
Abstract
This article investigates the forced pendulum equations of variable length
where a(t), e(t) are continuous T-periodic functions, \(k \in {\mathbb {R}}\) is a constant. Under suitable assumptions on the a(t), e(t) and T, we prove the existence of T-periodic solutions to the forced pendulum equations using Mawhin’s continuation theorem. Finally, some specific examples and numerical simulations are given to illustrate the applicability of the conclusions of this paper.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In 1922 Hamel [9] used the variational method to obtain the existence of \(2\pi \)-periodic solutions of forced pendulum equations
where a, b are constants. It is worth noting that this is the first result of the existence of periodic solutions for the forced pendulum equation. Similar research methods can be extended to study the existence of T-periodic solutions of general forced pendulum equations \(y''+a \sin y=f(t),\) where \(f:{\mathbb {R}} \rightarrow {\mathbb {R}}\) is a continuous T-periodic function with \(\int _{0}^{T} f(t)\textrm{d}t=0\), see [17, 18].
If there is friction, then the forced pendulum Eq. (1.1) becomes the equations
where k, A are constants, external force e(t) is a continuous T-periodic function with \(\int _{0}^{T}e(t)\textrm{d}t=0\). When \(k \ne 0\), then variational methods are not applicable to establish the existence of periodic solutions of Eq. (1.2). Therefore, many scholars used some classical tools such as fixed point theorems in cones, topological degree theory and the upper and lower solutions methods to study the existence, multiplicity and stability of the periodic solution for the forced pendulum equations. For instance, Amster and Mariani in [1, 2] investigated the existence of periodic solutions for the forced pendulum equations in the presence of friction by shooting type argument and Lyapunov-Schmidt reduction; Cid in [4] studied the existence of periodic solutions for the \(\phi \)-laplacian pendulum equation by using continuation theorem; Mawhin and Fournier in [6] considered the existence and multiplicity of periodic solutions for the forced pendulum equation by using topological degree theory and the upper and lower solutions methods; Lomtatidze and S̆remr in [15] studied the existence and uniqueness of positive periodic solution to the forced pendulum equation by using method of lower-upper functions; Torres in [24] proved the existence of periodic solution for the forced pendulum equation with friction and a singular \(\phi \)-Laplacian operator of relativistic type by using Schauder’s fixed point theorem; Yu in [27] studied the existence or nonexistence of periodic solutions with prescribed minimal periods to the classical forced pendulum equation by using critical point theory. Some scholars have also studied the conclusion that the nonexistence of periodic solution to the forced pendulum Eq. (1.2), see [3, 21]. To know more about the forced pendulum equations, we recommend to readers Mawhin’s survey papers [19, 20]. At the same time, many scholars also pay attention to the periodic solutions of second order differential equations, see [8, 12, 16, 25].
Most of the early studies on the forced pendulum equation considered the case where the pendulum length is constant. In recent years, some scholars began to pay attention to the forced pendulum equation with periodic change of pendulum length, see [5, 22, 23, 26, 28], because this kind of equations can describe many physical phenomena, for instance, the pendulum equation of the pendulum length variation can describe particle motion on a pulsating circle under the action of gravity and motion of satellites in orbit around the earth, see [11, 13, 29]. In particular, it can describe a swing model we played as children, the authors in [21, 28] discussed the adequacy of the pendulum with periodically varying length as a swing model. Therefore, the issue concerning existence of periodic solutions for the forced pendulum equations with periodically varying of pendulum length should be interesting and be of considerable significance.
The motivation of the current article is to investigate the existence of periodic solutions of forced pendulum equations with friction and periodically varying of pendulum length
where \(k \in {\mathbb {R}}\) is a constant, a(t), e(t) are continuous T-periodic functions. It is worth noting that in Eq. (1.3), when periodic function a(t) is constant, then Eq. (1.3) reduces to Eq. (1.2), and in the study of periodic solutions of forced pendulum equations, most literatures consider the case of \(\int _0^T e(t)\textrm{d}t=0\), in this paper, we only need \(e(t)\not \equiv 0\) (see assumption (H1) in Sect. 2). Obviously, the situation we consider is more general. At the end of this paper, we give some specific examples and numerical simulations to illustrate the applicability of the conclusions obtained in this paper.
