
Abstract
The article deals with adaptive projective synchronization between two different chaotic systems with parametric uncertainties and external disturbances. Based on Lyapunov stability theory, the projective synchronization between a pair of different chaotic systems with fully unknown parameters are derived. An adaptive control law and a parameter update rule for uncertain parameters are designed such that the chaotic response system controls the chaotic drive system. Numerical simulation results are performed to explain the effectiveness and feasibility of the techniques.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The applications of nonlinear dynamical systems have nowadays spread to a wide spectrum of disciplines including science, engineering, biology, sociology etc. Study and analysis of nonlinear dynamics have gained immense popularity during the last few decades due to its important feature of any real-time dynamical system. In nonlinear systems, a small change in a parameter can lead to sudden and dramatic changes in both the qualitative and quantitative behaviour of the system. Sometimes these may give rise to the complex behaviour called chaos. Thus, a chaotic system is a nonlinear deterministic system with unpredictable complexity. In dynamical systems, the term chaos is applied to deterministic systems that are aperiodic and that exhibit sensitive dependence on initial conditions and parameter variations, which is known as the butterfly effect [1]. The concept of chaos has been used to explain how systems that should be subject to known laws of physics may be predictable in the short term but are apparently random on a longer time-scale.
In a chaotic synchronization (a chaotic system is considered as the drive system and another identical/different system is considered as the response system), the aim is to force the response system to synchronize the drive system. Since the idea of synchronizing chaotic systems was introduced by Pecora and Carroll [2] in 1990, they showed that it is possible to synchronize chaotic systems through a simple coupling. Synchronization of chaotic dynamical systems has been intensively studied by many researchers [3–6] and has attracted a great deal of interest in various field due to its important applications in ecological system [7], physical system [8], chemical system [9], modelling brain activity, system identification, pattern recognition phenomena, secure communications [10–12] etc.
In recent years, several types of synchronization schemes, such as time delay feedback approach [13], adaptive control [14–17], active control [18], back-stepping design method [19], sliding mode control [20] so on, have been proposed and successfully applied to chaos synchronization. The concept of synchronization can be extended to generalized synchronization [21], complete synchronization [22], lag synchronization [23], phase synchronization [24], antisynchronization [25], projective synchronization [26–32], modified projective synchronization [33], hybrid synchronization [34], tracking control [35] etc.
Projective synchronization is the characterization in which the drive and the response systems can be synchronized up to a scaling factor. The proportionality between its synchronized dynamical states is used to extend binary digital communication to M-nary digital communication for achieving fast communication [26–28]. Projective synchronization was first reported by Mainieri and Rehacek [29] in partially linear systems and they declared that two identical systems could be synchronized up to a scaling factor K, which is a constant transformation between the synchronized variables of the driven and the response systems. Later, Xu et al [30] investigated the conditions of projective synchronization in partially linear systems. Ghosh [31] proposed a nonlinear observer-based projective synchronization in modulated delay time systems. In 2010, Ghosh and Bhattacharya [32] studied the projective synchronization of a hyperchaotic Newton–Leipnik system with fully unknown parameters. Again, a new synchronization method called ‘modified projective synchronization’ was proposed in [33] where the chaotic system is synchronized up to a constant scaling matrix. One of the most important applications of projective synchronization is in secure communication [31] due to the unpredictability of the scaling factor.
Adaptive control technique is used when the system parameters are unknown. In adaptive method, control law and a parameter update rule for unknown parameters are designed in such a way that the chaotic response system is controlled by the chaotic drive system. Most of the studies in synchronization involve two identical/non-identical systems under the hypotheses that all the parameters of the master and slave systems are known a priori. A controller is constructed with the known parameters and systems are free from external perturbations. But in practical situations the uncertainties like parameter mismatch and external disturbances may destroy the synchronization and even break it. So it is necessary to design an adaptive controller and parameter update law for the control and synchronization of chaotic systems consisting of unknown parameters to get rid of internal and external noises. In the presence of model uncertainties and external disturbances, an appropriate adaptive control scheme is applied to stabilize a group of chaotic systems.
