
Abstract
Variable speed operation is often the most energy-efficient flow control method for pumping systems, as the pump performance can be adjusted to meet the process demand instead of adjusting additional hydraulic losses. Often, the process demand is a direct indicator of the rotational speed to be used. However, there are several pumping applications where the applied rotational speeds can be selected more freely. A reservoir pumping application without strict time limits is the primary example of a system having degrees of freedom for the selection of the rotational speed to be applied. In this application, the rotational speed selection is also affected by the time-varying process characteristics, which can be determined by separate measurements or preferably by a frequency converter without a need for additional instrumentation. This paper proposes a frequency converter-based method for finding the most energy-efficient rotational speeds for reservoir pumping applications, where the process static head varies during the pumping task. The proposed method relies on frequency converter-based identification of the process characteristics, which is introduced in detail. The energy efficiency of the resulting rotational speed profiles is studied both by simulations and laboratory measurements. The applicability of the studied speed control method in a common waste water pumping application is also discussed. As reservoir pumping systems are an elementary part of municipal waste water treatment, these systems are globally used and thereby have a notable energy conservation potential.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
PUMPING SYSTEMS are a common end-use application of electrical energy, globally accounting for 19 % of electrical energy consumed in motor applications and often having a significant potential for savings in their energy consumption (de Almeida et al. 2005; Ferreira et al. 2011; Waide and Brunner 2011). Variable speed operation of pumping systems is shown to be one of the possible methods to improve their energy efficiency, as the pump operation is controlled according to the actual process demand instead of adjusting additional hydraulic losses in the surrounding process (Ferreira et al. 2011). However, the applied variable speed drive, such as a frequency converter, is merely a tool to deliver the pumping system operation at a desired rotational speed: Energy-efficient operation of a pumping system also requires a sophisticated speed control algorithm into the converter.
Depending on the pumping task, a pumping system may have degrees of freedom such as the execution time of the task (Zhang et al. 2012) or an opportunity to use parallel-connected pumps with or without speed control (da Costa Bortoni et al. 2008; Viholainen et al. 2013). If there are such degrees of freedom, the required task can be completed in several ways, allowing for instance the energy efficiency optimization with a proper selection of the pump rotational speed or by using pumps of different sizes for different flow demands. For parallel-connected pumps, this has been studied since the 1980s by several pump manufacturers such as by Göran Björkander at Flygt AB (Flygt Systems Engineering 1994). As an example of recent studies, Viholainen et al. (2013) discuss how parallel-connected pumps should be operated with frequency converters in order to improve the system reliability and decrease the system specific energy consumption E s (kWh/m3) compared with the traditional control scheme for parallel pumping systems. In the case of pumping tasks, E s is often the most convenient optimization criterion for the rotational speed selection as it describes the required amount of electrical energy E to transfer a certain fluid volume V from the supply to the destination. Aside from the efficiency of the pump and drive train, E s also takes into account the effect of the surrounding process static head H st on the energy consumption requirement:
where P is the power, Q is the fluid flow rate, ρ is the fluid density, g is the acceleration due to gravity, k is the friction loss factor, η p is the pump efficiency, and η dt is the combined drive train efficiency of the motor and the frequency converter (Hovstadius 1999).
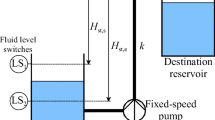
Figure 1 illustrates a two-reservoir process common in waste water treatment systems globally applied in municipalities (Jones and Sanks 2008): Two examples of waste water pumping stations of this kind are introduced by Xylem (2013). In the process, a supply reservoir is drained with a pumping system (i.e., a pump and a motor) when the fluid level reaches the high-level switch LS1, and the pumping is stopped when the fluid level reaches LS2. Hence, a constant fluid volume V is repetitively transferred from the supply to a destination reservoir by the pumping system. As the pumping lowers the fluid level in the supply reservoir, the process static head increases during the pumping task from H st,s to H st,e, thereby affecting the instantaneous system E s. Since the produced flow rate is not adjusted with control valves during normal operation, the friction loss factor k can be assumed to remain constant.

