
Abstract
This paper studies two kinds of synchronization between two discrete-time networks with time delays, including inner synchronization within each network and outer synchronization between two networks. Based on Lyapunov stability theory and linear matrix inequality (LMI), sufficient conditions for two discrete-time networks to be asymptotic stability are derived in terms of LMI. Finally numerical examples are given to illustrate the effectiveness of our derived results. The theoretical understanding provides insights into the dynamics of two or more neural networks with appropriate couplings.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The human brain has been described as a large, sparse, complex network consisting of a hierarchy of interacting elements on different levels, of different functions and different interconnections. There are at least three basic levels in the hierarchical structure: the microscopic level of interacting neurons, mesoscopic level of mini-columns and local neural circuits, and macroscopic level of large-scale organization of the brain areas (Zhou et al. 2007). While details at the first two levels are still largely missing, extensive information has been collected about the latter level in the brain of animals, such as cats and macaque monkeys (Stam and Reijneveld 2007). Based on the cortical connectivity of mammalian brains, the authors investigated the synchronization dynamics on the corticocortical network of the cat by modeling each node (cortical area) of the network with a sub-network of interacting excitable neurons, and understanding the relationship between structural and functional connectivity is of crucial importance in neuroscience (Zhou et al. 2007).
Over the years, the researchers in physics, biology, mathematics and computer science dedicate to the study of complex networks (Albert and Barabási 2002). The complexity of networks lies in two aspects: topological structures and node dynamics, which are closely linked to each other. Recently, using the approach of complex network analysis, the studies in neuroscience have received a great deal of research attention (Bullmore and Sporns 2009). For example, the cerebral cortex network exhibits small-world (Watts and Strogatz 1998) attributes, characterized by the presence of abundant clustering of connections combined with short average distances between neuronal elements (Sporns and Zwi 2004). Functional brain networks (connecting correlated human brain sites) extracted by the functional magnetic resonance imaging are of scale-free (Barabási and Albert 1999) and small-world characteristics (Eguíluz et al. 2005). In the literature (Liu et al. 2008), the authors found that the brain functional networks had efficient small-world properties in the healthy subjects; whereas these properties were disrupted in the patients with schizophrenia.
During the studies on complex networks, our concern is to know the impact of topological structures on the dynamics of the networks. For example, synchronization of coupled oscillators is one of the crucial dynamical behaviors on complex networks, for its relevance in neural systems. The observations of synchronous neural activity (Melloni et al. 2007; Gray 1944; Kanamaru 2006; Börgers and Kopell 2003; Mancilla et al. 2007; Wang and Jiao 2006) in the central nervous system have encouraged a great deal of theoretical work on synchronization in coupled neural networks, which is beneficial to explore the activities of the brain.
Low-dimensional dynamics in high-dimensional networks is a ubiquitous phenomenon observed in various physical, chemical, and biological problems. Node dynamics in a network can be various depending on the context of discussion, often taken as the neuron models or chaos dynamics etc. While studying the synchronized motion in networks, synchronizing all the nodes is an interesting thing (Liang et al. 2008; Torikai and Saito 2004). Synchronization inside a coupled network, or called “inner synchronization” for convenience, has been intensively and extensively. Besides this kind of network synchronization, outer synchronization, i.e., synchronization between two coupled networks has been studied in the literature (Li et al. 2007), aiming at the study of dynamics between coupled networks.
Time delays commonly exist in biological systems since the finite speed of signal transmission over a distance gives rise to finite time delay, which plays an importance role in the stability of synchronization (He and Cao 2008; Jirsa 2008; Masoller et al. 2009; Ramirez et al. 2009). For instance, time delay enhancing neuron synchrony, and cortical neurons synchronized by time delay feedback, for details, see (Dhamala et al. 2004; Landsman and Schwartz 2007). For two coupled networks, the signals from one network to another often exist delays due to the distance. Therefore, motivated by the synchronization in neural systems which is very relevant to cognition, and the impact of topological structures and the delays on the dynamics of the networks. This paper mainly investigates the synchronization between two coupled networks with time delays by using Lyapunov functional and LMI technique which is used frequently for its easily being verified. A criterion is derived to guarantee the asymptotic stability within each network. Two numerical examples are also given to verify the effectiveness of our obtained results.
