
Abstract
Background
The nonlinear dynamic behavior of miniature stack-type piezoelectric actuators is not yet fully investigated and is still an open research field.
Objective
The objective of this paper is to determine an accurate dynamical model of an amplified stack-type piezoelectric actuator by using a recently developed nonlinear system identification method, namely Response-Controlled stepped-sine Testing (RCT).
Method
The nonlinear modal identification of a miniature stack-type piezoelectric actuator combined with a rhombus-type compliant mechanism is accomplished by using the RCT method. Several important modifications in the implementation of the RCT method imposed by the miniature nature of the piezo-actuator are successfully achieved for the first time in this study.
Results
Preliminary constant-voltage tests indicate strong softening nonlinearity with jump phenomenon at high voltage levels. In the nonlinear mode of interest, the RCT method quantifies about a 130 Hz change of natural frequency which corresponds to a 3% frequency shift, and a nonlinear modal damping ratio ranging from 1% to 1.5%, corresponding to a 50% change in the amplitude range of interest.
Conclusion
The validity of the single nonlinear mode theory on stack-type piezo-actuators and the quantification of the nonlinear modal damping of this type of actuators are achieved for the first time in this study to the best of the authors’ knowledge. Consequently, an accurate nonlinear modal model is constructed which may help to estimate the parameters of a physical-driven (constitutive) model and therefore gain a better theoretical understanding of the nonlinear behavior of stack-type piezo-actuators. Furthermore, it is shown that the RCT method can be successfully applied for the modal identification of nonlinear miniature electro-mechanical systems.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
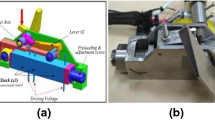
Piezoelectric actuators are widely used in small-scale applications [1]. Multi-layer piezoelectric stack actuators (MPSAs) are superior to other types of piezoelectric actuators in terms of precision, resolution, stiffness, output force, and compactness. Despite the promising features, MPSAs suffer from low displacement as an output. The output displacement of the MPSAs is enhanced by employing compliant mechanisms while reducing the output force [2, 3]. MPSAs with rhombus-type flextensional compliant mechanisms are utilized in various engineering fields under the name of amplified piezoelectric actuators (APAs). APAs are available in the market as a family of products (Fig. 1). Miniature APAs are used as positioners, motors, and vibration dampers in various micro-systems such as precise positioning mechanisms in optical devices, small-scale ultrasonic motors, and active vibration controllers in space structures [4].

