumes that the affected zone is divided into several districts. Each district, with several demand locations, has three types of demand based on the damage severity and requires teams with a compatible set of skills to serve them.
The first stage addresses the coverage of affected districts’ SAR demand over the entire SAR timeline in the response phase and formulates it as a multi-period fair resource allocation model (MPFRAM). For each severity type, the model takes the total estimated SAR demand in each district and computes the minimum demand coverage over the entire affected zone. Based on the importance weight of each demand type, the objective function maximizes the allocation fairness by maximizing the weighted sum of all demand types’ minimum coverage over the affected zone.
To account for allocation effectiveness about deteriorating chances of saving lives, a decreasing utility parameter is considered for allocation in each period. Incorporation of this parameter, which is driven by the declining survival rate of trapped people after large-scale disasters (Fiedrich et al. 2000), represents the importance of operation effectiveness and favorability of quick demand response (Gralla et al. 2014; Erbeyoglu and Bilge 2020). Having the utility parameters as the weights, each district’s demand satisfaction is calculated as the weighted sum of allocated SAR work over the whole horizon. To have optimal utilization of capacities against demand, the model allows for an exchange of SAR units between districts wherever it is beneficial, according to demand coverage status and district distances. As SAR operations evolve and response time shrinks, fewer SAR teams are required and the affected zone prepares for debris management and road restoration. So, the model considers both the deployment and release of SAR units in decision variables. However, due to the usual scarcity of resources versus overwhelming demand, releasing rescue SAR units are not expected unless in the last periods. The main assumptions and outcomes of this stage can be summarized as follows.
Assumptions:
-
SAR demand and travel time parameters are considered uncertain and assumed to be symmetrically distributed at the given intervals.
-
The number of arriving new SAR teams at each period is assumed to be known.
-
Each period consists of T hours (e.g., 12 h), and T can be set based on decision environment circumstances.
-
The utility of resource allocation in each period represents that period’s demand coverage efficiency and declines over time.
-
SAR teams can travel between districts to improve SAR capacity utilization versus demand. However, the travel time between resource-exchanging districts decreases the amount of possible SAR work.
Outputs:
-
The allocated number of resources in each district for each period.
-
The resource transfer to other districts or discharging decisions over the planning horizon.
The outputs of the first stage for the first period are fed into the second stage. This stage addresses the deployment of allocated teams in the first period of the planning horizon for each district. It formulates the problem as a single period capacitated resource routing model (SPCRRM) and optimizes the weighted sum of SAR task completion times in the district’s demand locations. Each demand location needs the SAR operation in one of the three types of demand based on its damage severity. Similarly and with hierarchical levels of skills, each team has a specific capability degree, which qualifies them for serving the respective demand type and less severe situations. Due to the uncertain changing environment in the aftermath of natural disasters, SAR operation times, the number of trapped people, and the travel time between demand locations within each district are assumed to be uncertain, and an interval robust approach is adopted to deal with that.
Some of the demand locations, which include residential buildings, schools, hotels, malls, and urban infrastructure, may be at a higher risk of further destruction and extended operation time due to situations like being located on the coastline with tsunami risk, or being adjunct to partially-collapsed unstable structures. To adapt the realistic vulnerability of rescue success to operation timing in such situations, an estimated threshold time is considered for high-priority demand locations. These locations, which should be identified based on expert input, are assumed to require longer operation time if they are not served before their threshold time.
The amount of required operation time at each demand location is stated in terms of hours. It may be accomplished by several teams and can be estimated based on building dimensions, approximate trapped population, damage severity, etc. The model adopts the realistic constraint of work-rest periods in difficult working conditions for SAR operations. This assumption becomes vital in team scheduling when the disaster-impacted zone is exposed to infectious disease or dangerous materials (Sawik 2010). The maximum limit of working hours and the rest duration is assumed a priori, but teams are not allowed to interrupt an unfinished task, even if it exceeds their shift time. If several teams serve at a single demand location, their service times should be overlapping, or follow an end-to-start relationship with at least one other team until the task is completed. Any task that is planned to be started during that period should be completed and removed from the district’s total SAR demand. The start time of each team on the last location of their tour, along with their assigned SAR activity hours, determine their availability time for the next period. The main outputs of this stage are as follows:
-
The sequence of demand location visits for each team.
-
The amount of SAR activity of each team in each demand location on their route.
-
The expected operation finish time for each demand location based on the start of SAR and the team engagement amounts. This also determines team availability times for the next period, whether in the same district, in the transfer link’s destination district, or out of the SAR mission.
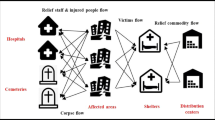
Due to the very vague status of input parameters over the whole search and rescue phase (120 h), a dynamically changing environment, and the rapidly incoming updated data, SPCRRM considers a single period of 12 h duration. After implementing the allocation and routing decisions of the first period, the planning horizon is updated and the proposed framework is re-run to capture the actual operation progress and information updates. By the inclusion of realized remaining demand in each district and other input parameter updated vales, MPFRAM is run for the remaining periods of the horizon. Building on the outputs of the first stage and benefiting from the newly arrived data, the second stage SPCRRM is run for the next period to optimize the routing of allocated teams in each district. This cycle is repeated until the end of the SAR timeline in the response phase. The flow of information between the two stages is outlined in Fig. 2. Feeding updated input data into the models requires a well-designed and stable communication infrastructure, and can highly impact the effectiveness of search and rescue operations (Mohamadi et al. 2019).

SAR two-stage decision support framework
The next two sub-sections present the formulations of the problem as mixed-integer linear programming (MILP) models.
3.1 First stage: MPFRAM
The mathematical model in the first stage uses the following notation and decision variables.
Indices and parameters:
\( s \) | Demand types \( (s \in \{ 1,2,3\} ) \) |
\( k,k^{{\prime }} \) | Districts in the affected zone \( (k,k^{{\prime }} \in \{ 1,2, \ldots ,R\} ) \) |
\( t \) | T-hour SAR deployment planning periods \( (t \in \{ 1,2, \ldots ,Z\} ) \) |
\( \theta_{t} \) | Estimated survival utility in period t |
\( d_{sk} \) | Total required SAR operation type s in district k |
\( c_{st} \) | Number of SAR teams with type s capability arriving in the impacted zone at period t |
\( g_{{kk^{{\prime }} }} \) | Travel time between district k and k’ |
\( w_{s} \) | Importance weight of missions with severity degree of s |
\( T \) | Duration of each SAR deployment planning period |
Decision variables:
\( x_{sk}^{t} \) | Number of teams with type s capability allocated to district k in period t |
\( y_{{skk^{{\prime }} t}} \) | Number of teams with type s capability transferred from district k to k’ in period t |
\( h_{skt} \) | Number of newly arrived teams with type s capability allocated to district k in period t |
\( f_{skt} \) | Number of excess teams with type s capability in district k to leave in period t |
\( cov_{s} \) | Minimum effective coverage of demand for task type s among affected districts |
\( z_{st} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If there is an increase in the number of allocated teams for demand type s in the affected zone from period t − 1 to t Otherwise |
The model is formulated as follows:
s.t.