Notation: Throughout this paper, the following notations always work. A T denotes the transpose of a matrix A. ||A|| denotes certain matrix norm. R n denotes the n dimensional Euclidean space. R n×m is the set of all n × m real matrices. I denotes the identity matrix with appropriate dimensions. The notation A > 0 (respectively, A < 0) means that the matrix A is positive (negative) definite, that is the eigenvalues of A are positive (respectively, negative).
Methods
Model presentation and preliminaries
Based on the dynamical models inside a network, the coupled equations of two networks can be expressed as follows:
where the node dynamical equation is x i (t + 1) = f(x i (t)), i = 1, ..., N x and y j (t + 1) = g(y j (t)), j = 1, ..., N y , respectively, and \(f:R^{n_x}\rightarrow R^{n_x}, g:R^{n_y}\rightarrow R^{n_y}\) are continuously differential functions, x i (y j ) is an n x -dimensional (n y -dimensional) state vector. A = (A im )Nx×Nx and B = (B jk )Ny×Ny represent the coupling configurations of both networks, whose entries A im (B jk ) are defined as follows: if there is a connection between node i and node m (m ≠ i), then set A im (B jk ) > 0, otherwise A im (B jk ) = 0, (m ≠ i); the matrices A and B can be symmetric or asymmetric, but satisfying the sum of every row being zero. \(\Upgamma_1\in R^{n_x\times n_x}, \Upgamma_2\in R^{n_y\times n_y}\) are inner-coupling matrices.
\({\mathbb{C}}_{XY}{(X,Y)}({\mathbb{C}}_{YX}{(Y,X)})\) represents the interaction from network X(Y) to network Y(X). There are lots of active forms between two networks, for instance, communicated by signals, special nodes or bidirectional actions. In Li et al. (2009), the authors choose \({\mathbb{C}}_{XY}{(X,Y)}=(H-{\frac{\partial f(x_i)} {\partial x_i}})(y_i(t)-x_i(t))\) and \({\mathbb{C}}_{YX}{(X,Y)}=0\) to realize outer synchronization, where \(H\in{\mathbb{R}}^{n\times n}\) is a constant Hurwitz matrix.
Here we focus on bidirectional actions and the delay effect, and we choose \({\mathbb{C}}_{XY}(X,Y)=\sum_{j=1}^{N_x} C_{ji}\Upgamma_3 x_i(t-\tau_x)\) and \({\mathbb{C}}_{YX}(Y,X)=\sum_{j=1}^{N_y} D_{ij}\Upgamma_4 y_j(t-\tau_y)\), then the dynamical equations of the network systems are as follows:
where C is an N y × N x dimensional coupling matrix, whose entries (C ji ) represent the intensity of the direct interaction from j in network Y to i in network X, analogously the entries of (D ij ) are same defined as (C ji ). Matrix \(\Upgamma_3(\Upgamma_4)\in R^{n_y\times n_x}(R^{n_x\times n_y})\) is the inner-coupling matrix. τ x ,τ y (positive integers) are time delays between networks. The action sketch between two networks with time delays is shown in Fig. 1.

A simple action sketch between networks X and Y with time delays
For simplicity, we first discuss the effect of interactions and delays on synchronization under the absence of individual connections within each network, i.e., consider
Analysis
Let’s now consider the possibility whether the individual network achieve synchronization, i.e., x 1(t) = ... = x N x (t) = x s (t) and y 1(t) = ... = y N y (t) = y s (t). If there exist such synchronous states, satisfying
without loss of generality, we set μ1 = μ2 = 1.
Thus the synchronized state equations are
Linearizing the synchronous state around x s and y s , we get
where J(t) = Df(x s (t)), W(t) = Dg(y s (t)) are the Jacobians of f(x(t)), g(y(t)) at x s and y s , respectively.