(a) Working principle of an amplified piezo-actuator (APA), (b) photograph of the amplified piezo-actuator-APA35XS by Cedrat Technologies [5]
Dynamic applications require predicting dynamic displacements of an APA under high frequency and resonant conditions [6]. In early studies, miniature APAs have been considered low-power actuators and expected to behave linearly under weak electric fields [7]. Accordingly, linear constitutive models have been utilized to estimate the dynamic behaviors of APAs. However, recent studies reveal that piezoelectric actuators exhibit nonlinear behavior even when subjected to weak electric fields [8,9,10,11]. A nonlinear model is required to describe the behavior of a piezoelectric actuator for dynamic applications.
There is an extensive body of literature for modeling and experimental identification of nonlinearities in patch-type piezoelectric actuators (see, e.g., [12,13,14,15,16,17,18]). In the literature, the general approach is to presume a physical-driven (constitutive) nonlinear model for the piezoelectric material by observing measured constant-voltage frequency response data. The apriori model is then converted to a reduced-order modal model that can be used to carry out dynamic simulations. The identification is completed by tuning the parameters of the physical model in a manner to match the simulated frequency response (or backbone curve) data with the corresponding experimental data. A drawback of this approach is that it is quite possible to overlap the simulated and experimental data even with an incorrect model. For example, if the constitutive model assumes linear damping while the actual piezo-material exhibits nonlinear damping, the tuning process will compensate this modeling error by overshooting the actual parameters of the conservative part of the constitutive model. This issue may be handled possibly better by directly correlating parameters of the physical model with the measured nonlinear modal data instead of frequency response data. By virtue of the recent developments in the field of nonlinear structural dynamics, the accurate identification of nonlinear modal parameters including the nonlinear modal damping ratio is now within reach [19, 20].
Compared to patch-type piezo-actuators, the literature about the stack-type piezo-actuators is very limited [4, 10, 11, 21,22,23,24,25,26]. Dynamic behaviors of both types of actuators considerably differ from each other. In the patch-type actuators, nonlinearity in the ‘31’-electromechanical coupling and its associated ‘1’-directional elasticity becomes important. On the other hand, in the stack-type actuators nonlinearity in the ‘33’-electromechanical coupling and ‘3’-directional elasticity has to be taken into account. To the best of the authors' knowledge, the only comprehensive study that characterizes the nonlinearity of stack-type actuators has been recently published in [11]. In that work, Shivashankar et al. constructed a nonlinear constitutive model for longitudinal vibrations of MPSAs by following a procedure similar to the one previously mentioned for patch-type actuators. The experimentally extracted backbone curve plays the key role to characterize the nonlinearity, i.e., in proposing a nonlinear constitutive model with unknown coefficients. These unknown coefficients are then identified by using constant-voltage frequency response data. Although constant-voltage (or force) testing may be suitable to extract the backbone curves in the case of relatively weak nonlinearities [11], it may result in considerable inaccuracy in the case of strong nonlinearities that exhibit the jump phenomenon due to unstable branches [27]. Fortunately, a prominent feature of the RCT method [19] is the accurate identification of turning points, unstable branches, and backbone curves of frequency response functions (FRFs), as shown later in this paper. Furthermore, keeping the response amplitude constant during frequency sweep makes the RCT method very suitable to study the frequency dependency of nonlinearity [28], which may also be a considerable issue for the MPSAs as discussed in [11, 29]. It is also possible to identify the nonlinear modal damping accurately by employing the RCT method using standard commercial modal test equipment, which is still a difficult task with other techniques. In the work of Shivashankar et al. [11], the damping is assumed to be linear which is arguable, and which may also affect the accuracy of the constitutive model. In literature, there exist studies that investigate the nonlinear damping mechanism of patch-type piezo-actuators [15, 16]. However, no such study is available in the limited literature on stack-type piezo-actuators.
Similar to many nonlinear system identification techniques recently developed in the field of structural dynamics, the RCT method also relies only on the nonlinear normal mode (NNM) concept which was first introduced by Rosenberg [30]. Analogous to linear normal modes, Rosenberg defined a nonlinear mode as a vibration in unison of a nonlinear system. Later, in 1979, Szemplinska-Stupnicka presented the modified “single nonlinear mode” method [31] to model near-resonant vibrations of nonlinear multi-degree of freedom (MDOF) systems by using the NNM concept. The proposed method shows that the near-resonant frequency responses of a nonlinear system can be expressed by using a single NNM and its corresponding natural frequency, presuming the modes are well separated and no internal resonances occur. The single NNM and corresponding nonlinear modal parameters are functions of modal amplitude.
Until the 2010s, studies that used the NNM concept in nonlinear system identification were very few in number. Important early examples are [32, 33]. However, in the last decade, the number of nonlinear modal identification methods based on the NNM concept has increased significantly [34,35,36,37]. Although these state-of-the-art techniques successfully identify NNM backbone curves, the accurate identification of nonlinear modal damping is still a challenging issue. Furthermore, there exist few studies that identify a high degree of nonlinearities and that validate the identified nonlinear modal properties.
Recently, phase resonance testing with a phase-locked-loop (PLL) controller [37] successfully achieved the identification of nonlinear modal damping of a friction-damped joint resonator [20] by using the extended periodic motion concept [38]. This approach proved also its applicability for the identification of much stronger nonlinearities; modal damping ratio of up to 15% and a resonance frequency shift by 36% in the case of a cantilever beam with dry-friction [39]. An important benefit of the phase resonance testing with the PLL controller is that only the points on the backbone curve need to be tested, which can reduce the test duration considerably. On the other side, a possible drawback is that it is currently not implemented in commercial modal test systems (e.g., LMS Test Lab), and therefore cannot easily be used by practicing engineers.
Another promising nonlinear modal identification method that can identify nonlinear modal damping ratio and that can accurately quantify a high degree of nonlinearities has been recently proposed by Karaağaçlı and Özgüven in [19] under the name of response-controlled stepped-sine testing (RCT). In this method, the displacement amplitude of the driving (excitation) point is kept constant in a closed-loop control during the stepped sine testing. Various applications ranging from simple benchmarks to real and complex engineering systems showed that this control strategy yields quasi-linear constant-response FRFs around resonance frequencies. The important merit of the RCT method is that these quasi-linear FRFs can be easily measured using standard commercial modal test equipment. Then, they can be processed by standard linear analysis techniques to accurately identify response level-dependent modal properties of nonlinear structures. The RCT method has been successfully applied so far to a T-beam with local cubic stiffness [19], a missile structure with considerable damping nonlinearity mostly due to bolted joints [19], and a double clamped beam with strong geometrical nonlinearity [40]. In [40], the RCT method accurately quantified about a 20% shift of the natural frequency and an order of magnitude change in modal damping ratio (from 0.5% to 4%).
It is worth mentioning that the idea of extracting response-level dependent modal parameters from constant-response testing essentially dates back more than a decade earlier than the RCT method [41, 42]. However, in [41], the theoretical base remains restricted to structures with local nonlinearities. On the other hand, in [42], although it is achieved to identify amplitude-dependent modal parameters of an engineering system with distributed nonlinearity by using constant-acceleration testing, the nonlinearity is weak; the method lacks theoretical justification and is based on intuition. Moreover, keeping acceleration amplitude constant is just an approximation to keeping displacement amplitude constant, and does not hold true when there is considerable resonance frequency shift as in the case of geometric nonlinearities. The RCT method [19], on the other hand, provides a rigorous mathematical framework by combing the single nonlinear mode theory [31] with the Nonlinearity Matrix concept [43], and its applicability is experimentally demonstrated on various strongly nonlinear mechanical systems as mentioned above. It is also important to note that the contribution of the RCT is not limited to the identification of response-dependent modal parameters. It uses these parameters to obtain constant force amplitude FRFs both in stable and unstable frequency regions. Furthermore, it provides the unstable branches of FRFs directly from measurements as well by using the harmonic force surface (HFS) concept [19, 27, 40].
