
Abstract
The cooperation between the nodes is one of the potential factor for successful routing in mobile ad hoc networks. The non-cooperative behaviour of the node disturbs the routing as well as degrades network performances. The non-cooperativeness is due to the resource constraint characteristics of a mobile node. The battery energy is an important constraint of a node because it exhausts after some period. On the other side, the mobility of nodes also affects routing performances. Hence, this work concentrates on evaluating cooperation of a node by probing future node energy and mobility. This paper proposes a futuristic cooperation evaluation model (FUCEM) for evaluating node reliability and link stability to establish effective routing. The FUCEM model examines influencing factors of cooperation and state transition of nodes using Markov process. Node reliability and link stability manipulated through the Markov process. The Markov process helps in fixing the upper and lower bounds of the cooperation and calculates the cooperation factor. The NS2 simulator simulates the proposed work and evaluates performance results with different scenarios. The result indicates that the proposed FUCEM has 13–21% higher packet delivery ratio than other algorithms. The remaining energy of the nodes increases to 6–7% as compared with the existing algorithms in a higher mobility scenario. Further, it significantly improves the results of routing overhead and average end-to-end delay than the existing models.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In MANETs, routing is the major network operation to establish communication among mobile nodes. The MANET has the characteristics of non-centralized, dynamic network topology, dynamic mobility, and limited resources [1]. Battery energy is one of the main resource constraints of a mobile node in MANET. In many cases, the battery energy of a node exhausts after routing path discovery. It results in unsuccessful or partial packet delivery. Energy limitation of a node makes the routing as a challenging task. The dynamic behaviour of a mobile node produces link stability issues in the network; since it does not has any central administration in the network. The rapid mobility of node produces packet loss and reduces the network lifetime due to link breakage of the routing path. Likewise, the state transitions of a node from the cooperative to selfish radically affect the reliability of the network [2]. The network has the vulnerability to malicious attacks, communication link faults, and other environmental influences. These things affect the neighbour node cooperation as well as the routing of the network.
In the recent decade, many researchers have devoted their research work to analyse the cooperation level of a mobile node in different scenarios. The connectivity between the source and the destination depends on the degree of neighbour node cooperation. The non-cooperative node does not participate in the routing to preserve its energy. Whenever the non-cooperative node receives the route-discovery request packet, it accepts and replies by the response packet; but it does not actively forward the data packets while routing. Thus, the partial cooperation or the non-cooperation of a node results in unsuccessful packet delivery in the network. Several existing research work intends to encourage the cooperation of a node by game theory or assigning reputation values or rewards for the participation of nodes in the routing. Various existing research articles concentrate on detecting, preventing the intrusions, attacks, selfish activity, and mitigating selfish nodes. To the best of our knowledge, none of the research work focuses on the state transitions of a mobile node from cooperative to the non-cooperative state for assessing active nodes to participate in the routing. Many of the works are related to determining the familiar performance metrics or the shortest path; thereby not concentrating on strengthening the routing discovery process by the node’s resources such as energy/speed. In this paper, the proposed model evaluates the degree of cooperation of a node based on its residual energy, energy-draining rate, and mobility-speed. Thus, this model considers the speed and energy of intermediate nodes to offer reliable route discovery. The proposed semi-Markov process evaluates co-operative, partial, and non-cooperative state-transitions of the mobile node. To improve the routing, the significant contribution and advantages of the proposed FUCEM are as follows:
-
The proposed FUCEM investigates the node reliability based on the residual energy of the node. It analyses the speed and topology of the mobile nodes to determine an efficient routing path and to facilitate resource-based routing.
-
Further, it evaluates the futuristic cooperation states of the node using semi-Markov process.
-
The FUCEM explores both energy and mobility metrics together to design an effective cooperative routing protocol in MANET.
-
It has the advantage of reducing the frequency of routing path discovery (due to lower mobility nodes) and thus reduces routing overhead.
-
The proposed FUCEM emphases to overcome the limitations of the existing literature by incorporating both energy and mobility factor of the node. It facilitates the reliable and stable cooperative routing using the auto-regressive integrated moving average (ARIMA) model.
The remaining of the paper organized as follows. Section 2 briefly discusses the cooperation issues and solutions from various literature in MANET. Section 3 describes the proposed futuristic cooperation evaluation model and state transitions of the node. Section 4 presents the influences of FUCEM in node cooperation and evaluates the simulation results. Moreover, it presents the performance analysis of different scenarios with node reliability and link stability factors. Finally, Sect. 5 concludes the paper with future enhancements of this research.