To account for fair allocation, the objective function maximizes the demand coverage for the district with the lowest coverage score. This also results in minimizing the gap between the coverage statuses of different districts, and hence, fairness is taken into consideration. Since there are different demand types for severity, the objective function takes the weighted sum of all three types’ minimum level of coverage over all the districts in the affected zone.
Constraints (2) and (3) **calculate the number of SAR teams in each district. Each district may cover its demand from multiple sources, including teams allocated in the previous period, transferred teams from other districts, and allocation of new teams that reach to the hot zone at each period. Constraint (4) is a capacity constraint for the total number of new teams assigned in each period over the whole affected zone. As operations progress, for each demand type for which the amount of allocated resources exceeds the remaining total demand, the operation center should decide to discharge excess teams (Constraint (5)). These teams can either be assigned as fresh resources for satisfying the remaining demand in less severe tasks and be taken into the updated \( c_{st} \) parameter, or dispatched for further operations of the response phase, like relief item distribution.
Constraint (6) computes the minimum coverage level for each demand type over the affected districts. Although the transshipment of resources enables better resource utilization, the time spent on traveling between the districts reduces the remaining time for the operation in the destination district. Hence, the lost time is subtracted from the resources’ effective allocated times. To incorporate the reduction in the survival rate of trapped people over response time shrinkage, the effectiveness of allocated resources in each period is considered by the help of utility weights. Sign constraints are given in Constraints (7) and (8).
After solving the first stage, the number of allocated teams for each demand type and each district in the first period is fed into SPCRRM in the second stage to plan the teams’ SAR activities in each district. It is a single-period capacitated routing model that schedule the operations of the allocated teams in each district for the duration (e.g. 12 h) of the first period of the remaining planning horizon.
3.2 Second stage: SPCRRM
The mathematical model in the second stage uses the following notation and decision variables.
Indices and parameters:
\( i \) | SAR teams \( \left( {i \in \left\{ {1,2, \ldots ,N} \right\}} \right) \) |
\( j,j^{{\prime }} \) | Demand locations, where 1 and m are dummy nodes representing the command base \( (j,j^{{\prime }} \in \{ 1,2, \ldots ,m\} ) \) |
\( d_{j} \) | Location j’s demand type \( d_{j} \in \left\{ {1,2,3} \right\} \) |
\( p_{j} \) | People trapped in location j |
\( c_{i} \) | Team i’s capability type \( c_{i} \in \left\{ {1,2,3} \right\} \) |
\( g_{jj'} \) | Travel time between location j and j’ |
\( \epsilon_{j} \) | Estimated threshold time at which SAR time at location j increases (due to secondary destructions) |
\( b_{j}^{{\prime }} \) | Required SAR time in location j before the threshold time |
\( a_{j} \) | Additional SAR time in location j after the threshold time |
\( \alpha_{i} \) | Time at which team i is available in the affected district |
\( L \) | Minimum acceptable involvement of a team in the operation at a location |
\( T \) | Duration of the route planning period |
\( \tau \) | Shift time |
\( \rho \) | Rest time |
Decision variables:
\( s_{ij} \) | Start time of team i at location j |
\( s_{j}^{{\prime }} \) | Start time of SAR at location j |
\( f_{j} \) | Completion time of SAR at location j |
\( b_{ij} \) | Amount of SAR activity by team i at location j |
\( w_{ij} \) | Amount of continuous SAR activity along the route by team i after visiting location j |
\( q_{j}^{{\prime }} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If location j is included in the schedule Otherwise |
\( q_{ij} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If location j is allocated to team i Otherwise |
\( y_{j} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If SAR starts at location j after its threshold time Otherwise |
\( x_{ij} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If team i arrives first at location j Otherwise |
\( v_{{ijj^{{\prime }} }} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If team i visits location j’ after location j along their route Otherwise |
\( r_{ij} = \left\{ {\begin{array}{*{20}c} 1 \\ 0 \\ \end{array} } \right. \) | If team i needs to rest after visiting location j Otherwise |
And the model is formulated as follows:
s.t.
The objective function (9) minimizes the weighted sum of SAR completion times in affected locations. Since the populations of trapped people in the demand locations are used as importance weights, the objective function can be interpreted as the total man-hours waiting to receive SAR services over all the locations in the district. Constraint (10) is an integrality constraint that makes sure that locations with assigned SAR teams are selected in the routing plan. Constraint (11) guarantees that the start time of the SAR mission by each team at each selected demand location cannot exceed the duration of the planning period. Each started SAR activity will continue until completion. The completion time, which might be later than the period’s duration, determines the teams’ availability times in the next period. Only qualified teams may get involved in serving each demand type, and this case is addressed in the whole model via appropriate condition(s). Teams are ready to start their route once they arrive at the command base, as shown in Constraint (12).
Constraints (13) to (16) calculate the start time of the SAR at each demand location as the earliest time of operation by the allocated qualified teams.
Constraint (17) ensures that each selected demand location is fully served by contributing teams. Constraint (18) guarantees that if the operation starts at a location, there should be at least one team present to complete the job; in other words, the work cannot be interrupted, and the involved teams may not leave the demand location prior the SAR completion unless another team continues the mission.
Constraint (19) states that once a team is allocated to a demand location, they should serve in the mission for a minimum amount of time. Constraints (20) and (21) determine whether each location receives its required SAR before the threshold time.
Constraints (22) to (26) compute the total continuous work of each team, along with their route after visiting each demand location. As shown in Constraints (22) to (24), the consecutive work of a team after a location is equal to their SAR activity in that location only if this node is visited right after a rest time or at the start of the route. Constraints (25) and (26) accumulate the SAR activities of the team at the linked locations along the route if the team’s working shift is not finished yet.
Constraints (27) and (28) determine the necessity of rest time for each team after each SAR visit. Constraint (29) ensures the integrality relation of assigning the team for SAR activity on each demand location and their work amount.
Constraint (30) calculates the start time of operation by each team at each demand location along their route. Constraints (31) and (32) ensure that each selected demand location has a predecessor and successor node on the team’s route. The finish time of SAR at each location is calculated in Constraint (33) as the latest time of operation completion by the assigned teams. While the start of SAR at each selected demand location should be within the routing period’s duration, the finish time might be later, since no interruption is allowed until the selected location’s total demand is satisfied. Sign constraints are given in Constraints (34) and (35).
The solution provided by solving this stage flows back to the first stage to complete the planning framework. This feedback, along with the externally updated information, enables the first stage to re-optimize the allocation decisions for the remaining horizon and to continue the operation planning.
In the ever-changing disaster environment, the inherent uncertainty of parameters limits the applicability of deterministic models. Hence, this section introduces the model’s interval-based robust counterpart, which keeps the model flexible and robust in real-world applications.
4 Interval data robust optimization
In practice in an uncertain environment, there are parameters with unknown exact values that may be actualized differently from their estimated nominal values. These gaps are potentially capable of violating some constraints and hurting solution optimality. Therefore, there is a need for implementing solution approaches that remain robust in terms of feasibility and solution quality in the presence of uncertainty (Bertsimas and Sim 2004).