The remainder part of this paper is organized as follows. In Sect. 2, for the convenience of the readers we collect some general results, given some notations and assumptions. In Sect. 3, under suitable hypotheses, we apply the Mawhin’s continuation theorem to obtain the existence of periodic solutions for the Eq. (1.3). In Sect. 4, we apply the previous results to some examples to demonstrate the applicability of our main results.
2 Preliminaries
In this section, we first introduce some mathematical settings where we settle the problem. Then, we given some assumptions and recall some known results.
Throughout this paper, let Banach spaces \( C_{T}=\{x \in C({\mathbb {R}},{\mathbb {R}}):x(t+T)=x(t) \ for\ all\ t \in {\mathbb {R}}\} \) with the norm \(\Vert {x}\Vert ={\max \nolimits _{t\in [0,T]}}\vert {x(t)}\vert .\) For a given continuous function \(g: [0,T] \rightarrow {\mathbb {R}}\), when g(t) does not change the sign on [0, T], we denote
we clearly have \(g^->0\) and \(g^+>0\). When g(t) changes sign on [0, T], we represent
then we have \(g_*\leqslant 0\), \(g^*\geqslant 0\) and \(g_{*},g^{*}\) are not zero at the same time.
Now we give expressions of constants \(C_1\) and \(C_2\). Let
where \(R_{1}=2\arcsin (\frac{e^{+}}{a^{-}}+\epsilon )\) is a constant, here \(\epsilon >0\) is small enough such that \(\frac{e^{+}}{a^{-}}+\epsilon \leqslant \frac{\sqrt{2}}{2}\). Let
where \( R_2=\max \big \{2\arcsin (\frac{e^{*}}{a^{-}}+\epsilon ),2\arcsin (\frac{-e_*}{a^{-}}+\epsilon )\big \}\) is a constant and \(\epsilon >0\) is small enough such that \(\max \{\frac{e^{*}}{a^{-}}+\epsilon ,\frac{-e_{*}}{a^{-}}+\epsilon \}\leqslant \frac{\sqrt{2}}{2}\).
In order to study the existence of T-periodic solutions of Eq. (1.3), we list the following assumptions.
- (H1):
-
Suppose a(t) is a continuous T-periodic function and does not change the sign on [0, T], e(t) is a continuous T-periodic function with \(e(t) \not \equiv 0\).
- (H2):
-
When both functions a(t) and e(t) does not change the sign on [0, T],assume that functions a(t), e(t) satisfy \(\frac{e^{+}}{a^{-}}<\frac{\sqrt{2}}{2}\);when functions a(t) does not change the sign on [0, T] and e(t) changes sign on [0, T], assume that functions a(t), e(t)satisfy \(\max \{\frac{e^{*}}{a^{-}},\frac{-e_{*}}{a^{-}}\}<\frac{\sqrt{2}}{2}\).
- (H3):
-
Suppose period T satisfy \(0<T < C\), where \(C=\min \{C_1,C_2\}\).
For convenience, we introduce some notations and an abstract existence theorem about coincidence degree theory. For more details see [7].
Let X, Y be two Banach spaces, \(L:{\text {Dom}}L \subset X \rightarrow Y\) be a linear mapping and \(N:X \rightarrow Y\) be a continuous mapping. The mapping L is said to be a Fredholm mapping of index zero if \({\text {Im}}L\) is closed in Y and \(\dim \textrm{Ker} L={\text {codim}}{\text {Im}}L<+\infty \). If L is a Fredholm mapping of index zero, then there exist continuous projectors \( P:X \rightarrow X\) and \(Q:Y \rightarrow Y\) such that \({\text {Im}} P=\textrm{Ker} L\) and \(\textrm{Ker} Q={\text {Im}} L={\text {Im}} (I-Q)\). It follows that the restriction \(L_P\) of L to \( {\text {Dom}}L \cap \textrm{Ker} P:(I-P)X \rightarrow {\text {Im}}L\) is invertible, then we denote the inverse of \( L_P\) by \(K_P\). If \(\Omega \) is a bounded open subset of X, N is called L-compact on \({\overline{\Omega }}\) if \(QN({\overline{\Omega }})\) is bounded and \(K_P(I-Q)N:\Omega \rightarrow X\) is compact.