2 Related works
This section discusses the recent literary works dealing with various developments of cooperative routing in MANETs. Existing work contributes to design routing methodologies, cooperation stimulation approaches—trust, reputation, acknowledgement methods, or Quality of Service (QoS) issues, mitigating routing attacks—malicious or selfish attacks. In this paper, we study research works related to resource-constraint issues in ad hoc networks and designing routing protocols based on the influencing factors such as energy, mobility, and trust values.
Shivasankar et al. [3] proposed an efficient power-aware routing (EPAR) to solve the energy efficiency problems of individual nodes. It adopts min–max formation to transmit the packet and handles the high mobility nodes in the dynamic topology. However, this paper considers only link breakages due to the energy of a node. This paper does not concentrate on the external malicious attack and security concerns of the network. It makes the mobile node as anonymous. To increase the lifetime of the network Rashid et al. [4] presented mobility and energy-aware routing. It selects higher residual energy and lower mobility nodes for routing. It makes the node to survive a longer period for the successful routing. It should consider the rate of energy consumption for the efficient node selection for routing. However, this paper does not evaluate the performance against the various speed of node; and does not discuss the mobility parameters.
Further, Samundiswary [5] developed a trust-based energy-aware reactive routing protocol for wireless sensor networks (WSNs). It advertises trust value along with the route reply packet. Based on the route trust and node trust the source node computes the advertised and observed trust value. Although, this paper does not address performance metrics-routing overhead, the energy consumption of each node, and end-to-end delay. Again, trust-based energy-aware routing protocol proposed by the authors Pushpalatha et al. [6]. It selects the routing node based on higher trust and maximum residual energy with a reliability parameter. The source-node only selects the nodes with higher reliability value. However, it does not evaluate mobility, scalability factors, performance metrics, and does not compare with other related routing models. Sengathir and Manoharan [7] had proposed a futuristic trust coefficient based semi-Model prediction model to assess the network survivability over the selfish activity. It adopts the non-birth-death process. However, this article does not study the influence of rapid mobility of the node, which severely affects the cooperation of nodes; also, this paper does not evaluate partial co-operating factor of a node.
Fuzzy logic prediction adopted by Jayalakshmi and Razak [8] to enhance the security and protect from vulnerabilities. It considers higher trust and residual power values to develop dynamic source routing (DSR) integrated trust based power-aware DSR (FTP-DSR) routing protocol. Each node calculates its trust value using routing history, weights of forwarding ratio, similarity factor, trust record list, and time-ageing factor. However, this work does not analyse false positive and negative to assess trust and energy values. To solve the broadcast storm problems and to reduce the contention, redundancy, collision problems the mobility and load-aware routing (MLR) presented in [9]. The MLR intends to restrict the flooding and rebroadcasting messages. Instead, the basic ad hoc on-demand distance vector (AODV) protocol, the MLR scheme should compare with another algorithm. This paper does not analyse the energy and scalability of the nodes. The link stability and energy-aware routing (LEAR) protocol [10] presents an effort to save energy and path duration using multi-objective integer linear programming optimal model. The greedy bi-objective integer programming adopted to estimate the feasible solution. It assesses the link stability, energy, and traffic load for the development of LEAR protocol. However, LEAR does not focus on the mobility of nodes. To isolate selfish nodes Manoharan and Sengathir [11] proposed an Erlang coefficient based conditional probabilistic model for MANET. Genuineness and non-cooperative factors decide to isolate the selfish nodes. The Erlang distribution estimates the failure rate of the routing path using independent exponential random variables. However, this work does not evaluate false positives/negatives.
The article [12] studies the Degree of Trust (DoT), energy level, and connectivity to develop an adaptive fuzzy DoT threshold routing algorithm (AFTRA). It discovers the shortest routing path and excludes malicious or selfish nodes. It takes nodes in-out ratio for packet forwarding and previous forwarding history for the calculation of DoT. Nonetheless, the trust evaluation does not deliberate this paper. The paper [13] presents a heuristic method for routing using the minimal battery and transmission power of the node. The power and mobility aware protocol aims to restrict the control packet flooding and link breakages due to the mobility of the node. It assumes each node consists of a global positioning system (GPS) or some other location-aware technique.