Soyster (1973) was the first to develop a model to meet this need. However, his model, which constructed a solution feasible for all the data in a convex set, was too conservative. This first attempt was further developed by Ben-Tal and Nemirovski (1998, 1999, 2000), El-Ghaoui and Lebret (1997), El-Ghaoui et al. (1998), Bertsimas and Sim (2004) and Bertsimas and Thiele (2006). Bertsimas and Sim (2004) proposed a solution approach for linear mathematical models with an uncertain coefficient matrix. Their approach does not increase the model’s complexity and has a flexible in a conservatism level; it is briefly described below.
Bertsimas and Sim (2004) considered the following model and assumed that the i-th constraint has \( \varGamma_{i} \) uncertain technological coefficients with values that lie in a stochastic symmetric interval \( \left[ {\bar{a}_{ij} - \hat{a}_{ij} , \bar{a}_{ij} + \hat{a}_{ij} } \right] \), and exactly one parameter with a \( \varGamma_{i} - \varGamma_{i} \) perturbation, where \( \varGamma_{j} \) is not necessarily an integer and may take up any value in \( \left[ {0,\left| {J_{i} } \right|} \right] \) with \( J_{i} \) being the set of uncertain coefficients in constraint i.
To ensure the model stays feasible after the Γi coefficients’ perturbations, they rewrote the model with the help of a protection function \( \beta_{i} \left( {x^{*} .\varGamma_{i} } \right) \):
where \( \beta_{i} \left( {x^{*} ,{{\varGamma }}_{\text{i}} } \right) = \mathop {\hbox{max} }\nolimits_{{\left\{ {S_{i} \cup \left\{ {t_{i} } \right\} |S_{i} \subseteq J_{i} ,\left| {S_{i} } \right| = \varGamma_{i} .t_{i} \in J_{i} { \setminus }S_{i} } \right\}}} \left\{ {\mathop \sum \limits_{{j \in S_{i} }} {\hat{\text{a}}}_{\text{ij}} \left| {{\text{x}}_{\text{j}}^{ *} } \right| + \left( {\varGamma_{i} - \varGamma_{i} } \right){\hat{\text{a}}}_{\text{ij}} \left| {{\text{x}}_{\text{j}}^{ *} } \right|} \right\} \).
\( \beta_{i} \left( {x^{*} ,{{\varGamma }}_{\text{i}} } \right) \) protects the feasibility by embedding the largest possible deviation of left-hand side coefficients in i-th constraint. So it needs to find a Γi set of coefficients that can cause the biggest perturbation:
In this model, positive values of \( z_{ij} \) represent the coefficients in the \( \varGamma_{i} \) uncertainty level whose perturbation can cause the biggest risk of violating the right-hand side in the i-th Constraint (36) and (37). Since this model is feasible and bounded, according to the strong duality property, its dual problem is also feasible and bounded, and its objective value is equal to the primal. If \( z_{i} \) and \( p_{ij} \) are the auxiliary dual variables of Model (38), one can rewrite Model (37) into its ID robust counterpart model (39) by replacing \( \beta_{i} \left( {x^{*} .\varGamma_{i} } \right) \) with the dual model of Model (38). The use of \( \varGamma_{i} \), which is called “the budget of uncertainty” (BoU), facilitates user flexibility in calibrating the robustness of the method based on the preferred conservatism level (Bertsimas et al. 2011).
Using \( \varGamma_{i} \) as the allowed summation of perturbations in uncertain parameters of row i, this approach enables the user to make the trade-off between the probability of violating the i-th constraint and the effect on the objective function of the nominal problem (Bertsimas et al. 2011). Bertsimas and Sim (2004) proved that if more than \( \varGamma_{i} \) uncertain parameters change in the i-th constraint, the probability of the constraint’s violation is at most \( B\left( {n,\varGamma_{i} } \right) \), which is approximated by the following bound:
where \( n = \left| {J_{i} } \right| \) and \( \phi \left( \right) \) is the cumulative distribution function of a standard normal variable.
Hence, one can protect the solution against infeasibility by choosing an appropriate level of \( \varGamma_{i} \), depending on the number of uncertain parameters present in that constraint. Testing different pairs of \( \left( {n,\varGamma_{i} } \right) \), the proposed approach is capable of guaranteeing a robust feasible solution without sacrificing too much optimality.
In the case of constraints that are similar to Constraint (6), in which there is only one uncertain demand parameter per constraint for each \( \left( {s,k} \right) \), Bertsimas and Sim’s approach results in several BoU parameters \( \varGamma_{s}^{k} \), each ranging from 0 to 1 for the demand uncertainty in each constraint. This means that even examining only 0 and 1 options for each \( d_{sk} \)’s BoU leads to \( 2^{s *k} \) states, which is computationally infeasible to deal with. Therefore, Bertsimas and Thiele (2006) extended the work of Bertsimas and Sim (2004) to account for such situations. Their proposed robust method considered an accumulated conservatism parameter \( \varGamma \) for the relevant set of uncertain parameters, which are dispersed among different rows of constraints.
In the above example, s denotes the demand type and remains in the conservatism level definition. While, the notion of the district is removed, and the method considers a single \( \varGamma_{s} \) to accumulate the budget of uncertainty for all districts’ demand type s. Therefore, each district’s share of demand uncertainty becomes \( \frac{{\varGamma_{s} }}{R} \), where R is the number of districts.
In line with the characteristics of both studies, this paper adopts the interval data robust method presented by Bertsimas and Sim (2004) and Bertsimas and Thiele (2006) to address uncertain parameters in both stages. SAR demand and the travel time parameters in the first stage, and trapped population, required SAR times, threshold times, and travel time parameters in the second stage are treated as uncertain and are considered in symmetric interval forms. These intervals are fed in by damage estimation applications and systems, expert input, and information updates received during the operations.
4.1 MPFRAM robust counterpart
\( \varGamma_{k}^{2} \) is the number of districts with stochastic travel times from district k. \( r_{k} \) and \( v_{{kk^{{\prime }} }} \) are dual variables of the protection function of districts’ travel times. Since there are R districts considered in the first-stage allocation formulation, \( \frac{{\varGamma_{s}^{1} }}{R} \) is defined as the level of conservatism for demand parameters as stated in Eq. (40). Furthermore, \( q_{sk} \) and \( u_{sk} \) are the corresponding regular dual variables for protecting the model’s feasibility against demand uncertainty. Equations (40) to (43) substitute Constraint (6) and build the first stage’s robust counterpart.
4.2 SPCRRM robust counterpart
\( \varGamma \), which is independently defined for each district in the second stage, is the number of demand locations with uncertain populations. \( \zeta^{1} \) and \( \zeta_{j}^{2} \) are defined to address duality in the protective function of population coefficients. Equation (9) is replaced with Eqs. (44) and (45). To adopt Bertsimas and Sim’s (2004) approach in the uncertain coefficients in the objective function, the worst case occurs when all the locations have higher populations, worsening the weighted summation of completion times. So, in the presence of conservatism level \( \varGamma \), the objective function can be written as \( {\text{Min}} = \mathop \sum \nolimits_{j} p_{j} f_{j} + \beta_{j} \left( {f_{j}^{*} ,{{\varGamma }}} \right) \), and the rest follows the approach introduced by Bertsimas and Sim (2004).