Lemma 2.1
(Mawhin’s Continuation Theorem) Let X and Y be two Banach spaces, L be a Fredholm mapping of index zero, \(\Omega \subset X\) is an open bounded set and N is L-compact on \({\overline{\Omega }}\). If all the following conditions hold:
- (1):
-
\(Lx \ne \lambda Nx\) for all \(x \in \partial \Omega \cap {\text {Dom}}L\), and all \(\lambda \in (0,1)\);
- (2):
-
\(QNx \ne 0\), for all \(x \in \partial {\Omega } \cap {\text {Ker}} L\);
- (3):
-
\(\deg \{{JQN,{\Omega }\cap {{\text {Ker}} L},0}\}\ne 0\), where \( J:{\text {Im}}Q \rightarrow {\text {Ker}} L\) is an isomorphism.
Then the equation \(Lx = Nx\) has at least one solution in \({\text {Dom}}L \cap {\overline{\Omega }}\).
Lemma 2.2
([10, Lemma 5.2]) Let \(x: [0,T]\rightarrow {\mathbb {R}}\) be an arbitrary absolutely continuous function with \(x(0)=x(T)\). Then the inequality
holds.
3 Main Results
In this section, we can state and prove the main results of this article.
Theorem 3.1
Suppose that assumptions (H1)–(H3) hold. Then Eq. (1.3) has at least one T-periodic solution.
Remark 3.1
Conditions (H2) and (H3) are all related to the signs of e(t) and a(t), for instance, if \(a(t)>0\), \(e(t)>0\), we suppose functions a(t), e(t) satisfy \(\frac{e^{+}}{a^{-}}<\frac{\sqrt{2}}{2}\) and take \(C=C_1\); if \(a(t)>0\), e(t) changes sign, we suppose functions a(t), e(t) satisfy \(\max \{\frac{e^{*}}{a^{-}},\frac{-e_{*}}{a^{-}}\}<\frac{\sqrt{2}}{2}\) and take \(C=C_2\), we will give the reasons in the proof of Theorem 3.1.
Proof
Let \(X=Y=C_{T}\). Define linear operator \(L:{\text {Dom}}L \subset X \rightarrow Y\) by setting
where \( {\text {Dom}}L=\{x|x \in X, x'' \in C({\mathbb {R}},{\mathbb {R}})\}. \) It is immediate to prove that \({\text {Ker}} L={\mathbb {R}}\) and \({\text {Im}}L=\{y\mid {y\in {Y},~\int _{0}^{T}y(s)\textrm{d}s=0}\}\), hence we have \( \dim {\text {Ker}} L={\text {codim}}{\text {Im}}L=1. \) It is not difficult to see that \({\text {Im}}L\) is a closed set in Y. Thus the operator L is a Fredholm operator with index zero.
Define nonlinear operator \(N:X \rightarrow Y \)
Further, we define the projectors \(P:X\rightarrow {\text {Ker}} L\) and \( Q:Y \rightarrow Y\)
Clearly, \({\text {Im}}P= {\text {Ker}} L\), \( {\text {Ker}} Q={\text {Im}}L\). Then \(K_P:{\text {Im}}L \rightarrow {\text {Dom}}L \cap {\text {Ker}} P\) can be given by
where G(t, s) is the Green’s function of
It is immediate to prove that \(K_P:{\text {Im}}L \rightarrow {\text {Dom}}L \cap {\text {Ker}} P\) is a linear completely continuous operator and \(N:X \rightarrow Y \) is continuous bounded operator, therefore N is L-compact on \({\overline{\Omega }}\) with any open bounded subset \(\Omega \subset X\).
From the assumption (H1), we know that function a(t) has two cases: \(a(t)>0\) or \(a(t)<0\), and function e(t) has three cases: \(e(t)>0\), \(e(t)<0\) or e(t) changes sign. Without loss of generality, for the function a(t), we only discuss the case of \(a(t)>0\), \(a(t)<0\) is similar. Next, we classify and discuss the three cases of function e(t).
Case 1: If \(e(t)>0\), in this case, Eq. (1.3) is equivalent to equation
where \(0<a^{-} \leqslant a(t) \leqslant a^{+} \), \(0<e^{-} \leqslant e(t) \leqslant e^{+} \).
Let
where \( R_1=2\arcsin \big (\frac{e^{+}}{a^{-}}+\epsilon \big )\) is a constant, here \(\epsilon >0\) is small enough such that \(\frac{e^{+}}{a^{-}}+\epsilon \leqslant \frac{\sqrt{2}}{2}\).
