
Abstract
Quality of Service (QoS) plays as a discriminating factor for selecting appropriate services that meet the given user’s non-functional requirements during service composition. There is a compelling need to select suitable services quickly so that the composition can meet dynamic needs. Recently, local selection approaches for QoS-based selection have been put forward toward reduced time complexity. A methodology for selecting the best available service combination for a given user requirement (workflow) with a new method of decomposing QoS constraints is proposed in this paper. The methodology consists of two phases, namely ‘Constraint Decomposition Phase’ and ‘Service Selection Phase’. In the Constraint Decomposition Phase, a unique method is proposed to decompose the given non-functional (global or workflow level) constraints into local constraints for individual tasks in the workflow. Each individual task with its local constraints forms a subproblem. In the Service Selection phase, each subproblem is resolved by finding the best available service from its respective service class using an iterative searching procedure. A prototype has been implemented, and the low computation time of the proposed method makes it well suited to dynamic composition. The proposed method of decomposing constraints is independent of number of services in a service class, and the method is applicable to any combinational workflow with AND, OR and Loop patterns. Further, a new method for computing response time of OR execution pattern which guarantees successful execution of each path in an OR pattern is a remarkable contribution of this work.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Service Oriented Architecture (SOA) promotes the development of complex business applications through service composition where more than one services are combined according to a specific pattern in order to achieve the given requirement. The business requirements are usually represented as workflow. A workflow consists of a combination of tasks. Each task represents an abstract function having input and output parameters. The tasks are implemented and published as services by different service providers. During service composition, services that implement various tasks of the workflow are discovered and combined as a composite service. Each service has a set of QoS attributes referring to non-functional attributes such as availability, latency, scalability, cost, response time and reliability. For each task, alternative services having same function but different QoS are growing in large number and the group of functionally similar services would form the ‘service class’ [1] for that task.
The process of selecting appropriate services for composition must be based on QoS characteristics of services as QoS is part of customer’s demands as in the example query Find Currency conversion (currency conversion is the functional demand) service with cost of the service \(<\)$50 (cost constraint is QoS/non-functional demand). QoS requirements of clients are based on the nature of applications, and in certain applications, the QoS demands are very crucial that the QoS demands are dominating in deciding the success of an application. This is illustrated with the following example.
Consider a client who records the weather conditions at a location during cyclone with an intention of modeling atmospheric dispersion characteristics under cyclonic conditions. Here, the client looks for a Weather Service with response time of the service strictly less than one second. Let us consider another client who looks for Weather Service with cost of the service less than $50 with an intention of simply knowing the existing weather conditions at a given location. In the case of first client, response time of the service is important; the client may pay even higher cost to get the desired response time, whereas in the case of second client cost constraint is important and this client may be satisfied with a service having poor response time of say, even one minute. In case, if the first client happens to use a service which does not have the required response time (in this example, less than one second), his purpose itself will not be met and his application will be unsuccessful. Similarly, in the case of second client if cost is higher than $50, the client may not even avail the service. Hence, services should be selected for composition according to QoS demands of clients.
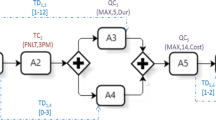
Further, in typical service composition, services from different domains will be participating in different execution patterns, such as AND, OR and sequential, to achieve a given requirement. For example, consider a typical workflow of Travel Plan given in Fig. 1. In Fig. 1, ‘AS’ denotes AND Split, ‘AJ’ denotes AND Join, ‘OS’ denotes OR Split and ‘OJ’ denotes OR Join. The given Travel Plan workflow consists of 10 tasks, namely \(t_{1},t_{2},t_{3},t_{4},t_{5},t_{6},t_{7},t_{8},t_{9}\) and \(t_{10}\) which belong to different organizations, namely Flight, Train, Hotel, Cab and Weather. The tasks are combined in different patterns, such as AND, OR and sequential. For each task, several services having similar functionality but varying QoS characteristics would form its service class. For example, services, namely \(s_{1}^{1}, s_{1}^{2}, s_{1}^{3},{\ldots }s_1^{n_1 }\) are available to implement \(t_{1}\). Services, namely \(s_{2}^{1}, s_{2}^{2}, s_{2}^{3},{\ldots }s_2^{n_2}\) are available to implement \(t_{2}\). Similarly, for each task in Fig. 1, several functionally similar services with varying QoS characteristics are available to implement that task. Despite the complexity of workflow, the runtime performance of service composition is crucial for distributed applications and applications having online customers [16, 29].

A typical workflow of travel plan
Hence, in this real scenario of various tasks from different domains, with each task having several functionally similar services, the problem of service selection is to find appropriate service combination which best satisfies the clients according to their QoS requirements within relatively short time interval as expected by clients.
To figure out service selection methods, there are two major categories, namely global and local [30]. Global approach performs service selection at composite service level. In this approach, one service from each service class is selected to form a composite service. Then, the values of QoS attributes of composite service are computed and tested for fulfillment against user’s QoS constraints. The possible number of service combinations to be searched to find an appropriate composition of ‘\(n\)’ service classes with ‘\(l\)’ number of services in each service class is \(l^{n}\).
In the given example scenario, to illustrate how the number of combinations and time taken for finding optimal solution using global approach increase with respect to number of services, the number of services per task is increased from 1 to 13. The number of service combinations and time taken for selecting services for different number of services are given in Table 1.
From Table 1, the number of combinations is found to increase exponentially with number of services. Hence, the time taken for finding suitable service combination also increases exponentially. This illustrates how global approaches such as Linear Programming (LP) or Mixed Integer Linear Programming (MILP) [6, 7, 17, 30], heuristics [5, 29] become impractical when number of services grows. Though the other methods such as genetic algorithm [8], Ant Colony Optimization [31] and hybrid methods [11, 27] focus on reducing the computation time, they are applicable only to service composition with limited number of services. A broker-based framework for QoS-aware service composition with end-to-end constraints presented in [28] gives less attention to time complexity issue.
Nowadays, local selection methods are widely used to reduce the time complexity of service selection. Local selection methods achieve time reduction by dividing the problem of selecting service combination for a given workflow into a set of independent task level subproblems. Local selection method treats selecting services for the workflow as main problem and selecting service for individual task in the workflow as subproblem. In this approach, the possible number of service combinations of ‘\(n\)’ service classes with ‘\(l\)’ number of services in each service class is only \(l \times n\).
Although the existing local selection methods such as [2, 3, 21] are efficient in meeting global QoS requirements, they can handle only sequential workflows, whereas common business workflows contain execution patterns such as AND, OR and Loop. Also, the methods such as [2, 3] use Mixed Integer Programming (MIP) to find local constraints, which has poor time characteristics when number of services grows. Another weakness that has to be resolved is with respect to the computation of values of QoS attributes for an OR pattern. Though the methods [9, 15, 19, 22] provide a formal way (computation of expected values of QoS attributes) to compute QoS attributes of an OR execution pattern, there is no guarantee that the execution of all alternate paths of the OR pattern will succeed when they are given a chance for execution. Alternately, [12] formulates the local service selection as LP model for finding optimal services. Theoretically, an LP model takes a user-defined utility function, a set of decision variables and a set of linear constraints as inputs. The model optimizes the utility function by optimizing the decision variables subject to the given constraints. Ultimately, the model produces optimal values for decision variables and utility function. Though the LP model computes optimal values for decision variables and utility function, it never helps in finding the identity of optimal service (which is prerequisite for composition). Further, though we can find the optimal values using LP models, it is not mandatory that a service with optimal value should be available in a service repository. Therefore, an efficient local selection method that alleviates the above shortcomings should be designed.
In this paper, local selection based methodology is proposed in order to alleviate the above issues. QoS requirements consist of (i) a set of QoS constraints and (ii) a set of QoS preferences. QoS constraints are based on range of QoS attributes, whereas QoS preferences are based on user’s priorities over different QoS attributes. QoS constraints represent upper and/or lower bound values that QoS attributes can take. For example, Find a Weather Service with QoS constraints: \(Cost<\)=$500 and response time \(<=1\) s. QoS preferences refer to priorities or preferences of users over different QoS attributes. For example, while querying, clients may specify their QoS preferences as 80 % priority to response time and 20 % priority to cost. QoS constraints and preferences vary from application to application.
To reduce the complexity of selecting the best available service combination, a set of independent subproblems (selecting the best available service for an individual task) equal to the number of tasks in the workflow is constructed. The subproblems are constructed using users’ QoS requirements. Normally, clients are unaware that whether their queries are implemented by single atomic service or by a composite service [4]. Hence, whatever QoS requirements they specify are meant for the entire workflow. The workflow level constraints are called as global constraints. While constructing subproblems, the global constraints are broken down into task-level constraints also known as local constraints with the condition that the aggregation of local constraints should always satisfy the global constraints. The QoS preferences need not be decomposed as they remain the same for workflow and tasks. In the following example, a user specifies his QoS requirements as QoS constraints: \(cost<\)=$5000 and latency \(<\)=70 % and QoS preferences: 80 % priority to latency and 20 % priority to cost. In order to construct subproblems, it is essential to break down the global constraints into local constraints to meet the user’s constraints, whereas user’s QoS preferences will remain the same for both workflow level selection and task-level selection as clients are unaware of composition. Further, in some specific applications if at all the users are aware of composition and if they could specify constraints and preferences for individual tasks, then the given individual constraints and preferences will be taken into account during selection. Different utility functions will be constructed for different tasks, and best services for different tasks will be selected accordingly. After constructing subproblems, the independent subproblems are solved by finding the best available service for each subproblem. Ultimately, these selected best services are combined as the best available service combination for the given workflow.
1.1 Contributions
This section highlights the contributions of the work. There is a compelling need for selection of suitable services fairly quicker in order to meet dynamically changing business processes and service updates. In this work, a new and unique method based on local selection is contributed in the field of service composition for selecting suitable services as per QoS requirements. Though there are a few methods based on local selection available for service selection, a new method is proposed that decomposes the given global constraints in less computation time which is not based on MIP [2, 3] but on extreme values of QoS attributes of service classes.
The advantages of this contribution include reduction in computation time, handling of combinational workflows with various execution patterns and 100 % guarantee for successful execution of all paths present in OR pattern. This contribution also assures improved efficiency in selection uniquely through heuristics-based constraint relaxation with user’s trade-off. Further, the model can be integrated with any service-based application which involves QoS-based selection.
As a model, firstly, the contribution fills the gap of non-availability of efficient methods in terms of computation time and handling workflows with different execution patterns such as AND, OR and Loop. The model considers selecting a suitable service combination for the given workflow as the main problem and selecting suitable service for each task (present in the workflow) from its service class as a subproblem. It decomposes the given global constraints into local constraints in such a way that the aggregation of local constraints always meets the given global constraints. It solves the subproblems simultaneously and returns the combined solution as the best available service combination. For each service class, the model computes the local constraints based on extreme (minimum and maximum) values of QoS attributes of service class rather than the QoS values of individual services. Computing local constraints based on extreme values of QoS attributes of service class makes decomposition of constraints as independent of number of services in a service class, which is a unique feature. The computation time of decomposing constraints will not change with number of services which makes the model a better choice for applications having large service space.
Secondly, any local selection approach has an inherent limitation that under some situations, the method may fail to identify a suitable service combination based on local constraints in spite of availability of such combination. The proposed model contributes a heuristics-based approach to solve the problem by relaxing local constraints within the permitted limits.
Thirdly, a new aggregation function which does not take into account the probability factor associated with the paths of an OR execution pattern while computing aggregate value of response time is proposed. This new function assures 100 % guarantee for successful execution of each alternate path of an OR pattern when it is given a chance for execution in contrast to existing aggregation function [9, 15, 19, 22], which considers probability factor of paths while computing aggregate value. With the existing function, it is not certain that every path of the OR pattern will succeed for execution as illustrated in Sect. 2.
From methodological perspective, the model performs service selection in two phases, viz., Constraint Decomposition Phase and Service Selection Phase. In Constraint Decomposition Phase, the given global constraints are decomposed into local constraints. This is done by first transforming the given workflow into sequential and then computing local constraints from the given global constraints, based on extreme values of QoS attributes of services classes. The model constructs subproblems by assigning local constraints to individual service classes. In Service Selection Phase, the model proposes an algorithm which finds suitable service for a task from its respective service class subject to its local constraints. The algorithm identifies best service from the available services (for a task) rather than optimal service. There is no guarantee that an optimal service will always exist. The model also describes the algorithmic steps involved in relaxing local constraints (still satisfying global constraints) to find a feasible solution.
From evaluation perspective as described in Sect. 4, with typical test collection, the proposed model is found to yield excellent time characteristics with sufficient accuracy (in terms of utility_ratio) when compared with existing approaches [2, 15, 21]. The model also describes how techniques such as heuristics-based constraint relaxation and user’s trade-off among different QoS attributes help in increasing the efficiency of local selection.
The above features make the method more applicable to dynamic service composition applications in different domains such as e-health and e-tourism as per the example stated earlier in this section.
2 Related work
QoS-based local selection has been handled by many approaches. A local selection method presented in [20] mainly focuses on the decomposition of functional requirements. Local selection method presented in [12] uses LP technique to find optimal services under different modes, subjective weight mode, objective weight mode and subjective-objective weight mode. Its main focus is to handle user’s preferences and objectivity of service quality characteristics. Another method presented in [4] finds the best candidate services for service composition by finding ‘skyline services’ for each class using dominance relationship. Though the work reduces the time complexity by carrying out the detection of skyline services as an offline job, its performance is affected by the number of constraints. An efficient method of decomposing constraints and distributed broker architecture is discussed in [2] for QoS-aware service selection. Though the method of decomposition of [2] is widely used by other research works [13, 14, 18, 23, 25], it has some inadequacy as discussed below.
In a service class, for each QoS attribute, there will be at least one service with minimum value and at least one service with maximum value. Hence, the value of a QoS attribute of service class ranges from a minimum to a maximum. While decomposing a global constraint, the method divides the range of QoS attribute into a set of quality levels. For each service class, the above method finds a particular quality level which has the highest benefit and assigns the same quality level as constraint for that service class. The benefit is computed using
In (1), \(p_{jk}^{z}\) represents the benefit of using \(z\)th quality level of \(k\)th attribute of \(j\)th service class, \(h(q_{jk}^{z})\) denotes the number of services that qualify the \(z\)th level, \(u(q_{jk}^{z})\) denotes the highest utility value obtained by considering the qualified services of \(z\)th level, \(u_{\mathrm{max}}\) denotes the highest utility obtained by considering all services in the \(j\)th service class and \(l\) denotes the number of services in \(j\)th service class. From (1), it is understood that the benefit of a quality level is influenced by number of services present in that level. When local constraints are fixed based on benefit, a quality level with less utility may be fixed as local constraint to a service class. In that case, the method fails to discover a service with high utility even though it exists (and hence satisfies a user less). So, the benefit of a quality level should not be influenced by the number of services that qualify that level. Further, the above approach handles only sequential workflow, and it is not applicable to the most widely used business execution patterns such as AND, OR and Loop patterns. Also, the method uses Mixed Integer Programming (MIP) to find local constraints which has poor time characteristics when number of services grows.
In [9, 15, 19, 22], the OR execution pattern is discussed with respect to computation of QoS attributes. Let us consider an OR pattern, \(u\) containing \(k\) sequential paths, \(P_{1}, P_{2},\ldots , P_{k}\). Let the \(i\)th sequential path denoted by \(P_{i}\) contain \(m_{i}\) tasks, \(t_1^i ,t_2^i ,\ldots ,t_{m_i }^i\). Let \(p_{i}\) denote the probability of execution of \(P_{i}\). Let rt(\(t_{j}^{i})\) denote the response time of \(j\)th task in \(P_{i}\). Let rt(\(P_{i})\) denote the response time of \(P_{i}\). The value of rt(\(P_{i})\) is calculated using
Let rt (\(u\)) denote the response time of \(u\). The above approaches compute the ‘expected response time’ of \(u\) using (3) and fix the computed value as rt(\(u\)).
When response time of an OR pattern is computed based on expected value as given by (3), it is not certain that every path of the OR pattern will succeed for execution when a chance is given for execution. This limitation is illustrated using an example OR unit, \(u\) as given in Fig. 2.

