
Abstract
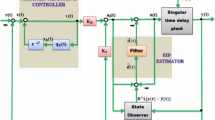
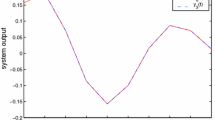
Repetitive control, which adds a human-like learning capability to a control system, is widely used in many fields. This paper deals with the problem of designing a robust repetitive-control system based on output feedback for a class of plants with time-varying structured uncertainties. A continuous-discrete two-dimensional hybrid model is established that accurately describes the features of repetitive control so as to enable independent adjustment of the control and learning actions. A sufficient condition for the robust stability of the repetitivecontrol system is given in terms of a linear matrix inequality. The condition is then used to obtain the parameters of the repetitive controller. Finally, a numerical example demonstrates the effectiveness of the method.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
Inoue T, Nakano M, Iwai S. High accuracy control of servomechanism for repeated contouring. In: Proceeding of the 10th Annual Symposium on Incremental Motion Control Systems and Devices, Urbana-Champaign, 1981. 285–292
Nakano M, Inoue T, Hara S, et al. Repetitive control (in Japanese). Tokyo: the Society of Instrument and Control Engineers, 1988
Inoue T, Nakano M, Iwai S. High accuracy control of a proton synchrotron magnet power supply. In: Proceedings of 8th Word Congress of IFAC. Kyoto: Pergamon Press, 1981. 216–221
Chen J W, Liu T S. H ∞ repetitive control for pickup head flying height in near-field optical disk Drives. IEEE Trans Magnet, 2005, 41: 1067–1069
Doh T Y, Ryoo J R, Chung M J. Design of a repetitive controller: an application to the track-following servo system of optical disk drives. IEE Proceed Control Theory Appl, 2006, 153: 323–330
Wu M, Lan Y H, She J H. A new method of repetitive control designing based on 2D mixed model (in Chinese). Acta Automat Sin, 2008, 34: 1208–1213
Xie LH, Du CL. H ∞ Control and Filtering of Two-dimensional System. Berlin: Springer, 2002. 5–25
Ding W D, Sun Z Y, Wu J H. Closed loop p-type iterative learning control based on the 2D linear continuous discrete system theory. Electr Mach Control, 2003, 7: 59–62
Ho D W C, Lu G. Robust stabilization for a class of discrete-time non-linear system via output feedback: the unified LMI approach. Int J Control, 2003, 76: 105–115
Yakubovich V A. S-procedure in nonlinear control theory. Vestnik Leningrad University Mathematics (in Russian 1971), 1977, (4): 73–93
Khargonek P P, Petersen I R, Zhou K. Robust stabilization of uncertain linear systems: Quadratic stability and H ∞ control theory. IEEE Trans Automat Control, 1990, 35: 356–361
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wu, M., Zhou, L., She, J. et al. Design of robust output-feedback repetitive controller for class of linear systems with uncertainties. Sci. China Inf. Sci. 53, 1006–1015 (2010). https://doi.org/10.1007/s11432-010-0095-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11432-010-0095-8