Now we prove that condition (1) of Lemma 2.1 hold. Suppose the converse: there exist \(0<\lambda <1\) and \(\forall x\in {{\partial {\Omega }_{1}}} \cap {\text {Dom}}L\) such that condition (1) of Lemma 2.1 hold, that is
Multiplying (3.3) by x and integrating from 0 to T
From (3.2) we know that for \(\forall x\in {\partial \Omega }_{1}\), there is \(\Vert {x}\Vert = R_{1}\). For \(\Vert {x}\Vert = R_{1}\), we have \(|x_{\max }-x_{\min }|\geqslant \frac{R_{1}}{2}\) or \(|x_{\max }-x_{\min }| <\frac{R_{1}}{2}\). Further, when \(\Vert {x}\Vert = R_{1}\) and \(|x_{\max }-x_{\min }|<\frac{R_{1}}{2}\), by \(\Vert {x}\Vert ={\max \limits _{t\in [0,T]}}\vert {x(t)}\vert \), we also have \(\frac{R_{1}}{2}<x\leqslant R_{1}\) or \(-R_{1}\leqslant x <-\frac{R_{1}}{2}\). Next, we will discuss these situations in categories.
When \(\frac{R_{1}}{2}<x\leqslant R_{1}\), according to \(\frac{e^{+}}{a^{-}}+\epsilon \leqslant \frac{\sqrt{2}}{2}\) we know that \(\sin R_1\geqslant \sin x>\sin \frac{R_1}{2}>0\), then integrating (3.3) from 0 to T
When \(-R_1\leqslant x <-\frac{R_1}{2}\), by \(\frac{e^+}{a^-}+\epsilon \leqslant \frac{\sqrt{2}}{2}\) we know that \(\sin (-R_1)\leqslant \sin x<\sin (-\frac{R_1}{2})<0\), integrating (3.3) from 0 to T
If \(|x_{\max }-x_{\min }|\geqslant \frac{R_{1}}{2}\), from (3.4), \(\sin R_1\geqslant \sin x\) and Lemma 2.2, we obtain
All of the above situations are contradictory to the facts, so the condition (1) of Lemma 2.1 hold.
Next we prove that condition (2) of Lemma 2.1 hold. By simple calculation, we have
That is, for \(\forall t \in [0,T]\), we get
Take \(x \in \partial {\Omega }_{1} \cap {\text {Ker}} L\), we have \(x=-R_1\) or \(x=R_1\). From (3.5) and (3.6), for \(\forall x\in \partial {\Omega }_{1} \cap {\text {Ker}} L\), we obtain
Hence condition (2) of Lemma 2.1 hold.
Now, we prove that condition (3) of Lemma 2.1 hold. We define a continuous function
Obviously, we have
By using the homotopy invariance theorem
Therefore condition (3) of Lemma 2.1 hold.
So we conclude from Lemma 2.1 that Eq. (3.1) has at least one T-periodic solution in \({{\overline{\Omega }}}_{1}.\)
Case 2: If e(t) changes sign, in this case, Eq. (1.3) is equivalent to equation
where \(0<a^{-} \leqslant a(t) \leqslant a^{+} \), \(e_{*} \leqslant e(t) \leqslant e^{*} \). Obviously, \(e_{*}\leqslant 0,e^{*}\geqslant 0\) and \(e_{*},e^{*}\) are not zero at the same time.
Let
where \(R_2=\max \big \{2\arcsin (\frac{e^{*}}{a^{-}}+\epsilon ),2\arcsin (\frac{-e_*}{a^{-}}+\epsilon )\big \}\) is a constant and \(\epsilon >0\) is small enough such that \(\max \{\frac{e^{*}}{a^{-}}+\epsilon ,\frac{-e_{*}}{a^{-}}+\epsilon \}\leqslant \frac{\sqrt{2}}{2}\).
