
Abstract
In this work, our goal is to find more general exact travelling wave solutions of the (1\(+\)1)- and (2\(+\)1)-dimensional nonlinear chiral Schrödinger equation with conformable derivative by using a newly developed analytical method. The governing model has a very important role in quantum mechanics, especially in the field of quantum Hall effect where chiral excitations are present. In two-dimensional electron systems, subjected to strong magnetic fields and low temperatures, the quantum Hall effect can be observed. By using the method, called the rational sine-Gordon expansion method which is a generalised form of the sine-Gordon expansion method, we found complex dark and bright solitary wave solutions. These solutions have important applications in the quantum Hall effect.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In real-world, nonlinear evolution equations (NLEEs) play significant roles because every natural phenomenon is modelled by these types of equations. Their solutions help us to better understand and analyse our Universe. Therefore, finding analytical solutions of NLEEs increase is important nowadays. Scientists have proposed many methods, such as the generalised exponential rational function method [1], the Lie symmetry analysis [2], the extended trial equation method [3], the auto-Bäcklund transformation method [4, 5], the Hirota bilinear method [6,7,8,9], the sine-Gordon expansion method [10, 11], modified \(\exp (-\Omega \left( \xi \right) )\)-expansion function method [12, 13] etc. to get exact solutions.
In this work, we study the newly developed method, that is the rational sine-Gordon expansion method (RSGEM), which is the generalised form of the well-known sine-Gordon expansion method, to obtain new types of soliton solutions of the governing equations. Solitons, also known as solitary waves, are important in theoretical physics. Solitons can be seen everywhere in natural life: in neuroscience, plasma physics, quantum field theory, optical fibres, fluid dynamics, magnetic field etc. In literature, many different types of solitons can be seen. For example, chirped, conoidal, lumps, M-shaped, tunable solitons, rogue waves, Bell waves, double breather waves [14,15,16].
Chiral solitons arise in quantum mechanics, especially in the quantum Hall effect field. The CNLSE has both bright and dark solitons which have significant applications in the quantum Hall effect. In literature, bright soliton (known as Bell-shaped soliton or non-topological soliton) solutions symbolise the singular travelling wave properties and the dark solitons (known as topological soliton or simply topological defect) arise during calculations of magnetic moment and rapidity of special relativity.
Quantum Hall effect is a general quantum mechanical statement of the classical Hall effect observed in two-dimensional structures at very low temperatures. The chiral nonlinear Schrödinger equation (CNLSE) describes the edge states of the fractional quantum Hall effect [17,18,19,20]. In 1998, Nishino et al found progressive wave solutions, bright soliton and dark soliton, of the (1\(+\)1)-dimensional nonlinear chiral Schrödinger equation [21]. The CNLSE with Bohm potential has been studied in [22,23,24,25,26,27] using various methods. The simplified extended sinh-Gordon equation expansion method is used to obtain various soliton solutions of (2\(+\)1)-dimensional CNLSE such as singular solitons and combined dark–bright solitons [28]. The sine-Gordon expansion method is proposed to get soliton solutions of the (1\(+\)1) and (2\(+\)1)-dimensional CNLSE in [29]. Both the extended direct algebraic method and extended trial equation method were used to get exact solutions of the (2\(+\)1)-dimensional CNLSE [30]. These studies have proposed different kinds of solutions including Jacobi elliptic function solutions, optical soliton solutions, dark-bright soliton solutions, hyperbolic function solutions to science.
The (1\(+\)1)-dimensional nonlinear chiral Schrödinger equation is given as [26]
where q is the complex function which depends on \(x\text { and }t\), superscript \(*\) represents complex conjugate, \(\alpha \) is the coefficient of dispersion terms and \(\beta \) is the nonlinear coupling constant.