Recently, many authors have studied the adaptive synchronization for the chaotic systems. In 2008, Salarieh and Shahrokhi [14] have investigated adaptive synchronization of two different chaotic systems with time-varying unknown parameters. Mossa and Noorani [15] have investigated adaptive antisynchronization of two identical and different hyperchaotic systems with uncertain parameters in 2010. In 2011, Li et al [16] proposed complete (anti-)synchronization of chaotic systems with fully uncertain parameters by adaptive control.
The influences of the uncertainties during synchronization have been considered late. In the real world applications, such as in secure communication, the receiver plants will definitely suffer from the various uncertainties including parameter perturbation or external disturbance, which will no doubt influence the accuracy of the communication. Therefore, the synchronization between chaotic systems with uncertainties and disturbances are challenging jobs for researchers. There are possibilities of destroying synchronization with the effects of those parameters. Yu et al [17] have studied antisynchronization of a novel hyperchaotic system with parameter mismatch and external disturbances. Chen et al [36] have studied disturbance observer-based robust synchronization control of uncertain chaotic systems. Jawaadaa et al [37] have done robust active sliding mode antisynchronization of hyperchaotic systems with uncertainties and external disturbances in 2012. Fu and Li [38] investigated robust adaptive antisynchronization of two different hyperchaotic systems with external uncertainties. From the literature survey, it is seen that with the development of nonlinear control theory, nowadays adaptive projective synchronization method has become very much effective to control and synchronize the chaotic and hyperchaotic systems with uncertain parameters and external disturbances. This has motivated the authors to study the adaptive projective synchronization between different pairs of chaotic systems, all having uncertain parameters and external disturbances.
In this article, a sincere attempt has been made to study projective synchronization between two non-identical chaotic systems using adaptive control method in the presence of parametric uncertainties and external disturbances. This paper is organized as follows. Section 2 contains the description of the formulation of projective synchronization of uncertain chaotic systems using adaptive control method. In §3, the system descriptions of Genesio–Tesi, Li and Lorenz systems are given. In §4 and 5, adaptive projective synchronization between uncertain Genesio–Tesi and uncertain Li chaotic systems; and uncertain Li and uncertain Lorenz chaotic systems are discussed respectively. In §6, the conclusion of the work is presented.
2 Problem formulation
Consider an uncertain chaotic system
where x(t) ∈ R n is the states of uncertain chaotic systems (1), β ∈ R m is the unknown parameter vector of the system, \(A_1\in R^{n\times n}\) is a known constant matrix with proper dimension, \(F_1\!\!:\,R^{n}\rightarrow R^{n}\) is the nonlinear part of the system, \(\Delta A_1\in R^{n\times n}\) is the parametric uncertainties of chaotic systems with |ΔA 1| ≤ δ 1, where δ 1 is a positive constant and d 1(t) is the external disturbances of chaotic systems (1) with |d 1(t)| ≤ ρ 1, where ρ 1 is a positive constant. This is considered as the master system.
Now, consider another uncertain chaotic system as the response system:
where y(t) ∈ R n, γ ∈ R m is the unknown parameter vector of the system, \(A_2\in R^{n\times n}\) is a known constant matrix with proper dimension, \(F_2\!\!:\,R^{n}\rightarrow R^{n}\) is the nonlinear part of the system, \(\Delta A_2\in R^{n\times n}\) is the parametric uncertainties of the chaotic systems with |ΔA 2| ≤ δ 2, where δ 2 is a positive constant and d 2(t) is the external disturbances of uncertain chaotic systems (2) with |d 2(t)| ≤ ρ 2, where ρ 2 is a positive constant and μ(t) ∈ R n is the control input vector of the uncertain chaotic system.
If A 1 = A 2 and F 1 = F 2, then the response system is identical with the master system. Otherwise they represent two different chaotic systems. Control function μ(t) is to be designed in such a way that the states of the master and response systems are synchronized.
Let us define the error system as
where α is a constant. The systems (1) and (2) are said to be in projective synchronization, if there exists a constant α such that \(\mathop {\lim }_{t \to\,\infty } \left\| {e} \right\| =0\). From eqs (1) and (2), we get
The parameters belonging to the drive and response systems are always unknown. Now using the adaptive control and the parameter update rule techniques, the adaptive nonlinear controller is selected as
and adaptive laws of parameters are taken as
where
k > 0 is a constant, \(\hat{\beta}\) and \(\hat{\gamma}\) are estimations of the unknown parameters β and γ respectively, which are constants.