Since there are (m − 2) demand locations in each district, \( \varGamma^{3} \) determines the conservatism level of the SAR times of all locations. Therefore, \( \frac{{\varGamma^{3} }}{m - 2} \) is each location’s budget of uncertainty for SAR time. \( \alpha_{j}^{1} \) and \( \alpha_{j}^{2} \) are the dual variables of the SAR time uncertainty protection function. Let m’ be the number of locations in the risk of secondary destruction and operation time expansion, then \( \frac{{\varGamma^{4} }}{{m^{\prime}}} \) is considered to be each high-risk location’s price of robustness for uncertain additional operation time. \( \beta_{j}^{1} \) and \( \beta_{j}^{2} \) are the dual variables to protect the model’s feasibility against the uncertainty of required additional SAR time after secondary destruction. Equations (46) to (49) replace Eqs. (17) and (18).
Similarly, \( \frac{{\varGamma^{5} }}{{m^{{\prime }} }} \) is considered as the conservatism level for uncertain threshold times in demand locations with the risk of operation expansion. Since uncertain threshold times appear in two different sets of constraints, two protection functions are required. One addresses the feasibility of Constraint (20) with dual variables \( \gamma_{j}^{1} \) and \( \gamma_{j}^{2} \) by Eqs. (50) and (52); and one protects Constraint (21) against the threshold time’s uncertainty by \( \gamma_{j}^{{{\prime }1}} \) and \( \gamma_{j}^{{{\prime }2}} \) in Eqs. (51) and (53). There are \( \left( {m - 2} \right)^{2} \) possible independent outflow links between the demand locations in the second stage; and therefore, \( \frac{{\varGamma^{6} }}{{\left( {m - 2} \right)^{2} }} \) defines the level of conservatism for travel times for each pair of locations. Since in Eq. (30), the uncertain travel time parameter is not multiplied by any variable, the constraint’s feasibility protection is obtained by the inclusion of travel time perturbation based on its budget of uncertainty.
Replacing Eqs. (9), (17), (18), (20), (21) and (30) with Eqs. (44) to (55) builds the second stage’s robust counterpart.
5 Case study
To show the effectiveness of the proposed model, this section describes a robust SAR allocation and routing example based on an earthquake scenario in an urban part of Iran’s capital, Tehran. It is the most populated city in the country, with 22 municipal districts, and is located in the southern foothills of the Alborz Mountains, in an earthquake-prone region (Fig. 3). It is surrounded by three major seismically active faults, Mosha to the northeast, North Tehran to the north, and Rei to the south, as well as hidden faults underneath the whole city’s sediment layers (JICA 2000). The city has expanded tremendously over the past 50 years, and now has more than 8,000,000 inhabitants and covers an area of 730 km2. It is now considered one of the cities most vulnerable to earthquakes in the world (Amini Hosseini et al. 2014).

Tehran urban District 6 with 6 subdistricts (Google map, Ghajari et al. 2017)
The scenario considered, called the Tehran floating earthquake scenario (TFES), was developed to assess the city’s relative vulnerability and considers the hidden faults underneath the city. In the case of an earthquake caused by these faults, which are simulated to be 13 km in length and 10 km in width, everywhere in the city would have a similar probability of occurrence, with a seismic intensity of 8–9 on the MMI scale (JICA 2000; Ashtari et al. 2005).
Inspired by the results of the TFES simulation for a nighttime earthquake, this section presents the results of MPFAM implementation in one of Tehran’s municipal districts (District 6) for a 6-period planning horizon and elaborates on the findings from solving SPCRRM in one of its subdistricts for the first period.
District 6 has an area of 21 km2 and nearly 235,000 inhabitants and is located in the central part of the capital. It is one of the oldest districts in the city and has special characteristics compared to the rest,Footnote 2 which highlights the importance of SAR planning for successful loss prevention, not only at the district level but also beyond the district at the city level.
-
An average of 9% of its population is above 64 years old, putting this district among the top three for the oldest population and among the most vulnerable districts, compared with an average of 6% in the Tehran megacity.
-
Up to 26% of its buildings are more than 30 years old.
-
It hosts the city’s second-largest waste collection center and one of its five water treatment plants.
-
This district is the second frequent traffic destination among Tehran’s 22 districts. It is located in a focal part with access to the city’s main urban routes and is one of the key passages for delivering aid to the southern districts.
Figure 3 introduce the district with its subdistricts, and Table 2 presents the TFESFootnote 3 simulation results for a nighttime earthquake. The nominal values for SAR demand and travel times were extrapolated by SAR experts based on several criteria such as the number and severity of damaged buildings, average number of floors, average number of households in the buildings, and casualty estimates.
5.1 First-stage results
To test the results for the first stage, uncertainty budgets (\( \varGamma_{l}^{1} , \varGamma_{k}^{2} \)) are set as (5, 3, 2) and (4, 3, 3, 3, 4, 3) with 20% perturbation from nominal values. So, 5 out of 6 subdistricts have perturbations from their first-type demand nominal values, half have second-type demand different from nominal values, and 33% are not at their nominal third-type demand. Similarly, the travel time from the subdistrict 1 to four other subdistricts and the travel times from subdistrict 4 to three other subdistricts are perturbed.
Figure 4 depicts the number of SAR units allocated to each subdistrict by the implementation of MPFRAM. The total number of allocated teams in each period and for each demand type represent the considered capacity of SAR resources and their distribution over the planning horizon. In the initial hours after the earthquake, only a small number of teams are available to carry out the SAR operations. The number of available teams for the lowest demand type (least severe) is relatively higher than for the other two since volunteer citizens from the neighborhood can cooperate in these cases. For more serious damage, the district’s capacity might not be sufficient, and the operations will depend on the arrival of professional resources from other districts, cities or countries, depending on the demand size.

First-stage results
As can be seen, to restore the maximum minimum weighted coverage among the subdistricts, subdistricts 4 and 6, with relatively more extensive damage, receive a major share of available capacity.
5.1.1 Sensitivity analysis
To check the results’ sensitivity to different situations, different levels of demand, and capacity are tested. Figure 5 illustrates the impacts of both SAR resource capacity expansion and improving their availability lead time for subdistrict demand coverage.

Coverage improvement versus SAR response
This analysis, which can be used as a simulation tool, is capable of providing decision-makers with helpful managerial insights into “next steps” for improving the safety of the city’s residents. Following are the practical insights that can be deduced from sensitivity analysis of the studied case:
-
For all three severity degrees, outcomes are more sensitive to the availability lead time of SAR teams than to increased numbers of resources.
-
Highly qualified teams that are competent to be involved in severity type 3 missions are more behind on demand compared with the other types; hence, improvements in either capacity or arrival lead time of these teams can significantly improve results.
-
Although it is very difficult to build capacity or decrease availability lead time of highly qualified teams for all the subdistricts in the district, it is vital for the district’s SAR success that the most vulnerable subdistricts (4 and 6) be marked for advanced development and training of potential local and neighbor professionals. As can be seen in the chart, there is a huge 40% opportunity that can be unlocked by a 20% increase in the number of teams and cutting the availability lead time by half.
-
Lack of visible improvement in the results for the second severity degree group highlights the first priority, which is to fill the major gap between demand and SAR capacity.
-
Considering that it is easier to build teams for the first-degree severity type, the analysis confirms at least 30% potential improvement if each subdistrict trains eligible and sufficient local teams.