The applicability of RCT on a miniature electro-mechanical system that incorporates piezoelectric material could not be taken for granted for several reasons. Firstly, the frequency dependence of the nonlinearity in stack-type piezo-actuators could possibly be significant as suspected by Shivashankar et al. [11], which could degrade the quasi-linearity of constant-response FRFs. Secondly, the miniature nature of the electro-mechanical device required to conduct the test at very low response amplitudes (far below 10 µm) compared to previous RCT applications [19, 40]. This could possibly lead to a considerably low S/N ratio which could distort the measurements and render response-control impossible. Thirdly, the small scale of the APA enforces considerable modifications in the usual implementation of the RCT method: a non-contact laser displacement sensor is chosen as the control sensor instead of an accelerometer, the structure is excited with the embedded piezoelectric stack actuator instead of an electrodynamic shaker, and the excitation and response control points do not coincide. These modifications could possibly cause unexpected complications that could obstruct the applicability and disrupt the accuracy of the RCT method. Therefore, one of the important contributions of this paper is to clarify all these issues and to demonstrate the applicability of the RCT method to miniature electromechanical devices.
In this work, the miniature amplified piezoelectric actuator APA35XS shown in Fig. 1(b) from Cedrat Technologies is selected as a test specimen [5]. The displacement amplitude of the control point is kept constant, and the input voltage spectrum corresponding to each displacement amplitude level is measured during the stepped-sine tests. Eventually, frequency response functions (FRFs) come out in the quasi-linear form. Modal parameters are experimentally identified from the quasi-linear FRFs through standard linear modal analysis tools. Nonlinear modal parameters of the miniature APA are then extracted as functions of response amplitude. In the mode of interest, the RCT quantifies about a 130 Hz change of natural frequency and a modal damping ratio ranging from 1% to 1.5% in the amplitude range of interest, which indicates considerably high stiffness and damping nonlinearities. Finally, nonlinear modal parameters are validated by comparing the constant-force frequency response curves synthesized from these parameters with those extracted directly from the experiment using the harmonic force surface (HFS) approach proposed in [19].
This section is concluded by emphasizing another important contribution of this paper. As previously mentioned, the literature about the nonlinear dynamics of stack-type piezo-actuators is very limited, and this is the first work that investigates the nonlinear damping of this type of actuator. In the Experimental Work section, it is shown that, similar to APA35XS, the stack-type actuator studied in [11] also exhibits considerable damping nonlinearity contrary to the linear damping assumption of Shivashankar et al. More importantly, this is achieved in a novel way by constructing the HFS for the first time from the constant-voltage frequency response curves (instead of constant-response harmonic voltage (or force) spectra), which is the only available experimental data in [11]. The HFS is then sliced by constant displacement amplitude planes that give quasi-linear constant-response FRFs. These FRFs are processed with standard linear modal analysis techniques to extract nonlinear modal parameters, including modal damping ratio. Finally, it is shown that the constant-voltage FRFs synthesized by using the identified nonlinear modal damping ratio match with the real experimental data significantly better than the ones synthesized by using the linear damping model of Shivashankar et al. [11].
Methodology
Nonlinear experimental modal analysis by using the RCT method has been recently proposed in [19] where its theoretical background and implementation are explained in detail. For the sake of completeness, the fundamental steps and the key features of the method are explained below.
The experimental modal analysis with RCT consists of the following fundamental steps:
-
Step 1: Quasi-linear constant-response FRFs are measured at several different displacement amplitude levels by keeping the displacement amplitude of the control point constant throughout the stepped sine testing at each level.
-
Step 2: Modal parameters of each quasi-linear FRF are identified using standard linear modal analysis tools. A nonlinear modal model is then constructed by expressing the identified modal parameters as functions of the displacement (equivalently modal) amplitude.
-
Step 3: Required near-resonant constant-force (or voltage) frequency response curves are calculated employing the identified modal parameters in a Newton Raphson solution scheme with the arc-length continuation algorithm.
The quasi-linearity of constant-response FRFs mentioned above is theoretically based on the following receptance formula derived from the single nonlinear mode theory [31] and the Nonlinearity Matrix concept [43] as explained in [19]:
where \({\overline{A} }_{jkr}\left({q}_{r}\right)\), \({\overline{\omega }}_{r}\left({q}_{r}\right)\), \({\overline{\eta }}_{r}\left({q}_{r}\right)\) and \({q}_{r}\) are the complex modal constant, natural frequency, modal damping ratio, and the modal amplitude of the \(r\) th nonlinear normal mode, respectively. \(j\) is the response coordinate, \(k\) is the excitation coordinate, and \(\omega\) represents the excitation frequency.
Obviously, all the modal parameters given in equation (1) are functions of a single parameter; the modal amplitude \({q}_{r}\). Accordingly, if the modal amplitude is kept constant throughout the stepped-sine testing, the measured receptances come out in the quasi-linear form. In [19], it has been shown that the constant modal amplitude condition can be achieved by keeping the displacement amplitude of the control point constant. This also means that the modal amplitude can be mapped to the spatial displacement amplitude of the control point. Therefore, the receptance shown in equation (1) can be alternatively expressed as follows:
where \(\left|{X}_{j}\right|\) is the displacement amplitude of the control point.
It is important to note that the single nonlinear mode theory does not provide a general mathematical proof that guarantees the validity of its fundamental hypothesis for any nonlinear structure, i.e., the dependence of nonlinear modal parameters on a single parameter; the modal (or displacement) amplitude. In order to turn this hypothesis into a well-established theory, it must be verified by experiments applied to different types of nonlinearities. The RCT has already been verified so far on joint nonlinearities [19] and continuously distributed (geometrical) nonlinearities [40], which are considered challenging problems for the current state-of-the-art. This particular research paper makes a third important contribution that further expands the application area of the single nonlinear mode theory and the RCT method to include miniature electro-mechanical devices that incorporate piezoelectric material.
Concluding this section, it is interesting to note that since the exciter, i.e., piezo-actuator, is an integral element of the test structure, it is not possible to quantify the excitation force in the units of Newton directly. However, this is not an important issue since the main objective of this study is to construct an accurate mathematical model that relates the input voltage to the displacement output. Accordingly, the receptance formula given in equations (1) and (2) are also used somewhat differently than their classical definitions. The receptance represents the relation between the excitation force and the output displacement in its classical definition. However, in this study, it represents the transfer function between the input voltage and the output displacement.
Experimental Work
As reported in [11], most of the studies in the literature have focused on characterizing the nonlinear dynamic behavior of patch-type piezoelectric actuators. Since works about the elasticity of stack-type piezoelectric actuators are quite a few, their nonlinear dynamic behavior is not yet fully understood and is still an open research field. From this perspective, an important merit of this experimental work is the identification of nonlinear modal parameters and the construction of an accurate nonlinear modal model of a commercial miniature APA, which may help to estimate the parameters of a physical-driven (constitutive) model and therefore to gain a better theoretical understanding about the nonlinear behavior of stack-type piezoelectric actuators.
Experimental Setup
The test structure is the APA35XS model miniature actuator manufactured by Cedrat Technologies [5] (Fig. 1(b)). It consists of two components: A multi-layer stack type piezoelectric actuator and a rhombus type compliant mechanism that converts the lateral (horizontal) motion of the piezoelectric actuator into transverse (vertical) motion. The focus of this study was the fundamental transverse vibration mode of the APA in the actuation direction that exhibits strong softening nonlinearity. In order to study that mode, the APA was fixed to the ground from its base (Fig. 2).