The article [14] presents the MQ-Routing to improve the lifetime of the battery in the dynamic network topology. The proactive MQ-Routing evaluates path availability, topology changes, and then modifies the Q-routing reinforcement-learning algorithm. In [15], artificial neural network (ANN) adopted to predict the delay of packet delivery in MANET. It develops the generalized regression neural network (GRNN) for the familiar on-demand routing protocols. The training process assesses the parameters such as path length and an average number of neighbour nodes. The actual and predicted delay confirms the ANN–GRNN algorithm performs better than the radial basis function (RBF) model. Nevertheless, it does not examine the suitability of the GRNN in dynamic environments.
The article [16] reduces the air interference between the radio signals of the node using mobility prediction in MANET. It designs the mobility models by assessing the past location and mobility patterns of nodes. The ANN-feedback forward algorithm, Jorder, Elman, and hierarchical Elman network trains this work. The theoretical analysis displays that the Elman network has better results in the location prediction than the conventional methods. However, it does not implement/analyses of the proposed work. In [17] link-stability prediction technique had presented based on signal strength. This work modifies the conventional AODV protocol for the implementation. It accounts for the changes of radio signal strength for the link stability and mobility prediction. It compares the performance results only with the conventional AODV protocol. It should compare with existing advanced versions of AODV and other on-demand routing protocols. This paper misses the analyses with different existing algorithms. The article [18] applies the Markov renewal process (MRP) to predict the link availability and link-state behaviour using sojourn time distribution. It analyses the prediction results for three pair of nodes using the Markov chain and MRP. The results depict that the MRP produces higher prediction accuracy than the Markov chain. However, it does not address the overheads incurred in the predictions; also, it lacks in the implementation of the proposed work in the mobile ad hoc environment.
The work in [19] predicts the mobility pattern and future location of nodes using the eye of coverage approach in the MANET. The simulation results depict that the predicted future location and actual mobility patterns are similar, but it does not analyse the performance metrics. The [20] predicts the availability of resources such as energy, buffer-space, and bandwidth for resource-based QoS routing in MANETs. It adopts the wavelet neural network (WNN) for the future resource prediction. However, it does not address the overheads of predictions as well as it does not compares the proposed work with the conventional methods.
The article [21] had proposed new AODV (NAODV) protocol to determine the optimal routing path based on the energy level of the nodes in MANET. The proposed methodology is not clear and has higher control overhead than AODV and DSR. A fault-tolerant topology control using ant colony optimization (ACO) and neural network (SwarmFTCP) proposed in [22]. The SwarmFTCP aims to forecast the mobility patterns of the nodes for the clinical care data transmission. It states that the mobility prediction model determines the routes based on minimum interference and transmission power. However, it does not indicate/examine the cost of predictions. Lai and Liu [23] had proposed safe-time technique to minimize the overheads of shared data in the mobile peer to peer networks. This method had intended to improve the data dissemination rate by considering the neighbour node’s location, speed, network connectivity, and accessing frequency of the shared data item. The authors had produced results with minimized retransmissions and a reduced number of redundant messages, accordingly decrease the overhead.
In [24] authors had developed the opportunistic routing (OR) methodology instead of traditional routing process; that is forwarding packets via the determined routing path. In OR, the candidate nodes are selected for the next-hop forwarding process through the transmission medium. Authors had shown that the use of OR reduces delay and overheads in routing. Wu et al. [25] had used the link duration metric to evaluate the mobility effects of the multihop mobile networks. They developed an analytical model based relative speed, angles, velocities between the two nodes, the distance of link, and node’s transmission range. The results are evaluated with random waypoint, random walk, and group movement models.
In this work [26] authors had proposed a lightweight cluster-based routing model for the MANETs to minimize unwanted load on the cluster-head by evaluating the node’s degree and remaining power. Mitra et al. [27] were intended to develop a hierarchical proactive routing protocol for the wireless sensor networks (WSN) with controlled mobility. They had taken the hop counts and data generation rates of sensor nodes for the delay bound applications. In [28], authors had proposed opportunistic routing protocol for the unmanned aerial vehicle (UAV) assisted WSN. The proposed all neighbours opportunistic routing, forwards packets to all neighbours and highest velocity opportunistic routing, forwards them to one neighbour with the highest velocity. This work selects the route dynamically on a pre-transmission basis. The authors in [29] had presented an on-demand mobility and direction aware AODV routing protocol. Based on the mobility and direction for stable routing and to reduce the link breakages. It works as tree-based mobility-aware routing. However, battery-energy effects are not concentrated in these works.