Now we prove that condition (1) of Lemma 2.1 hold. Suppose there exist \(0<\lambda <1\) and \(\forall x\in {{\partial {\Omega }_{2}}} \cap {\text {Dom}}L\) such that condition (1) of Lemma 2.1 hold, that is
Multiplying (3.9) by x and integrating from 0 to T
By (3.8) we know that for \(\forall x\in \partial \Omega _ 2\), we have \(\Vert {x}\Vert = R_2\), at this time we have \(|x_{\max }-x_{\min }|\geqslant \frac{R_{2}}{2}\) or \(|x_{\max }-x_{\min }| <\frac{R_{2}}{2}\). If \(\Vert {x}\Vert = R_2\) and \(|x_{\max }-x_{\min }|<\frac{R_{2}}{2}\), by \(\Vert {x}\Vert ={\max \limits _{t\in [0,T]}}\vert {x(t)}\vert \), we also have \(\frac{R_{2}}{2}<x\leqslant R_{2}\) or \(-R_{2}\leqslant x <-\frac{R_{2}}{2}\). Next, we will discuss these situations in categories.
When \(\frac{R_{2}}{2}<x\leqslant R_{2}\), by \(0<\max \{\frac{e^{*}}{a^{-}}+\epsilon ,\frac{-e_*}{a^-}+\epsilon \}\leqslant \frac{\sqrt{2}}{2}\) we know that \(\sin R_2\geqslant \sin x>\sin \frac{R_2}{2}>0\), then integrating (3.9) from 0 to T
When \(-R_{2}\leqslant x <-\frac{R_{2}}{2}\), by \(0<\max \{\frac{e^{*}}{a^{-}}+\epsilon , \frac{-e_{*}}{a^{-}}+\epsilon \}\leqslant \frac{\sqrt{2}}{2}\) we know that \(\sin (-R_2)\leqslant \sin x< \sin (-\frac{R_2}{2})<0\), then integrating (3.9) from 0 to T
If \(|x_{\max }-x_{\min }|\geqslant \frac{R_{2}}{2}\) and \(e^*\geqslant |e_*|\), from (3.10), \(\sin R_2\geqslant \sin x\) and Lemma 2.2, we obtain
If \(|x_{\max }-x_{\min }|\geqslant \frac{R_{2}}{2}\) and \(e^*< |e_*|\), from (3.10), \(\sin R_2\geqslant \sin x\) and Lemma 2.2, we have
Through some simple calculations, for \(\forall t \in [0,T]\), we get
The following proof is similar to the proof of case 1, and so we omit it.
So we conclude from Lemma 2.1 that Eq. (3.7) has at least one T-periodic solution in \({{\overline{\Omega }}}_{2}\).
Case 3: If \(e(t)<0\), in this case, let \({\widetilde{e}}(t)=-e(t)\), then Eq. (1.3) is equivalent to equation
where \(0<a^{-} \leqslant a(t) \leqslant a^{+} \), \(e^{-} \leqslant {\widetilde{e}}(t) \leqslant e^{+} \).
Let
where \(R_3=R_1=2\arcsin (\frac{e^{+}}{a^{-}}+\epsilon )\) are constants, here \(\epsilon >0\) is small enough such that \(\frac{e^{+}}{a^{-}}+\epsilon \leqslant \frac{\sqrt{2}}{2}\).
The following proof is similar to the proof of case 1, and so we omit it.
So we conclude from Lemma 2.1 that Eq. (3.11) has at least one T-periodic solution in \({{\overline{\Omega }}}_{3}\).
When \(a(t)<0\) and \(e(t)>0\) the proof is the same as when \(a(t)>0\) and \(e(t)<0\); when \(a(t)<0\) and \(e(t)<0\) the proof is the same as when \(a(t)>0,\, e(t)>0\); when e(t) changes sign and \(a(t)<0\) the proof is the same as case 2.
In view of all the above discussion, we know that Eq. (1.3) has at least one T-periodic solution. This completes the proof. \(\square \)
Similar to the proof of Theorem 3.1, we can prove the existence of periodic solutions to equation
where \(k \in {\mathbb {R}}\) is a constant, a(t), e(t) are continuous T-periodic functions. Next, we give expressions of constants \(K_1\) and \(K_2\).
Let
where \(F_{1}>2\arctan \frac{e^{+}}{a^{-}}\) is a constant. Let
where \( F_{2}>\max \big \{2\arctan \frac{e^{*}}{a^{-}},2\arctan \frac{-e_*}{a^{-}}\big \}\) is a constant.
Similarly, we list the following assumption.
- (H4):
-
Suppose period T satisfy \(0<T \leqslant K\), where \(K=\min \{K_1,K_2\}\).