Schematic view of the experimental setup
Since the APA is a self-exciting structure, it does not require an external excitation source. Therefore, the harmonic excitation force was generated by feeding the stack-type piezoelectric actuator embedded in the APA with harmonic voltage input. Since the excitation mechanism is part of the tested structure, the exciter-structure interaction is not very relevant to the application case studied herein. However, in the case of an external exciter such as an electrodynamic shaker, this interaction can be a considerable issue [44, 45]. If the basic assumptions of the single nonlinear mode theory [31], i.e. well-separated modes and negligible higher harmonics, hold true, and the shaker attachment does not significantly distort the modal deflection, then the shaker-structure interaction is not pronounced [44] and the RCT method can be successfully applied by using standard modal test equipment. In practice, various damping mechanisms (e.g., friction at joints and/or material damping) naturally suppress the effects of higher harmonics [40, 44] and the single nonlinear mode theory remains valid for a wide range of applications as in the case of this paper and the previous applications of the RCT method [19, 27, 40]. However, at sufficiently high energy levels, strong higher harmonics may arise due to harmonically coupled modes (internal resonance) [46]. In such a case, the closed-loop response-control has to be implemented with a noninvasive control scheme [47] so that the controlled structure behaves the same as the open-loop structure. Alternatively, internal resonance can be studied by phase resonance testing with a PLL controller, which is naturally noninvasive.
The vibration response of interest is the vertical tip displacement of the APA in the actuation direction (which is related to the transverse vibration mode). The tip displacement was measured by a non-contact laser displacement sensor (Micro-Epsilon OptoNCDT 2300) [48], which was installed on top of the actuator, as shown in Fig. 2.
During the experimental work, all the data acquisition and closed-loop control tasks were accomplished by the LMS SCADAS system and LMS Test Lab software. The schematic view of the experimental test setup is shown in Fig. 2. The frequency range of interest encompassing the mode of interest was determined by preliminary fast sine sweep (periodic chirp) tests. During all the constant-voltage and constant-response stepped sine tests, the frequency step was taken to be 0.5 Hz.
Results of Constant-Voltage Stepped Sine Tests
Before the application of the RCT method, a series of constant-voltage tests were conducted on the miniature APA similar to [11]. The amplitude of the input harmonic voltage is kept constant in closed-loop control. The measured output is the tip displacement of the APA. FRFs measured at different constant voltage levels are shown in Fig. 3. As the voltage level is increased from 0.1 V to 3 V, an approximately 130 Hz drop of the resonance frequency is observed, which indicates strong softening nonlinearity.