3 The FUCEM model
This section presents the steps involved in the design and development of the proposed FUCEM model for the MANET. It discusses co-operation level and state transitions of nodes over different states using semi-Markov process. Further, it describes the methods for evaluating node reliability and link stability.
The proposed FUCEM model works based on a semi-Markov process. It evaluates the cooperation level of the mobile node using the reliability factor. The semi-Markov model is a more suitable model to design different states of nodes in MANET. The semi-Markov process easily models the features and properties of the mobile ad hoc nodes. It has the feasibility to model the various behaviour of the nodes as states. The semi-Markov model chosen for the design of the FUCEM because the proposed work does not consider the reverse transition of nodes. The proposed model presents the forward transition of the nodes only.
The forwarding ability of a node classifies its cooperation level into three categories: highly cooperative, partially cooperative, and non-cooperative. The highly cooperative nodes forward both control and data packets without any deviation or dropping and actively participate in the routing. The partial cooperative node has the opportunity to drop the packets dynamically at any time and does not actively participate in the routing. The non-cooperative node does not forward any received data packets, but it remains in the routing network. Thus, the characteristics of partial/non-cooperation of nodes depend on resource constraints, external malicious attack, heavy load, higher mobility, or rapid draining energy level [30, 31]. The FUCEM evaluates the co-operation level of a node in MANET by the following strategies.
-
1.
Modelling transition states using Markov process
-
2.
Evaluation of state properties
-
3.
Determination of node reliability based on energy
-
4.
Estimation of link stability based on mobility
-
5.
Manipulation of the FUCEM for reliable and stable cooperative routing
3.1 Modelling transition states using Markov process
The node transitions among different state depend on its remaining energy, mobility, or bandwidth availability and environmental constraints such as interference, attenuation, fading etc. Let consider the transition states of a mobile node as a stochastic process in MANET. A stochastic process is a semi-Markov process where the numerical value of the system (node) changes dynamically over time. Therefore, each node considered as a mathematical object and their associated characteristics considered as a random variable. Similarly, node characteristics such as energy and mobility are changes dynamically over time in MANETs. A stochastic process predicts the transition states of a node using its present state and conditional probability distribution. Such that, a semi-Markov process ‘Xt’ depends on the past states and t ≥ 0, (i.e. Xt: t ≥ 0) where ‘t’ is the random variable. Thus, semi-Markov chain (Xn) is a sequence of the semi-Markov process which depends on preceding behaviours such as {Xn−1, Xn−2, …, X0} for predicting future behaviour. Similarly, it evaluates present states of the node based on past behaviours of the node (such as energy, mobility, and cooperative level). The Markovian decision process (MDP) evaluates the transition of the node.
3.2 Evaluation of state properties
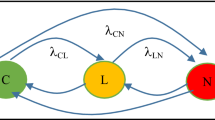
The influencing factors causing the transition of node states from H to P to N are determined using conditional probability distribution and semi-Markov process. The FUCEM is a distributed mechanism for estimating reliability and link stability of nodes. It calculates the energy values and cooperation factors for each mobile node despite any central node. The resulting cooperation factor quantifies the impact of the node as the cooperation level. The Fig. 1 illustrates the state transition model based on node behaviours for evaluation of the node’s cooperation. Figure 1 depicts the three states of the transition of a node: highly cooperative (H), partially cooperative (P), non-cooperative (N) based on the semi-Markov process. This model does not concentrate on the reverse transition that is non-cooperative into highly cooperative (N => H) or partial cooperative (N => P), and (P => H). The λHP, λHN, and λPN state values designate the exact transition of states among different cooperation level. The MDP evaluates the node states and its transitions using the following properties.

State transitions of the node
-
1.
C is the finite set of states defines the cooperation level of a node, then the node in the MANET has majorly three states (i.e.) C = {H, P, N}.
-
2.
T is a finite set of transitions for states \( C\left\{ {H, P, N} \right\} \), thus \( T = \left\{ {\lambda_{HP} ,\lambda _{HN} ,\lambda _{PN} } \right\} \).
-
3.
The state {H} has the transitions as \( H = \left\{ {\lambda_{HP} ,\lambda _{HN} } \right\} \) and the state {P} has the transition as \( P = \left\{ {\lambda_{PN} } \right\} \).
-
4.