Corollary 3.1
Suppose that assumptions (H1) and (H4) hold. Then Eq. (3.12) has at least one T-periodic solution.
Remark 3.2
In Corollary 3.1, the interpretation of the constant K is similar to the interpretation of the constant C in Theorem 3.1.

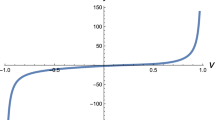
Periodic solution of Eq. (4.1)

Periodic solution of Eq. (4.2)
4 Examples
In this section, we apply the main results of this paper to several specific examples to obtain existence of periodic solutions of the equations, and verify the correctness of the conclusions of this article through numerical simulations.
Example 4.1
Consider the following forced pendulum equation
It is clear that Eq. (4.1) is the case of Eq. (1.3) when \(k=6,\,a(t)=\cos (20 \pi t)+6,\,e(t)=\cos (20 \pi t)+2\). It is easily seen that functions \(a(t)>0,\ e(t)>0\) and \(a^-=5,\,a^+=7,\,e^-=1,\,e^+=3\), then functions a(t), e(t) satisfy assumption (H1) and by simple calculation we know that functions a(t), e(t) satisfy assumption (H2). Let \(\epsilon =\frac{1}{100}\), then we have \(\frac{e^+}{a^-}+\epsilon =0.601\leqslant \frac{\sqrt{2}}{2}\). By some simple calculations, we get \(R_1^\prime =1.2976\). It is easy to verify that \(T=0.1\) satisfy assumption (H3).
Then Theorem 3.1 guarantees that Eq. (4.1) has at least one periodic solutions in \(\overline{\Omega _1^\prime }\), where \(\Omega _1^\prime :=\{x \in X \mid \Vert x\Vert <R_1^\prime \}\). At the same time, we use numerical simulation to show the existence of periodic solution of Eq. (4.1), which further illustrates the correctness of the conclusions obtained in this paper. For the convenience of observation, we draw the image of three periods (Fig. ).
Example 4.2
Consider Eq. (1.3) with \(k=2,\,a(t)=\cos 5\pi t+3,\,e(t)=\sin 5 \pi t\), that is
Obviously, function e(t) changes sign and function \(a(t)>0\), and they are all continuous T-periodic functions, we have \(a^-=2,\,a^+=4,\,e_*=-1,\,e^*=1\). It is not difficult to see that functions a(t), e(t) satisfy assumptions (H1) and (H2). Let \(\epsilon =\frac{1}{100}\), by simple calculation, we get \(R_2^\prime =1.0704\). Further, we can take the period \(T=0.4\), which is easy to verify that the period T satisfy assumption (H3).
From Theorem 3.1 we conclude that Eq. (4.2) has at least one periodic solutions in \(\overline{\Omega _2^\prime }\), where \(\Omega _2^\prime :=\{x \in X \mid \Vert x\Vert <R_2^\prime \}\). Next, we obtain the existence of periodic solutions of Eq. (4.2) by numerical simulation. For the convenience of observation, we draw the image of two periods (Fig. ).