Schematic of a two-reservoir process used, e.g., in sewage systems. The pump starts to discharge the fluid from the supply reservoir to the destination reservoir when the fluid level reaches LS1. The pumping stops when the fluid level reaches LS2. During the task, the process static head changes from H st,s to H st,e
Traditionally, the pump has been equipped with a fixed speed motor, meaning that the pump is usually driven at an excessive rotational speed in terms of system energy consumption E per drained reservoir. The pumping system is also often overdimensioned for normal operation; normally, the pump has to operate only for a fraction of time (e.g., for 5 min in every 20 min). These characteristics provide a notable energy savings potential in fixed speed reservoir pumping applications, as the pumping system could be driven with the smallest possible energy consumption by optimizing the rotational speed of the pump. If the reservoir pumping application has time constraints affecting the rotational speed selection, they can be taken into account for instance by applying the variances method proposed by Lindstedt and Karvinen (2014).
Related to the use of optimum rotational speeds, Kallesøe et al. (2011) propose a method where a flow sensor is used together with a power consumption estimate to determine the energy consumption of a single reservoir drainage event at different constant rotational speeds. Thus, the optimum constant rotational speed can be determined and used. A corresponding, but sensorless, method is available in the Flygt SmartRun frequency converters, which carry out the reservoir drainage at a pre-selected constant rotational speed. Based on the resulting energy consumption, either a lower or higher constant rotational speed is selected for the next reservoir drainage event as the drained volume remains approximately constant between the drainage events. Thus, the reservoir is drained with the most energy efficient constant rotational speed (Flygt 2013). These two methods are particularly suitable for systems having a small relative change in the static head during the pumping task.
Tamminen et al. (2013) have tested a similar kind of a sensorless optimization method that is based on the continuous selection of either a lower or higher rotational speed during the pump operation and its effect on the pumping system E s. More generally related to water treatment systems, the optimization of constant-pressure pumping applications according to the pump efficiency has been studied in detail for instance by Szychta (2004a, b; 2006). In addition, several papers have been published on the energy savings by operating the pump at a reduced rotational speed by applying a frequency converter (e.g., de Almeida et al. 2005).
Nevertheless, none of these papers has taken into account the change in the process static head during the pumping task, which has a direct effect on the most energy-efficient rotational speed when H st is otherwise relatively low. As an example, a reservoir drainage application having a static head change from 5 to 10 m results in a set of optimum rotational speeds rather than a single optimum rotational speed for the pumping system. Figure 2 illustrates how this increase in the process static head affects the specific energy consumption of a pumping system as a function of rotational speed (a) and how there is always a single rotational speed at each process static head that results in the minimum specific energy consumption for the pumping system (b). Hence, it is not always possible to achieve the minimum energy consumption for the task with a single rotational speed, which has also been shown by computer simulations by dos Santos and Seleghim (2005).

Dependence of the pumping system specific energy consumption on the static head and the rotational speed in a reservoir pumping application (a). This example applies a constant drive train efficiency (η dt = 1), and thus, E s is only affected by the pump and process according to (1)–(4). With centrifugal pumps, there is always a single rotational speed at each process static head that results in the minimum specific energy consumption for the pumping system. This relationship between the process static head and the rotational speed follows now a linear trend line (b)
Another improvement to these studies is the use of a frequency converter to estimate the pump operating state and identify the surrounding process instead of having additional measurement sensors for flow rate and pressure (Ahonen et al. 2012). With these capabilities, a frequency converter is able to determine an appropriate rotational speed for the pump, and the energy efficiency of the pumping task can be optimized without separate controllers or metering.
In this paper, an energy efficiency optimizing speed control method is proposed to be used with a frequency converter to replace the traditional fixed speed reservoir pumping application. The method considers the effect of process changes on the most energy-efficient rotational speed. In addition, the method can be directly retrofitted to the existing reservoir pumping systems by installing a frequency converter to drive the motor of the pump and connecting the existing level switches to the digital inputs of the frequency converter. Thus, no additional sensors, instrumentation, or changes to the surrounding process are required.
The speed control method, which can be embedded in a modern frequency converter, applies a model-based pump operating state estimation. First, the method identifies the pumping task with the adjustable process model and generates a rotational speed profile that results in the minimum total energy consumption of the pumping task. Then, the optimum rotational speed profile is used during the task execution.