We assume that the (N x + N y )-independent solutions of Eq. 5 can be expressed in the form \(\delta x_i(t)=\Upphi_{x_i} \delta\widetilde{x}(t), i=1,2,\cdots,N_x, \delta y_j(t)=\Upphi_{y_j} \delta\widetilde{y}(t), j=1,2,\cdots,N_y\), where \(\{\Upphi_{x_i}\}, \{\Upphi_{y_j}\}\) are appropriate time-independent scalars. If the dimension of the space vectors given by the values of \(\Upphi_{x_i}, \Upphi_{y_j}(i=1,2,\cdots,N_x, j=1,2,\cdots,N_y)\) is N x + N y , we can see this assumed form include all possible linear solutions of Eq. 5. Substituting this assumption into Eq. 5, yields
In order to make Eq. 6 satisfy all i(j), we require that \(\Upphi^{-1}_{x_i}\sum_{j}D_{ij}\Upphi_{y_j}=\eta_1\), where η1 is independent of i, and \(\Upphi^{-1}_{y_j}\sum_{i}C_{ji}\Upphi_{x_i}=\eta_2\), where η2 is independent of j. Set \(\Upphi_x=(\Upphi_{x_1},\cdots,\Upphi_{x_{N_x}})\) and \(\Upphi_y=(\Upphi_{y_1},\cdots,\Upphi_{y_{N_y}})\). From this, we get \(D\Upphi_y=\eta_1\Upphi_x, C\Upphi_x=\eta_2\Upphi_y\), that is
Substitution Eq. 7 in Eq. 6 we obtain
One particular solution of Eq. 8 is derived when η1 = η2 = λ, then
where λ is the (possibly complex) eigenvalues of the matrix M.
Set \(\eta_1=\lambda\xi, \eta_2=\lambda/\xi,\Upphi_x=\Upphi^*_x, \Upphi_y=\xi\Upphi^*_y\), where ξ is a free parameter. Eq. 7 becomes
which shows the solutions of Eq. 10 contains all the possible solutions of Eq. 7. We rewrite Eq. 8 as
where λ = λ1, λ2, ..., λNx+Ny.
The authors in Sorrentino and Ott (2007) gave the explicit analysis on the spectrum of M, and two forms of constructed matrix M were shown. In the sequel, we utilize the LMI method to obtain a synchronous theorem on inner synchronization within each network.
Results
Theorem 1
Consider network model (3). If there exist two positive matricesP,Q > 0, satisfying
where\(\Uppsi_1=J(t)^TPJ(t)-P+I_{n_x},\Uppsi_2=W(t)^TQW(t)-Q+I_{n_y}, \Uppsi_3=\lambda^2\Upgamma_3^TQ\Upgamma_3-I_{n_x},\Uppsi_4=\lambda^2\Upgamma_4^TP\Upgamma_4-I_{n_y},\)then the network (3) asymptotically synchronizes tox s ,y s defined by the Eq. 4for the fixed delays τ x ,τ y , respectively.
Proof
Consider the Eq. 11. Choose the Lyapunov function as
Therefore,
From the above condition, we know the zero solutions of Eq. 11 is asymptotically stable, which shows that the networks achieve individual inner synchronization.
Remark
The linear matrix equality method is inadequate for assessing the stability of the synchronous solution when both intragroup and extra-group connections are allowed in the network (2).
Numerical examples
In this section, we will give two examples to illustrate our obtained results, which includes two cases: n x ≠ n y and n x = n y . For the case n x ≠ n y , we only consider the inner synchronization within each network. On the other hand, owing to n x = n y , we not only discuss the inner synchronization within each network, but also investigate the outer synchronization between two networks.
Example 1.
We consider the following coupled discrete-time networks, which are in the form (3),
In the absence of coupling r x = r y = 0, the node dynamics in Eqs. 15 and 16 is Logistic map and Henön map respectively, which have colorful dynamical properties, for instance, ρ = 3.1, a = 0.5, b = 0.3, they both have periodic solutions. In the following numerical simulation, we always take ρ = 3.1, a = 0.5, b = 0.3 and τ x = τ y = τ, N x = N y = N, and \(\Upgamma_3,\Upgamma_4\) are identity matrices in the Figs. 2, 3 and 4. For simplicity, D ij = C ji = 1/N for i, j = 1, ..., N. To measure the extent to which inner synchronization is achieved, we introduce the following quantities, E x = ||x i − x s ||, i = 1, ..., N, and E y = ||y j − y s ||, j = 1, ..., N. When ρ = 3.1, a = 0.5, b = 0.3, by using the Matlab LMI Toolbox, we solve the LMI (12) for P > 0, Q > 0, and obtain
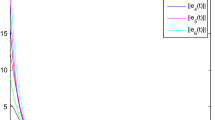
Therefore, it follows from Theorem 1 that the inner synchronization within each network is achieved for some values of coupling strength r y . Figure 2 plots the curves of E x , E y concerning r y with τ = 2 and τ = 8, respectively.