Assume a positive Lyapunov function
where
With proper choices of the adaptive control law and parameter update rule as above for unknown parameters are designed, the time derivative of V along the solution in eq. (4) will be smaller than zero. In other words, the error vector will approach zero as time goes infinite and from Lyapunov stability theory [39]. Thus, the states of the slave system and master system are asymptotically projective synchronized. This implies that the trajectory of the response system (2) with initial condition y 0 can asymptotically approach the drive system (1) with initial condition x 0 and finally implement the projective synchronization.
Remark 1
In eq. (3), if α = 1 and α = − 1, the problem will be complete synchronization and antisynchronization, respectively.
Remark 2
If α = 0, the synchronization problem will be reduced to a chaos control problem.
3 Descriptions of the systems
3.1 Genesio–Tesi system
The Genesio–Tesi chaotic system [40] is one of paradigms of chaos since it captures many features of chaotic systems. It includes a simple square part and three simple ordinary differential equations that depend on three positive real parameters. The dynamic equation of the system is as follows:
where x, y, z are state variables and a, b, c are the positive real constants satisfying cb < a. The chaotic attractors in x–y–z space and x–y, y–z, z–x planes are depicted in figure 1 for a = 6, b = 2.92, c = 1.2 and m = 1.

Phase portraits of Genesio–Tesi chaotic attractor in (a) x–y–z space, (b) x–y plane, (c) y–z plane and (d) x–z plane.
3.2 Li system
Li system [41] derived from the Lorenz system is defined as
where x, y, z are state variables, a, b, c are the positive real constants and a = 5, b = 16, c = 1 to yield chaotic trajectory. The chaotic attractors in x–y–z space and x–y, y–z, z–x planes are depicted in figure 2.

Phase portraits of Li chaotic attractor in (a) x–y–z space, (b) x–y plane, (c) y–z plane and (d) x–z plane.
3.3 Lorenz system
The Lorenz system [42] is given by
where x, y, z are state variables, a, b, c are the positive real constants and a = 10, b = 28, c = 8/3 yield chaotic trajectory. The chaotic attractors in x–y–z space and x–y, y–z, z–x planes are depicted in figure 3.

Phase portraits of Lorenz chaotic attractor in (a) x–y–z space, (b) x–y plane, (c) y–z plane and (d) x–z plane.
4 Adaptive projective synchronization between the uncertain Genesio–Tesi and the uncertain Li chaotic systems
In this section, the projective synchronization between the uncertain Genesio–Tesi chaotic system (9) and the uncertain Li chaotic system (10) are studied. It is assumed that Genesio–Tesi system with four unknown parameters drives the Li system with three unknown parameters. Our aim is to design a control function so that the amplitudes of the trajectories of the response and the drive systems are proportional, adjusting the unknown parameters simultaneously.
The drive system is given by
where the uncertain parameter
and the disturbance term
The response system is described by
where the uncertain parameter
the disturbance term
and
are three control functions to be designed. The error dynamical system is
In order to determine the control functions to realize the projective synchronization between systems (9) and (10), we obtain
Next to find proper control functions μ i (t), i = 1, 2, 3 and parameter update rule, such that system (10) globally projective synchronizes system (9) asymptotically, i.e., \({\lim }_{t \to\,\infty } \,\left\| {e} \right\| =0\). For systems (9) and (10) in the absence of control functions μ i (t) = 0, i = 1, 2, 3, if the initial condition (x 1(0), y 1(0), z 1(0)) ≠ (x 2(0), y 2(0), z 2(0)), then the trajectories of the two systems will quickly separate each other and become irrelevant. However, when controls are applied, the two systems will approach projective synchronization for any initial condition by appropriate control functions. With this idea, we propose the following adaptive control law for system equation (10):
and parameters update rule for seven unknown parameters a, b, c, m, p, q, r as
where k i (i = 1, 2, 3) are positive real scalars and \(\hat{a}\), \(\hat{b}\), \(\hat{c}\), \(\hat{m}\), \(\hat{p}\), \(\hat{q}\), \(\hat{r}\) are estimated values of a, b, c, m, p, q, r respectively.