The (2\(+\)1)-dimensional CNLSE is given as [23]
where q is the complex function which depends on \(x\text { and }t\), superscript \(*\) represents complex conjugate, \(i=\sqrt{-1}\) , \(\alpha \) is the coefficient of the dispersion terms, \({{\beta }_{1}},{{\beta }_{2}}\) are the nonlinear coupling constants. Both eqs (1) and (2) are nonlinear equations and this nonlinearity is known as the current density. We consider the (1\(+\)1)- and (2\(+\)1)-dimensional CNLSE with the sense of the conformable derivative by using the RSGEM in this framework. The conformable fractional derivative was developed by Khalil et al [31]. In recent years, the conformable fractional derivative has been more preferred to other fractional derivative definitions such as Riemann–Liouville, Caputo–Fabrizio, Caputo [32,33,34]. The paper is organised as follows: we give definition and some properties of conformable derivative in §2, description of the proposed method, the rational sine-Gordon expansion method (RSGEM) is given in §3, application of the given method to the (1\(+\)1)- and (2\(+\)1)-dimensional CNLSE is demonstrated in §4 and in §5, some conclusions are given.
2 Preliminaries on conformable derivative
DEFINITION
Suppose that \(f:\left[ 0,\infty \right) \rightarrow {\mathbb {R}}\). The conformable fractional derivative of f of order \(\alpha \) is defined as
for all \(t>0\), \(\alpha \in \left( 0,1 \right] \) [31].
Theorem
Let \({{T}_{\alpha }}\) be a fractional derivative operator with order \(\alpha \) and \(\alpha \in \left( 0,1 \right] \), f, g be \(\alpha \)-differentiable at point \(t>0.\) Then [31,32,33,34,35]
-
\({{T}_{\alpha }}\left( af+bg \right) =a{{T}_{\alpha }}\left( f \right) +b{{T}_{\alpha }}\left( g \right) ,\forall a,b\in {\mathbb {R}}.\)
-
\({{T}_{\alpha }}\left( {{t}^{p}} \right) =p{{t}^{p-\alpha }},\forall p\in {\mathbb {R}}.\)
-
\({{T}_{\alpha }}\left( fg \right) =f{{T}_{\alpha }}\left( g \right) +g{{T}_{\alpha }}\left( f \right) .\)
-
\({{T}_{\alpha }}\left( \frac{f}{g} \right) =\frac{g{{T}_{\alpha }}\left( f \right) -f{{T}_{\alpha }} \left( g \right) }{{{g}^{2}}}.\)
-
\({{T}_{\alpha }}\left( \lambda \right) =0,\) for all constant functions \(f\left( t \right) =\lambda .\)
-
If f is differentiable then \({{T}_{\alpha }}\left( f \right) \left( t \right) ={{t}^{1-\alpha }}\frac{\mathrm {d}f}{\mathrm {d}t}\left( t \right) .\)
Theorem (chain rule). Let \(h,g:\left( a,\infty \right) \rightarrow R\) be \(\alpha \)-differentiable functions, where \(0<\alpha \le 1\). Let \(k\left( t \right) =h\left( g\left( t \right) \right) \). Then \(k\left( t \right) \) is \(\alpha \)-differentiable and for all t with \(t\ne a\) and \(g\left( t \right) \ne 0\), we have [36]
If \(t=a\), we have
3 Fundamental properties of the rational sine-Gordon expansion method
In this section, we explain the rational sine-Gordon expansion method (SGEM). Firstly, we give the general facts of the well-known SGEM. Let suppose the sine-Gordon equation
where \(\varphi =\varphi (x,t)\) and m is a real constant. Considering the wave transform \(\varphi =\varphi (x,t)=\Phi (\xi ),\) \(\xi =\mu \left( x-ct \right) \) to eq. (2), it yields the nonlinear ordinary differential equation
where \(\Phi =\Phi (\xi ), \xi \) is the amplitude and c is the velocity of the travelling wave. After complete simplification, we find eq. (4) as follows:
where C is the constant of integration. Substituting \(C=0,\varpi \left( \xi \right) ={\Phi }/{2}\) and \({{a}^{2}}={{{m}^{2}}}/({{{\mu }^{2}}\left( 1-{{c}^{2}}) \right) }\) in eq. (5), we get
Setting \(a=1\) in eq. (6), we get
Solving eq. (7) by the variables separable method, we get two important properties of trigonometric functions as follows:
where p is the non-zero integral constant. Let us consider the nonlinear partial differential equation of the following form which searches the solution;
where N is a nonlinear ordinary equation (NODE) whose partial derivatives of \(\Phi \) depends on \(\xi \). In the SGEM, the solution of eq. (10) is considered in the following form:
Equation (11) can be rearranged by considering eqs (8) and (9) as follows:
We know that rational functions are more general than polynomial functions. If we consider the solution function as a rational function, we can find considerably better wave solutions than the above form. Contrary to other works in the literature, our solution functions have two auxiliary functions, viz.\({\text {sech}}\!\left( \xi \right) ,\tanh \!\left( \xi \right) \). We consider the following solution form [37]:
which is also written as
\({{A}_{i}},{{B}_{i}},{{C}_{i}},{{D}_{i}},{{A}_{0}},{{B}_{0}}\) are constants to be determined later. The values of \({{A}_{i}},{{B}_{i}},{{C}_{i}},{{D}_{i}}\) are not zero at the same time. Applying the balance principle between the highest power nonlinear term and highest derivative in NODE, the value of M is identified. Reducing the expression that corresponds to the same denominator and taking the coefficients of \({{\sin }^{i}}\left( \varpi \right) {{\cos }^{j}}\left( \varpi \right) \) to zero, we get a set of algebraic equation \({{A}_{i}},{{B}_{i}},{{C}_{i}},{{D}_{i}},{{A}_{0}},\) \({{B}_{0}},\mu \text { and }c\), the values of which are found by solving the set of algebraic equations by relevant software. In the end, we substitute these values into eq. (13) and get new travelling wave solutions to eq. (10).
4 Applications of the RSGEM
4.1 Solutions of the conformable (1\(+\)1)-dimensional CNLSE
The conformable (1\(+\)1)-dimensional chiral nonlinear Schrödinger’s equation is given as
where \(0<\mu \le 1\) is conformable derivative order, \(\alpha ,\beta \) are real constants. We shall take \(\alpha =1\) in this paper.
Let us consider the wave transform given as follows:
where p represents the soliton shape, v is the velocity, k is the soliton frequency, w is the wave number and \(\phi \) is the phase constant. Using the conformable derivative operator, we put eq. (16) into eq. (15), and we obtain imaginary and real parts of the following nonlinear ordinary differential equation:
Homogen balance principle gives \(M=1\) in eq. (17). For \(M=1\), eq. (14) turns to
Putting eq. (19) and its second-order derivative into eq. (17), we get a polynomial in powers of \({{\sin }^{i}}\!\!\left( \varpi \right) \,{{{\cos }^{j}}\!\!\left( \varpi \right) }\) functions. Collecting the coefficients of \({{\sin }^{i}}\left( \varpi \right) {{\cos }^{j}}\left( \varpi \right) \) of similar power and equating each sum to zero, gives an algebraic equation system. Inserting the system of algebraic equations produces the values of \({{A}_{1}},{{B}_{1}},{{C}_{1}},{{D}_{1}}\), \({{A}_{0}},{{B}_{0}}\) and other parameters. By substituting the values of the parameters for eq. (13), we obtain some new rational travelling wave results for eq. (1).