The panels exhibit E x , E y at t = 400 concerning r y for N = 10, r x = 0.1 with τ = 2 and τ = 8. The upper one shows that inner synchronization within network Y can be easily achieved than network X. While for the value of τ = 8, network Y becomes unsynchronized, which illuminates that the delays have more influence on network Y than network X

The curves of E x , E y at t = 400 regarding N with τ = 2, r x = r y = 0.1

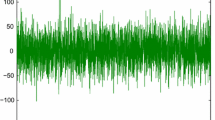
The trajectories of E x , E y at t = 400 for (17) with τ = 2, r x = r y = 0.1, ɛ y = 0.05
Next we discuss the effect of network size N on inner synchronization, and take D ij = C ji = 1/N, the detailed numerical results are shown in Fig. 3. We find that inner synchronization within each network both appear when the size of network is less than 10. With the increasing value of τ ∈ [2, 12], network Y always remains synchronized, while network X becomes unsynchronized little and little. Now we add the individual connections in network X and network Y, i.e., consider the general model (2),
We now choose the same parameters as those in Fig. 3, and ɛ y = 0.05, N = 10, the coupling matrices A,B are chosen as two random matrices. With this coupling configuration (17), we find that only network X achieve the inner synchronization for ɛ x ≤ 0.03, while network Y is all through unsynchronized, the delay τ ∈ [2, 8]. Figure 4 depicts the evolution of E x , E y on ɛ x .
Example 2.
For this case n x = n y , we not only discuss inner synchronization inside network X or Y, but also study outer synchronization (Li et al. 2007) between network X and network Y. Therefore, we introduce the quantity E outer = ∥x i − y i ∥ for i = 1, ..., N to demonstrate whether outer synchronization happens. Consider the Logistic map as the dynamical nodes of the complex networks which is described by
The parameters \(\Upgamma_3,\Upgamma_4\) and C ji ,D ij are taken as same as in Example 1, and we choose ρ1 = 2.6, ρ2 = 2.3 for simulation, by solving the LMI (12) for P > 0, Q > 0, we obtain P = (4.2082), Q = (3.8691), which indicates that inner synchronization of network (18) is realized. The numerical details are summarized in Figs. 5, 6 and 7.

The evolution curves of synchronized state x s , y s at t = 400 with regard to r y for r x = 0.2, τ = 2

The plot shows E x , E y , E outer at t = 400 on r y for r x = 0.2 with τ = 2 and τ = 8. Inner synchronization happens for r y being in [0, 0.15], yet outer synchronization only appears when r y approaches 0.1, and the delays influence the synchronization less

The curves of E x , E y , E outer at t = 400 regarding N with τ = 2,r x = r y = 0.2. When the delay τ ≥ 10, inner synchronization also disappears
When ρ1, ρ2 > 3, the map evolves periodically and even behaves chaotically, but this condition does not satisfy the stability condition, so inner synchronization within each network doesn’t appear, and numerical simulation shows that outer synchronization between them also doesn’t happen. Next we consider the model (17), and also take the coupling matrices A,B as two random matrices, the numerics show that two kinds of synchronization don’t happen whatever the coupling strength is adjusted.
Conclusions and discussions
This paper discussed inner synchronization within each network and outer synchronization between two networks with time delays. We studied the stability of the synchronization manifold within each network by means of LMI method. Through the numerical examples, we found that the delays affect the inner synchronization more in Example 1 and less in Example 2. How to derive a theoretical domain of time-delay will be the scope of our future work, and we reported numerical evidence that the added connections within each network can’t enhance the network synchronizability. It is noted that outer synchronization in Example 2 is very difficultly achieved than inner synchronization, which shows that outer synchronization between two networks needs strong coupling form. Owing to the diversity of \({\mathbb{C}}_{XY}, {\mathbb{C}}_{YX}\), deriving the criteria on inner and outer synchronization simultaneously is an technical challenge, besides the control skills can be used to realize outer (inner) synchronization.
Our results of this study can be applied to analyze some biological systems, such as two coupled neuronal populations (Wang and Jiao 2006) with (without) time delays. The theoretical understanding is helpful to study the synchronization between two or more neural networks (He and Cao 2008; Liang et al. 2008) with appropriate couplings. We hope that such reports will appear elsewhere.