Equation (12) with eq. (11) yields the error dynamics as
where
Consider the following Lyapunov function:
The time derivative of V along the solution of error dynamical systems gives that
where
Since \(\dot{V}\) is negative semidefinite, then \(e_1, e_2, e_3, \hat{a}\), \(\hat{b}\), \(\hat{c}\), \(\hat{m}\), \(\hat{p}\), \(\hat{q}\), \(\hat{r} \in L_\infty\). From error system (14), we have \(\dot{e_1}, \dot{e_2}, \dot{e_3} \in L_\infty\). Since \(\dot{V(t)}=-e^TPe\) and P is a positive definite matrix, then
where λ min (P) is the minimum eigenvalue of positive-definite matrix P. Thus \(\dot{e_1}, \dot{e_2}, \dot{e_3} \in L_2\). According to Barabalat’s lemma, if e i (i = 1, 2, 3) have finite values as t→ ∞ and if \(\dot{e_i}\) are uniformly continuous then \(\dot{e_i}\rightarrow 0\) as t→ ∞. Consequence of this lemma is, if e i ∈ L 2[0, ∞ ) and \(\dot{e_i}\) are bounded then e i →0 as t→ ∞.
Therefore,
Therefore, adaptive projective synchronization is achieved between the drive system (9) and the response system (10).
4.1 Numerical simulations and results
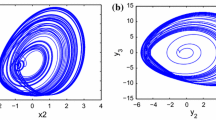
In numerical simulations, the parameters of uncertain Genesio–Tesi and Li systems are taken as (a, b, c, m) = (6, 2.92, 1.2, 1) and (p, q, r) = (5, 16, 1) respectively, such that both systems exhibit chaotic behaviour. The chaotic attractor of the uncertain chaotic Genesio–Tesi and Li systems are given in figure 4. The initial values of the drive and response systems are taken as (x 1(0), y 1(0), z 1(0)) = (3, − 4, − 3) and (x 2(0), y 2(0), z 2(0)) = ( − 3, − 4, 3) respectively. The fourth-order Range–Kutta method is used to solve the two systems of eqs (9) and (10) with time step size taken as 0.001. We assume control inputs as (k 1, k 2, k 3) = (1, 1, 1). For α = 2, projective synchronization of systems (9) and (10) via adaptive control laws (12) and parameter update rule (13) with the initial estimated parameters \((\hat{a}(0), \hat{b}(0), \hat{c}(0), \hat{m}(0))=(2, -3, 5, -1)\) and \((\hat{p}(0), \hat{q}(0), \hat{r}(0))=(-4, 10, 5)\) are shown in figures 5 and 6. Figure 5 shows that the state response and the projective synchronization error system (14) converge to zero and figure 6 shows that the estimated values \((\hat{a}(t), \hat{b}(t), \hat{c}(t), \hat{m}(t))\) and \((\hat{p}(t), \hat{q}(t), \hat{r}(t))\) of unknown parameters of systems (9) and (10) converge to (a, b, c, m) = (6, 2.92, 1.2, 1) and (p, q, r) = (5, 16, 1) respectively as t→ ∞. For α = − 2, the projective synchronization with antiphase pattern between systems (9) and (10) are shown in figure 7. For α = 1, time variation of the states are shown in figures 8a–8c and the corresponding complete synchronization error is shown in figure 8d. For α = − 1, state response and the antisynchronization error system (14) converge to zero as shown in figure 9.

Phase portraits of (a) uncertain Genesio–Tesi and (b) uncertain Li systems.


Estimated values of parameters a, b, c, m and p, q, r of (a) uncertain Genesio–Tesi and (b) uncertain Li systems with parameter update rule (13).