References
Amster, P., Mariani, M.C.: Some results on the forced pendulum equation. Nonlinear Anal. 68(7), 1874–1880 (2008)
Amster, P., Mariani, M.C.: Periodic solutions of the forced pendulum equation with friction. Acad. Roy. Belg. Bull. Cl. Sci. 14, 311–320 (2003)
Belyakov, A., Seyranian, A.P., Ortega, R.: A counterexample for the damped pendulum equation. Bull. Classe des Sci. Ac. Roy. 73(1), 405–409 (1987)
Cid, J.A.: On the existence of periodic oscillations for pendulum-type equations. Adv. Nonlinear Anal. 10(1), 121–130 (2021)
Belyakov, A.O., Seyraniana, A.P., Luongo, A.: Dynamics of the pendulum with periodically varying length. Phys. D 238(16), 1589–1597 (2009)
Fournier, G., Mawhin, J.: On periodic solutions of forced pendulum-like equations. J. Differ. Equ. 60(3), 381–395 (1985)
Gaines, R.E., Mawhin, J.: Coincidence Degree and Nonlinear Differential Equations. Springer, Berlin (1977)
Han, X., Yang, H.: Existence and multiplicity of periodic solutions for a class of second-order ordinary differential equations. Monatsh. Math. 193(4), 829–843 (2020)
Hamel, G.: Ueber erzwungene Schingungen bei endlischen Amplituden. Math. Ann. 86(1), 1–13 (1922)
Hakl, R., Torres, P.J., Zamora, M.: Periodic solutions of singular second order differential equations: the repulsive case. Topol. Methods Nonlinear Anal. 39(2), 199–220 (2012)
Hatvani, L.: Existence of periodic solutions of pendulum-like ordinary and functional differential equations. Electron. J. Qual. Theory Differ. Equ. 80, 1–10 (2020)
Li, Y.: Oscillatory periodic solutions of nonlinear second order ordinary differential equations. Acta Math. Sin. Engl. Ser. 21(3), 491–496 (2005)
Liang, Z., Zhou, Z.: Stable and unstable periodic solutions of the forced pendulum of variable length. Taiwanese J. Math. 21(4), 791–806 (2017)
Liang, Z., Yao, Z.: Subharmonic oscillations of a forced pendulum with time-dependent damping. J. Fixed Point Theory Appl. 22(1), 1–10 (2020)
Lomtatidze, A., Šremr, S., Luongo, A.: On positive periodic solutions to second-order differential equations with a sub-linear non-linearity. Nonlinear Anal. Real World Appl. 57, 103200 (2021)
Ma, R., Xu, J., Han, X.: Global bifurcation of positive solutions of a second-order periodic boundary value problem with indefinite weight. Nonlinear Anal. 74(10), 3379–3385 (2011)
Mawhin, J.: Periodic oscillations of forced pendulum-like equations. Lecture Notes in Mathematics 964, 458–476 (1982)
Mawhin, J.: The forced pendulum: a paradigm for nonlinear analysis and dynamical systems. Expo. Math. 6(3), 271–287 (1988)
Mawhin, J.: Seventy-five Years of global analysis around the forced pendulum equation. Proc. Equ. Diff. 9, 115–145 (1997)
Mawhin, J.: Global results for the forced pendulum equation. Handb. Differ. Equ. 1, 533–589 (2004)
Ortega, R., Tarallo, M.: Non-continuation of the periodic oscillations of a forced pendulum in the presence of friction. Proc. Am. Math. Soc. 128(9), 2659–2665 (2000)
Seyranian, A.P.: The swing: parametric resonance. J. Appl. Math. Mech. 68(5), 757–764 (2004)
Seyranian, A.A., Seyranian, A.P.: The stability of an inverted pendulum with a vibrating suspension point. J. Appl. Math. Mech. 70(5), 754–761 (2006)
Torres, P.J.: Periodic oscillations of the relativistic pendulum with friction. Phys. Lett. A 372(42), 6386–6387 (2008)
Wang, H.: Periodic solutions to non-autonomous second-order systems. Nonlinear Anal. 71(3–4), 1271–1275 (2009)
Wright, J.A., Bartuccelli, M., Gentile, G.: Comparisons between the pendulum with varying length and the pendulum with oscillating support. J. Math. Anal. Appl. 449(2), 68–71 (2017)
Yu, J.: The minimal period problem for the classical forced pendulum equation. J. Differ. Equ. 247(2), 672–684 (2009)
Zevin, A.A., Filonenko, L.A.: Qualitative study of oscillations of a pendulum with periodically varying length and a mathematical model of swing. J. Appl. Math. Mech. 71(6), 989–1003 (2007)
Zevin, A.A., Pinsky, M.A.: Qualitative analysis of periodic oscillations of an earth satellite with magnetic attitude stabilization. Discrete Contin. Dyn. Syst. 6(2), 293–297 (2000)
Acknowledgements
The authors warmly thank the anonymous referee for his/her careful reading of the article and many pertinent remarks that lead to various improvements to this article. The authors thank the help from the editor too. This work is supported by the National Natural Science Foundation of China(No. 12161079) and Natural Science Foundation of Gansu Province(No. 20JR10RA086).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Data Availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, H., Han, X. Existence of Periodic Solutions for the Forced Pendulum Equations of Variable Length. Qual. Theory Dyn. Syst. 22, 20 (2023). https://doi.org/10.1007/s12346-022-00723-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-022-00723-6
Keywords
- Forced pendulum of variable length
- Periodic solution
- Second order differential equation
- Mawhin’s continuation theorem.