
Abstract
A magnetic anchoring and guidance system uses instruments that can be inserted through a laparoscopic port site into the abdomen and then controlled through coupling with an externally held magnet. Use of these tools can improve the ergonomics of laparoscopic surgery, allowing positioning of intra-abdominal instruments that do not require a separate transabdominal trocar. Further developments of this technology have occurred in multiple surgical fields, broadening their utility and improving the instrumentation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The use of laparoscopy has revolutionized surgery, resulting in improvements in recovery time, postoperative pain, and cosmesis. Minimizing the invasiveness of surgery has created its own challenges, however. Widely used current technology still requires the placement of multiple ports through the abdominal wall, and these ports often must be spaced in such a way as to accommodate the reduced working envelope of laparoscopy. Indeed, triangulation is one of the principle tenets of laparoscopy, aiming to maintain adequate internal spacing of instruments to reduce “sword fighting” and to facilitate tissue manipulation for dissection. Even the advent of robotics has not eliminated this issue; in fact, bulky external robotic arms can sometimes even reduce working envelopes. Thus, until recently, surgeons have had to use multiple port sites to perform their operations, and each of these transabdominal punctures is associated with morbidity and risks such as herniation, bleeding, damage to internal organs, as well as more scarring and thus decreased cosmesis.
These morbidities have inspired some surgeons to work on developing even less invasive techniques through reduction of the number of transabdominal ports needed to two, one, or even none. Reducing the number of transabdominal incisions to one site, called laparoendoscopic single site surgery (LESS), often involves the use of multiple separate ports through the same incision, or increasingly, the use of one of several industry-created multiport systems that are currently available in the marketplace. These ports are inserted as a single unit but allow the passage of multiple instruments, often of varying calibers. Thus, an endoscopic camera, along with instruments such as graspers, clip appliers, endostaplers, and cauterizing devices, can be inserted together through a single incision. This technique creates its own challenges, however. Insertion of multiple instruments through a single port site does not negate the need for a degree of triangulation. In fact, this method can be plagued with instrument “clashing” as they all compete for the same trajectory toward the area or organ of interest. Some of these difficulties have been addressed by creating articulating instruments that “bow out” away from the straight trajectory, allowing a further angulation, as well as by having the instruments cross at a more proximal fulcrum to avoid collision. Although these advances make many LESS procedures feasible in experienced hands, even skilled LESS surgeons can run into problems with instrument collisions and maneuverability. Similar difficulties are amplified in natural orifice translumenal endoscopic surgery (NOTES), in which instruments are passed through an opening created in a natural orifice such as the stomach, colon, or vagina, leaving the patient with no visible scars. These technical challenges are certainly hindering these types of minimally invasive surgery from entering the mainstream.
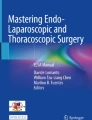
To facilitate LESS and NOTES techniques, investigators are searching for ways to get tools inside the body without having them “take up” port site space. One such method that is being explored harnesses magnetic forces to steer and operate completely insertable intracorporeal instruments via externally controlled magnets. Such technology, called magnetic anchoring and guidance systems (MAGS), can include videoscopic imagers, retractors, dissectors, and cautery devices, or even combinations thereof (Fig. 1). These devices are typically inserted through an already established entry site into the peritoneal cavity and are then coupled via magnetic attraction across the body wall to a handheld external component. By moving the external component around on the patient’s abdominal wall, the internal device can be steered to the location appropriate for surgery. Its position can be adjusted as needed to change the view if the MAGS device is a camera, to elevate the liver, for example, if it is a retractor, or even continuously, as might be needed if the instrument is a cautery hook.

Schematic representation of a magnetic anchoring and guidance system (MAGS) platform. One conventional trocar is depicted with four deployed MAGS instruments. A, deployment trocar; B, MAGS camera; C, retractors; D, robotic cauterizer; and E, external magnets
MAGS Development
The first report of MAGS was by Park et al. [1•] in 2007, in which they reported the development of an insertable endoscopic MAGS camera coupled with a light-emitting diode (LED)-wrapped trocar functioning as a light source. By using this camera along with MAGS retractors, both sling and paddle type, they were able to perform two porcine nephrectomies using only two traditional trocars. Later that year, after development of a MAGS robotic hook cautery device, the same group reported another two porcine nephrectomies, this time performed as a LESS procedure using only a single transabdominal 15-mm trocar [2]. Shortly thereafter, a multidepartmental collaboration at the same center reported four porcine NOTES cholecystectomies, helping to refine the same set of MAGS instruments [3]. During these experiments, the investigators noted and continued to improve upon several technical challenges, including fogging of the camera (which cannot be removed and cleaned as quickly as a standard laparoscopic device), insufficient lighting, and potential “clumping” of MAGS devices via intradevice attraction if more than one MAGS instrument is used [1•, 2, 3].