5 Adaptive projective synchronization between the uncertain Li and the uncertain Lorenz chaotic systems
In this section, the projective synchronization between the chaotic Li system and the chaotic Lorenz system is studied. It is considered that the Li system drives the Lorenz system with three unknown parameters. The drive and the response systems are defined as follows:
where the uncertain parameter
the disturbance term
and
where the uncertain parameter
the disturbance term
and
are three control functions to be designed. In order to determine the control functions to realize the projective synchronization between systems (18) and (19), we obtain
where
Our aim is to find proper control functions μ i (t), i = 1, 2, 3 and parameter update rule, such that system (19) globally projective synchronizes the system (18) asymptotically, i.e., \(\mathop {\lim }_{t \to\,\infty } \left\| {e} \right\| =0\). Considering the adaptive control law for system (19) as
and parameters update rule for six unknown parameters a, b, c, p, q, r as
where \(\hat{a}\), \(\hat{b}\), \(\hat{c}\), \(\hat{p}\), \(\hat{q}\), \(\hat{r}\) are estimates values of a, b, c, p, q, r respectively, and proceeding in similar way as in §4, we can easily show that the error system e i (t)→ 0 as t→ ∞ for i = 1, 2, 3, clearly exhibits the projective synchronization between systems (18) and (19).
5.1 Numerical simulations and results
In numerical simulations, the parameters of uncertain Li and Lorenz systems are taken as (a, b, c) = (5, 16, 1) and (p, q, r) = (10, 28, 8/3) respectively, such that both the systems exhibit chaotic behaviour. The initial values of the drive and response systems are taken as (x 1(0), y 1(0), z 1(0)) = (3, − 4, − 13) and (x 2(0), y 2(0), z 2(0)) = ( − 3, 4, − 3) respectively. The fourth-order Range–Kutta method is used to solve the two systems of eqs (18) and (19) with time step size as 0.001. We assume control inputs as (k 1, k 2, k 3) = (1, 1, 1). Figure 10 shows the chaotic attractor of the Lorenz system with parametric uncertainties and disturbances. For α = 2, projective synchronization of systems (18) and (19) via adaptive control laws (21) and parameter update rule (22) with the initial estimated parameters \((\hat{a}(0), \hat{b}(0), \hat{c}(0))=(2, -3, -5)\) and \((\hat{p}(0), \hat{q}(0), \hat{r}(0))=(-1, -4, 6)\) are shown in figures 11 and 12 respectively. Figures 11a–11c show that the state vectors of systems (18) and (19) tend to be proportionally synchronized and the ratio of the amplitudes of the two systems tends to a constant scaling factor and figure 11d shows that the trajectories of the error system converges to zero. Figure 12 shows that the estimated values \((\hat{a}(t), \hat{b}(t), \hat{c}(t))\) and \((\hat{p}(t), \hat{q}(t), \hat{r}(t))\) of unknown parameters of systems (18) and (19) converge to (a, b, c) = (5, 16, 1) and (p, q, r) = (10, 28, 8/3) as t→ ∞. For α = − 2, state variables of the two systems tend to be proportionally synchronized in the opposite direction and error system converges to zero which is shown in figure 13. For α = 1, time variations of the states are shown in figures 14a–14c and the corresponding complete synchronization error is shown in figure 14d. For α = − 1, the state response and the antisynchronization error system converges to zero are shown in figure 15.

Phase portrait of the uncertain Lorenz system.


Estimated values of parameters a, b, c and p, q, r of (a) Li and (b) Lorenz systems with parameter update rule (22).



6 Conclusion
The present investigation has accomplished two significant goals. Firstly, it successfully carried out the study of projective synchronization between Genesio–Tesi and Li chaotic systems, and Li and Lorenz chaotic systems with uncertainties and external disturbances using adaptive control method. Adaptive controller and parameters update law are designed properly to synchronize two different pairs of chaotic systems based on the Lyapunov stability theorem, where the state of the response and the drive systems are synchronized with a constant scaling factor. The second one is the numerical simulation, carried out using Runge–Kutta method. This shows that the method is reliable and effective for adaptive projective synchronization of nonlinear dynamical systems. This type of projective synchronization with uncertainties and external disturbances is highly applicable in secure communication.