Since the main damage to the districts’ residents’ safety, accessibility of roads, and operability of urban services is caused by medium and severe destruction, the sensitivity of SAR success to the vulnerability of structures to destruction is studied. Figure 6 presents a simulated glide path for improving district coverage by decreasing damage to buildings (within the same SAR capacity). This glide path, together with district vulnerability and strategic character, can help to leverage relevant managerial decisions about reinforcement/renovation timelines and priorities. Using the proposed allocation model as a simulation tool for sensitivity analysis of SAR demand coverage before an earthquake strikes can be beneficial for disaster management authorities in both the risk mitigation and preparedness phases.

Coverage improvement glide path
5.1.2 Impact of different levels of uncertainty budgets
Furthermore, different levels of uncertainty budgets are used to show the trade-off between the model’s optimality and robustness in the allocation stage (Table 3). This analysis can help decision-makers with setting the model’s conservatism to maintain feasibility and closeness-to-optimality when faced with uncertainty. As expected, eliminating deterministic and worst-case scenarios, the objective function follows a mild worsening trend when the model is immunized for higher perturbations and uncertainty budgets.
5.1.3 Performance analysis of proposed robust MPFRAM
To test the performance of the decisions suggested by the proposed robust model versus the deterministic approach, additional experiments are implemented. To this end, at perturbation levels of 20% and 30%, models with three sets of uncertainty budget s(\( \varGamma_{l}^{1} , \varGamma_{k}^{2} \)) equal to (6, 5), (4, 3) and (3, 2.5), leading respectively to 99%, 90% and 80% feasibility reliability, are implemented. For each perturbation level, the performance of solutions provided by the robust models and the deterministic approach is then evaluated versus 20 uniformly generated random realizations of the uncertain parameters from their respective intervals. The outputs are compared based on their performances after inserting the proposed allocation decisions in Eqs. (1) to (8). For each model, three sub-measures are calculated to define total performance: (1) the new objective function value from the realized \( cov_{s} \); (2) the coverage unfairness at each severity degree based on the standard deviation of realized coverages between the subdistricts; and (3) the violation of Constraint (6). The latter is the difference between a model’s output for guaranteed coverage and its realized possible coverage of realized demand by the proposed allocation decisions. This infeasibility, which is of very high importance, means missed coverage promises and represents distorted resource requirement assessment.
To penalize unfavorable sub-measures and to unify the scale of all three parts of the measure, the total of realized demands for each type is used as a multiplier. The measure’s mean and its range of changes for different random realizations are calculated in each model.
The results presented in Fig. 7 demonstrate that the robust approach outperforms the deterministic model. In all cases, the robust approaches show a minimum performance higher than the deterministic model’s average measure value. Also, this superiority is even reinforced in more volatile environments with higher possible perturbations. At both uncertainty levels, the performance gap between the robust and deterministic approaches grows as the uncertainty budget increases. In other words, higher conservatism and solution immunization lead to lower deviations from promised coverage levels and to fewer resource miscalculations. While the appropriate conservatism level depends on the decision-maker’s preference, the assessment shows that the robust allocation model presents a better fit for resource planning in SAR operations.

Performance of robust and deterministic approaches under uncertain parameter realizations at two perturbation levels
5.2 Second-stage results
To test the model’s performance in the second stage, subdistrict 4 (Fig. 3), with an area of 4.9 km2 and 52,000 habitants, is selected. We consider six demand locations in this subdistrict according to the municipality neighborhood definitions. Demand location 1, with a high-risk CNG station and in proximity to four very tall buildings, is at risk of secondary destruction after the earthquake, and hence is considered for operation time expansion after the threshold time. In the second stage, (6, 4, 1, 1, 10) are chosen as (\( \varGamma ,\varGamma^{3} ,\varGamma^{4} ,\varGamma^{5} ,\varGamma^{6} \)). This means that all demand locations’ population parameters are assumed to be different from the nominal values. 66% of the locations have perturbed SAR processing time, only one of the locations with secondary destruction risk is assumed to have additional processing time and a threshold time different from nominal values, and finally, the travel time on 10 travel links have perturbations. Five teams are considered as the available resources for SAR routing. Teams 1 and 2 are capable only for type 1 severity, teams 3 and 4 are qualified for type 2 severity, and team 5 is capable of the most severe demand type. The other input dataFootnote 4 used to model the routing can be found in Table 4.
The second-stage model is run for a 12-hour period in Subdistrict 4, with 6 locations and 5 available teams, and the routing plan for allocated teams is determined. Figure 8 shows the activity sequence for each SAR team in Subdistrict 4. Teams 1 and 2 can only satisfy the SAR demand at the first location due to the demand severity compatibility. To shorten the completion time, both teams need to work concurrently. Location 2, with demand type 2, receives its required resources for SAR from both teams 3 and 4. Teams are not allowed to interrupt the operations unless another team gets involved. That is why the model decides to release team 3 to respond to locations 4 and 5, but keeps team 4 involved to fully satisfy location 2’s demands. Tasks that take the resource capacities beyond the current planning period get introduced in the next period routing model as new tasks with their remained processing time. Team 3 enters a rest period after it leaves location 2 since it gets to its shift limit. It then continues to visit locations 4 and 5. Team 5 is the only team capable of handling the severe demand type. Hence, this resource capacity is not sufficient for both locations 3 and 6, so the model chooses to serve location 3 due to its higher population. And hence, location 6 remains unserved.

SAR team’ activity sequences in Subdistrict 4
5.2.1 Sensitivity analysis
To estimate the operations’ success in minimizing the weighted SAR completion times under different circumstances, sensitivity analysis is completed in different categories. Table 5 shows that the delayed availability of SAR teams can worsen the objective function values. Since location 1, with the first severity level, is at risk for operation time expansion by delayed operation and has a similar population to location 3 in the third severity category, scenarios 3 and 4 lead to similar weighted sums of completion times.
Due to different ratios of resource to demand in each severity degree, more insights can be drawn by a detailed investigation of the impact of different availability scenarios on teams’ workloads and missed survival opportunities. As can be seen, concurrent delays of all teams without injecting new resources, while keeping the same number of served demand locations, lead to increased exposure of the task-force due to escalated demand and less remaining time. Moreover, depending on the delayed teams’ capability mix, the summation of delayed starts of rescue operations can become higher than arrival delays. It must be addressed during response simulations before disaster strikes. Because there is a higher risk of resource arrival delays in the initial periods, which have the best survival chance.
Although the scenario simulation corresponds to a nighttime earthquake, the study of a daytime occurrence is equally important. Population distribution and density in different places (e.g., residential buildings, educational facilities, offices, or public spaces) differ during the day. Hence, the city’s risk exposure and vulnerability can significantly change depending on earthquake onset time (Alexander 1996; Freire and Aubrecht 2012; Ara 2014). Also, the daytime transportation flow can complicate route accessibility and prolong rescue operations. Given the share of the studied district in the city’s daily trips, it is important to evaluate how changes in its connectivity to other parts of the city, which lead to different availability lead times of rescue teams and travel times within rescue tours, can impact operation planning and demand fulfilment.