FRFs measured by constant-voltage stepped-sine testing
Another important observation related to Fig. 3 is the jump phenomenon observed at high voltage levels, which is an indication of unstable regions. This is an interesting difference between this study and the work of Shivashankar [11]. In the latter, the nonlinearity is relatively weak, and luckily no jump is encountered. During constant-voltage (or force) stepped-sine testing of structures in an unstable region, corrective voltage (or force) perturbation of the controller to capture the reference signal in the proximity of the FRF turning point may lead to a premature jump before reaching the actual resonance peak [27]. In such a case, the accuracy of the measured backbone curve is always questionable.
It is also important to note that for most state-of-the-art techniques including constant-voltage (or force) testing, identifying nonlinear modal damping is still a challenging issue. Regarding Fig. 3, standard linear modal analysis techniques may only help to extract modal damping at the lowest voltage level, where the system’s FRF looks linear. In [11], the damping of the stack-type piezoelectric actuator is assumed to be linear without solid proof.
Identification of Nonlinear Modal Parameters by Using the RCT Method
In the RCT method, first of all, a series of response-controlled stepped-sine tests were conducted at 11 different displacement amplitude levels of the tip point of the miniature APA ranging from 0.5 µm to 10 µm. During each test, the displacement amplitude of the tip point was kept constant throughout the frequency sweep in closed-loop control, and the corresponding harmonic input voltage spectrum was recorded. Then, dividing the constant harmonic displacement spectrum by the corresponding harmonic voltage spectrum, constant-response FRFs were obtained, as shown in Fig. 4.