\( Pr\left( {\lambda_{HP} } \right) \) is the probability that transition \( \uplambda_{HP} \) in state {H} at time ‘t’ will lead to state {P} at time t + 1.
$$ Pr\left( {\lambda_{HP} } \right) = Pr{\text{\{ }}H_{t + 1} = P | H_{t} = H,\uplambda _{t} = \uplambda_{HP} \} $$ -
5.
\( Pr\left( {\lambda_{HN} } \right) \) is the probability that transition \( \uplambda_{HN} \) in state {H} at time ‘t’ will lead to state {N} at time t + 1.
$$ Pr\left( {\lambda_{HN} } \right) = Pr{\text{\{ }}H_{t + 1} = N | H_{t} = H,\uplambda _{t} = \uplambda_{HN} \} $$ -
6.
Similarly, \( Pr\left( {\lambda_{PN} } \right) \) is the probability that transition \( \uplambda_{PN} \) in state {P} at time ‘t’ will lead to state {N} at time t + 1.
$$ Pr\left( {\lambda_{PN} } \right) = Pr{\text{\{ }}P_{t + 1} = N | P_{t} = P,\uplambda _{t} = \uplambda_{PN} \} $$
The state N does not have any transitions in this scenario because the node drains in this state. When the node’s battery power is recharging, then the state N can have the transition to states P or H, but this work does not focus on it. Table 1 presents the parameters and symbol definitions used in the work.
3.3 Determination of node reliability
The node reliability evaluated based on energy dissipation of a node. The energy dissipation occurs during packet transmission, reception and in overhearing activities. Let consider the network as an undirected weighted graph (G) with ‘V’ vertices (mobile nodes) and ‘E’ edges (wireless links). That is G = (V, E); mobile nodes are vertices and edges connect the vertices. This work considers the following key factors to determine the cooperation level of a node. First, the residual energy of a node; it is the key parameter to estimate the reliability of the node. Second, the energy required to forward and receive the packets from other nodes and finally, the draining rate of the energy of a node. Meanwhile, these values estimate the lifetime of the node. The Algorithm 1 gives the pseudo-code steps to estimate the node reliability (λ_R) of the node. First, to calculate the reliability (λ_R) of a mobile node, it computes the residual energy (E_res) of the node; then if the E_res value is greater than one then it computes the required energy for transmission (E_transmit) and reception (E_receive) of each packet (The packet which is intended to forward or receive). Based on these values it estimates the node reliability (λ_R) value of the node.

The energy required to transmit (E_transmit) a packet from source to destination is calculated using the following equation, where the \( E\_t_{1} \) represents the energy required to transmit one packet to the destination node. Similarly for \( E\_t_{2} \) and ‘n’ represents the number of packets. ‘Np’ represents the total number of packets.
The Eq. (2) calculates the energy required to receive a packet (\( E\_receive \)) from any node.
Therefore, \( \lambda \_R \) calculates the node reliability using\( E\_transmit \), \( E\_receive \), E_o, and residual-energy (E_res) values, where E_o is the energy dissipated due to overhearing. The \( \lambda \_R \) as follows in (3)
The node reliability \( (\lambda \_R) \) value from Eq. (3) categorises the cooperativeness of each node in the routing path as H or P or N. If the node reliability is greater than 0.5, (i.e.) \( H = \lambda \_R > 0.5 \;(50\% ) \) then the node is classified as highly cooperative (H). The transition of the state from H to P occurs (λHP) if the \( \lambda \_R \) value falls below 0.5 (i.e.)\( \lambda \_R < 0.5 \) as shown in Fig. 1. Similarly, it calculates the other state transitions as follows. The node’s reliability factor value falls in between the range of 0.5–0.2, then the FUCEM categorises it as a partial cooperative (P) node i.e. \( P = 0.2 < \lambda \_R < 0.5 \). In Fig. 1, the transition of the state from P to N (λPN) occurs if the \( \lambda \_R \) value goes further below to 0.2 (i.e.)\( \lambda \_R < 0.2 \). Then it classifies the node as a non-cooperative node (N). The node reliability (\( \lambda \_R \)) value falls below 0.2 (i.e.) \( \lambda \_R < 0.2 \) then the transition of the state from H to N occurs (λHN) as illustrated in Fig. 1 [32].