An example OR unit
In Fig. 2, ‘OS’ denotes OR Split and ‘OJ’ denotes OR Join. \(P_{1},P_{2},P_{3}\) and \(P_{4}\) denote the sequential paths present in \(u\). \(P_{1}\) consists of two tasks, \(t_{1}^{1}\) and \(t_{2}^{1}\). \(P_{2}\) consists of two tasks, \(t_{1}^{2}\) and \(t_{2}^{2}\). \(P_{3}\) consists of one task, \(t_{1}^{3}\). \(P_{4}\) consists of three tasks, \(t_{1}^{4}, t_{2}^{4}\) and \(t_{3}^{4}\). Based on run-time conditions, anyone of the sequential paths in \(u\) will be executed. Let \(p_{1}, p_{2}, p_{3}\) and \(p_{4}\) denote the probability of execution of \(P_{1},P_{2},P_{3}\) and \(P_{4}\), respectively. Let rt(\(u\)) denote the response time of \(u\). Now, consider typical values for probability of execution of different sequential paths and for response time (minimum response time) of different tasks as given in Tables 2 and 3, respectively.
According to (3), the value of rt(\(u\)) is computed as 1,160. When this computed value is assigned as rt(\(u\)), only \(P_{1}\) and \(P_{2}\) will succeed for execution. But \(P_{3 }\) and \(P_{4}\) will fail because the response time of \(P_{3}\) and \(P_{4}\) (1,600 and 1,400, respectively) is greater than rt(\(u\)). Such failures affect the reliability and predictability of workflows. The failure of paths \(P_{3}\) and \(P_{4}\) is due to the consideration of probability factors of the paths of the OR pattern during the computation of response time. So, the probability of a path in OR pattern is meant to represent the chance of choosing a path for execution. Probability factors should not be considered while computing QoS (response time).
As a novel approach to find response time of an OR unit which alleviates the above failure, initially the response time of each sequential path is computed. Let rt(\(P_{i})\) denote the response time of \(i\)th sequential path. Let \(k\) be the number of paths in \(u\). Let \(m_{i}\) denote the number of tasks present in \(i\)th sequential path. The value of rt(\(P_{i})\) is calculated using (2), and the value of rt(\(u\)) is computed using
If rt(\(u\)) is computed according to (4), then all the paths present in the OR unit will have sufficient time for execution. Using (4), the value of rt(\(u\)) for the example OR unit is computed as 1600. With this computation, the execution through any path of OR unit will become successful.
In any service-based application, it is very essential to allot the minimum required time for execution to all tasks/paths/ that are present in an OR pattern to ensure 100 % guarantee for successful execution of composite service.
There may be situations where the minimum required time itself may not satisfy the client’s demand for response time. This means that a client may require a response time which is lesser than the minimum required time. Certainly, it is essential to consider QoS requirements of clients, but the minimum time required to meet 100 % successful execution cannot be comprised to meet user’s QoS constraints. If we comprise the time allotment, the most probable path (and hence most probable workflow) itself will fail even with best case services. This is illustrated with the following example.
Consider that Mr. X wants to travel from a place, say, \(A\) to another place, say, \(B\). Imagine that the travel can be performed using two modes of transport, namely flight and train. The probability of travel by the two modes of transport is 10 and 90 % respectively. Mr. X wants to book his ticket with a Booking Service. The example is realized with an OR unit as given in Fig. 3. Let \(u\) denote the OR pattern given in Fig. 3. The pattern consists of two sequential paths, \(P_{1}\) and \(P_{2}\). Each path contains single task. The path \(P_{1}\) contains the task \(t_{1}\), and \(P_{2}\) contains \(t_{2}\). Corresponding to each task, multiple services are available to implement the functionality of that task, but with different QoS characteristics. Services which have similar functionality but different QoS corresponding to a task would form the service class of that task. Now, within a service class for each QoS attribute, there may be at least one service having minimum value for that attribute and there may be at least one service having maximum value of that attribute. Hence, the value of QoS attribute of a service class ranges from a minimum to maximum. Let \(t_{i}\) denote \(i\)th task. Let \(p_{i}, \hbox {min}\_rt(t_{i})\) and \(\hbox {max}\_rt(t_{i})\) denote the probability of execution, minimum response time and maximum response time of \(t_{i}\). The values of probability of execution, minimum response time and maximum response time of different tasks are given in Table 4.

Another OR pattern
Let \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) denote the minimum response time and maximum response time of \(u\). The values of \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) are computed using (3) (for simplicity, we call this method of computing response time as conventional approach), and proposed method of computing response time for an OR pattern using (4) is given in Table 5.
When the values of \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) are fixed according to conventional approach (i.e., 920 and 930), the task \(t_{2}\) which has 90 % probability for execution will fail for execution. This task cannot be executed even with best service offer with minimum response time (1,000).
Here, irrespective of whether the OR pattern can meet user’s constraint of response time, the pattern fails for 90 % of its execution because of the insufficient allotment of time. Here, the reliability of the workflow will be lost. If we allot insufficient time to a workflow which may contain many OR patterns, we cannot even predict the success of the workflow which ultimately affects the client’s satisfaction.
Hence, the first aspect to be considered is to allot the minimum required time which guarantees 100 % successful execution, and then, the second aspect is to be considered is how to fulfill the user’s constraints.
Let grt denote the user’s constraint of response time. Whether the OR execution pattern given in Fig. 3 is guaranteed for successful execution with respect to different cases of grt with the response time of the OR pattern computed using conventional and proposed methods are given in Table 6.
From Table 6, the proposed method of computing QoS values are found to satisfy the given user’s constraints very well when compared to conventional method. Only when \(grt<\hbox {min}\_rt(u)\), the execution is not guaranteed for 100 % and in this case, negotiation can be made with users for relaxing the constraint just to meet 100 % guarantee for successful execution with best service offers. For any other value of \(grt\ge \hbox {min}\_rt(u)\), the OR pattern is found to be 100 % feasible with either best case or other services.
Another work [16] employs a hierarchical Petri nets-based approach to decompose global constraints into local constraints for different tasks in a general flow structure. But this method computes QoS attributes of an OR unit based on expected values and assigns constraints accordingly. Hence, all branches of an OR unit are not guaranteed to be successful.
Based on the motivation from the literature survey, this work proposes an alternate service selection methodology through an efficient decomposition of QoS constraints and a new method of computing QoS values for an OR pattern.
3 Methodology
Global selection method is a time-consuming process, and it cannot be used in real-time situations. To reduce the time complexity of the global approach, the proposed methodology uses local selection method. The methodology has two phases, viz., Constraint Decomposition Phase and Service Selection Phase that are performed in sequence. In Constraint Decomposition Phase, the given QoS constraints are decomposed into task-level constraints in such a way that the aggregation of local constraints always meets the given global constraints. Using task-level constraints and the given QoS preferences subproblems are constructed. In Service Selection Phase, each subproblem is solved to select the best available service based on user-defined utility (constructed using the user’s preferences over different QoS attributes) from its service class subject to its local constraints. Ultimately, the services selected for all the tasks are combined to produce the best available service combination for the given workflow.
3.1 Constraint decomposition phase
The structure of a workflow may vary from a sequential as in Fig. 4 to a combinational structure that contains various execution patterns such as AND, OR and Loop as in Fig. 5.