Case 1: When the coefficients are as follows:
we get
Case 2: For the coefficients
we get the following wave solution:
Case 3: For the values
we get
Case 4: When
we have
Case 5: For the selected coefficients
we have
Case 6: If the coefficients are selected as
we get
Case 7: For
we have
Case 8: When
the following solution is obtained:
4.2 Solutions of the conformable (2\(+\)1)-dimensional CNLSE
The conformable (2\(+\)1)-dimensional chiral nonlinear Schrödinger’s equation is given by
where \(0<\mu \le 1\) is the conformable derivative order, \(\alpha , {{\beta }_{1}}, {{\beta }_{2}}\) are real constants. Let us consider the wave transform as follows:
where v is the velocity, r is the soliton frequency, w is the wave number, \(\phi \) is the phase constant, a, b, r, s are real constants. Using conformable derivative, we put eq. (37) into eq. (36) and we obtain the imaginary and the real parts of the nonlinear differential equation as follows:
Homogen balance principle gives \(M=1\) in eq. (38). For \(M=1\), eq. (14) turns to
Putting eq. (40) and its second-order derivative into eq. (38), yields a polynomial in powers of \({{\sin }^{i}}\!\!\left( \varpi \right) {{\cos }^{j}}\!\!\left( \varpi \right) \) functions. Collecting the coefficients of \({{\sin }^{i}}\!\!\left( \varpi \right) {{\cos }^{j}}\left( \varpi \right) \) of similar power and equating each sum to zero, gives an algebraic equation system. Inserting the system of algebraic equations produces the values of \({{A}_{1}},{{B}_{1}},{{C}_{1}},{{D}_{1}}\), \({{A}_{0}},{{B}_{0}}\) and other parameters. By substituting the values of the parameters for eq. (13), we obtain some new rational travelling wave results for eq. (1).
Case 1: When
we get the following solution:
Case 2: If
we have
Case 3: When
we get
Case 4: If the coefficients are selected as
we have

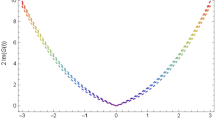
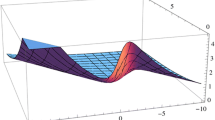
The 3D, 2D and contour simulations of the absolute value of eq. (23).

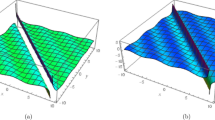
The 3D, 2D and contour simulations of the absolute value of eq. (31).

The 3D, 2D and contour simulations of the absolute value of eq. (42).

The 3D, 2D and contour simulations of the absolute value of eq. (44).

The 3D, 2D and contour simulations of the absolute value of eq. (46).

The 3D, 2D and contour simulations of the absolute value of eq. (48).
Case 5: If
we have
Case 6: If
we have
5 Conclusion
In this framework, we proposed a newly developed analytical method which is the rational sine-Gordon expansion method (RSGEM). The main advantage of this method is that it provides more general solutions that include solutions that are obtained by different methods. This method is effective in finding new solutions to governing models with powerful nonlinearity. Using the new method, we constructed new exact travelling wave solutions to the conformable (1\(+\)1)- and (2\(+\)1)-dimensional chiral nonlinear Schrödinger’s equation which describe the edge states of the fractional quantum Hall effect. We acquired explicit soliton solutions including bright, dark, singular, combined dark-bright soliton solutions of the conformable (1\(+\)1)- and (2\(+\)1)-dimensional CNLSE by using RSGEM. These types of soliton solutions (solitary waves) often have been used for understanding stable or unstable nonlinear dynamic models such as fluid dynamics, quantum physics, nuclear physics, electromagnetism etc. Chiral solitons play a vital role in the field of quantum Hall effect, where chiral excitations are known to appear. In future, it can be extended to other perturbation terms of the mentioned models by using the proposed method. The solutions to be obtained for different order values of the CNLS equation can provide novelties in the quantum Hall effect field where chiral excitations appear. Consequently, we estimate that the results found in this paper may be used to explain phenomena, especially in nuclear physics and quantum mechanics.