Quasi-linear constant-response FRFs measured by RCT
The first important observation relevant to Fig. 4 is that although the constant-response FRFs cover the voltage levels shown in Fig. 3, they do not exhibit any jump phenomenon. This is due to the fact that the test structure settles in one stable orbit throughout the frequency sweep by virtue of the constant-response strategy of the RCT method. With this strategy, the competition of multiple stable orbits and, therefore the jump phenomenon, which is typically encountered in constant-voltage (or force) testing, is avoided. The interested reader may refer to [40] for a detailed discussion of this issue.
The second important observation that can be made from Fig. 4 is that the constant-response FRFs turn out to be quasi-linear. This means that the fundamental hypothesis of the single nonlinear mode theory [31], i.e., all the modal parameters being a function of a single parameter, the response (equivalently modal) amplitude, holds true for the miniature APA. It also means that the frequency dependence of the nonlinearity is negligible at least in a narrow frequency band covering the resonance region of a specific mode. These results are consistent with the nonlinear constitutive model of stack-type piezo-electric actuators constructed in [11]. However, it is also important to note that in [11], the coefficients of the constitutive model identified by using two different modes are considerably different from each other. Shivashankar et al. relate this issue to the frequency dependence of nonlinearity, which is still reasonable: Although the frequency dependence looks to be negligible in the neighborhood of specific modes, it may be pronounced over a wide frequency band covering multiple modes. The inconsistency of the coefficients of the constitutive model could also be related to the linear damping presumption of Shivashankar et al. [11]. Later in this section, the nonlinear modal damping ratio is identified as a function of displacement amplitude by processing the constant-voltage frequency response curves measured in [11] and using the HFS concept. It is demonstrated that constant-voltage FRFs synthesized by using the nonlinear modal damping ratio match with the experimental data significantly better compared to the case where linear damping assumption is used.
Modal parameters of each quasi-linear FRF shown in Fig. 4 can be extracted by using standard linear modal analysis methods. As an illustrative example, the quasi-linear FRF measured at 0.5 µm harmonic displacement amplitude is compared with the linear FRF synthesized from the identified modal parameters in Fig. 5. The same procedure is repeated for the rest of the FRFs measured using the RCT method. After obtaining modal parameters for each quasi-linear FRF, curves are fitted onto the identified modal parameters by using the fit function of MATLAB with the piecewise cubic Hermite interpolation (pchipinterp) method, as shown in Figs. 6 and 7.

Comparison of the constant-response FRF synthesized by using the identified modal parameters with the one measured by RCT

Variation of the modal parameters corresponding to the nonlinear normal mode of the APA35XS with respect to the response level: (a) natural frequency, (b) modal damping ratio

Variation of the modal constant corresponding to the nonlinear normal mode of the APA35XS with respect to the response level
As indicated in Fig. 6(a), the resonance frequency decreases almost linearly with increasing response amplitude. As shown in the next section, the backbone curve of the miniature APA is also an inclined straight line. This behavior is consistent with the nonlinear behavior of the stack-type piezo-actuator studied in [11]. From Fig. 6(a), it is also observed that the drop of the resonance frequency is about 130 Hz, which indicates a strong softening nonlinearity.
Figure 6(b) indicates that the modal damping ratio exhibits an abrupt increase from 1.0% to 1.5% at relatively low response levels. However, it looks like to settle around a constant value at high response levels.
Validation of the Nonlinear Modal Model
In order to validate the identified modal parameters, first of all, harmonic voltage spectra measured at constant-displacement amplitude levels are merged to construct the HFS by using linear interpolation, as shown in Fig. 8. Slices of the HFS at constant voltage levels give constant-voltage frequency response curves, which are purely experimental data. The prominent feature of the HFS technique is the accurate extraction of the turning and unstable branches of these curves, which cannot be achieved by constant-voltage testing due to the jump phenomenon (Fig. 3). A detailed discussion of the HFS approach is given in [19, 27].

(a) Harmonic excitation voltage spectra of the APA measured during RCT (b) HFS of the free end constructed by combining harmonic excitation voltage spectra with linear interpolation
Identified nonlinear modal parameters are validated by comparing constant-voltage frequency response curves synthesized from these parameters, by using the Newton–Raphson method and the arc-length continuation algorithm, with the ones extracted from the HFS. The comparison is shown in Fig. 9. It can be observed from the figure that the match between synthesized and extracted curves is almost perfect, which demonstrates the accuracy of the identified nonlinear modal parameters.