Sequential workflow

Combinational workflow
In Fig. 5, ‘AS’ represents AND Split, ‘AJ’ represents AND Join, ‘OS’ represents OR Split, ‘OJ’ represents OR Join, ‘LS’ represents Loop Start and ‘LJ’ denotes Loop Join. An execution pattern starts from AS to AJ forms an AND unit, an execution pattern starts from OS to OJ forms an OR unit and execution pattern starts from LS to LJ forms a Loop unit with number of iterations given in brackets. An AND/OR/Loop unit can contain sequential paths of tasks (such as \(t_{4}, t_{5}\) and \(t_{6})\), zero or more other AND, OR units and Loop structures (like OR unit of \(t_{8}\) and \(t_{9}\) in sequential combination with \(t_{7}\), Loop of \(t_{2}\) and \(t_{3})\) in it.
The decomposition of global constraints into local constraints is dependent on the method of computing QoS attributes for various execution patterns present in a workflow. The execution patterns that exist in a workflow may vary from a simple sequential task to series of sequential tasks to AND/OR/Loop units. The AND/OR/Loop units may be simple or complex. Any simple AND or OR unit will contain only sequential paths. A simple Loop contains only one sequential path in it. A complex unit may contain other simple/complex units inside. The proposed method of decomposing constraints is described using the QoS attribute, ‘response time’. Computation of response time for various simple units is given in Table 7. In Table 7, \(rt(t_{j})\) denotes response time of \(j\)th task, \(P_{i}\) denotes \(i\)th sequential path in AND/OR unit and \(rt(P_{i})\) denotes response time of \(P_{i}\).
During decomposition of constraints, three tasks should be performed. As the workflow ranges from sequential to combinational workflow with complex execution patterns, the given workflow is converted into its equivalent sequential workflow firstly.
Secondly, before decomposition, it is necessary to check whether there exists at least one service combination that satisfies the given global constraint. This is accomplished using the best service from each service class. The best service from each service class is combined to form the best service combination. The QoS of the best service combination is computed and tested against the given global constraint. If the best service combination satisfies the given global constraint, then the given global constraint will be considered for decomposition. Otherwise, there will be no service combination available to implement the given workflow subject to the given constraints. In such case, the constraints will not be considered for decomposition, and the user can relax the constraints or he has to find services provided by yet other providers.
Thirdly, if a given constraint is found to be decomposable, it will be decomposed into local constraints and local constraints will be assigned to individual tasks. Further, to carry out the above tasks, the Constraint Decomposition Phase is split into three steps, namely conversion, decomposability check and decomposition of constraints.
3.1.1 Conversion
In this first step, the given workflow denoted by \(W\) is converted into sequential workflow denoted by \(W'\). To illustrate the method of conversion, initially, the basic methods of conversion of simple AND, simple OR and simple Loop units are discussed. Any workflow can be converted into sequential workflow using these basic methods.
1) Conversion of Simple AND/OR/Loop Units (Basic methods)
Let us consider a simple unit \(u\). The unit \(u\) may be a simple AND or a simple OR or a simple Loop. Let us consider \(u\) as a simple AND unit or a simple OR unit as in Fig. 6. Let \(k\) be the number of sequential paths in \(u\) . Let ‘ \(P_{i}\) ’ denote the \(i\)th sequential path in \(u\). Let \(m_{i},1\le i\le k\) be the number of tasks in \(P_{i}\). Let \(t_{j}^{i}\) denote the \(j\)th task in \(P_{i}\). The value of a QoS attribute of a task (or service class) varies from a minimum to a maximum as the service class contains many functionally similar services with varying QoS, and therefore, there will be a service with minimum value and a service with maximum value in the service class. Let min _rt(\(t_{j}^{i})\) and \(\hbox {max}\_rt(t_{j}^{i})\) denote the minimum response time and maximum response time of \(t_{j}^{i}\). Let \(\hbox {min}\_ rt(P_{i})\) and \(\hbox {max}\_rt(P_{i})\) denote the minimum response time and maximum response time of \(P_{i}\).

Simple AND/OR unit
For each \(1\le i\le k\), the values of \(\hbox {min}\_rt(P_{i})\) and \(\hbox {max}\_rt(P_{i})\) are calculated using (5) and (6).
Let \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) denote minimum response time and maximum response time of \(u\). The values of \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) are calculated using (7) and (8).
Now, the given AND or OR unit is replaced by a sequential new-task whose minimum response time and maximum response time are equal to \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\), respectively.
Consider \(u\) as a simple Loop that contains z sequential tasks as given in Fig. 7.

Simple loop unit
Let ‘\(t_{i}\)’ denote \(i\)th task in \(u\). Let \(\hbox {min}\_rt(t_{i})\) and \(\hbox {max}\_rt(t_{i})\) denote the minimum response time and maximum response time of \(t_{i}\). Let \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) denote the minimum response time and maximum response time of \(u\). Let ‘\(m\)’ denote the number of iterations that u takes. The values of \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\) are calculated using (9) and (10).
Now, \(u\) can be replaced by a sequential new-task whose minimum response time and maximum response time are equal to \(\hbox {min}\_rt(u)\) and \(\hbox {max}\_rt(u)\), respectively.
2) Conversion of given workflow into sequential workflow
Initially, all simple AND/OR/Loop units in the given workflow are converted into new-tasks using the basic methods. The resulting workflow may be a sequential or a combinational workflow. In the latter case, the conversion process is repeated until a sequential workflow is obtained. This sequential workflow is denoted by \(W^{{\prime }}\), and this workflow contains two kinds of tasks old tasks (sequential tasks in the given workflow) and new-tasks (converted tasks).
3.1.2 Decomposability check
In decomposability check, the compliance of \(W^{{\prime }}\) for its fulfillment against the given global constraint of response time is tested as follows.
Let \(t_{1}, t_{2},\ldots , t_{m}\) denote the old tasks in \(W^{{\prime }}\). Let \(t_{1}^{{\prime }}, t_{2}^{{\prime }},\ldots , t_{n}^{{\prime }}\) be the new-tasks in \(W^{{\prime }}\). Let \(\hbox {min}\_rt(t_{1}), \hbox {min}\_ rt(t_{2}),\ldots , \hbox {min}\_rt(t_{m})\) denote minimum response time of 1st, 2nd,\({\ldots }, m\)th old tasks and \(\hbox {min}\_rt(t_1^{\prime } ),\hbox {min}\_rt(t_{_2 }^1 ),\ldots ,\hbox {min} \_rt(t_n^{\prime })\) denote minimum response time of 1st, 2nd,\({\ldots },n\)th new-tasks. Let \(\hbox {max}\_ rt(t_{1}), \hbox {max}\_rt(t_{2}),\ldots , \hbox {max}\_ rt(t_{m})\) denote maximum response time of 1st, 2nd ,\({\ldots },m\)th old tasks. Let \(\hbox {max} \_rt(t_1^{\prime }), \hbox {max} \_rt(t_{_2 }^1),\ldots ,\hbox {max} \_rt(t_n^{\prime } )\) denote maximum response time of 1st, 2nd,\({\ldots },n\)th sequential new-tasks. Let \(\hbox {min}\_rt(W^{{\prime }})\) and \(\hbox {max}\_ rt(W^{{\prime }})\) denote the minimum response time and maximum response time of \(W^{{\prime }}\) respectively. The values of \(\hbox {min}\_ rt(W^{{\prime }})\) and \(\hbox {max}\_rt(W^{{\prime }})\) are found using (11) and (12).
Let ‘grt’ denote the given global constraint of response time. If \(\hbox {min}\_rt(W^{{\prime }})>grt\), the given workflow cannot be implemented using the available services. In this case, the user can relax the constraints or he has to find services provided by yet other providers. If \(\hbox {min}\_rt(W^{{\prime }})\le grt, W^{{\prime }}\) is a feasible workflow. In the case of feasible workflow, the given global constraints are decomposed into task level constraints.
3.1.3 Decomposition of constraints
Based on the values of \(\hbox {min}\_rt(W^{{\prime }})\) and \(\hbox {max}\_rt(W^{{\prime }})\) and global constraint of response time, two local constraints of response time, namely lower bound constraint of response time and upper bound constraint of response time for each task in \(W^{{\prime }}\) are computed. The assignment of lower and upper bound constraints to old tasks and new-tasks in \(W^{{\prime }}\) is described below.
1) Assignment of constraints to old tasks
Let \(\hbox {min}\_rt(t_{i})\) and \(lcrt(t_{i})\) denote the minimum response time and the lower bound constraint of response time of \(t_{i}\). The value of \(lcrt(t_{i})\) is assigned using (13).
Let \(ucrt(t_{i})\) denote upper bound constraint of response time of \(t_{i}\). The value of \(ucrt(t_{i})\) is computed for two different cases as follows.
Case 1: when \(\hbox {min}\_rt(W^{{\prime }})=grt\)
The value of \(ucrt(t_{i})\) is computed using (14).
Case 2: when \(\hbox {min}\_rt(W^{{\prime }})<grt\)
In this case, there are two subcases.
SubCase 2a: when \(\hbox {max}\_rt(W^{{\prime }})\le grt\)
The value of \(ucrt(t_{i})\) is computed using (15)
SubCase 2b: when \(max\_rt(W^{{\prime }})> grt\)
The value of \(ucrt(t_{i})\) is computed using (16)
2) Assignment of constraints to new-tasks
In the case of a new-task, initially, the upper bound constraint of response time of a new-task is computed based on \(\hbox {min}\_ rt(W^{{\prime }}), \hbox {max}\_rt(W^{{\prime }})\) and grt. Let \(ucrt(t_{i}^{{\prime }})\) denote the upper bound constraint of response time of \(t_{i}^{{\prime }}\). The value of \(ucrt(t_{i}^{{\prime }})\) is computed for two different cases as follows.
Case 1: when \(\hbox {min}\_rt(W^{{\prime }})=grt\)
The value of \(ucrt(t_{i}^{{\prime }})\) is computed using (17)
Case 2: when \(\hbox {min}\_rt(W^{{\prime }})<grt\)
In this case, there are two subcases.
SubCase 2a: when \(\hbox {max}\_rt(W^{{\prime }})\le grt\)
The value of \(ucrt(t_{i}^{{\prime }})\) is computed using
SubCase 2b: when \(\hbox {max}\_rt(W^{{\prime }})> grt\)
The value of \(ucrt(t_{i}^{{\prime }})\) is computed using (19)
Now, corresponding to each new-task, there will be a simple unit. From the constraints of a new-task, the constraints of its corresponding simple unit are calculated. From the constraints of a simple unit, the constraints of tasks present in that unit will be computed.
To illustrate the assignment of constraints from a new-task to its respective unit and to the tasks present in the respective unit, a particular new-task \(t^{{\prime }}\) is considered. Let \(u(t^{{\prime }})\) denote the simple unit corresponding to \(t^{{\prime }}\). This simple unit \(u(t^{{\prime }})\) may be a simple AND or a simple OR or a simple Loop. Let \(ucrt(u(t_{i}^{{\prime }}))\) denote the upper bound constraint of response time of \(u(t^{{\prime }})\). The value of \(ucrt(u(t_{i}^{{\prime }}))\) is computed using
Consider \(u(t^{{\prime }})\) as a simple AND/OR unit. Let ‘k’ denote the number of sequential paths present in \(u(t^{{\prime }})\). Let \(P_{1}, P2,\ldots , P_{k}\) denote first, second ,\({\ldots },k\)th sequential path in \(u(t^{{\prime }})\). Let ‘\(m_{i}\)’ denote the number of tasks in an \(i\)th sequential path denoted by \(P_{i}\). Let \(t_{j}^{i}\) denote the \(j\)th task in \(P_{i}\). Let \(\hbox {max}\_rt(P_{i})\) denote maximum response time of \(P_{i}\). Let \(lcrt(t_{j}^{i})\) denote the lower bound constraint of response time of \(t_{j}^{i}\). Let \(ucrt(t_{j}^{i})\) denote the upper bound constraint of response time of \(t_{j}^{i}\). When a workflow is found to be feasible, then for each task, the minimum response time of that task is assigned as the lower bound constraint of the task. Thus, the value of \(lcrt(t_{j}^{i})\) is calculated using (21)
The value of \(ucrt(t_{j}^{i})\) is computed using (22)
Consider \(u(t^{{\prime }})\) as a simple Loop that contains ‘\(z\)’ tasks in the sequential path \(P\). Let ‘\(m\)’ be the number of iterations that \(u(t^{{\prime }})\) takes. Let \(t_{i}\) denote \(i\)th task in \(P\). Let \(lcrt(t_{i})\) denote the lower bound constraint of \(t_{i}\). Let \(ucrt(t_{i})\) denote the upper bound constraint of \(t_{i}\). The values of \(lcrt(t_{i})\) and \(ucrt(t_{i})\) are computed using (23) and (24).
Thus, the local constraints are assigned to all individual tasks in the given workflow.
3.2 Service selection phase
Service users have a set of QoS preferences based on their applications. The influence of a particular attribute on the user’s utility may be different from that of other attributes. Also, the attributes may be negative or positive. Negative attributes such as response time, latency and cost should be minimized. Positive attributes such as availability, scalability and reliability should be maximized. The preferences of user are modeled as a utility function using Simple Additive Weighting (SAW) technique [26]. The method presented in [2] is used for computing utility, and the utility of an \(i\)th service of \(j\)th service class is computed using
In (25), \(Q_\mathrm{max}^{\prime } (k)\) and \(Q_{\mathrm{min}}^{{\prime }}(k)\) denote the maximum and minimum values of \(k\)th QoS attribute of the given workflow. The value of \(Q_{\mathrm{max}}^{\prime } (k)\) is computed by aggregating the maximum values of \(k\)th attribute of all service classes by which the workflow is constructed. Similarly, the value of \(Q_{\mathrm{min}}^{\prime } (k)\) is computed by aggregating the minimum values of \(k\)th attribute of all service classes by which the workflow is constructed. \(Q_{\mathrm{max}}(j,k)\) represents the maximum value of \(k\)th attribute of \(j\)th service class. \(q_{k}(s_{ji})\) represents the value of \(k\)th attribute of \(i\)th service of \(j\)th service class, and \(w_{k}\) represents the weight of \(k\)th attribute. The utility function is subject to the condition, \(\sum _{k=1}^{r}w_{k}=1\) where \(r\) denote the number of attributes. The selection of the best available service for each task in the workflow is a subproblem, and it is formulated thus:
For each task \(t_{j}\), select a service \(s_{ji}\) from its respective service class, \(S_{j}\) as the best available service subject to the conditions: \(U(s_{ji})\) should be maximum of all \(s_{ji}\in S_{j}\) and \(s_{ji}\) should satisfy the constraints of \(t_{j}\).
In real-time service composition, the QoS constraints and preferences will be known only during querying time and precomputation of utility function, and its sorting is not possible for assisting quick selection of the best available service for a given task. Hence, an iterative searching procedure is developed to identify the best available service, and its pseudo code is given in Listing 1.
Listing 1 Pseudo code of searching procedure