References
S Kumar and D Kumar Pramana – J. Phys. 95, 1 (2021)
S Kumar, M Kumar and D Kumar, Pramana – J. Phys. 94, 1 (2020)
S Tuluce Demiray and H Bulut, Numer. Methods Partial Differ. Equ. 8, 401 (2020)
D Kaya, A Yokus and U Demiroglu, Comparison of exact and numerical solutions for the Sharma–Tosso–Olver equation, in: Numerical solutions of realistic nonlinear phenomena edited by J Machado and N Özdemir and D Baleanu (Springer, Cham, 2020) Vol. 31, p. 53
E Fan, Phys. Lett. A 294, 26 (2002)
D Lu, A R Seadawy and I Ahmed, Mod. Phys. Lett. B 33, 1950363 (2019)
R Hirota, Phys. Rev. Lett. 27, 1192 (1971)
R Hirota, The direct method in soliton theory (Cambridge University Press, 2004)
Y Shen, B Tian, X Zhao, W-R Shan and Y Jiang, Pramana – J. Phys. 95 1 (2021)
C Yan, Phys. Lett. A 224, 77 (1996)
W Gao, G Yel, H M Baskonus and C Cattani, Aims Math. 5, 507 (2020)
H M Baskonus and C Cattani, Nonlinear dynamical model for DNA (Springer, 2018) p. 115
G Yel and T Aktürk, Appl. Math. Nonlinear Sci. 5, 309 (2020)
H I Abdel-Gawad, Pramana – Phys. 95, 1 (2021)
Z Rahman et al, Pramana – J. Phys. 95, 134 (2021)
Y Wang and B Gao, Pramana – J. Phys. 95, 129 (2021)
U Aglietti, L Griguolo, R Jackiw, S-Y Pi and D Seminara, Phys. Rev. Lett. 77, 4406 (1996)
R Jackiw and S-Y Pi, Phys. Rev. Lett. 64, 2969 (1990)
R Jackiw and S-Y Pi, Phys. Rev. D 44, 2524 (1991)
J-H Lee, C-K Lin and O K Pashaev, Chaos Solitons Fractals 19, 109 (2004)
A Nishino, Y Umeno and M Wadati, Chaos Solitons Fractals 9, 1063 (1998)
A Biswas, Nucl. Phys. B 806, 457 (2009)
A Biswas, Int. J. Theor. Phys. 48, 3403 (2009)
A Biswas, Int. J. Theor. Phys. 49, 79 (2010)
A Biswas and D Milovic, Phys. At. Nuclei 74, 755 (2011)
G Ebadi, A Yildirim and A Biswas, Rom. Rep. Phys. 64, 357 (2012)
M Younis, N Cheemaa, S A Mahmood and S T R Rizvi, Opt. Quantum Electron. 48, 1 (2016)
T A Sulaiman, H Bulut and H M Baskonus, Construction of various soliton solutions via the simplified extended sinh-Gordon equation expansion method (EDP Sciences, 2018) p. 1062
H Bulut, T A Sulaiman and B Demirdag, Nonlinear Dynam. 91, 1985 (2018)
N Raza and A Javid, Waves Random Complex Media 29, 496 (2019)
R Khalil, M Al Horani, A Yousef and M Sababheh, J. Comput. Appl. Math. 264, 65 (2014)
G Yel, T A Sulaiman and H M Baskonus, Mod. Phys. Lett. B 34, 2050069 (2020)
G Yel and H M Baskonus, Pramana – J. Phys. 93, 1 (2019)
K D Park, Lect. Notes Math (2010)
A Atangana, D Baleanu and A Alsaedi, Open Math. 13 (2015)
T Abdeljawad, J. Comput. Appl. Math. 279, 57 (2015)
S B Yamgoue, G R Deffo and F B Pelap, The Eur. Phys. J. Plus 134, 1 (2019)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yel, G., Bulut, H. & İlhan, E. A new analytical method to the conformable chiral nonlinear Schrödinger equation in the quantum Hall effect. Pramana - J Phys 96, 54 (2022). https://doi.org/10.1007/s12043-022-02292-4
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12043-022-02292-4
Keywords
- Rational sine-Gordon expansion method
- conformable derivative
- chiral nonlinear Schrödinger equation
- quantum Hall effect.