
Abstract
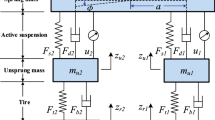
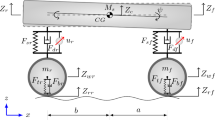
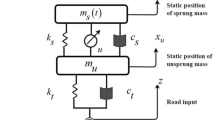
In this paper, a fault-tolerant-control (FTC) scheme with finite-time convergence characteristics for vehicle active suspension systems is proposed. A full-car model with unknown dynamics and uncertain parameters is studied. To stabilize the vertical, pitch, and roll displacements into a desired equilibrium in finite time with an uncertain mathematical model and actuator faults, a novel non-singular terminal sliding mode controller (NSTSMC) is designed to control the vertical, pitch, and roll displacements. The control scheme is absolutely continuous and robust. In addition, an improved extended state observer (IESO) with switch terms is employed to compensate for the lumped uncertainty in the suspension systems. Compared with the traditional feedback linearization control based on a linear extended state observer (LESO), this scheme can achieve higher control precision, especially for high-frequency road excitations. Finally, numerical results are shown to verify the merit and effectiveness of the proposed controller, where different types of road excitations are considered to verify the proposed approach in detail.
Article PDF
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Ahmed, N. and Chen, M. (2018). Sliding mode control for quadrotor with disturbance observer. Advances in Mechanical Engineering10, 7, 1–16.
Akbari, A. and Lohmann, B. (2010). Output feedback H∞/GH2 preview control of active vehicle suspensions: A comparison study of LQG preview. Vehicle System Dynamics: Int. J. Vehicle Mechanics and Mobility48, 12, 1475–1494.
Boker, A. M. and Khalil, H. K. (2013). Nonlinear observers comprising high-gain observers and extended Kalman filters. Automatica49, 12, 3583–3590.
Brezas, P., Smith, M. C. and Hoult, W. (2015). A clipped-optimal control algorithm for semi-active vehicle suspensions: Theory and experimental evaluation. Automatica, 53, 188–194.
Deshpande, V. S., Mohan, B., Shendge, P. D. and Phadke, S. B. (2014). Disturbance observer based sliding mode control of active suspension systems. J. Sound and Vibration333, 11, 2281–2296.
Gao, H., Lam, J. and Wang, C. (2006). Multi-objective control of vehicle active suspension systems via load-dependent controllers. J. Sound and Vibration290, 3–5, 654–675.
Gosiewski, Z. and Mystkowski, A. (2008). Robust control of active magnetic suspension: Analytical and experimental results. Mechanical Systems and Signal Processing22, 6, 1297–1303.
Guo, B. and Zhao, Z. (2011). On the convergence of an extended state observer for nonlinear systems with uncertainty. Systems & Control Letters60, 6, 420–430.
Hong, Y. (2002). Finite-time stabilization and stabilizability of a class of controllable systems. Systems & Control Letters46, 4, 231–236.
Hong, Y., Xu, Y. and Huang, J. (2002). Finite-time control for robot manipulators. Systems & Control Letters46, 4, 243–253.
Huang, B., Hsieh, C. Y., Golnaraghi, F. and Moallem, M. (2015a). Development and optimization of an energy-regenerative suspension system under stochastic road excitation. J. Sound and Vibration, 357, 16–34.
Huang, Y. B., Na, J., Wu, X., Liu, X. Q. and Guo, Y. (2015b). Adaptive control of nonlinear uncertain active suspension systems with prescribed performance. ISA Trans., 54, 145–155.
Karkoub, M. A. and Zribi, M. (2006). Active/Semi-active suspension control using magnetorheological actuators. Int. J. Systems Science37, 1, 35–44.
Li, S., Yang, J., Chen, W. H. and Chen, X. (2012). Generalized extended state observer based control for systems with mismatched uncertainties. IEEE Trans. Industrial Electronics59, 12, 4792–4802.
Lin, J. and Lian, R. J. (2011). Intelligent control of active suspension systems. IEEE Trans. Industrial Electronics58, 2, 618–628.
Liu, S., Zhou, H., Luo, X. and Xiao, J. (2016). Adaptive sliding fault tolerant control for nonlinear uncertain active suspension systems. J. Franklin Institute353, 1, 180–199.
Pan, H., Sun, W., Gao, H. and Yu, J. (2015b). Finite-time stabilization for vehicle active suspension systems with hard constraints. IEEE Trans. Intelligent Transportation Systems16, 5, 2663–2672.
Pan, H., Sun, W., Gao, H., Hayat, T. and Alsaadi, F. (2015a). Nonlinear tracking control based on extended state observer for vehicle active suspensions with performance constraints. Mechatronics, 30, 363–370.