With the proposed method, the energy consumption of the pumping task is reduced in two ways. First, the possible oversizing of the pumping system is compensated for by the use of a lower rotational speed instead of the nominal motor speed. Second, the proposed method reacts to the changing static head during the pumping task by continuously selecting the most energy-efficient rotational speed. This further enhances the energy efficiency of the reservoir pumping system operation especially in systems having a relatively low static head and a considerable change in it during the task execution. With these enhancements, significant electrical energy savings can be reached, as the reservoir pumping applications are among the most common pumping tasks. In this paper, the resulting energy savings provided by the proposed control method are studied both by simulations and laboratory measurements.
The rest of the paper is organized as follows. In “Model-based estimation of the pump operating state,” the model-based estimation of the pump operating state is presented. “Identification of the process in a reservoir pumping application” focuses on the identification of the pumping process and “Determination of the optimum rotational speed for each operating state” on the determination of optimal rotational speed values. In “Evaluation of the proposed speed control method”, the proposed method is evaluated by simulations and laboratory measurements. “Applicability of the proposed speed control method to waste water pumping” concentrates on the applicability of the proposed method to a waste water pumping application. The key findings of the paper are summarized and generalized in the last section.
Model-based estimation of the pump operating state
Estimation of the centrifugal pump operating state (i.e., flow rate Q and head H) by a frequency converter is based on the converter estimates, an adjustable pump model, and possible test measurements for the pumping system. As the process identification requires information on the pump operating state during the pumping task, the frequency converter must be able to provide this information during the draining or filling of the reservoir.
In this case, the QP curve-based estimation method is applied to determine the pump operating state during the draining or filling of the reservoir. This estimation method uses the affinity law-corrected flow rate vs. shaft power curve as a model of the pump operation. The inputs to the model are the rotational speed and the shaft power estimates (n est, P est) provided by the frequency converter. The estimation procedure is as follows: First, the pump QP curve is shifted to the present rotational speed by applying the affinity laws
where the subscript 0 denotes the initial values. The present flow rate Q est corresponding to the shaft power estimate P est is then found from the shifted QP curve and the present head H est from the shifted QH curve. With the estimated flow rate, also the present E s can be calculated by (1). A graphical representation of the QP estimation method is given in Fig. 3.

Graphical illustration of the QP method for the estimation of the centrifugal pump operating state. The shaft power estimate is applied to determine the present estimates for the flow rate and head
The QP estimation method exploits the ability of a frequency converter to estimate the motor rotational speed and torque without sensors as verified by Ahonen et al. (2011). As a downside, this sensorless estimation method is only feasible with radial flow centrifugal pumps having a rising QP characteristic curve. Further, it cannot directly provide information on the amount of inflow to the reservoir, affecting its usability during excessive inflow. For this, there are several other sensorless and measurement-assisted methods that can be applied to the estimation of the centrifugal pump operational state; these have been reviewed by Tamminen et al. (2014). As a practical example, Kallesøe and Eriksen (2010) propose a model-based approach for continuous flow calculation, which also considers the calculation of inflow to the reservoir. Correspondingly, the process curve-based estimation method can be applied to the generation of specific energy consumption curves by defining the pump operating state and efficiency at each rotational speed for the known pump and process characteristic curves.
Identification of the process in a reservoir pumping application
Pumps in reservoir drainage applications are traditionally driven according to the reservoir fluid level determined with level switches (see Fig. 1 for an example). As the pumping lowers the fluid level in the supply reservoir, the process static head increases during the pumping task from H st,s to H st,e. Piping and possible flow-prevention valves usually have a constant effect on the process dynamic head coefficient k, resulting in the following surrounding process characteristics:
where H st is always between H st,s and H st,e. Thus, identification of the process characteristics H st,s, H st,e, and k during the reservoir drainage can be used to generate the required process model for the energy efficiency optimization of the pumping task.
Figure 4 introduces a two-phase process identification run, which is carried out as follows: In phase 1, the terms H st,s and k are identified. In this phase, the frequency converter drives the pump with a speed ramp ranging from zero to the constant rotational speed (e.g., n n) during which the operating state estimates (Q est,i , H est,i ) are calculated by the QP curve method and stored at the converter.