Recent Magnetic Advances
Recent reports demonstrate that investigation into the use of magnetic instruments to facilitate single trocar laparoscopy has expanded to other centers. There are several challenges in creating a functional MAGS camera, including lack of a commercially available miniature wireless camera device with optics on par with currently available high-definition laparoscopic imagers and difficulties in combining the camera with a bright, reliable light source. The LED-wrapped trocar used by Park et al. [1•] was notable for creating shadows onto the working space because the light source was not always positioned parallel to the separate MAGS camera. Fakhry et al. [4] reported their development of a magnet-driven, insertable camera prototype with a self-contained light source. They compared this magnetic device to a standard 30° endoscope using a modified laparoscopic trainer in a task involving finding a series of numbered labels in a maze. Laparoscopically novice surgeons were the subjects, and they found that the surgeons were able to find more labels with the magnetic camera compared to the endoscope (74.8 vs 54.7), although the magnetic trial took longer (34.9 vs 24.1 min). They experienced an average of two magnetic coupling failures per trial of the MAGS device but were able to recouple the device’s internal and external components.
Lehman et al. [5] reported on the development of a magnetically driven, fully insertable robotic platform consisting of a central body containing a stereoscopic camera/light source off of which extend two articulating arms. The arms hold a grasper and a cautery device and are controlled with a separate console containing a viewing screen and joysticks. In three nonsurvival pigs, they inserted their robotic platform into the peritoneum through a NOTES-style gastrotomy. They then performed various tasks, including abdominal exploration, bowel manipulation, and attempted cholecystectomy. The authors noted that this device was a prototype, and as such, they encountered some technical difficulties, including coupling failure and mechanical failure of the arm movements. In spite of this, the notion of a fully contained, multifunctional, magnetically anchored device is intriguing.
In addition to development of novel devices, MAGS is also being utilized in broader applications and in a greater number of surgical fields. Raman et al. [6] recently reported successful completion of two porcine transvaginal NOTES nephrectomies using a MAGS cautery device and camera. The camera was a second generation to their previously described device [1•, 2, 3] and now contained an LED light source. Both nonsurvival surgeries were able to be completed without the use of transabdominal trocars and without complications, although the authors noted that the electric wires connected to both the cauterizer and the camera were somewhat unwieldy.
Other centers are also reporting the development of magnetically anchored instruments. Dominguez et al. [7•] reported a series of 40 LESS cholecystectomies utilizing a magnetic grasper/retractor they call neodymium magnetic forceps. This device consists of an internal magnet attached to an alligator grasper that can be used to grasp the gallbladder for retraction. This fully insertable component then couples to an external magnet, and by moving the coupled pair of magnets, the gallbladder can be manipulated to facilitate gallbladder dissection. An additional 1-mm needle was used as a percutaneous dissector in 23 cases, but in all 40 cases the cholecystectomy was completed without this insertion of another trocar. They noted no significant intraoperative complications but in two patients had small gallbladder perforations, which were pinched closed with a nonmagnetic grasper, and the cases were completed without further difficulty. Also, in one case the magnets decoupled and the internal component’s location within the abdominal cavity had to be found with an intraoperative radiograph. Overall, the authors felt that use of the magnetic forceps allowed them to achieve retraction angles (and therefore triangulation) during LESS surgery that would have been difficult, if not impossible, to achieve without the insertion of another trocar.
Magnets have also been used to help facilitate a human single-incision hemicolectomy. Leroy et al. [8] recently reported a case in which they used an external, handheld magnet to position and guide the metal anvil component of a circular stapling device during a sigmoidectomy. The anvil was inserted transrectally with sigmoidoscopic guidance after mobilization of the bowel segment laparoscopically. Not only did the authors find that use of magnetic manipulation helped position the anvil to dock appropriately with the stapler, but it also permitted the colon to be maneuvered to ease the mesenteric dissection.
Perhaps the most exciting use of a MAGS camera device has now also been reported in human nephrectomy and appendectomy. Cadeddu et al. [9•] recently reported having successfully performed a LESS appendectomy in a 12-year-old boy with acute appendicitis using only a MAGS camera (with onboard LED illumination) for visualization. They found the image quality to be comparable to that of a conventional 5-mm laparoscope but found they experienced much less “sword fighting” or instrument collision with the MAGS device than typically encountered during LESS appendectomy with a standard scope. In the same paper, the authors reported a human LESS nephrectomy using a MAGS camera in a 50-year-old woman with a nonfunctional kidney secondary to chronic ureteropelvic junction obstruction. In addition to the umbilical single-access port, a 2-mm subxyphoid trocar and grasper were used to elevate the liver to reveal the kidney. The patient experienced no intraoperative complications, although the authors noted that they experienced decoupling once. The camera was smudged twice but was able to be cleaned intracorporeally with irrigation/gauze. Most promising, the MAGS camera allowed the use of standard rigid, straight laparoscopic instruments, rather than the articulating or curved ones commonly used during complex LESS operations. They felt this provided a significant improvement in ergonomics and made what is considered a challenging LESS procedure easier.