The best available services identified for all tasks of a given workflow are combined to produce the best available service combination.
Further, how the two phases of the proposed methodology work is illustrated with a simple example in Appendix A (supplementary material).
4 Experimentation
There are three objectives of experimentation. The first one is to find the computation time of the proposed method to select appropriate services for composition. The computation time is found out as the sum of computation time of Constraint Decomposition and Service Selection phases. The second one is to check the correctness of the proposed approach with standard approach. The third one is to compare the computation time of the proposed approach with other existing local approaches.
Toward experimentation, prototype as in Fig. 8 has been implemented and various experiments have been conducted.

Architecture of the prototype
The workflows from sequential to simple combinational are considered for testing the methodology. In this prototype, the input workflow is represented as a matrix denoted by \(M\).
The steps involved in representing a simple combinational workflow as a matrix are given in Listing 2.
Listing 2 Steps involved in representing a workflow as matrix
Step 1: Assign continuous numbering to tasks present in the workflow. The number assigned to a task becomes the ID of that task. Let an \(i\)th task be denoted by \(t_{i}\) where \(i\) denotes the ID of the task. For example, the tasks present in the workflow (please refer Fig. 9) are assigned IDs as in \(t_{1}, t_{2}, t_{3},{\ldots }t_{12}\). IDs are assigned from 1 to \(n\) where \(n\) denotes the number of tasks present in the workflow. |
Step 2: The type of execution pattern in which a task is present is called its unit type. Let \(ut(t_{i})\) denote the unit type of \(i\)th task. For each \(t_{i}, ut(t_{i})\) can take values 1,2 and 3 according to AND, OR and Loop, respectively, in which \(t_{i}\) is present. If \(t_{i}\) is present as an individual task, \(ut(t_{i})\) is 4. |
Step 3: Assign numbers to patterns. The number assigned to a pattern becomes the unit ID for the tasks present in that unit. In our numbering, we assign numbers to all patterns such that AND patterns receive continuous numbering starts from 1. Similarly, OR patterns and Loops receive continuous numbering starting from 1, i.e., AND units are numbered as 1,2,3 and so on and OR units are numbered as 1,2,3 and so on. Similarly, Loop patterns are numbered as 1,2,3.... When two units receive same number, they are differentiated by unit type. Now, for each task \(t_{i}, u(t_{i})\) denotes the unit ID of \(t_{i}\). Further, for individual tasks, \(u(t_{i})=0\) |
Step 4: For each pattern, assign continuous numbering starting from 1 to sequential paths present in that pattern. The number assigned to a sequential path becomes the path ID for the tasks present in that path. Let \(sp(t_{i})\) denote path ID of \(t_{i}\). When two sequential paths receive same number, they are differentiated by unit ID and unit type |
Step 5: Now, each task can be uniquely identified using unit type, unit ID and path ID. |
Step 6: For each task \(t_{i}\), if it is present in a loop, the number of iterations denoted by \(it(t_{i})\) takes an integer greater than 0. Otherwise, \(it(i)=0\) . |
Let \(\hbox {min}\_rt(t_{i}), \hbox {max}\_rt(t_{i}), lcrt(t_{i})\) and ucrt(\(t_{i})\) denote the minimum response time, maximum response time, lower bound constraint of response time and upper bound constraint of response time of \(t_{i}\), respectively. For each \(t_{i}\), the values of \(ut(t_{i}), u(t_{i}), sp(t_{i})\) and \(it(t_{i})\) are captured from the given workflow. For each \(t_{i}\), the values of \(\hbox {min}\_rt(t_{i})\) and \(\hbox {max}\_ rt(t_{i})\) are also given as inputs. |
Now, the given workflow is represented as a Matrix, \(M\), such that \(M=(M_{ij},1\le i\le n, 1 \le j \le 9\)). The order of \(M\) is given as \(n\times 9\) where ‘\(n\)’ denotes the total number of tasks present in the workflow. Let \(i\)th row of \(M\) denote \(i\)th task of the workflow. For each \(i\)th row, the values of task ID, \(ut(t_{i}), u(t_{i}), sp(t_{i}), \hbox {min}\_rt(t_{i}), \hbox {max}\_rt(t_{i}), it(t_{i}),lcrt(t_{i})\) and \(ucrt(t_{i})\) denote 1st, 2nd, 3rd, 4th, 5th, 6th, 7th, 8th and 9th columns of \(M\). Given the above details for each \(t_{i}\), the values of \(lcrt(t_{i})\) and \(ucrt(t_{i})\) are computed using the proposed method of decomposition and updated in the matrix. |
(Please note: along with the above details of tasks as matrix, global constraints also will be given as inputs to decomposition phase as in Fig. 8. Also note that the values of columns 8 and 9 of the matrix are initialized to 0. At the end of Constraint Decomposition Phase, the values of lower and upper bound constraints of tasks are updated in 8th and 9th columns of the matrix respectively.) |
Let us consider a simple combinational workflow shown in Fig. 9. Let the workflow be denoted by \(W\). According to the steps given in Listing 2, the details of tasks are captured in Table 8. There are 12 tasks in \(W\). The tasks are numbered from 1 to 12. The workflow contains one AND unit, 2 OR units and one Loop. AND unit is numbered as 1. The two OR units are numbered as 1 and 2. The Loop unit is numbered as 1. The AND unit contains 5 tasks, namely \(t_{1}, t_{2}, t_{3}, t_{4}\) and \(t_{5}\). Now, we have \(ut(t_{1})=1; ut(t_{2})=1; ut(t_{3})=1; ut(t_{4})=1; and \, ut(t_{5})=1\). Also, we have \(u(t_{1})=1; u(t_{2})=1; u(t_{3})=1; u(t_{4})=1; and u(t_{5})=1\).

An example workflow taken to illustrate matrix representation
There are two sequential paths in the AND unit 1, and they are numbered as 1 and 2. The tasks \(t_{1}, t_{2}\) and \(t_{3}\) are present in sequential path 1 and hence \(sp(t_{1})=1; sp(t_{2})=1; sp(t_{3})=1\). The tasks \(t_{4}\) and \(t_{5}\) are present in sequential path 2 and hence \(sp(t_{4})=2; sp(t_{5})=2\). The task \(t_{6}\) is present in Loop pattern with \(ut(t_{6})=3;u(t_{6})=1; sp(t_{6})=1; it(t_{6})=3\). The OR unit 1 contains 2 sequential paths numbered as 1 and 2. Using the steps given in Listing 2, we have unit types of \(t_{7}, t_{8}\) and \(t_{9}\) as \(ut(t_{7})=2; ut(t_{8})=2; ut(t_{9})=2\). The unit IDs of \(t_{7}, t_{8}\) and \(t_{9}\) are given as \(u(t_{7})=1; u(t_{8})=1; u(t_{9})=1\), and path IDs of \(t_{7}, t_{8}\) and \(t_{9}\) are given as \(sp(t_{7})=1; sp(t_{8})=1; sp(t_{9})=2\). In a similar manner, details of other tasks are captured and given in Table 8. Also, note that assumed values are given for \(\hbox {min}\_rt(t_{i})\) and \(\hbox {max}\_ rt(t_{i})\).
The details of tasks described in Table 8 can be mathematically visualized as a Matrix, \(M\), such that \(M=(M_{ij},1 \le i\le n,1\le j\le 9\)). That is the order of \(M\) is \(n\times 9\) where ‘\(n\)’ denotes the total number of tasks present in \(W\). Let the \(i\)th row of \(M\) denote the details of the \(i\)th task of \(W\), and the columns of an \(i\)th row are admitted according to the columns of Table 8. The combinational workflow given in Fig. 9 is represented in its matrix form as in Fig. 10.