Two-phase identification run, where the pump is first started with a speed ramp to store a set of operating state estimates (Q est,1, H est,1…Q est,n, H est,n) and then driven at a constant speed. Before the pump is shut down, the operating state estimates Q est,e, H est,e are also stored for the process identification
There are two limitations on the selection of the dn/dt of the rotational speed ramp: First, the ramp has to be slow enough so that the inertia of the pumped fluid, motor, and impeller does not significantly affect the estimation accuracy. Second, the process static head should not vary significantly during the ramp, which defines the lower limit of dn/dt. If these limitations practically prevent the use of the identification run, the obtained results can be used to estimate the system E s at each rotational speed.
After the speed ramp, the operation point set is manipulated by the Simplex method to find a combination of H st,s and k that minimizes
Phase 2 of the identification run instantly follows phase 1. In the second phase, the pump is driven at a constant rotational speed until the fluid level reaches the low-level switch LS2. Before the pump is shut down, the operating state estimates Q est,e and H est,e that determine H st,e are stored to the converter. Since the dynamic head coefficient can be assumed to remain constant, H st,e can be calculated by
After the identification phase, the required process characteristics for optimization are known. To ensure the quality of the collected estimates used in the identification, the speed ramp in phase 1 can be replaced with a stepwise acceleration of the rotational speed, where a set of estimates are collected during the steady speed operation, and a median filter is applied to find the filtered operating state for each rotational speed. The determination of H st,e can also be extended to have a set of most recent operating state estimates from which Q est,e and H est,e are determined by using a median filter.
If this identification run cannot be reliably carried out for instance because of excessive inflow, the process parameters or at least the expected H st values have to be inputted to the frequency converter for correct process identification. In the latter case, the optimum rotational speed profile can be eventually determined by the continuous E s optimization method configured with the information on H st,s and H st,e and E s estimation results from the identification run (Tamminen et al. 2013).
Determination of the optimum rotational speed for each operating state
When the process characteristics H st,s, H st,e, and k are known or identified, the specific energy consumption curves illustrated in Fig. 2a can be defined for the pumping system. The curves are obtained by determining the pump operating state as a function of rotational speed for the selected process static head (e.g., H st,s) and by calculating the resulting E s with the latter form of (1). The calculation is based on the fact that the centrifugal pump always operates in the intersection of the pump and process QH characteristic curves, and the effect of rotational speed can be considered with (2) and (3).
When E s is known as a function of rotational speed for a certain H st, the related n opt can be determined by finding the rotational speed with the smallest possible E s. By repeating this procedure for a range of static heads between H st,s and H st,e, a table of optimum rotational speeds as a function of process static head can be produced for the reservoir pumping application. Table 1 provides an example for the pumping application illustrated in Fig. 2.
Application of the n opt-based control method in the frequency converter
When the optimum rotational speeds are known for the process, the energy efficiency of the pumping application can be optimized with this information. In the case of a fixed speed pump retrofitted with a frequency converter, the nominal speed of the pump and the motor (e.g., 1,450 rpm) can be replaced with a rotational speed profile that takes into account the instantaneous process static head.
As the pump operating state is continuously estimated by the converter, the instantaneous process static head can be calculated with Q est, H est, and k by applying (7). This information can then be used together with the table of optimum rotational speeds to continuously select the optimum rotational speed for the pumping system. The main benefit of this approach is the opportunity to detect unexpected changes in the reservoir draining process, as the instantaneous process static head is monitored, and it can be taken into account in the selection of the pump rotational speed.
Alternatively, a linear rotational speed profile can be generated for the reservoir draining application if the fluid volume V to be transferred is known together with the flow rates Q s and Q e at the rotational speeds n opt,s and n opt,e. As illustrated in Fig. 2b, the use of a linear speed profile is a reasonable alternative for the continuous search of n opt. If there are no unexpected changes in the process, the reservoir can be energy-efficiently drained with a linear speed profile ranging from n opt,s to n opt,e with the following dn/dt derived according to the average pump flow rate during the task execution:
As an advantage over the lookup table approach, the use of a linear speed profile provides the expected behavior for the rotational speed, and it is not affected by erroneous estimates during the pumping task; nevertheless, it cannot adapt to unexpected changes in the process without a level measurement. For instance, the fluid level may rise above the maximum allowed level in the supply reservoir as a result of an increased fluid supply. To avoid such incidents, the optimum rotational speed should be overridden with a higher one if the applied rotational speed does not decrease the fluid level in the supply reservoir or the fluid is already at its maximum allowed level.