References
Albert R, Barabási AL (2002) Statistical mechanics of complex networks. Rev Mod Phys 74:47–97
Barabási AL, Albert R (1999) Emergence of scaling in random networks. Sci Agric 286:509–512
Börgers C, Kopell N (2003) Synchronization in networks of excitatory and inhibitory neurons with sparse, random connectivity. Neural Comput Appl 15:509–538
Bullmore E, Sporns O (2009) Complex brain networks: graph theoretical analysis of structural and functional systems. Nat Rev Neurosci 10:186–198
Dhamala M, Jirsa VK, Ding MZ (2004) Enhancement of neural synchrony by time delay. Phys Rev Lett 92:074104
Eguíluz VM, Chialvo DR, Cecchi GA, Baliki M, Apkarian AV (2005) Scale-free brain functional networks. Phys Rev Lett 94:018102
Gray CM (1944) Synchronous oscillations in neuronal systems: mechanisms and functions. J Comput Neurosci 1:11–38
He W, Cao J (2008) Robust stability of genetic regulatory networks with distributed delay. Cogn Neurodyn 2:355–361
Jirsa VK (2008) Dispersion and time delay effects in synchronized spike-burst networks. Cogn Neurodyn 2:29–38
Kanamaru T (2006) Analysis of synchronization between two modules of pulse neural networks with excitatory and inhibitory connections. Neural Comput Appl 18:1111–1131
Landsman A, Schwartz I (2007) Synchronized dynamics of cortical neurons with time-delay feedback. Nonlinear Biomed Phys 1:2
Li CP, Sun WG, Kurths J (2007) Synchronization between two coupled complex networks. Phys Rev E 76:046204
Li CP, Xu CX, Sun WG, Xu J, Kurths J (2009) Outer synchronization of coupled discrete-time networks. Chaos 19:013106
Liang JL, Wang ZD, Liu YR, Liu XH (2008) Robust synchronization of an array of coupled stochastic discrete-time delayed neural networks. IEEE Trans Neural Netw 19:1910–1921
Liu Y, Liang M, Zhou Y, He Y, Hao YH, Song M, Yu CSh, Liu HH, Liu ZhN, Jiang TZ (2008) Disrupted small-world networks in schizophrenia. Brain 131:945–961
Mancilla JG, Lewis TJ, Pinto DJ, Rinzel J, Connors BW (2007) Synchronization of electrically coupled pairs of inhibitory interneurons in neocortex. J Neurosci 27:2058–2073
Masoller C, Torrent M, García-Ojalvo J (2009) Dynamics of globally delay-coupled neurons displaying subthreshold oscillations. Phil Trans R Soc A 367:3255–3266
Melloni L, Molina C, Pena M, Torres D, Singer W, Rodriguez E (2007) Synchronization of neural activity across cortical areas correlates with conscious perception. J Neurosci 27:2858–2865
Ramirez JA, Rodriguez E, Echeverría JC (2009) Delays in the human heartbear dynamics. Chaos 19:028502
Sorrentino F, Ott E (2007) Network synchronization of groups. Phys Rev E 76:056114
Sporns O, Zwi JD (2004) The small world of the cerebral cortex. Neuroinformatics 2:145–162
Stam CJ, Reijneveld JC (2007) Graph theoretical analysis of complex networks in the brain. Nonlinear Biomed Phys 1:3
Torikai H, Saito T (2004) Synchronization phenomena in pulse-coupled networks driven by spike-train inputs. IEEE Trans Neural Netw 15:337–347
Wang RB, Jiao XF (2006) Stochastic model and neural coding of large-scale neuronal population with variable coupling strength. Neurocomputing 69:778–785
Watts DJ, Strogatz SH (1998) Collective dynamics of small-world Networks. Nat Biotechnol 393:440–442
Zhou CS, Zemanová L, Zamora-Lopez G, Hilgetag C, Kurths J (2007) Structure-function relationship in complex brain networks expressed by hierarchical synchronization. New J Phys 9:178–198
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Nos. 10672057, 10872068 and 10872119), the Fundamental Research Funds for the Central Universities and Research Foundation of Hangzhou Dianzi University.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Sun, W., Wang, R., Wang, W. et al. Analyzing inner and outer synchronization between two coupled discrete-time networks with time delays. Cogn Neurodyn 4, 225–231 (2010). https://doi.org/10.1007/s11571-010-9118-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11571-010-9118-9