Ran, M., Wang, Q. and Dong, C. (2016). Stabilization of a class of nonlinear systems with actuator saturation via active disturbance rejection control. Automatica, 63, 302–310.
Sande, T. P. J., Gysen, B. L. J., Besselink, I. J. M., Paulides, J. J. H., Lomonova, E. A. and Nijmeijer, H. (2013). Robust control of an electromagnetic active suspension system: Simulations and measurements. Mechatronics23, 2, 204–212.
Shao, X. and Wang, H. (2014). Sliding mode based trajectory linearization control for hypersonic reentry vehicle via extended disturbance observer. ISA Trans.53, 6, 1771–1786.
Spelta, C., Previdi, F., Savaresi, S. M., Bolzern, P., Cutini, M., Bisaglia, C. and Bertinotti, S. A. (2011). Performance analysis of semi-active suspensions with control of variable damping and stiffness. Vehicle System Dynamics: Int. J. Vehicle Mechanics and Mobility49, 1–2, 237–256.
Sun, W., Gao, H. and Kaynak, O. (2011). Finite frequency H∞ control for vehicle active suspension systems. IEEE Trans. Control Systems Technology19, 2, 416–422.
Sun, W., Gao, H. and Kaynak, O. (2013). Adaptive backstepping control for active suspension systems with hard constraints. IEEE/ASME Trans. Mechatronics18, 3, 1072–1079.
Sun, W., Pan, H., Zhang, Y. and Gao, H. J. (2014). Multi-objective control for uncertain nonlinear active suspension systems. Mechatronics24, 4, 318–327.
Unger, A., Schimmack, F., Lohmann, B. and Schwarz, R. (2013). Application of LQ-based semi-active suspension control in a vehicle. Control Engineering Practice21, 12, 1841–1850.
Wang, G., Chadli, M., Chen, H. and Zhou, Z. (2019). Event-triggered control for active vehicle suspension systems with network-induced delays. J. Franklin Institute356, 1, 147–172.
Wang, G., Chen, C. and Yu, S. (2017). Finite-time sliding mode tracking control for active suspension systems via extended super-twisting observer. Proc. Institution of Mechanical Engineers, Part D: J. Systems and Control Engineering231, 6, 459–470.
Wang, R., Jing, H., Yan, F., Karimi, H. R. and Chen, N. (2015a). Optimization and finite-frequency H∞ control of active suspensions in in-wheel motor driven electric ground vehicles. J. Franklin Institute352, 2, 468–484.
Wang, R., Jing, H., Yan, F., Karimi, H. R. and Chen, N. (2015b). Robust fault-tolerant H∞ control of active suspension systems with finite-frequency constraint. Mechanical Systems and Signal Processing, 62–63, 341–355.
Xiong, S., Wang, W., Liu, X., Chen, Z. and Wang, S. (2015). A novel extended state observer. ISA Trans., 58, 309–317.
Yagiz, N. and Hacioglu, Y. (2008). Backstepping control of a vehicle with active suspensions. Control Engineering Practice16, 12, 1457–1467.
Yao, J., Jiao, Z. and Ma, D. (2014). Adaptive robust control of DC motors with extended state observer. IEEE Trans. Industrial Electronics61, 7, 3630–3637.
Youn, I., Khan, M. A., Uddin, N., Youn, E. and Tomizuka, M. (2017). Road disturbance estimation for the optimal preview control of an active suspension systems based ontracked vehicle model. Int. J. Automotive Technology18, 2, 307–316.
Zhang, G., Cao, J. and Yu, F. (2012). Design of active and energy-regenerative controllers for DC-motor-based suspension. Mechatronics22, 8, 1124–1134.
Zhang, J., Han, Z. and Huang, J. (2013). Homogeneous feedback design of differential inclusions based on control Lyapunov functions. Communications in Nonlinear Science and Numerical Simulation18, 10, 2790–2800.
Zhang, Y., Zhang, X., Zhan, M., Guo, K., Zhao, F. and Liu, Z. (2015). Study on a novel hydraulic pumping regenerative suspension for vehicles. J. Franklin Institute352, 2, 485–499.
Zhao, Z. and Guo, B. (2015). On active disturbance rejection control for nonlinear systems using time-varying gain. European J. Control, 23, 62–70.
Zheng, Q., Dong, L., Lee, D. H. and Gao, Z. (2009). Active disturbance rejection control for MEMS gyroscopes. IEEE Trans. Control Systems Technology17, 6, 1432–1438.
Acknowledgement
The work was supported by Qianke-he platform talent [2017]5789-11. The authors would like to thank the reviewers for their valuable suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gang, W. ESO-Based Terminal Sliding Mode Control for Uncertain Full-Car Active Suspension Systems. Int.J Automot. Technol. 21, 691–702 (2020). https://doi.org/10.1007/s12239-020-0067-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12239-020-0067-y