Evaluation of the proposed speed control method
The operation of the proposed speed control method for reservoir pumping applications was first evaluated by computer simulations for a two-reservoir process having a Sulzer APP22-80 centrifugal pump with a 255-mm impeller and a 11-kW four-pole induction motor driven by a frequency converter. The nominal speed of the pump-motor combination is 1,450 rpm, and the pump operates in its best efficiency point (BEP) at this speed when the draining of the reservoir is started.
During the drainage, H st changes from 5 to 10 m, k is constant 0.0149 ms2/l2, and 3.75 m3 of fluid is transferred from the supply to the destination reservoir. With these reservoir characteristics, the optimum rotational speed profile of the pump follows the information given in Fig. 2 and Table 1, meaning that the pump should be driven at 815–1,155 rpm depending on the instantaneous H st. The average energy-saving potential should be around 39 % based on the average of the relative E s values given in Table 1. As the motor and frequency converter efficiencies were not known for all pump operating states, this analysis focuses on the pump mechanical energy consumption when the reservoir draining is carried out at different rotational speeds without time constraints.
Figure 5 illustrates the resulting energy consumptions and durations when the pump was operated at different rotational speeds starting from the nominal speed of the pump. The effect of the applied rotational speed on the resulting energy consumption is evident. Compared with the fixed speed operation at 1,450 rpm, 33 % energy savings can be reached with a constant rotational speed of 1,050 rpm if the doubled duration of a single reservoir draining event can be accepted.

Simulated energy consumptions and durations of a single reservoir draining event. The lowest possible energy consumption was achieved with the linear speed profile ranging from 815 to 1,155 rpm
Even further, energy savings can be attained with the use of an optimum rotational speed profile: Here, a linear speed profile from 815 to 1,155 rpm with a 1-rpm/s acceleration resulted in the lowest energy consumption with an additional 4.7 % unit decrease compared with the 1,050 rpm case.Footnote 1 The total energy saving by replacing the original fixed speed operation with the optimized variable speed operation is thus 37.7 % per drained reservoir, being close to the estimated average energy saving potential. The simulation results also demonstrate the adverse effects of too low rotational speed, as the rotational speed decrease below 1,050 rpm begins to increase both energy consumption and duration of the reservoir draining task.
Compensation of pump oversizing
The capability of the proposed speed control method to compensate for pump oversizing was studied with the same process and pump having now a 265-mm impeller. The oversizing of the impeller by 10 mm increases the pump flow rate production by 12 % and the head by 8 % at a constant relative operating point, meaning that the pump operates away from its BEP and with a lower efficiency during the reservoir draining event.
Figure 6 provides the simulation results for the oversized pump and a comparison of the energy consumption values with the correctly sized pump. In this case, 37 % energy savings can be reached by using a 1,025-rpm constant rotational speed instead of the original 1,450 rpm. Again, the lowest energy consumption is achieved with a linear rotational speed profile, now ranging from 790 to 1,115 rpm with the 1 rpm/s acceleration: Compared with the 1,025-rpm case, the energy consumption is further decreased by 3.9 % units with the linear speed profile. Hence, the total energy saving potential of the optimized variable speed operation is 40.9 % per drained reservoir. The simulation results also show how a decrease in the applied rotational speed also decreases the difference in the energy consumption per drained reservoir. These results verify the ability of the proposed speed control method to compensate for the negative effect of the pump oversizing on the resulting energy consumption.