To this end, greater disruptions in accessibility leading to longer arrival and travel times of teams are tested. Figure 9a demonstrates that each demand location experiences delayed completion times in the presence of different accessibility prolongation situations. Location 1, with time-sensitive demand, experiences the highest impact. Since the disruptions are considered to impact all teams and travel times equally, the delay trends for the rest of the locations follow their priority status, depending on the population and availability of compatible resources. The increasing trends of total delayed completion times are shown in Fig. 9b. This analysis, coupled with survival rate vulnerability, can be used to assess the need for urgent transportation speed-ups.

Demand locations’ delayed SAR completion with longer arrival and travel times
5.2.2 Impact of different levels of uncertainty budgets
In this section, the impact of different levels of uncertainty budgets on uncertain parameters is tested. For this purpose, the impact of each uncertainty budget on population, travel time and SAR time in the robust model optimal solution is studied for three perturbation levels of 10%, 20% and 30% and at three constraint feasibility reliability levels of 99%, 90% and 80%. The reliability scores are calculated according to Bertsimas and Sim’s (2004) \( B\left( {n,\varGamma_{i} } \right) \) estimation. Additionally, the impact of concurrent variations of the above parameters in three reliability states is tested. The changes in the optimal solution of the robust model versus the deterministic model are calculated and presented in Fig. 10.

Impact of variations in uncertain parameters on the objective function at three reliability levels
Since the population parameter has a bigger scale, its perturbations result in higher increases in weighted completion times, although the changes remain at almost the same level for different reliabilities. In contrast, while the impacts of SAR and travel times are smaller in magnitude, the solution demonstrates higher sensitivity to their perturbations and immunization efforts. For both SAR and travel time uncertainty, as the reliability level grows, the robust objective function value shows higher favorability versus the deterministic solution by the increase of perturbations. That is, as the uncertainty budget increases, perturbations of these two uncertain parameters from their nominal values cause greater increases in the objective function for immunization. So any effort to secure better estimates for these two parameters can avoid the destructive effects of their perturbations on the weighted sum of completion times, and allows a lower immunization cost. Dominated by the scale of the population parameter, joint variations in uncertain parameters are similar to the population in magnitude but exhibit higher sensitivity to reliability levels due to the presence of the other two parameters.
5.2.3 Performance analysis of proposed robust SPCRRM
To test the performance of the decisions suggested by the proposed robust routing model versus the deterministic approach, additional experiments are carried out. First, for concurrent perturbations of uncertain population, SAR time and travel time at both 20% and 30%, three robust models with feasibility reliability levels of 99%, 90% and 80%, and respective uncertainty budgets are established. The outputs of the robust and deterministic models are collected and then tested versus 20 uniformly generated random realizations of the uncertain parameters from their respective 20% and 30% perturbation intervals. The outputs are compared based on their performances after inserting the proposed routing decisions in Eqs. (9) to (35). For each model, five sub-measures aiming at the evaluation of the realized objective function value and imposed infeasibilities are calculated to define total performance:
-
1.
The new SAR completion times \( {\text{Min}}\mathop \sum \nolimits_{j} p_{j}^{realized} f_{j}^{new} \) based on the proposed visit sequences.
-
2.
The infeasibilities in meeting the realized SAR time \( b_{j}^{{{\prime }realized}} \) of served demand locations versus the proposed \( b_{ij} \).
-
3.
The infeasibilities in providing uninterrupted operation in a case of collaboration in Constraint (18).
-
4.
The infeasibilities in the proposed operation start time \( s_{j}^{{\prime }} \) versus the realized possible time \( s_{j}^{{{\prime }new}} \) in Constraints (13) and (14).
-
5.
The inefficiencies from both sooner-than-necessary and later-than-possible proposed rest times, based on the assessment of realized continuous workload \( w_{ij}^{new} \) in a case of following the rest visits \( r_{ij} \) proposed by the models.
To penalize unfavorable infeasibilities, the exposed population multiplied by a penalty factor is considered and added to the minimization objective function. The measure’s mean and its range of changes for different random realizations are calculated in each model and presented in Fig. 11.

Performance of robust and deterministic approaches under uncertain parameter realizations at two perturbation levels
The results demonstrate that the robust approach outperforms the deterministic model in all cases. The deterministic model’s output varies in a wider range, which decreases its reliability even more. While the robust models maintain consistent performance in varied perturbations, the deterministic approach experiences a larger performance gap by when uncertainty increases. At both perturbation levels, the superiority of the robust model grows as the uncertainty budget and feasibility reliability increase.
The evaluation shows that for optimizing the routing of SAR resources in an uncertain disaster environment, the decisions proposed by the robust approach offer better robustness and optimality. However, the reliability level needs to be tuned based on the decision-maker’s preference.
6 Concluding remarks
This paper presents a new decision support framework with a two-stage approach for robust allocation and routing of rescue teams in an earthquake response environment. Both stages are designed to capture the operations’ effectiveness in fighting against time in the battle to extricate trapped people. The first stage seeks a fair allocation scheme for SAR resources over the partitioned affected zone, and the second stage aims at minimizing SAR completion times at demand locations, weighted by the number of trapped people in each. To capture the real-world requirements for providing a robust solution in the presence of uncertain parameters, an interval data robust optimization approach is adopted. Demand, travel time, SAR processing time, and population are considered to be uncertain parameters. The presented decision framework is capable of providing managers with appropriate insights on key points of focus and priorities for improved results before and during operations in the mitigation, preparedness, and response phases. Belonging to the broader family of resource-constrained routing problems, several real-life constraints in the rescue teams’ service tours (e.g., idling rest periods, time-dependent service durations, hierarchical skill levels, and collaborative rescue service) are reflected.
The model is applied to a numerical example inspired by an earthquake scenario in an urban district in Iran’s capital, Tehran. Comprehensive analysis is done in both stages, and the sensitivity of the solution to different levels of resource capacities, availability lead times, travel times, and budget of uncertainty for uncertain parameters are studied. Additionally, in both stages, the superiority of the proposed robust models’ performance versus the deterministic approach in keeping a near-to-optimal and feasible solution under a perturbed environment is validated.
To solve larger problems, a heuristic or meta-heuristic algorithm needs to be developed and evaluated. Moreover, incorporating path selection for each pair of nodes in SAR routing, and integrating the allocation and routing of SAR teams with medical resource planning, crowd evacuation planning, or lifeline restoration planning in multi-objective setting are other interesting avenues for future research.
Notes
Earthquakes with one or more of the following five characteristics are listed as significant: (1) caused moderate damage (approximately $1 million or more); (2) caused deaths; (3) magnitude 7.5 or greater; (4) modified Mercalli Intensity (MMI) of X or greater; and (5) generated a tsunami (NGDC/WSD).
Atlas of Tehran metropolis, provided by Tehran municipality, 2006.
Loss data are altered to maintain confidentiality.
Data are altered to maintain confidentiality.