Matrix representation of the example workflow
The workflow in Matrix form and the global constraints is given as inputs to Constraint Decomposition Phase. The given constraints are broken into local constraints and updated in the 8 and 9th columns of \(M\). The updated matrix, user’s QoS preferences and the values of QoS attributes of individual services of different service classes (which is archived in QoS Repository) are given as input to Service Selection Phase. In Service Selection Phase, the best available services for different tasks of the workflow are identified simultaneously (using multiple threads) as per the search procedure given in Sect. 3.2.
Regarding test data for Constraint Decomposition Phase, in practice, the workflows are of different nature right from sequential workflow to combinational one. Hence, it is proposed to find the time taken for decomposing constraints to various cases such as sequential workflows, workflows having AND patterns, workflows having OR patterns, workflows have Loop patterns and workflows having combination of AND, OR and Loop patterns. This necessitates the construction of specific test collection for Constraint Decomposition Phase. So, a collection of specific workflows (having specified number of tasks, execution patterns, constraints, etc) according to requirements of experiments is constructed/synthesized and represented as matrices.
To study the computation time of Service Selection Phase, the QoS dataset from [Al-masri et al. http://www.uoguelph.ca/~qmahmoud/qws/index.html/] is used. The dataset contains 9 QoS attributes for 2500 real Web services. The QoS attributes include response time, availability, throughput, likelihood of success, reliability, compliance, best practices, latency and documentation. Using this dataset as base, QoS data have been created for a collection of 10,000 services.
Experiments are performed on a Laptop with Intel Pentium(R) Dual-Core, 2.20 GHz CPU, 3.0 GB memory and Windows 7 Ultimate Operating System. The pseudocode of the Constraint Decomposition Phase which is given in Appendix B (supplementary material) and the procedure for Service Selection Phase are implemented in Java 1.6 (J2SE) with Eclipse IDE.
4.1 Computation time of constraint decomposition phase
As the input workflow may vary from sequential to combinational one, time taken for decomposing constraints to various cases such as sequential workflow, simple AND/OR pattern, simple Loop and simple combinational workflow is discussed.
Case 1: The time taken for decomposing constraints to a sequential workflow by varying the number of service classes in the workflow from 10 to 100 is given in Fig. 11.

Time taken for decomposing constraints to a sequential workflow by varying number of service classes
Case 2: The mechanism of decomposing and assigning constraints to a simple OR unit is same as that of a simple AND unit. Time taken for decomposing constraints to an AND/OR is calculated by varying the number of sequential paths in the pattern from 2 to 10. Time taken for decomposing constraints with respect to number of sequential paths is given in Fig. 12. In this example, each sequential path typically contains 2 service classes.

Time taken for decomposing constraints to a simple AND/OR pattern by varying number of sequential paths
Case 3: Time taken for decomposing constraints to a simple Loop by varying number of service classes from 10 to 100 is given in Fig. 13.

Time taken for decomposing constraints to a simple loop by varying number of service classes
Case 4: The time taken for decomposing constraints to a simple combinational workflow which contains Simple AND, Simple OR and Simple Loop patterns is computed by varying the number of execution patterns is given in Fig. 14. The number of patterns in the workflow is varied from 3 to 30 in steps of 3. During experiment, the number of AND units is increased by 1, the number of OR units is increased by 1 and the number of Loops is increased by 1. In this case, each AND/OR units contains 2 sequential paths with each sequential path containing 10 service classes. Each simple Loop typically contains 10 service classes.

Time taken for decomposing constraints to a simple combinational workflow by varying number of execution patterns
Case 5: Time taken for decomposing constraints to a simple combinational workflow by varying number of execution patterns for varied number of QoS constraints, denoted by ‘m’, is given in Fig. 15. For experimentation, negative attributes, namely response time, latency and cost, are chosen.

Time taken for decomposing constraints to a simple combinational workflow by varying number of execution patterns for varied number of QoS constraints
The summary of time taken for decomposing constraints to different cases, namely sequential workflow, AND, OR, Loop and simple combinational workflow, is given in Table 9. In Table 9, \(\hbox {N}_{\mathrm{AND}}, \hbox {N}_{\mathrm{OR}}, \hbox {N}_{\mathrm{Loop}}\) denotes the number of AND, OR and Loop patterns present in a workflow. \(\hbox {N}_{\mathrm{path}}\) denotes the number of sequential paths present in an AND/OR/Loop. \(\hbox {N}_{\mathrm{sc}}\) denotes the number of service classes present in a sequential workflow/AND/OR/Loop/combinational workflow. \(\hbox {N}_{\mathrm{cons}}\) denotes the number of constraints and \(t_{decompose}\) denotes the time taken for decomposing constraints.
From Table 9, it is found that the time required for decomposing constraints to an AND unit of 10 service classes (574 \(\upmu \)s) is more than that of a sequential workflow having 10 service classes (5 \(\upmu \)s). Because in case of AND unit, the minimum response time and maximum response time of the unit are computed, and before allocating constraints, the unit is converted into a single new-task. From the minimum response time and maximum response time of the new-task, the constraints of the corresponding sequential paths and tasks are computed. Due to the additional operations, the time involved in AND (or OR unit) is more than that of sequential workflow.
It is seen that time involved in fixing constraints to a Loop of ‘n’ service classes is same as that of a sequential workflow of same ‘n’ service classes because the conversion of simple Loop into sequential workflow requires only two extra operations. The first one is multiplication operation to multiply extreme values of response time of sequential path by the number of iterations of the Loop. The second one is reverse division operation while assigning constraints to individual tasks in the Loop (these operations consume time of only few nanoseconds). Further, it is observed that the increase in time taken for decomposing constraints to sequential workflow/AND/OR/Loop with respect to number of service classes/sequential paths is very gradual. From Fig. 15 and Table 9, the increase in decomposition time is found to vary by very small amount with respect to number of constraints. For example, for a workflow containing 500 tasks (10 AND patterns, 10 OR patterns and 10 Loops), the increase in decomposition time is only 2.01 ms (from 10.885 to 12.895) when the number of constraints is increased from 1 to 3.
4.2 Computation time of service selection phase
In Constraint Decomposition Phase, local constraints for different tasks are updated in the matrix M. QoS attributes of all services are available in the QoS repository as in Fig. 8. The priorities of user over different QoS attributes are captured. To find the utility of any \(i\)th service in \(j\)th service class, a utility function is constructed according to (25).
The updated matrix M, the utility function and the values of QoS attributes of all services of different service classes (from the QoS repository) are given as inputs to Service Selection Phase. Here, the QoS values of services should be retrieved from the QoS repository, and the values should be available to Service Selection Phase. The QoS values of services may be archived in different formats such as text file, excel file and database in the repository. The retrieval of QoS values from QoS repository to Service Selection Phase is an external process as in Fig. 8. Hence, the time taken for retrieval of QoS from repository to service selection phase is an external factor, and it should be excluded while calculating the computation time of Service Selection Phase.
In this work, the QoS values of test services are archived in a disk file. Though the retrieval of QoS is an external process, it is a prerequisite for service selection. Code has been developed to retrieve QoS attributes from file (disk) to an array (memory). Let \(t_{retrieval}\) denote the time taken for retrieving QoS attributes from disk to memory. Let ‘m’ denote the number of constraints and \(l\) denote the number of services in a service class. To provide an insight into time requirement of retrieval process, the value of \(t_{retrieval}\) with respect to \(l\) and m is given in Table 10.
From Table 10, it is understood that \(t_{retrieval}\) varies by a significant amount of time with respect to number of services. For example, when the number of services is increased from 500 to 10,000 (with m = 1), the retrieval time has increased from 21.844 to 69.187 ms. But for a given number of services, the variation in retrieval time with respect to number of constraints is less. For example, for 10,000 services, time taken for retrieving one attribute, two attributes and three attributes is 69.187, 70.547 and 72.691 ms, respectively.
From the above study, it is understood that a considerable amount of time of the order of few tens of milliseconds is involved in retrieving QoS. As the retrieval of QoS is a prerequisite for service selection, it is suggested that the retrieval of QoS values can be done prior to querying toward quick service selection. Also, to handle changes in QoS values of services, the values of QoS should be refreshed at specific intervals. In [22], the authors have monitored how frequently the QoS values of services change at different times of day with a collection of 39 service instances. The authors found that the QoS values of services tend to remain fixed from 13:30 to 21:30 h. Further, changes in QoS values have been observed at 1:33, 4:46, 7:39 and 12:29 h. The preloading of QoS attributes will reduce the time involved in selection of appropriate services. As in dynamic service composition, time is crucial; keeping literature [22] as evidence, we suggest refreshing the loaded QoS values once in 30 min.
During Service Selection, the QoS values of each service are verified for their fulfillment against the local constraints. This gives a set of services that satisfy the given constraints. From this set of services, the service which produces the maximum value for the user-defined utility function is selected as the best available service. Let \(t_{select}\) denote the time taken for verifying constraint fulfillment and selecting the best available service from a single service class. The service selection process for each task in independent, and hence, the process of service selection for different tasks is performed simultaneously using multiple threads.
The time taken for selecting the best available service from a service class with respect to \(l\) and m is found out, and the results are given in Table 11 and in Fig. 16. During experiment, the number of services is varied from 500 to 10,000, and m is varied from 1 to 3. QoS constraints, namely response time, cost and latency, are used for testing.

Time taken for selecting the best available service from a service class with respect to number of services for varied number of QoS constraints
The summary of computation time of Service Selection Phase is given in Table 12.
In Table 12, \(\hbox {N}_{\mathrm{service}}\) denotes number of services in a service class, \(\hbox {N}_{\mathrm{cons}}\) denotes number of constraints and \(t_{select}\) denotes the time required for verifying QoS values and finding the best available service. From Table 12, it is found that the increase in \(t_{select}\) with respect to number of constraints is very small and negligible. Also, from Table 11 and Fig. 16, it is seen that the increase in \(t_{select}\) with respect to number of services is linear.
4.3 Testing the correctness of the proposed approach
The correctness of the proposed method is evaluated by comparing the results obtained using the proposed method with the results obtained using global approach (taken as standard). We define utility_ratio as the ratio of utility obtained using the proposed approach to the utility obtained using the global approach. The value of utility_ratio exhibits how close the results of the proposed method are to the results of global approach. The value of utility_ratio is analyzed using sequential workflows by varying two parameters, namely number of service classes and number of services per service class. In global approach, initially one service from each service class is selected and a Composite Service (CS) is formed using the selected services. Then, the QoS of the CS is computed. The computed QoS is tested against the given global constraint. If a composite service fulfills the given global constraint, the utility of the composite service is computed. The utility of a composite service, denoted by \(U_{CS}\), is computed as in [2], using (26)
In (26), \(U_{CS}\) represents the utility obtained using global approach, \(Q_{{\mathrm{max}} }^{\prime }(k)\) represents sum of maximum values of \(k\) th attribute of all service classes involved in implementing a workflow and \(Q_{\mathrm{min}}^{\prime } (k)\) represents the sum of minimum values of \(k\)th attribute of all service classes involved in implementing a workflow, \(q_{k}(CS)\) denotes value of \(k\) th attribute of CS and \(w_{k}\) represents the weight of \(k\) th attribute. In the proposed approach, the utility of an \(i\)th service of \(j\)th service class is computed using (25). The service which gives the highest utility is selected as the best available service for a service class. Let \(s_{jb}\) denote the best available service of \(j\)th service class. Let \(U(s_{jb})\) denote the utility of the best available service of \(j\)th service class. The utility of the best available service combination of a workflow with ‘n’ service classes, denoted by \(U_{proposed}\), is computed using
The value of utility_ratio is computed using
The value of utility_ratio computed by varying the number of service classes (with number of services per service class is fixed as 10) is given in Table 13.
From Table 13, the average value of utility_ratio by varying the number of service classes is taken as 99.5 %. Utility obtained using proposed and local approaches by varying number of service classes from 2 to 12 is given in Fig. 17.