Comparison of constant-voltage frequency response curves extracted from HFS with the ones synthesized by using nonlinear modal parameters
Finally, the NNM backbone curve constructed by using constant-voltage frequency response curves synthesized from the identified nonlinear modal parameters is compared with the one directly extracted from the HFS, which is purely measured (nonparametric) data, as shown in Fig. 10. The good match between both backbone curves once again validates the accuracy of the identified nonlinear modal model. It is also worth mentioning that the backbone curve is an inclined straight line which is consistent with the nonlinear behavior of the stack type piezo-actuator studied in [11] as discussed in the previous section. It can be concluded that the nonlinearity of the miniature APA studied herein is most governed by the nonlinearity of the embedded piezo-actuator.

Comparison of the backbone curve extracted from HFS with the one obtained by using nonlinear modal parameters
Identification of Nonlinear Modal Damping Ratio of Stack Piezoelectric Actuators by Using the Harmonic Force Surface Concept
In previous sections, it has been discussed that the linear damping assumption of the Shivashankar et al. [11] for stack-type actuators does not rely on solid proof. This section demonstrates that they could actually extract the nonlinear modal damping ratio accurately by just constructing the Harmonic Force Surface (HFS) from already available measurements without any extra experimental effort.
In all the previous applications of the RCT method [19, 27, 40], the HFS has been constructed by merging harmonic force (or voltage) spectra measured at different constant-displacement amplitude levels as illustrated in the previous section. However, in the work of Shivashankar et al. [11], the experimental data consists of the frequency response curves measured by constant-voltage testing, as shown in Figs. 11(a) and 12(a). Luckily, the nonlinearity is not too strong and these curves are very smooth without any jump. Therefore, in this paper, it is demonstrated for the first time that if there is no jump, HFSs can also be constructed smoothly by combining constant-voltage (or force) frequency–response curves with linear interpolation, as shown in Figs. 11(b) and 12(b).

(a) Harmonic displacement spectra measured by constant-voltage testing in the first mode [11] (b) HFS constructed by combining harmonic displacement spectra with linear interpolation for the first mode

(a) Harmonic displacement spectra measured by constant-voltage testing in the second mode [11] (b) HFS constructed by combining harmonic displacement spectra with linear interpolation for the second mode
Once the HFSs are constructed, they are sliced by different constant-displacement amplitude planes to obtain corresponding V-shaped harmonic voltage spectra. By dividing each constant-displacement amplitude value by the corresponding voltage spectrum, constant-response FRFs are obtained, as shown in Fig. 13. Similar to the APA studied in the previous section, constant-response FRFs turn out to be quasi-linear. Accordingly, modal parameters corresponding to the two modes of the stack-type actuator are extracted as functions of displacement amplitude, as shown in Figs. 14 and 15, by applying standard linear modal analysis techniques. Figures 14(b) and 15(b) show that the modal damping ratios exhibit considerably nonlinear behavior, which contradicts the linear damping assumption of the Shivashankar et al. [11]. In both modes, the modal damping ratio increases with increasing response amplitude. It should be noted that in this application a nonlinear viscous damping model is assumed instead of structural damping, just to be able to directly compare it with the linear viscous damping model of [11]. Therefore, the nonlinear modal parameters are identified by using the following receptance formula:

Quasi-linear constant-response FRFs extracted from HFSs for (a) the first mode and (b) the second mode

Nonlinear modal parameters of the stack type-actuator of Shivashankar et al. [11] identified by the HFS for the first mode: (a) natural frequency (b) modal damping ratio and (c) modal constant

Nonlinear modal parameters of the stack type-actuator of Shivashankar et al. [11] identified by the HFS for the second mode: (a) natural frequency (b) modal damping ratio and (c) modal constant
Similar to the APA application in the previous section, the accuracy of the identified nonlinear modal parameters is demonstrated by comparing constant-voltage frequency response curves synthesized from these parameters with the measured data in Fig. 16. The match between the measured and synthesized curves is quite good, which shows the accuracy of the identified modal parameters. In the same figure, frequency response curves are also synthesized by using linear modal damping values of Shivashankar et al. [11]; 0.301% and 0.244% for the first and second modes, respectively. Obviously, the nonlinear damping model predicts frequency response curves considerably better than the linear modal damping assumption, especially at moderate and high voltage levels. It can be concluded that if Shivashankar et al. could use the nonlinear modal damping model in their derivations, they would probably extract the parameters of their physical model more accurately.