References
Alexander D (1996) The health effects of earthquakes in the mid-1990s. Disasters 20(3):231–247
Allaoua H, Borne S, Létocart L, Calvo RW (2013) A matheuristic approach for solving a home health care problem. Electron Notes Discrete Math 41:471–478
Altay N, Green WG III (2006) OR/MS research in disaster operations management. Eur J Oper Res 175(1):475–493
Ambraseys NN, Melville CP (1977) The seismicity of Kuhistan, Iran. Geogr J 143:179–199
Amini Hosseini K, Hosseini M, Izadkhah Y, Mansouri B, Shaw T (2014) Main challenges on community-based approaches in earthquake risk reduction: case study of Tehran, Iran. Int J Disaster Risk Reduct 8:114–124
Ara S (2014) Impact of temporal population distribution on earthquake loss estimation: a case study on Sylhet, Bangladesh. Int J Disaster Risk Sci 5:296–312
Asadzadeh A, Kotter T, Zebardast E (2015) An augmented approach for measurement of disaster resilience using connective factor analysis and analytic network process (F’ANP) model. Int J Disaster Risk Reduct 14(4):504–518
Ashtari M, Hatzfeld D, Kamalian N (2005) Microseismicity in the region of Tehran. Tectonophysics 395(3–4):193–208
Attia D, Bürgy R, Desaulniers G, Soumis F (2019) A decomposition-based heuristic for large employee scheduling problems with inter-department transfers. EURO Jo Comput Optim 7(4):325–357
Balcik B, Beamon BM, Krejci CC, Muramatsu KM, Ramirez M (2010) Coordination in humanitarian relief chains: practices, challenges and opportunities. Int J Prod Econ 126(1):22–34
Baron O, Milner J, Naseraldin H (2011) Facility location: a robust optimization approach. Prod Oper Manag 20:772–785
Beamon BM, Balcik B (2008) Performance measurement in humanitarian relief chains. Management 21(1):4–25
Ben-Tal A, Nemirovski A (1998) Robust convex optimization. Math Oper Res 23:769–805
Ben-Tal A, Nemirovski A (1999) Robust solutions to uncertain programs. Oper Res Lett 25:1–13
Ben-Tal A, Nemirovski A (2000) Robust solutions of linear programming problems contaminated with uncertain data. Math Program 88:411–424
Ben-Tal A, Ghaoui LE, Nemirovski A (2009) Robust optimization. Princeton University Press, Princeton
Bertsimas D, Sim M (2004) The price of robustness. Oper Res 52(1):35–53
Bertsimas D, Thiele A (2006) A robust optimization approach to inventory theory. Oper Res 54(1):150–168
Bertsimas D, Brown DB, Caramanis C (2011) Theory and applications of robust optimization. SIAM Rev 53(3):464–501
Bodaghi B, Palaneeswaran E, Shahparvari S, Mohammadi M (2020) Probabilistic allocation and scheduling of multiple resources for emergency operations; a Victorian bushfire case study. Comput Environ Urban Syst 81:101479
Bozorgi-Amiri A, Jabalameli MS, Al-e-Hashem SM (2013) A multi-objective robust stochastic programming model for disaster relief logistics under uncertainty. OR Spectrum 35(4):905–933
Can A, Ulusoy G (2014) Multi-project scheduling with two-stage decomposition. Ann Oper Res 217(1):95–116
Cao J, Han H, Jiang YP, Wang YJ (2018) Emergency rescue vehicle dispatch planning using a hybrid algorithm. Int J Inf Technol Decis Mak 17(6):1856–1890
Chen L, Miller-Hooks E (2012) Optimal team deployment in urban search and rescue. Transp Res Part B 46:984–999
Chu X, Zhong QY (2015) Post-earthquake allocation approach of medical rescue teams. Nat Hazards 70(3):1809–1824
Cioca M, Cioca LI (2010) Decision support systems used in disaster management. In: Jao CS (ed) Decision support systems. IntechOpen, London
Clemen RT (1996) Making hard decisions: an introduction to decision analysis. Brooks/Cole Publishing Company, Pacific Grove
Dahmen S, Rekik M, Soumis F, Desaulniers G (2020) A two-stage solution approach for personalized multi-department multi-day shift scheduling. Eur J Oper Res 280(3):1051–1063
El-Ghaoui L, Lebret H (1997) Robust solutions to least-square problems to uncertain data matrices. SIAM J Matrix Anal Appl 18:1035–1064
El-Ghaoui L, Oustry F, Lebret H (1998) Robust solutions to uncertain semi-definite programs. SIAM J Optim 9:33–52
EM-DAT The Emergency events data base. Center for research on epidemiology of disasters (CRED). http://www.emdat.be/
Erbeyoglu G, Bilge U (2020) A robust disaster preparedness model for effective and fair disaster response. Eur J Oper Res 280(2):479–494
Falasca M, Zobel CW, Fetter GM (2009) An optimization model for humanitarian relief volunteer management. In: Proceedings of the 6th international ISCRAM conference, Gothenburg, Sweden, 10–13 May 2009
Fiedrich F, Gehbauer F, Rickers U (2000) Optimized resource allocation for emergency response after earthquake disasters. Saf Sci 35:41–57
Freire S, Aubrecht C (2012) Integrating population dynamics into mapping human exposure to seismic hazard. Nat Hazards Earth Syst Sci 12(11):3533–3543
French S, Geldermann J (2005) The varied contexts of environmental decision problems and their implications for decision support. Environ Sci Policy 8(4):378–391
Galindo G, Batta R (2013) Review of recent developments in OR/MS research in disaster operations management. Eur J Oper Res 230(2):201–211
Garey MR, Johnson DS (1990) Computers and intractability; a guide to the theory of NP-completeness. W.H Freeman, New York
Ghajari YE, Alesheikh AA, Modiri M, Hosnavi R, Abbasi M (2017) Spatial modelling of urban physical vulnerability to explosion hazards using GIS and fuzzy MCDA. Sustainability 9(7):1274
Goldschmidt KH, Kumar S (2016) Humanitarian operations and crisis/disaster management: a retrospective review of the literature and framework for development. Int J Disaster Risk Reduct 20:1–13
Gralla E, Goentzel J, Fine C (2014) Assessing trade-offs among multiple objectives for humanitarian aid delivery using expert preferences. Prod Oper Manag 23(6):978–989
Hartmann S, Briskorn D (2010) A survey of variants and extensions of the resource-constrained project scheduling problem. Eur J Oper Res 207(1):1–14
Hoyos MC, Morales RS, Akhavan-Tabatabaei R (2015) OR models with stochastic components in disaster operations management: a literature survey. Comput Ind Eng 82:183–197
Hu CL, Liu X, Hua YK (2016) A bi-objective robust model for emergency resource allocation under uncertainty. Int J Prod Res 54(24):7421–7438
Japan International Cooperation Agency (JICA) (2000) The study on seismic micro-zoning of the greater Tehran area in the Islamic Republic of Iran. Main Report
Laporte G (2007) What you should know about the vehicle routing problem. Naval Res Logist 54(8):811–819
Lei L, Pinedo M, Qi L, Wang S, Yang J (2015) Personnel scheduling and supplies provisioning in emergency relief operations. Ann Oper Res 235(1):487–515
Lenstra JK, Rinnooy Kan AHG (1981) Complexity of vehicle and scheduling problems. Networks 11:221–227
Liu B, Sheu JB, Zhao X, Chen Y, Zhang W (2020) Decision making on post-disaster rescue routing problems from the rescue efficiency perspective. Eur J Oper Res 286(11):321–335
Memari P, Tavakkoli-Moghaddam R, Navazi F, Jolai F (2020) Air and ground ambulance location-allocation-routing problem for designing a temporary emergency management system after a disaster. Proc Inst Mech Eng Part HJ Eng Med 234(8):812–828