Utility obtained using global and proposed approaches by varying number of service classes
Further, the value of utility_ratio by varying the number of services in a service class from 200 to 2,000 in steps of 200 is given in Table 14. Utility obtained using proposed and local approaches by varying the number of services from 200 to 2,000 (with number of service classes fixed as 5) is given in Fig. 18. The average utility_ratio by varying the number of services is found to be 99.86 %.

Utility obtained using global and proposed approaches by varying number of services
From the comparison results given in Tables 13 and 14, the accuracy of the proposed approach is found to be good.
4.3.1 Computation time of proposed approach versus global approach
As global approach is taken as the standard to validate the correctness of the proposed approach, the computational performance of proposed approach is also compared with global approach with respect to number of service classes and number of services for varied number of QoS constraints/attributes.
Firstly, by fixing the number of services classes (denoted by ‘n’) and number of services per service class (denoted by ‘\(l\)’), the computation time of global and proposed approaches for varied number of QoS constraints is found out as in Table 15. During this test, ‘n’ is kept as 5 and \(l\) is kept as 100. The number of constraints is varied from 1 to 3. QoS constraints, namely response time, cost and latency, are used. The graphs showing the computation time of global and proposed approaches with respect to number of constraints are given in Figs. 19 and 20, respectively.

Time taken by global approach for varied number of QoS constraints (by fixing n and \(l\))

Time taken by proposed approach for varied number of QoS constraints (by fixing n and \(l\))
From Figs. 19 and 20, in both approaches, the computation time increases linearly with respect to number of QoS constraints. Further, from Table 15, the computation time of proposed approach with respect to number of QoS constraints (for a fixed number of service classes and fixed number of services) is found to vary very slowly (from 10 to 14\(\upmu \)s) when compared to that of global approach (from 221 to 360 s).
Secondly, the computation time of global and proposed approaches with respect to number of services for varied number of QoS constraints is given in Table 16. During testing, the number of service classes is fixed as 5. The number of services per service class is varied from 40 to 110. QoS constraints, namely response time, cost and latency, are used. The graphs showing the computation time of global and proposed approaches with respect to number of services for varied number of QoS constraints are given in Figs. 21 and 22, respectively.

Time taken by global approach with respect to number of services for varied number of QoS constraints

Time taken by proposed approach for different m by varying number of services
From Table 16 and Fig. 21, the computation time of global approach with respect to number of services for varied number of QoS constraints is found to increase exponentially, and the cause of exponential time characteristics arises from the number of combinations involved in selection (and not from number of QoS constraints as seen from Fig. 19), whereas from Table 16 and Fig. 22, the computation time of proposed approach with respect to number of services for varied number of QoS constraints is found to increase very slowly.
Thirdly, the computational performance of proposed approach is compared with global approach with respect to number of service classes for varied number of QoS constraints as in Table 17. The number of services is fixed as 20. Further, the graphs showing the computation time of global and proposed approaches with respect to number of service classes are given in Figs. 23 and 24, respectively.

Time taken by global approach by varying number of service classes for varied number of QoS constraints

Time taken by proposed approach by varying number of service classes for varied number of QoS constraints
From Table 17 and Fig. 23, the computation time of global approach is found to increase exponentially with number of service classes. The exponential increase is due to exponential increase in number of combinations to be searched for selection, whereas from Table 17 and Fig. 24, the computation time of proposed approach is found to increase very slowly with respect to number of service classes.
4.4 Comparison of the proposed approach with existing local approaches
To compare the computation time of the proposed approach with other existing approaches, a comparative study is undertaken as follows.
-
Comparison with Alrifai et al. Approach—there are a set of approaches [2, 13, 14, 18, 23, 25] with same method of decomposition for QoS-based local service selection. The method of decomposing constraints of [13, 14, 18, 23, 25] is based on [2]. Hence, at first, Alrifai et al. [2] has been chosen to compare with the proposed approach.
-
Comparison with Lianyong Qi et al. Approach—the method proposed by Lianyong Qi et al. in [21] is similar to [2], but it reduces the candidate search space of composition with a heuristic solution called Local Optimization and Enumeration Method, which filters the numerous candidates, say ‘\(l\)’ candidates corresponding to each task into ‘\(h\)’ promising candidates. So, the method [21] is chosen for comparison with the proposed approach.
-
Comparison with Freddy Lecue et al. Approach—the approach proposed in [15] addresses the scalability issue of service composition by selecting composition that satisfies a set of constraints rather than the one which produces optimal utility. So, we propose to compare the proposed approach with [15] also.
-
Comparison of time taken for computing QoS for an OR pattern— further, the proposed approach uses a new method of computing QoS for OR pattern in contrast to the approaches such as [9, 15, 19, 22], which use the conventional method of computing expected values of QoS attributes of an OR pattern. But these approaches do not focus on time taken for computing QoS values, an experiment is conducted to compare the time taken for computing QoS values of an OR pattern using conventional and the proposed methods.
Further, the detailed experimentation is discussed below.
4.4.1 Proposed approach versus Alrifai et al. approach
Two experiments have been conducted for comparison. The experimental conditions similar to Alrifai et al. approach [2] have been used for the comparative study. Let ‘n’ denote the number of service classes and ‘m’ denote the number of constraints. In the first experiment, the values of ‘n’ and ‘m’ are fixed as 10 and 3, respectively, and the number of services in each service class is varied from 100 to 2,000 in steps of 100. The computation time of the proposed approach, denoted by \(t_{proposed}\), is computed using (29).
The computation time of the proposed approach with respect to number of services in a service class is given in Table 18. From Table 18, it is found that the time taken for decomposing constraints (\(t_{decompose})\) is only 0.009 ms and it is independent of number of services in a service class. The time involved in identifying the best available service(\(t_{select})\) is ranging from 0.005 to 0.066 ms when the number of services is varied from 100 to 2,000. The computation time of the proposed approach with respect to number of services is compared to values interpreted from Alrifai et al. [2], and the comparison results of Experiment 1 are given in Table 19.
From Table 19, the increase in computation time of the proposed approach with number of services is found to be very less and negligible when compared to that of Alrifai et al. [2]. Here, the drastic reduction in computation of local constraints arises from the method of computing local constraints which is based on extreme values of QoS attributes of service classes rather than the values of QoS attributes of individual services.
In the second experiment, the number of services per service class, denoted by ‘\(l\)’, is fixed as 500. The value of ‘m’ is fixed as 3. The value of ‘n’ is varied from 10 to 100 in steps of 10. The computation time of the proposed approach with respect to number of service classes is shown in Table 20.
The computation time of the proposed approach with respect to number of service classes is compared with the values interpreted from Alrifai et al. [2]. The comparison results of Experiment 2 are given in Table 21.
From Table 21, it is understood that the time variation in Alrifai et al. [2] ranges from approximately 500 ms to approximately 20,000 ms, whereas time variation in the proposed approach ranges from 0.029 to 0.070 ms. The time variation in the proposed approach is very small and negligible when compared to that of Alrifai et al. [2]. Here also, the drastic reduction in computation of local constraints is due to the method of computing constraints, which is based on extreme values of QoS classes rather than QoS values of individual services.
4.4.2 Proposed approach versus Lianyong Qi et al. approach
The method proposed in [21] is similar to [2], but it reduces the candidate search space of composition with a heuristic solution called Local Optimization and Enumeration Method, which filters the numerous candidates, say, ‘\(l\)’ candidates corresponding to each task into ‘\(h\)’ promising candidates. For an \(i\)th task, the range of say \(j\)th attribute is divided into‘d’ quality levels, namely \(q_{ij}^{1}, q_{ij}^{2}, {\ldots } q_{ij}^{d}\) similar to [2]. Each level \(q_{ij}^{z}{\vert }1\le z\le d\) represents a local constraint. For negative attributes, smaller \(q_{ij}^{z}\) produces more satisfactory utility to users, and for positive attributes, larger \(q_{ij}^{z}\) produces more satisfactory utility to users. Hence, in this method, initially for negative attributes, the constraints are fixed as [\(0-q_{ij}^{z}\)], and for positive attributes, the constraints are fixed as [\(q_{ij}^{z}-\infty \)], and promising candidates are chosen with these constraints. Then, the constraints are reassigned from their previous levels to next level (i.e., for negative attributes, [\(0-q_{ij}^{z+1}\)], and for positive attributes, [\(q_{ij}^{z-1}-\infty \)]) to find out further promising candidates. The process is repeated to obtain ‘\(h\)’ promising candidates. Then, with ‘\(h\)’candidates in each task, near-to-optimal selection is made. In this manner, in [21] the search space is reduced from ‘\(l\)’ candidates to ‘\(h\)’ promising candidates. Further, the approach presented in [21] handles sequential workflows.
To compare the computation time of proposed approach with that of [21], experimental conditions similar to Lianyong Qi et al. [21] have been used. Let ‘n’ denote the number of service classes and ‘m’ denote the number of constraints. The value of ‘n’ is varied from 5 to 25. The value of ‘m’ is fixed as 4. The value of ‘\(l\)’ is fixed as 50. The computation time of the proposed approach \(t_{proposed}\) is computed using (29) and given in Table 22.
The computation time of the proposed approach with respect to number of service classes is compared with values interpreted from Lianyong Qi et al et al. [21], and the comparison results are given in Table 23.
Another experiment is conducted to compare the computation time of the proposed approach with Lianyong Qi et al. approach by varying the number of services from 50 to 500 and keeping the number of service classes as 5 and number of constraints as 4. Computation time of the proposed approach obtained by varying number of services with experimental conditions similar to Lianyong Qi et al. approach [21] is given in Table 24.
The computation time of the proposed approach with respect to number of services is compared with values interpreted from Lianyong Qi et al. [21], and the comparison results are given in Table 25.
When we compare the computation time of Alrifai et al. method [2] with Lianyong Qi et al method [21], the computation time of Lianyong Qi et al. method [21] with respect to number of services is found to be better than Alrifai et al. method [2]. The reason must be Lianyong Qi et al. method [21] selects appropriate service combination from ‘\(h\)’ promising candidates rather than from ‘\(l\)’ candidates as in Alrifai et al. method [2]. Still, the computation time of Lianyong Qi et al. approach [21] with respect to number of service classes is quite high of the order of \(10^{3}\) ms, whereas the proposed method outperforms both Alrifai et al. method [2] and Lianyong Qi et al. method [21] in terms of computation time in our experimentation with given set of data (please refer Tables 19, 21, 23 and 25). The primary reason for low computation time is that the decomposition phase of proposed method is totally independent of number of services in a service class (method of computing local constraints is based on extreme values of QoS attributes of service classes). Only the selection phase of the proposed method has to scan the QoS values of individual services, which is inevitable in any method of selection.
4.4.3 Proposed approach versus Freddy Lecue et al. approach
In [15], Freddy Lecue et al. have addressed the scalability issue of service composition by selecting composition that satisfies a set of constraints rather than the one that produces optimal utility. The authors modeled service selection as Constraint Satisfaction Problem (CSP) and solved it using stochastic search method. While searching the method uses Hill Climbing algorithm with two functions, namely an evaluation function and an adjacency function. Evaluation function is a function of both quality of semantic link and QoS attributes of services.
Consider a composition \(c\). Let \(f(c)\) denote the value of evaluation function of \(c\). The value of \(f(c)\) is computed using
In (30), \(Q_{cd}(c)\) denotes the common description rate of \(c\) (this factor estimates the rate of descriptions which ensure a correct data flow among the services of the composition), \(Q_{m}(c)\) denotes the matching quality of \(c\) (this factor ranges from 0 to 1 based on the standard semantic relations, namely exact, plugin, subsume and intersection), \(Q_{pr}(c)\) denotes quality of price of \(c\) and \(Q_{t}(c)\) denotes the quality of execution time of \(c\). While searching, the algorithm begins with a random composition \(c_{final}\), and this composition will be replaced by the other combination if the other is adjacent to \(c_{final}\). Here, two compositions are said to adjacent if they differ in exactly one assignment. Reassigning of composition takes place till the algorithm finds a combination that satisfies all constraints.
In Freddy Lecue et al. approach [15], service selection is based on both functional and non-functional characteristics of services. But the proposed work focuses only on the non-functional aspect. Hence, the time taken in selecting services based on non-functional aspect is compared with that of the proposed work. Further, during non-functional selection in order to achieve low computation time, Freddy Lecue et al. approach [15] finds a single solution which satisfies all given constraints rather than selecting optimal one from all solutions.
Experimental setting similar to Freddy Lecue et al. approach [15] has been brought into the proposed approach for comparison. The number of iterations involved in Freddy et al. approach [15] and the proposed approach with respect to number of services classes is given in Table 26. Here, the number of services per service class is taken as 350.
From Table 26, in Freddy Lecue et al. approach [15], the number of iterations required to find the first composition which satisfies the given constraints is found to increase with respect to number of service classes. Experimental results of [15] show that when number of tasks increases from 100 to 200 to 300, the number of iterations is found to increase as \(8\times 10^{4}\), \(16\times 10^{7}\) and \(22\times 10^{11}\), whereas in the proposed approach, the number of iterations to be searched is \(l\times n\) where ‘\(n\)’ denotes the number of service classes and ‘\(l\)’ denotes the number of services. With ‘\(l\)’ fixed as 350, and when the value of ‘\(n\)’ is increased from 100 to 200 to 300, the number of combinations is found to vary as 35,000, 70,000 and 105,000 which is a linear increase. Correspondingly, from Table 26, the computation time of the proposed approach is found to be very low when compared to Freddy Lecue et al. approach [15].
Further, how the computation time of the methods varies with respect to number of services per service class is given in Table 27. Here, the number of service classes is fixed as 300.
From Table 27, when number of services per task is increased from 280 to 500, the computation time of Freddy Lecue et al. Approach [15] is found to vary from around 5,000 ms to around 13,000 ms, whereas the computation time of the proposed approach varies from 91 to 104 \(\upmu \)s. The increase in computation time of the proposed approach with respect to number of service is found to be negligible when compared with Freddy Lecue et al. Approach [15].
4.4.4 Computation time for finding QoS of an OR pattern
Time taken for computing QoS for an OR pattern using conventional method and proposed method is computed by varying the number of sequential paths in OR pattern from 2 to 10 and given in Table 28 and Fig. 25. Each sequential path contains 2 service classes.