Simulated energy consumptions both for the over- and correctly sized pump and the resulting difference in each case. Again, the lowest energy consumption per drained reservoir was achieved with the linear speed profile
Laboratory tests
Laboratory tests were carried out to detect the actual effect of the applied rotational speed on the pumping system energy consumption per drained reservoir. The laboratory setup consists of a Sulzer APP22-80 centrifugal pump and an 11-kW induction motor driven by a DTC frequency converter (see Fig. 7). The pump was attached to the supply reservoir from which about 1 m3 of water was drained to the destination reservoir located 5 m above the supply reservoir (i.e., H st increases from 5 to 6 m). In addition, the pump was equipped with an electromagnetic flow meter and absolute pressure transducers allowing the determination of the actual pump operating state.

Laboratory pumping system comprising supply and destination reservoirs and a variable speed-driven centrifugal pump
The identification run algorithm was implemented in a LabVIEW environment. The LabVIEW program provides remote access and operation control of the frequency converter by using a Modbus TCP/IP protocol. The program sends rotational speed reference to the frequency converter and collects the frequency converter estimates n est,i , P est,i , and Q est,I once in every 250 ms. An estimate for the pump head is calculated according to the obtained estimates with the LabVIEW program as it is not available in the frequency converter. It was noted that the values collected from the frequency converter had to be median filtered in order to have feasible estimates for the process characteristics (H st,s, H st,e, and k). Additionally, the program stores measured values of flow rate and pressure to provide reference values for the obtained estimates. During draining of the reservoir, the drive electric output power estimates were used to determine the energy consumption of a single reservoir draining event at each rotational speed. Trapezoidal integration was used to determine the energy consumption according to the obtained power estimates. A total of three test runs were performed at each rotational speed to determine the average energy consumption for each rotational speed. The algorithm was successfully tested both with the frequency converter estimates and the measured values for the pump flow rate and head.
With the actual flow rate and pressure difference sensors, the optimum linear speed profile is within 880–955 rpm with the 0.5 rpm/s acceleration based on (8). The measured average energy consumption values and durations are illustrated in Fig. 8. As expected, a decrease in the rotational speed significantly reduces the energy consumption. In this case, the replacement of the measured fixed speed operation at 1,300 rpm with the linear speed profile has decreased the energy consumption by 31 % per drained reservoir. Although the difference in energy consumptions between the 900-rpm constant speed and the linear speed profile is very small (1.4 % units) because of only a 1-m change in H st, the proposed speed control method has been able to produce the lowest possible energy consumption for this setup.

Measured energy consumptions and durations of a single reservoir draining task. Again, the lowest energy consumption per drained reservoir was achieved with the linear rotational speed profile
Applicability of the proposed speed control method to waste water pumping
The global interest in finding energy savings in pumping applications has boosted the use of variable speed control in many reservoir pumping applications that have traditionally been controlled with the on-off control for fixed speed pumps. Considering only the idea of the method, it can be stated that the proposed method is applicable to systems where the system dynamic resistance remains constant during the reservoir drainage. If the surrounding process changes between the draining events, the method is able to identify the new characteristics at the start-up and adjust the rotational speed so that the most energy-efficient operation is delivered.
However, as the proposed method uses model-based operating state estimates, the factors limiting the use of the QP curve-based estimation method apply also in this case (Ahonen et al. 2012). For instance, if the pump QP characteristic curve has a flat shape (i.e., |dP/dQ| ≈ 0), the resulting process curve estimates can lead to an erroneous rotational speed profile and even to pump operation at too low rotational speed. In such a case, the process characteristics have to be separately determined so that a correct rotational profile can be identified for the application. Further, the QP curve-based estimation method cannot directly provide information on the amount of inflow to the reservoir, affecting its usability during excessive inflow. In practice, the excessive inflow can be detected during the commissioning of the converter so that the first identification runs can be carried out at a later time.
Suitable pumping applications for the use of the proposed speed control method can be found in waste water treatment, where water is often lifted from a sump or a reservoir to a sewer located at a higher level. In these pumping applications, the fluid level in the destination sewer normally remains constant, and thus, only the fluid level in the supply reservoir affects the process static head H st.
The proposed method is feasible also in reservoir filling applications where the fluid level or pressure at the inlet (supply) section remains constant. In such cases, the low- and high-level switches required for the process identification can be located in the upper reservoir. Examples of such application types are potable water pumping with booster pumps and raw water pumping from a large inlet reservoir or delivery pipeline.