Miller JL, Franz LS (1996) A binary-rounding heuristic for multi-period variable-task-duration assignment problems. Comput Oper Res 33(8):819–828
Misir M, Smet P, Vanden Berghe G (2015) An analysis of generalised heuristics for vehicle routing and personnel rostering problems. J Oper Res Soc 66(5):858–870
Mohamadi A, Yaghoubi S (2017) A bi-objective stochastic model for emergency medical services network design with backup services for disasters under disruptions: an earthquake case study. Int J Disaster Risk Reduct 23:204–217
Mohamadi A, Yaghoubi S, Pishvaee MS (2019) Fuzzy multi-objective stochastic programming model for disaster relief logistics considering telecommunication infrastructures: a case study. Oper Res Int J 19(1):59–99
Mojarab M, Mrmarian H, Zare M, Morshedi AH, Pishahan MH (2014) Modeling of the seismotectonic provinces of Iran using the self-organizing map algorithm. Comput Geosci 67:150–162
Mojtahedi M, Lan Oo B (2014) Stakeholders’ approaches to disaster risk reduction in built environment. Disaster Preve Manag 23(4):356–369
Mulvey JM, Vanderbei RJ, Zenios SA (1995) Robust optimization of large scale systems. Oper Res 43:264–281
Najafi M, Eshghi K, Dullaert W (2013) A multi-objective robust optimization model for logistics planning in the earthquake response phase. Transp Res Part E 49:217–249
NGDC/WDS National Geophysical Data Center/World Data Service: Significant Earthquake Database. National Geophysical Data Center, NOAA. https://doi.org/10.7289/v5td9v7k
Nickel S, Schröder M, Steeg J (2012) Mid-term and short-term planning support for home health care services. Eur J Oper Res 219(3):574–587
Noji EK (1997) The public health consequences of disasters. Oxford University Press, New York
OCHA (2015) The International Search and Rescue Advisory Group, INSARAG Guidelines, volume 1: policy. United Nations Office for the Coordination of Humanitarian Affairs https://www.insarag.org/images/stories/INSARAG_Guidelines_V1_Policy1.pdf
Olson RS, Olson RA (1987) Urban heavy rescue. Earthq Spectra 3:645–658
Othman SB, Zgaya H, Dotoli M, Hammadi S (2017) An agent-based decision support system for resources’ scheduling in emergency supply chains. Control Eng Pract 59:27–43
Paraskevopoulos DC, Laporte G, Repoussis PP, Tarantilis CD (2017) Resource constrained routing and scheduling: review and research prospects. Eur J Oper Res 263(3):737–754
Population survey, Statistical center of Iran (2011). http://nnt.sci.org.ir/sites/nnt/SitePages/report_90/ostani/ostani_population_report_final_permision.aspx
Quarantelli EL (1988) Disaster crisis management: a summary of research findings. J Manag Stud 25(4):373–385
Rauchecker G, Schryen G (2019) An exact branch-and-price algorithm for scheduling rescue units during disaster response. Eur J Oper Res 272(1):352–363
Rolland E, Patterson RA, Ward K, Dodin B (2010) Decision support for disaster management. Oper Manag Res 3(1–2):68–79
Sawik T (2010) An integer programming approach to scheduling in a contaminated area. Omega 38:179–191
Schiffer M, Schneider M, Walther G, Laporte G (2019) Vehicle routing and location routing with intermediate stops: a review. Transp Sci 53(2):319–343
Schmid V, Doerner KF, Laporte G (2013) Rich routing problems arising in supply chain management. Eur J Oper Res 224(3):435–448
Schryen G, Rauchecker G, Comes T (2015) Resource planning in disaster response decision support models and methodologies. Bus Inf Syst Eng 57(4):243–259
Shahparvari S, Abbasi B, Chhetri P (2017) Possibilistic scheduling routing for short-notice bush fire emergency evacuation under uncertainties: an Australian case study. Omega 72:96–117
Soyster AL (1973) Convex programming with set-inclusive constraints and applications to inexact linear programming. Oper Res 21:1154–1157
Statheropoulos M, Agapiou A, Pallis GC, Mikedi K, Karma S, Vamvakarri J, Dandoulaki M, Andritsos F, Paul Thomas CL (2015) Factors that affect rescue time in urban search and rescue (USAR) operations. Nat Hazards 75:57–69
Su Z, Zhang G, Liu Y, Yue F, Jiang J (2016) Multiple emergency resource allocation for concurrent incidents in natural disasters. Int J Disaster Risk Reduct 17:199–212
Thompson S, Altay N, Green WG III, Lapetina J (2006) Improving disaster response efforts with decision support systems. Int J Emerg Manag 3(4):250–263
Wex F, Schryen G, Feuerriegel S, Neumann D (2013) Emergency response in natural disaster management: allocation and scheduling of rescue units. Eur J Oper Res 235(3):697–708
Xiang Y, Zhuang J (2016) A medical resource allocation model for serving emergency victims with deteriorating health conditions. Ann Oper Res 236:177–196
Yalçındağ S, Matta A (2017) A decomposition approach for the home health care problem with time windows. In: Cappanera P, Li J, Matta A, Sahin E, Vandaele N, Visintin F (eds) International Conference Health Care Systems Engineering (ICHCSE), Springer Proceedings in Mathematics & Statistics, vol. 210, pp 221–232
Yalçındağ S, Cappanera P, Scutella MG, Şahin E, Matta A (2016) Pattern-based decompositions for human resource planning in home health care services. Comput Oper Res 73:12–26
Yan L, Jinsong B, Xiaofeng H, Ye J (2009) A heuristic project scheduling approach for quick response to maritime disaster rescue. Int J Project Manag 27(6):620–628
Yan S, Lin CK, Chen SY (2014) Logistical support scheduling under stochastic travel times given an emergency repair work schedule. Comput Ind Eng 67:20–35
Zhang ZH, Jiang H (2014) A robust counterpart approach to the bi-objective emergency medical service design problem. Appl Math Model 38:1033–1040
Zhang JH, Li J, Liu ZP (2012) Multiple-resource and multiple-depot emergency response problem considering secondary disasters. Expert Syst Appl 39:11066–11071
Zhang C, Liu X, Jiang YP, Fan B, Song X (2016) A two-stage resource allocation model for lifeline systems quick response with vulnerability analysis. Eur J Oper Res 250(3):855–864
Zheng YJ, Ling HF, Xue JY (2018) Disaster rescue task scheduling: an evolutionary multi-objective optimization approach. IEEE Trans Emerg Top Comput 6(2):288–300
Zokaee S, Bozorgi-Amiri A, Sadjadi SJ (2016) A robust optimization model for humanitarian relief chain design under uncertainty. Appl Math Model 40:7996–8016
Acknowledgements
The authors would like to thank the Editor-in-Chief and autonomous reviewers for the valuable comments, which greatly improved the quality of this presentation. Also, the support of the Iranian Operations Research Society is highly acknowledged by the second author, as the board member of this society.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ahmadi, G., Tavakkoli-Moghaddam, R., Baboli, A. et al. A decision support model for robust allocation and routing of search and rescue resources after earthquake: a case study. Oper Res Int J 22, 1039–1081 (2022). https://doi.org/10.1007/s12351-020-00591-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12351-020-00591-5