References
K T Alligood, T Sauer and J A Yorke, Chaos: An introduction to dynamical systems (Springer-Verlag, Berlin, 1997)
L M Pecora and T L Carroll, Phys. Rev . Lett. 64, 821 (1990)
E Ott, C Grebogi and J A Yorke, Phys. Rev . Lett. 64, 1196 (1990)
G Chen and X Dong, From chaos to order: Methodologies, perspectiv es and applications (World Scientific, Singapore, 1998)
C C Fuh and P C Tung, Phys. Rev . Lett. 75, 2952 (1995)
G Chen and X Dong, IEEE Trans. Circuits Systems 40, 591 (1993)
B Blasius, A Huppert and L Stone, Nature 399, 354 (1999)
M Lakshmanan and K Murali, Chaos in nonlinear oscillators: Controlling and synchronization (World Scientific, Singapore, 1996)
S K Han, C Kerrer and Y Kuramoto, Phys. Rev . Lett. 75, 3190 (1995)
K M Cuomo and A V Oppenheim, Phys. Rev . Lett. 71, 65 (1993)
L Kocarev and U Parlitz, Phys. Rev . Lett. 74, 5028 (1995)
K Murali and M Lakshmanan, Appl. Math. Mech. 11, 1309 (2003)
J H Park and O M Kwon, Chaos, Solitons and Fractals 23, 495 (2005)
H Salarieha and M Shahrokhi, Chaos, Solitons and Fractals 37, 125 (2008)
M Mossa Al-sawalha and M S M Noorani, Commun. Nonlin. Sci. Numer. Simulat. 15, 1036 (2010)
X F Li, A C S Leung, X P Han, X J Liu and Y D Chu, Nonlin. Dyn. 63, 263 (2011)
F Yu, C Wang, Y Hu and J W Yin, Pramana – J. Phys. 79, 81 (2012)
M T Yassen, Chaos, Solitons and Fractals 23, 131 (2005)
X Wu and J Lü, Chaos, Solitons and Fractals 18, 721 (2003)
D Chen, R Zhang, X Ma and S Liu, Nonlin. Dyn. 69, 35 (2012), DOI: 10.1007/s11071-011-0244-7
X S Yang, Appl. Math. Comput. 122, 71 (2000)
H J Yu and Y Z Liu, Phys. Lett. A 314, 292 (2003)
M G Rosenblum, A S Pikovsky and J Kurths, Phys. Rev . Lett. 78, 4193 (1997)
G M Mahmoud and E E Mahmoud, Nonlin. Dyn. 61, 141 (2010)
Z L Wang and X R Shi, Nonlin. Dyn. 57, 425 (2009)
C Y Chee and D Xu, IEE Proceedings: Circuits, Dev ices and Systems 153, 357 (2006)
C Y Chee and D Xu, Chaos, Solitons and Fractals 23, 1063 (2005)
Z Li and D Xu, Chaos, Solitons and Fractals 22, 477 (2004)
R Mainieri and J Rehacek, Phys. Rev . Lett. 82, 3042 (1999)
D Xu, W L Ong and Z Li, Phys. Lett. A 305, 167 (2002)
D Ghosh, Chaos 19, 013102 (2009)
D Ghosh and S Bhattacharya, Nonlin. Dyn. 61, 11 (2010)
G H Li, Chaos, Solitons and Fractals 32, 1786 (2007)
K S Sudheer and M Sabir, Pramana – J. Phys. 73, 781 (2009)
A N Njah, Nonlin. Dyn. 61, 1 (2010)
M Chen, Q Wu and C Jiang, Nonlin. Dyn. 70, 2421 (2012)
W Jawaadaa, M S M Noorani and M M Al-sawalha, Nonlinear Analysis: Real World Applications 13, 2403 (2012)
G Fu and Z Li, Commun. Nonlin. Sci. Numer. Simulat. 16, 395 (2011)
H K Khalil, Nonlinear systems, 3rd edn. (Englewood Cliffs (NJ), Prentice-Hall, 2002)
R Genesio and A Tesi, Automatica 28, 531 (1992)
X F Li, K E Chlouverakis and D L Xu, Nonlin. Anal. 10, 2357 (2009)
E W Bai and K E Lonngren, Chaos, Solitons and Fractals 8, 51 (1997)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
SRIVASTAVA, M., AGRAWAL, S.K. & DAS, S. Adaptive projective synchronization between different chaotic systems with parametric uncertainties and external disturbances. Pramana - J Phys 81, 417–437 (2013). https://doi.org/10.1007/s12043-013-0580-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12043-013-0580-x
Keywords
- Chaos
- uncertainty
- external disturbance
- Genesio–Tesi system
- Li system
- Lorenz system
- projective synchronization
- adaptive control