Time taken to compute QoS for an OR pattern using conventional and proposed methods
From Table 28 and Fig. 25, it is seen that there is no much difference in time taken while computing QoS using the conventional and proposed methods. In both methods, QoS value of each sequential path is obtained by aggregating the QoS values of tasks present in that sequential path. In conventional method, the QoS value of OR pattern is obtained by adding the values which are obtained by multiplying QoS of each sequential path by the concerned path’s probability, according to (3). In proposed method, the QoS value of the pattern is obtained by finding the maximum of QoS values of all sequential paths according to (4). From Table 28, under the given experimental settings, it is found that there is no much time difference while computing QoS according to (3) and (4) . But the proposed method of computing QoS ensures 100 % guarantee for successful execution to each path of OR pattern when it is given a chance for execution with the constraints are at least equal to minimum time requirement of the pattern, whereas the conventional method fails to provide 100 % guarantee for successful execution.
4.5 Findings
In this work, the problem of QoS-based service selection for real-time applications with combinational workflow having most common execution patterns, AND, OR and Loop is addressed. As the method of decomposing constraints is based on the extreme values of QoS attributes of service classes and the given global constraints, the method becomes independent of number of services in a service class. This feature of independence is unique. The proposed method of decomposing constraints is found to have very low computation time when compared to other approaches. From a series of experiments, it is found that the time characteristics of the method and utility_ratio are found to be encouraging with a typical test collection.
In general, any local selection approach reduces the time complexity of global approach by dividing the workflow level selection into a set of task-level selections. Using local constraints, the local selection approach solves the task-level selections quickly. Also, as the aggregation of local constraints is always equal to the global constraints, if a selection satisfies local constraints, it implies that the selection meets the global constraints. But in some situations, a local selection approach fails to detect a feasible solution that may satisfy the given global constraints but not the simultaneous fulfillment of local constraints. In such situations, more than one QoS attribute will be involved. This limitation is illustrated with a typical dataset given in Table 29.
The dataset contains 5 service classes with each service class containing 10 services. Two constraints, namely response time and cost (most commonly used negative attributes), are considered for discussion. The first column of each row denotes service ID. An \(i\)th row in Table 29 gives the details of an \(i\)th service in different service classes (i.e., from service class-1 to service class-5). The values of response time and cost of all services in different service classes are given in the dataset.
Now, consider a query with QoS constraints “response time \(<=1000\) and cost \(<=800\)”. For the given QoS constraints, the local constraints of response time and the local constraints of cost for different service classes are computed as per the proposed method, and the values are given in Table 30.
For the above query, the global approach identifies a service combination, consisting of 9th, 10th, 3rd, 6th and 5th services from 1st, 2nd, 3rd, 4th and 5th service classes, respectively, with utility 0.966705 as the best available service combination.
The local approach identifies the best available service from each service class subject to local constraints. It identifies 9th, 10th, 6th and 5th services as the best available services from 1st, 2nd, 4th and 5th service classes, respectively. Here, this approach identifies no best available service from service class-3 as there is no single service in the service class-3 that satisfying both the local constraints of response time and cost simultaneously.
When local approach finds no best available service for a particular service class, then the local constraints of QoS attributes of that service class can be relaxed (provided the relaxed constraint should satisfy the global constraints) to discover any existing feasible solution. A heuristic approach is suggested for relaxing the local constraints of service class so that efficiency of the local selection approach will be improved. The heuristic approach is illustrated with two constraints, namely response time and cost.
Let \(Q_{k}^{global}\) denote the global constraint of \(k\)th attribute. Let \(Q_{local}(j, k)\) denote the local constraint of \(k\)th attribute of \(j\)th service class. Let \(Q_{k}^{assigned}\) denote the sum of \(k\)th attribute of all selected best available services. The value of \(Q_{k}^{assigned}\) is computed using (31)
In (31), \(s_{jb}\) denotes the best available service of \(j\)th service class and \(q_{k}(s_{jb})\) denotes the \(k\)th attribute of \(s_{jb}\).
Following are the steps used to relax local constraints of a service class for which the best available service is null. Consider a service class \(S_{j}\) for which \(s_{jb}\) is null.
Step 1: Find a set of services from \(S_{j}\) which meet at least one of the given local constraints (i.e., either response time or cost). Let this set of services is denoted by \(S_{initial}\).
Step 2: Find all services from \(S_{initial}\) which meet the constraint of higher priority attribute. Let these services would form the set \(S_{candidate.}\) Now, the services in \(S_{candidate}\) satisfy the constraints of attribute with higher priority but may not satisfy the constraints of the attribute with lower priority.
Step 3: Consider \(l\)th attribute as the low priority attribute. Find the service which has minimum value for \(l\)th attribute from \(S_{candidate}\). Let this value be \(Q_{min}(l)\).
Step 4: Find the remaining or balance value of \(l\)th attribute, denoted by \(Q_{l}^{balance}\) after assigning \(l\)th attribute to all the best available services using (32). In (32), \(Q_{l}^{global}\) denotes the global constraint of \(l\)th attribute and \(Q_{l}^{assigned}\) denote the sum of \(l\)th attribute of the best available services of all service classes implementing the workflow (for which \(s_{jp}\ne null\)).
Step 5: Let \(Q_{local}(j, l)\) denote the local constraint of \(l\)th attribute of \(j\)th service class. If \(Q_{l}^{balance}>Q_{min}(l)\) relax \(Q_{local}(j,l)\) using (33)
When the local constraint of \(l\)th attribute is relaxed for \(j\)th service class, then the value of \(Q_{l}^{balance}\) should be updated according to
Step 6: After constraints are relaxed, the services which satisfy the simultaneous fulfillment of both the constraints of attribute with higher priority and attribute with lower priority are identified. From the resulting set, the service having the minimum value for higher priority attribute will be chosen as the best available service.
The steps are applied to the above example as follows. For the given query, the local selection approach produces null for the best available service of service class-3. The set \(S_{initial}\) is constructed with 2nd, 3rd, 5th, 6th, 8th and 9th services of service class-3. Let us consider response time (first attribute) and cost (second attribute) as the high and low priority attributes, respectively. Now, the set of services that satisfy the constraint of response time are extracted from \(S_{initial}\). This set forms \(S_{candidate}\) and \(S_{candidate}\) contains 2nd, 3rd, 5th, 6th and 8th services from service class-3. There are two services in this set that has minimum value for cost (217). They are second and third services of service class-3. The values of \(Q_{2}^{assigned}\) and \(Q_{2}^{balance}\) are found as 376 and 424, respectively. Here, it is found that \(Q_{2}^{balance}>Q_{\mathrm{min}}\)(2) and hence, the constraint of cost is relaxed from 146 to 217 for service class-3. The value of \(Q_{2}^{balance}\) is updated as 207. Now, both the services (second and third services) in service class-3 satisfy the local constraint of cost. Of these two services, the third service is selected as the best available service for service class-3 as it has minimum value for response time. With this heuristic approach, the best available service combination identified by the local approach is given as 9th, 10th, 3rd, 6th and 5th services from 1st, 2nd, 3rd, 4th and 5th service classes, respectively, with utility score 0.966705.
Thus, when a local approach finds no best available service from a service class, the heuristic approach relaxes the local constraints of such service class and tries to identify feasible service.
An empirical study has been taken up with the following objectives
-
To find the utility for different queries and compare it with that of global approach
-
To find the efficiency of the proposed approach and compare it with that of global approach
-
To find how heuristics-based constraint relaxation improves the efficiency of the proposed approach
-
To find how user’s trade-off among various QoS attributes improves the efficiency of the proposed approach.
Here, efficiency is defined as the ratio of number of queries answered within expected time to the number of queries posted within expected time. Efficiency is expressed in %.
Toward the study, an experiment has been conducted with 5 services classes, each containing 100 services. Response time and cost have been chosen as the interested QoS attributes. The values of response time and cost of all services of different service classes are given in Appendix C (supplementary material) for reference. Consider user’s QoS preferences are given as 80 % preference to response time and 20 % preference to cost. Let grt and gc denote the global constraint of response time and cost, respectively. The availability of appropriate service combination is mainly determined by user’s constraints, QoS preferences and the values of QoS attributes of individual services. To find efficiency of different approaches, the QoS values of individual services are kept same for all approaches. The constraints are based on extreme values of QoS of service classes. The extreme values of response time and cost of different service classes are given in Table 31.
Now, the queries are constructed with different QoS constraints that fall between the ranges of aggregated QoS of services. Seventy-five queries are constructed with constraint of response time and constraint of cost ranging from 4,000 to 300. Constraints are decreased in steps of 50. For each query, the utility of the proposed approach is computed and given in Appendix D (supplementary material) for reference. For comparison purpose, for each query the utility obtained using global approach is also given in Appendix D (supplementary material). Global method is found to yield answers for constraints in the range \(4{,}000\ge grt\ge 300\) and \(4{,}000\ge gc\ge 300\). The global approach is found to answer 73 queries out of 75 queries, and its efficiency is found to be 97.3 %. The proposed approach is found to answer 66 queries. The QoS values and utility values obtained for these 66 queries have been compared to the QoS values and utility values obtained using global approach as given in Tables 32 and 33.
From experimentation, the proposed approach is found to answer the queries for the constraints in the range, \(4000\ge grt\ge 750\) and \(4000\ge gc\ge 750\). When the user’s constraints are very close to the minimum values of QoS attributes, simultaneous fulfillment of local constraints may not get fulfilled. In our example, when \(700\ge grt\ge 300\) and \(700\ge gc\ge 300\), the proposed local approach fails to meet the simultaneous fulfillment of local constraints. Now, the cost constraint is relaxed using heuristics method of constraint relaxation subject to the condition that the aggregation of local constraints of cost always satisfies the given global constraint of cost. When the proposed approach is combined with this heuristics-based constraint relaxation, feasible solutions are obtained for constraints in the range \(700\ge grt>450\) and \(700\ge gc >450\). This kind of constraint relaxation may not find a feasible solution when relaxation fails to satisfy the global constraint. In this example, when \(450 \ge grt\ge 300\) and \(450\ge gc\ge 300\), local approach in combination with heuristics fails to find a solution, because constraints cannot be relaxed beyond a particular condition as the relaxed constraints violate the global constraints. In this range, user’s trade-off among QoS attributes are considered. When we consider user’s trade-off among various attributes, all QoS constraints will not be fulfilled. In this example, two constraints are considered. Consider that the constraint of response time is given higher priority, and it is a hard constraint (which much be definitely satisfied) than the constraint of cost, a soft constraint (which may or may not be satisfied). While selecting services, if no solution is found, then the constraint having lower priority (i.e., cost) will be compromised and ultimately the cost constraint may not be met. In this example, when \(450\ge grt \ge 300\) and \(450 \ge gc \ge 300\), local approach in combination with user’s trade-off helps in finding a feasible solution. The number of queries answered by (i) the proposed approach, (ii) proposed approach in combination with heuristics-based constraint relaxation (when proposed method fails) and (iii) the proposed method in combination with user’s trade-off when both proposed approach and proposed in combination with heuristics fail are computed. The efficiency of the above approaches is calculated using (35). The number of queries answered by different approaches and the efficiency of the approaches are given in Table 34. The efficiency of the above approaches is given in Fig. 26.