The Future of MAGS Development
Magnetically anchored technology is creating a way to minimize the number of incisions needed to operate while increasing the degree of triangulation compared to standard single-incision surgeries. However, as evidenced by the reports cited in this article, MAGS development is not without its challenges. One difficulty in developing a MAGS camera, for example, has been in finding a suitable imager with optical quality comparable to that of high-definition traditional laparoscopes that also meets the size needs of the MAGS concept. Additionally, it would be preferable for the device to be wireless, although there can be an issue in terms of power supply. These engineering hurdles are not insurmountable, but they may require the creation of a purpose-designed camera, rather than modification of commercially available surveillance cameras, which is what many current prototypes use.
Another challenge to address is the creation of magnets that are able to remain coupled across clinically significant distances (ie, the thickness of patient’s abdominal walls). Magnetic attraction forces diminish logarithmically with increasing distance, and the weight of the internal magnet and device creates an additional force opposing this attraction. Several authors quoted here noted that they experienced “decoupling” or separation of the internal and external components during their use [3–5, 7•, 9•]. This is often easily dealt with, as the abdominal wall can generally be compressed enough to push the magnets closer together and recouple them, but it could be inconvenient to do so, especially at certain critical aspects of an operation. Therefore, it would be preferable to have reliable magnetic coupling that keeps the instrument functional but without creating such a strong force that the paired magnets cannot be “slid” across the abdominal wall easily. Because the abdominal wall is compressed between the two magnets in this situation, there may be a limit to the amount of force generated between the internal and external components. In other words, the tissues of the abdominal wall could potentially be damaged if compressed too strongly. None of the authors cited here reported complications related to abdominal wall compression, but one could conceivably imagine bruising or even tissue ischemia over time if the magnets pinched too tightly. This is an area that will require further investigation. Conversely, to utilize magnetic technology in obese patients, it may be necessary to generate stronger magnets. “Permanent” magnets, such as the neodymium-based ones utilized by most investigators [1•, 3, 7•], are reliable, strong magnets that have the additional advantage of being “wireless.” However, given the logarithmic inverse relationship between magnetic force and distance, studies will need to determine the distances (and therefore, abdominal wall thicknesses) across which these tools can be used. It may prove advantageous to utilize electromagnets, which use electricity to generate an adjustable magnetic force that can often be of greater strength than that of similarly sized permanent magnets.
Conclusions
MAGS are promising tools for laparoscopic surgeons, especially in the realm of single-incision surgery. This technology can improve the ergonomics of these operations, propelling the expansion of their use into greater and greater numbers of surgical disciplines and operations. There are myriad possible tools that could harness this technological concept, creating many opportunities for further research and development.
References
Papers of particular interest, published recently, have been highlighted as: • Of importance
• Park S, Bergs RA, Eberhart R, et al.: Trocar-less instrumentation for laparoscopy: magnetic positioning of intra-abdominal camera and retractor. Ann Surg 2007, 245:379–384. This article includes the initial description of MAGS development in the literature.
Zeltser IS, Bergs R, Fernandez R, et al.: Single trocar laparoscopic nephrectomy using magnetic anchoring and guidance system in the porcine model. J Urol 2007, 178:288–291.
Scott DJ, Tang SJ, Fernandez R, et al.: Completely transvaginal NOTES cholecystectomy using magnetically anchored instruments. Surg Endosc 2007, 21:2308–2316.
Fakhry M, Gallagher B, Bello F, Hanna GB: Visual exposure using single-handed magnet-driven intra-abdominal wireless camera in minimal access surgery: is better than 30° endoscope. Surg Endosc 2009, 23:539–543.
Lehman AC, Dumpert J, Wood NA, et al.: Natural Orifice Translumenal Endoscopic Surgery with a miniature in vivo surgical robot. Surg Endosc 2009, 23:1649.
Raman JD, Bergs RA, Fernandez R, et al.: Complete transvaginal NOTES nephrectomy using magnetically anchored instrumentation. J Endourol 2009, 23:367–371.
• Dominguez G, Durand L, De Rosa J, et al.: Retraction and triangulation with neodymium magnetic forceps for single-port laparoscopic cholecystectomy. Surg Endosc 2009, 23:1660–1666. This article reports the largest series to date of human surgeries using a magnetically anchored device.
Leroy J, Cahill RA, Asakuma M, et al.: Single-access laparoscopic sigmoidectomy as definitive surgical management of prior diverticulitis in a human patient. Arch Surg 2009, 144:173–179.
• Cadeddu J, Fernandez R, Desai M, et al.: Novel magnetically guided intra-abdominal camera to facilitate laparoendoscopic single-site surgery: initial human experience. Surg Endosc 2009, 23:1894–1899. This is the first report of complex urologic surgery (nephrectomy) in a human patient.
Disclosure
Dr. Jeffrey A. Cadeddu is a patent holder and has intellectual property and a financial relationship with Ethicon Endo-Surgery, Inc.
No other potential conflicts of interest relevant to this article were reported.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Best, S.L., Cadeddu, J.A. Use of Magnetic Anchoring and Guidance Systems to Facilitate Single Trocar Laparoscopy. Curr Urol Rep 11, 29–32 (2010). https://doi.org/10.1007/s11934-009-0087-7
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11934-009-0087-7