Comparison of the measured constant-voltage frequency response curves [11] with the ones synthesized by using nonlinear and linear modal damping ratios (a) first mode (b) second mode
Conclusions
A great majority of work in the literature has focused on characterizing the nonlinear dynamic behavior of patch-type piezoelectric actuators. However, studies about the elasticity of stack-type piezoelectric actuators are quite a few in number. Therefore, their nonlinear dynamic behavior is not yet fully investigated and is still an open research field. An important contribution of this paper is the accurate identification of nonlinear modal parameters and the construction of a reliable modal model of a miniature Amplified Piezoelectric Actuator (APA) by using a recently developed nonlinear modal identification framework, namely the Response Controlled stepped-sine Testing (RCT) method. In the nonlinear mode of interest, the RCT method quantifies about a 130 Hz drop of natural frequency, which corresponds to a 3% frequency shift, and an increase of modal damping ratio from 1.0% to 1.5%, corresponding to a 50% change in the amplitude range of interest. This indicates considerably high stiffness and damping nonlinearities. It is important to note that the accurate identification of nonlinear modal damping is still a challenging issue. The quantification and validation of the nonlinear modal damping of miniature stack-type piezo-actuators are achieved for the first time in this study.
The RCT method has been successfully applied so far on various structures ranging from simple benchmarks to complex engineering systems. However, the applicability of RCT on a miniature electro-mechanical system that incorporates piezoelectric material could not be taken for granted for several reasons: a possible frequency dependence of nonlinearity could degrade the quasi-linearity of constant-response FRFs, a possible low S/N due to considerably low amplitude oscillators could degrade the accuracy of the RCT method and modifications in the implementation of the RCT method by the miniature nature of APA could possibly cause unexpected complications. In this paper, all these issues are clarified, and the applicability of the RCT method on miniature electromechanical devices is successfully demonstrated.
Finally, it is demonstrated in this paper for the first time that if there is no jump (weak nonlinearity), HFS can also be constructed smoothly by combining constant-voltage (or force) frequency–response curves with linear interpolation, and then the HFS can be sliced by constant-displacement planes to obtain quasi-linear constant-response FRFs from which the nonlinear modal parameters including nonlinear modal damping ratio can be identified by applying standard linear modal analysis techniques. This approach is applied to the experimental results of recent work [11], and it is shown that the stack-type actuator studied in that study exhibits considerable damping nonlinearity contrary to the linear damping assumption. It is also demonstrated that the constant-voltage FRFs synthesized by using the identified nonlinear modal damping ratio match with the real experimental data significantly better than the ones synthesized by using the linear damping model of [11], revealing that including the nonlinearity of the damping in stack-type actuators will improve the accuracy of the dynamic model considerably.
References
Ouyang PR, Tjiptoprodjo RC, Zhang WJ, Yang GS (2008) Micro-motion devices technology: The state of arts review. Int J Adv Manuf Technol 38(5–6):463–478
Claeyssen F, Ducamp A, Barillot F et al (2008) Stepping piezoelectric actuators based on APAs. Proc Actuator 2008:623–626
Jing Z, Xu M, Wu T, Tian Z (2016) Development of a tilt-positioning mechanism driven by flextensional piezoelectric actuators. Rev Sci Instrum 87:8
Claeyssen F, Letty RL, Barillot F, Sosnicki O (2007) Amplified piezoelectric actuators: Static dynamic applications. Ferroelectrics 351(1):3–14
APA35XS (2014) Cedrat Technologies, [Online]. Available: https://www.cedrat-technologies.com/fileadmin/datasheets/APA35XS.pdf. [Accessed: 09 Oct 2021]
Kumar A, DasGupta A (2018) Dynamics of a shell-type amplified piezoelectric actuator. J Vib Acoust 140(4):1–9
Tiersten HF (2013) Linear piezoelectric plate vibrations- elements of the linear theory of piezoelectricity and the vibrations of piezoelectric plates. Springer
Parashar SK, Von Wagner U (2004) Nonlinear longitudinal vibrations of transversally polarized piezoceramics: Experiments and modeling. Nonlinear Dyn 37:51–73
Shivashankar P, Kandagal SB (2019) Characterization of elastic and electromechanical nonlinearities in piezoceramic plate actuators from vibrations of a piezoelectric-beam. Mech Syst Signal Process 116:624–640
Shivashankar P, Gopalakrishnan S, Kandagal SB (2019) Nonlinear characterization of piezoelectric patches and piezoelectric stacks from vibrations of piezo-actuated structures. Proc SPIE 10967:1–17
Shivashankar P, Gopalakrishnan S, Kandagal SB (2021) Nonlinear modeling of d33-mode piezoelectric actuators using experimental vibration analysis. J Sound Vib 505
Von Wagner U, Hagedorn P (2002) Piezo-beam systems subjected to weak electric field: experiments and modelling of nonlinearities. J Sound Vib 256(5):861–872
Mahmoodi SN, Jalili N (2009) Piezoelectrically actuated microcantilevers: An experimental nonlinear vibration analysis. Sens Actuators A Phys 150(1):131–136
Goldschmidtboeing F, Wischke M, Eichhorn C, Woias P (2009) Nonlinear effects in piezoelectric vibration harvesters with high coupling factors. Proc PowerMEMS 364–367
Stanton SC, Erturk A, Mann BP, Inman DJ (2010) Nonlinear piezoelectricity in electrostatic energy harvesters: modeling and experimental identification. J Appl Phys 108(7)
Stanton SC, Erturk A, Mann BP, Inman DJ (2012) Nonlinear nonconservative behavior and modeling of piezoelectric energy harvesters including proof mass effects. J Intell Mater Syst Struct 23(2):183–199
Leadenham S, Erturk A (2015) Unified nonlinear electroelastic dynamics of a bimorph piezoelectric cantilever for energy harvesting, sensing and actuation. Nonlinear Dyn 79(3):1727–1743
Shahabi P, Ghafarirad H, Tagvaeipour A (2019) Nonlinear vibration analysis of piezoelectric bending actuators: theoretical and experimental studies. Comptes Rendus Mec 347(12):953–966
Karaağaçlı T, Özgüven HN (2021) Experimental modal analysis of nonlinear systems by using response-controlled stepped-sine testing. Mech Syst Signal Process 146
Scheel M, Peter S, Leine RI, Krack M (2018) A phase resonance approach for modal testing of structures with nonlinear dissipation. J Sound Vib 435:56–73
Sherrit S, Trebi-Ollennu A, Bonitz R, Bar-Cohen Y, Yen JT (2010) Compact sensitive piezoelectric mass balance for measurement of unconsolidated materials in space. Sens Smart Struct Technol Civil Mech Aerosp Syst 7647. SPIE
Cabrera MA, Caicedo B, Thorel L (2012) Dynamic actuator for centrifugal modeling of soil-structure interaction. Geotech Test J 35(4)
Yeom T, Simon TW, Zhang M, North MT, Cui T (2012) High frequency, large displacement, and low power consumption piezoelectric translational actuator based on an oval loop sheel. Sens Actuators A Phys 176:99–109
Pages A, Rowe S, Duc S, Sonsnicki O, Jaussaud G, Claeyssen F (2018) Amplified piezo-actuators (APA) enhancement for active vibration control (AVC). ACTUATOR 2018; 16th International Conference on New Actuators, pp. 1–4
Ling M, Zhang X (2021) Coupled dynamic modeling of piezo-actuated compliant mechanisms subjected to external load. Mech Mach Theory 160
Ling M, Yuan L, Luo Z, Huang T, Zhang X (2022) Enhancing dynamic bandwidth of amplified piezoelectric actuators by a hybrid lever and bridge-type compliant mechanism. Actuators 11(5):134
Karaağaçlı T, Özgüven HN (2020) Experimental identification of backbone curves of strongly nonlinear systems by using response-controlled stepped-sine testing (RCT). Vibration 3(3):266–280
Karaağaçlı T, Özgüven HN (2020) A frequency domain nonparametric identification method for nonlinear structures: Describing surface method. Mech Syst Signal Process 144
Damjanovic D (1997) Logarithmic frequency dependence of the piezoelectric effect due to pinning of ferroelectric-ferroelastic domain walls. Phys Rev B 55(2)
Rosenberg RM (1966) On nonlinear vibrations of systems with many degrees of freedom. Adv Appl Mech 9:155–242
Szemplińska-Stupnicka W (1979) The modified single mode method in the investigations of the resonant vibrations of non-linear systems. J Sound Vib 63(4):475–489
Setio S, Setio HD, Jezequel L (1992) A method of non-linear modal identification from frequency response tests. J Sound Vib 158(3):497–515
Gibert C (2003) Fitting measured frequency response using non-linear modes. Mech Syst Signal Process 17(1):211–218
Peeters M, Kerschen G, Golinval JC (2011) Dynamic testing of nonlinear vibrating structures using nonlinear normal modes. J Sound Vib 330(3):486–509
Londoño JM, Neild SA, Cooper JE (2015) Identification of backbone curves of nonlinear systems from resonance decay responses. J Sound Vib 348:224–238
Renson L, Gonzalez-Buelga A, Barton DAW, Neild SA (2016) Robust identification of backbone curves using control-based continuation. J Sound Vib 367:145–158
Peter S, Leine RI (2017) Excitation power quantities in phase resonance testing of nonlinear systems with phase-locked-loop excitation. Mech Syst Signal Process 96:139–158
Krack M (2015) Nonlinear modal analysis of nonconservative systems: extension of the periodic motion concept. Comput Struct 154:59–71
Scheel M, Weigele T, Krack M (2020) Challenging an experimental nonlinear modal analysis method with a new strongly friction-damped structure. J Sound Vib 485
Karaağaçlı T, Özgüven HN (2022) Experimental quantification and validation of modal properties of geometrically nonlinear structures by using response-controlled stepped-sine testing. Exp Mech 62:199–211
Arslan Ö, Özgüven HN (2008) Modal identification of nonlinear structures and the use of modal model in structural dynamic analysis. In Proceedings of the 26th International Modal Analysis Conference (IMAC), Orlando, FL, USA
Link M, Boeswald M, Laborde S, Weiland M, Calvi A (2010) An approach to nonlinear experimental modal analysis. In Proceedings of the 28th International Modal Analysis Conference (IMAC), Jacksonville, FL, USA
Tanrıkulu Ö, Kuran B, Özgüven HN, İmregün M (1993) Forced harmonic response analysis of nonlinear structures. AIAA J 31(7):1313–1320
Krack M (2021) Extension of the single nonlinear mode theory by linear attachments and application to exciter-structure interaction. J Sound Vib 505
Pacini BR, Kuether RJ, Roettgen DR (2022) Shaker-structure modeling and analysis for nonlinear force appropriation testing. Mech Syst Signal Process 162
Renson L, Shaw AD, Barton DAW, Neild SA (2019) Application of control-based continuation to a nonlinear structure with harmonically coupled modes. Mech Syst Signal Process 120:449–464
Abeloos G, Renson L, Collette C, Kerschen G (2021) Stepped and swept control-based continuation using adaptive filtering. Nonlinear Dyn 104:3793–3808
Instruction Manual optoNCDT 2300 (2021) Micro-epsilon messtechnik GbmH & Co. KG [Online]. Available: http://www.micro-epsilon.de/download/manuals/man--optoNCDT-2300--en.pdf. [Accessed: 09 Oct 2021]
Acknowledgements
This research was funded by ASELSAN Inc. The financial support is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Koyuncu, A., Karaağaçlı, T., Şahin, M. et al. Experimental Modal Analysis of Nonlinear Amplified Piezoelectric Actuators by Using Response-Controlled Stepped-Sine Testing. Exp Mech 62, 1579–1594 (2022). https://doi.org/10.1007/s11340-022-00878-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-022-00878-y