Besides the abovementioned evaluations, the energy-saving potential of the proposed speed control method was determined for a waste water pumping station located in Pietarsaari, Finland, according to the results documented by Ruuskanen (2007). In the station, waste water is transferred from an inlet reservoir to treatment facilities by using 22 kW, 1,460 rpm Sarlin S2-224 L submersible pumps. The average flow rate caused by the reservoir drainage is approximately 100 l/s resulting in 60,500 m3 of fluid transfer in a week. The annual pumped volume is approximately 3,000,000 m3. The process static head varies typically from 2 to 5 m, meaning a considerable change in it during the task execution. The amount of dynamic head in the process is between 1 and 4 m depending on the flow rate.
The pump-specific energy consumption curves of this system are illustrated in Fig. 9. When the static head is 2 m, the specific energy use of the pump is the lowest when operating at a 50 % relative rotational speed, resulting in 54 % lower specific energy consumption compared with the nominal speed.Footnote 2 When the process H st reaches 5 m, the pump should be driven at a 75 % relative speed, resulting in 22 % lower specific energy consumption than with the nominal speed. Based on the assumption that the fixed speed pump energy consumption per drained inlet reservoir is the average of these two cases, the energy savings potential is around 38 % with the use of an optimum speed profile instead of fixed speed operation at 1,460 rpm. Annually, the optimized variable speed operation could result in over 40,200 kWh savings in the pumping station energy consumption. If the process static head could be maintained at 2 m without the risk of reservoir overflow, the resulting energy saving potential with the optimum rotational speed would be 54 %, meaning annually, over 53,700 kWh of saved energy in this pumping station alone.

Specific energy consumption of the pump in a sewage pumping station. Depending on the instantaneous process static head, the optimum rotational speed is within 50–75 % of 1,460 rpm, delivering a 22–54 % E s savings potential
Conclusion
Variable speed operation of pumping systems is shown to be one of the most beneficial methods to improve their energy efficiency, as the pump operation is controlled according to the actual process demand. However, the applied variable speed drive, such as a frequency converter, is merely a tool to deliver the pumping system operation at a desired rotational speed: Energy-efficient operation of a pumping system also requires a sophisticated speed control algorithm into the converter.
In this paper, an energy efficiency-optimizing speed control method especially for reservoir pumping applications was proposed. The method can be adapted to the existing process conditions, and it can take into account the effect of a changing process static head on the optimum rotational speed of the pump.
The proposed method was studied both by simulations and laboratory measurements. According to the tests, replacing the fixed speed operation with the optimum variable speed operation can result in an over 30 % decrease in the energy consumption per drained reservoir. If there is only a small or no change in the process static head during reservoir pumping, the proposed method can in any case improve the energy efficiency of the pumping by simply optimizing the pump rotational speed of the system, thereby compensating for the possible pump oversizing. Since reservoir pumping applications are one of the most common pumping tasks, significant electrical energy savings can be globally reached with the proposed speed control method.
Notes
The same results were also achieved with the lookup table-based speed control approach, where the process static head was constantly calculated for the speed controller.
Settlement of the fluid into the piping because of too low flow velocity and other possible limitations has not been considered in this selection of the optimum rotational speed.
References
Ahonen, T., Tamminen, J., Ahola, J., & Niemelä, M. (2011). Accuracy study of frequency converter estimates used in the sensorless diagnostics of induction-motor-driven systems. Proceedings of the 14th European Conference on Power Electronics and Applications. August 30–September 2. 2011. Birmingham, UK.
Ahonen, T., Tamminen, J., Ahola, J., & Kestilä, J. (2012). Frequency-converter-based hybrid estimation method for the centrifugal pump operational state. Transactions on Industrial Electronics, 59(12), 4803–4809.
da Costa Bortoni, E., de Almeida, R. A., & Viana, A. N. C. (2008). Optimization of parallel variable-speed-driven centrifugal pumps operation. Energy Efficiency, 1(3), 167–173.
de Almeida, A. T., Ferreira, F. J. T. E., & Both, D. (2005). Technical and economical considerations in the application of variable-speed drives with electric motor systems. IEEE Transactions on Industrial Applications, 41(1), 136–144.
dos Santos, J. N., & Seleghim, P., Jr. (2005). Optimized strategies for fluid transport and reservoirs management. Revista Minerva Pesquisa & Tecnologia, 2(1), 91–98.