Efficiency of proposed method, proposed method with heuristics and proposed method with user’s trade-off
From Table 34 and Fig. 26, the efficiency of the proposed method is found to be 88 %. When it is combined with heuristics-based constraint relaxation, its efficiency is found to increase by 7 %. Further, when both proposed approach and proposed approach with heuristics fail, user’s trade-off improves the efficiency of the approach by 5 %. Also, while finding best services, there may be little probability to obtain more than one service combinations as best service combination. This can occur when more than one service combination produces the same utility. If at all more than one service combinations are obtained as best combinations, one of the combinations will be chosen for composition while others can be considered as alternatives to the chosen one which may fail to deliver the expected task due to runtime errors.
5 Conclusion
This paper presents a newly developed local selection methodology for selecting best available service combination for a given workflow having most common business structures AND, OR and Loop based on QoS. The methodology has been implemented and tested by a series of experiments. This methodology is found to yield excellent time characteristics and utility_ratio when compared with existing approaches. This paper describes a new method for computing response time of OR execution pattern, which guarantees 100 % successful execution of every path in an OR unit when the path is given a chance for execution. But the existing approaches assign response time to an OR unit based on ‘expected response time’ of an OR unit in which all the paths of an OR unit are not guaranteed for successful execution when a chance is given for execution. In this case, even a workflow may fail to get executed when any one of its OR path with insufficient time (assigned as per expected response time) gets a chance to execute. The proposed methodology alleviates this shortcoming.
From experiments, it is found that the retrieval of QoS values of services from its storage/repository to a concerned service application is found to consume time of the order of few tens of milliseconds, and it is recommended that the retrieval of QoS must be done prior to querying for quick selection. The method identifies a service combination which is the best among the available feasible combinations rather than identifying optimal combination, which is not certain to exist in real situations. Further, the methodology suggests a heuristic approach to relax local constraints and to improve the efficiency of local selection approach. The experimental evaluations show significant improvement in computation time, utility_ratio and detection efficiency while identifying the best available services for composition. This is especially useful for applications with real-time composition.
References
Alrifai M, Risse T (2008) Efficient QoS-aware service composition. In: The proceedings of the 3rd workshop on emerging web services technology. IEEE, Los Alamitos, CA, pp 60–70
Alrifai M, Risse T (2009) Combining global optimization with local selection for efficient QoS-aware service composition. In: The proceedings of the 18th international conference on World Wide Web, ACM, pp 881–890
Alrifai M, Risse T, Dolog P, Nejdl W (2009) A scalable approach for QoS-based web service selection. In: Service-oriented computing, 2008 workshops. Springer, Berlin, pp 190–199
Alrifai M, Skoutas D, Risse T (2010) Selecting skyline services for QoS-based web service composition. In: The proceedings of the 19th international world wide web conference. ACM, North Carolina, USA, pp 11–20
Anselmi J, Ardagna D, Cremonesi P (2007) A QoS-based selection approach of autonomic grid services. In: The proceedings of the workshop on service-oriented computing performance: aspects, issues and approaches. ACM Press, pp 1–8
Ardagna D, Pernici B (2007) Adaptive service composition in flexible processes. IEEE Trans Softw Eng 33(6):369–384
Ardagna D, Pernici B (2005) Global and local QoS constraints guarantee in web service selection. In: The proceedings of IEEE international conference on web services. (FL, USA). IEEE Computer Society, pp 805–806
Canora G, Esposito R (2004) A lightweight approach for QoS-aware service composition. In: Proceedings of 2nd international conference on service oriented computing. New York, pp 37–46
Cardoso J, Sheth AP, Miler JA, Arnold J, Kochut K (2004) Quality of service for workflows and web service processes. J Web Semant 1(3):281–308
Chen Z, Wang H, Pan P (2010) An approach to optimal web service composition based on QoS and user preferences. In: International joint conference on artificial intelligence, IEEE, Jinan, China, pp 96–101
Gao Y, Zhang B, Na J, Yang L, Dai Y, Gong Q (2006) Optimal selection of web services with end-to-end constraints. In: The proceedings of first international multi-symposiums on computer and computational sciences, IEEE, China, pp 460–467
Hong L, Hu J (2009) A multi-dimension QoS based local service selection model for service composition. J Netw, 4(5), Academy Publisher, pp 351–358
Jin J, Cao Y, Zhu D, Pu X, Yang M (2010) A structure-wise service selection approach for efficient service composition. In: IEEE International conference on E-business engineering (Beijing, China), pp 256–261
Jin J, Zhang Y, Cao Y, Zhou R (2010) An enhanced QoS decomposition approach for efficient service composition. In: The proceedings of the fifth IEEE international conference on computer science & education, (Beijing, China), pp 1680–1684
Lecue F, Mehandijiev N (2009) Towards scalability of quality driven semantic web service composition. In: IEEE International conference on web services, IEEE Computer Society, Los Angeles, USA, pp 469–476
Li W-J, Li X, Liang X-J, Zhou X-C (2011) QoS-driven service composition with multiple flow structures, In: The proceedings of IEEE international conference on services computing, IEEE Computer Society, Washington DC, USA, pp 362–369
Liangzhao Zeng, Boualem Benatallah (2004) A QoS-aware middleware for web service composition. IEEE Trans Softw Eng 30(5):311–327
Li J, Zhao Y, Liu M, Sun H, Ma D (2010) An adaptive heuristic approach for distributed QoS-based service composition. In: IEEE symposium on computers and communications, Beijing, China, pp 687–694
Menasce DA (2004) Composing web services: a QoS view. IEEE Internet Comput 8(6):88–90
Oster ZJ, Santhanam GR, Basu S (2011) Identifying optimal composite services by decomposing the service composition problem. IEEE international conference on web services, (USA), pp 267–274
Qi L, Tang Y, Dou W, Chen J (2010) Combining local optimization and enumeration for QoS-aware web service composition. In: IEEE international conference on web services, IEEE Computer Society, pp 34–41
Senivongse T, Wongsawangpanich N (2011) Composing services of different granularity and varying QoS using genetic algorithm. In: The proceedings of World Congress on engineering and computer science, International Association of Engineers, San Francisco, USA, vol. I, pp 388–393
Sherry SX, Zhao J, Wang H, Winter R, Zhao JL, Aier S (2010) A negotiation based approach for service composition. In: DESRIST 2010: LNCS 6105, Springer, Berlin, pp 381–393
Xiong PC, Fan YS, Zhou MC (2008) QoS-aware web service configuration. IEEE Trans Syst Man Cybern: Part A 38(4):888–895
Yanwei Z, Hong N, Haojiang D, Lei L (2010) A dynamic web services selection based on decomposition of global QoS constraints. In: The proceedings of IEEE youth conference on information computing and telecommunications. Beijing, China
Yoon KP, Hwang CL (1995) Multiple attribute decision making: an introduction (Quantitative Applications in the Social Sciences). Sage Publications
Yuan-sheng L, Zhen-Hong T, Lu-Lu Y, Hong-Tao X, Zhi-hong X, Zhi-feng W (2010) A QoS-based web service dynamic composition framework. In: The proceedings of 9th international symposium on distributed computing and applications to business, engineering and science, (Hong Kong), pp 188–192
Yu T, Lin KJ (2005) A broker-based framework for QoS-aware web service composition. In: IEEE international conference on eTechnology eCommerce and eService, IEEE, Hong Kong, pp 22–29
Yu T, Zhang Y, Lin K-J (2007) Efficient algorithms for web services selection with end-to-end QoS constraints. ACM Transactions on Web, ACM publication, Vol. 1, No. 1, Article 6
Zeng L, Benatallah B, Dumas M, Kalagnanam J, Sheng QZ (2003) Quality driven web services composition. In: The proceedings of the 12th international conference on World Wide Web, ACM Press, Hungary, pp 411–421
Zhang W, Carl CK, Feng T, Jiang H-Y (2010) QoS-based dynamic web service composition with ant colony optimization. In: 34th annual IEEE computer software and applications conference. Seoul, Korea, pp 493–502
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article
Cite this article
Surianarayanan, C., Ganapathy, G. & Ramasamy, M.S. An approach for selecting best available services through a new method of decomposing QoS constraints. SOCA 9, 107–138 (2015). https://doi.org/10.1007/s11761-014-0154-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11761-014-0154-x