Ferreira, F. J. T. E., Fong, J. A. C., & de Almeida, A. T. (2011). Ecoanalysis of variable-speed drives for flow regulation in pumping systems. IEEE Transactions on Industrial Electronics, 58(6), 2117–2125.
Flygt (2013). SRC 311—SmartRun. Installation, operation and maintenance manual. Flygt. https://xapps.xyleminc.com/tpi/. Accessed 2 Jan 2014.
Flygt Systems Engineering (1994). Economical aspects of variable frequency drives in pumping stations. Flygt. http://www.xyleminc.ca/Files/1823423.pdf. Accessed 10 June 2014.
Hovstadius, G. (1999). Economical aspects of adjustable speed drives in pumping systems. Proceedings of 21st National Industrial Energy Technology Conference. May 12–13. 1999. Houston, Texas, USA.
Jones, G. M., & Sanks, R. L. (2008). Summary of trench-type wet well characteristics. In G. M. Jones (Ed.), Pumping station design (pp. 12.26–28). New York: Wiley.
Kallesøe, C. S., & Eriksen, M. (2010). Supervision of pumps and their operating conditions in sewage pumping stations. Water Practice & Technology, 5(2), 1–11.
Kallesøe, C. S., Skødt, J., & Eriksen, M. (2011). Optimal control in sewage applications. World Pumps, 2011(4), 20–23.
Lindstedt, M., & Karvinen, R. (2014). Optimal control of pump rotational speed in reservoir filling: minimum energy consumption with fixed time. Sent to Journal of Water Resources Planning and Management.
Ruuskanen, A. (2007). Optimization of energy consumption in wastewater pumping. Master’s thesis. Lappeenranta University of Technology. http://urn.fi/URN:NBN:fi-fe20071214. Accessed 2 Jan 2014.
Szychta, L. (2004a). System for optimising pump station control. World Pumps, 2004(449), 45–48.
Szychta, L. (2004b). System for optimising pump station control—part II. World Pumps, 2004(454), 32–34.
Szychta, L. (2006). Energy consumption of water pumping for selected control systems. Electrical Power Quality and Utilisation Journal, XII(1), 21–27.
Tamminen, J. K., Viholainen, J., Ahonen, T., & Tolvanen, J. (2013). Sensorless specific energy consumption of a variable-speed-driven pumping system. Proceedings of 8th International Conference on Energy Efficiency in Motor Driven Systems ‘13. October 28–30. 2013. Rio de Janeiro, Brazil.
Tamminen, J., Viholainen, J., Ahonen, T., Ahola, J., Hammo, S., & Vakkilainen, E. (2014). Comparison of model-based flow rate estimation methods in frequency-converter-driven pumps and fans. Energy Efficiency, 7(3), 493–505.
Viholainen, J., Tamminen, J., Ahonen, T., Ahola, J., Vakkilainen, E., & Soukka, R. (2013). Energy-efficient control strategy for variable speed-driven parallel pumping systems. Energy Efficiency, 6(3), 495–509.
Waide P., & Brunner, C. (2011). Energy-efficiency policy opportunities for electric motor driven systems. Working paper. International Energy Agency. http://www.iea.org/publications/freepublications/publication/EE_for_ElectricSystems.pdf. Accessed 30 Dec 2013.
Xylem. (2013). Intelligent control for flow variations. World Pumps, 2013(5), 22–23.
Zhang, H., Xia, X., & Zhang, J. (2012). Optimal sizing and operation of pumping systems to achieve energy efficiency and load shifting. Electric Power Systems Research, 86(5), 41–50.
Acknowledgments
This work was supported by the Academy of Finland and Efficient Energy Use research program of Cluster for Energy Environment Oy.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ahonen, T., Tamminen, J., Viholainen, J. et al. Energy efficiency optimizing speed control method for reservoir pumping applications. Energy Efficiency 8, 117–128 (2015). https://doi.org/10.1007/s12053-014-9282-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12053-014-9282-6