3.4 Estimation of link stability
The mobility of node majorly affects the wireless connectivity between other nodes. If a high-speed node designated for routing, then there is much possibility to occur link breakages between the nodes frequently. Because, when the routing in progress, the high-speed node may move beyond the source coverage area. Therefore, it is necessary to exclude a high-speed node from participating in the route discovery or routing process. It makes the necessity of finding a more stable node. The lower mobility nodes could reduce frequent link breakages due to rapid mobility and thus reduces routing overhead. This paper proposes the link stability factor to discover low mobile and stable nodes. The proposed work considers the scalar (speed) mobility value of the node. This work does not consider the mobility direction (velocity) and relative velocity of the node. The ARIMA model incorporated for the determination of the futuristic mobility speed of nodes in MANET. ARIMA model has three tuples as (p, d, q); where ‘p’ represents the number of time lags; ‘d’ indicates the number of times the data (speed) has been subtracted from past values; ‘q’ denotes the order of moving average method. Let consider a time series of data ‘\( SV_{t} ;\;\;t > 0 \)’, then the Eq. (4) gives the \( ARIMA (p,d,q) \) model as follows [30, 33]
where \( SV_{t} \) denotes several speed values in a time series; \( \alpha_{i} \) is the autoregressive part (i.e.) the subtraction of previous speed values of a mobile node; \( T^{i} \) is the number of time lag operations; \( \varepsilon_{t} \) is the error factor, it is assumed as a distributed independent sample value with a normal distribution and zero mean; \( \theta_{i} \) is the moving average term of speed values. A factor of \( (1 - T) \) with multiplicity ‘d’ is a unit root, which is assumed with the polynomial \( \left( {1 - \mathop \sum \limits_{i = 1}^{{p^{\prime } }} \alpha_{i} T^{i} } \right) \) and p assumed as a polynomial factor of \( p^{\prime } - d \) [30, 33]. It results as follows
These will formulate the ARIMA (p, d, q) model with the drift rate ‘\( \delta \)’ and the final model is modified as (5),
The Eq. (5) calculates and models, the futuristic speed value of a mobile node as a link stability metric of the FUCEM model. For example, to estimate the link stability (\( \lambda \_S \)) let consider the MANET as the weighted undirected graph and the nodes are assigned with certain weights (speed) as 1–50 m/s. The FUCEM model calculates the link stability \( (\lambda \_S) \) of a node based on the speed of the nodes in different sessions. Let consider ‘T’ as the maximum time and as a disjoint set with the ‘n’ different time value of ‘t’ likewise given in the Eq. (6) and Ns is the number of speed samples. The ‘n’ should be less than the simulation time. Then, the Eq. (7) gives the link stability (\( \lambda \_S \)) of a node [30, 33].
The Eqs. (5) and (7) drives the link stability (\( \lambda \_S) \) of a node using the ARIMA model [34]. The Algorithm 2, provides the pseudo code steps to estimate the link stability (\( \lambda \_S \)) of a node. The link stability is estimated by (1) computing the futuristic speed values of each mobile node (MS) at different time session (T) using ARIMA. (2) If the MS value is less than 30, then it computes the link stability \( (\lambda \_S) \) value of the node. (3) In certain situation, all node’s MS value is greater than 30 then the node with the lowest MS value ranging from 30 to 40 is selected for the \( \lambda \_S \) computation. (4) In extreme case, when all node’s MS value is above 40, then the lowest MS value among the node will be taken for the \( \lambda \_S \) computation.
The \( \lambda \_S \) value classifies the nodes as normal mobility node or rapid mobility node. For example, let consider the threshold speed of a node as 30 m/s. Henceforth, FUCEM model considers a node as highly cooperative (H) node, if it has the λ_S value of less than 30 m/s (λ_S ≤ 30). The MS value of the node is between 30 and 40 then the node is considered as partial cooperative (P) and nodes with above 40 MS are considered as non-cooperative (N). In case MS value of all nodes is larger than 30 m/s then the FUCEM considers all nodes as high mobility nodes. Subsequently, it selects the lowest mobile node among these mobile nodes for routing from source to destination with the shortest path.

3.5 Manipulation of the FUCEM model
The FUCEM model formulated based on the residual energy and mobility speed using semi-Markov process. The derivation (3) and (7) gives the calculation for quantifying a node as highly/partial/non-cooperative node based on node reliability and link stability factors. It supports the FUCEM to perform the routing. The FUCEM model discovers the nodes to perform reliable routing based on the following criteria. (1) It should be highly cooperative that is reliability (\( \lambda \_R \)) of the node is greater than 50 and link stability \( (\lambda \_S) \) is less than 30 (i.e.\( \lambda \_R > 50\;{\text{and}}\;\lambda \_S \le 30 \)). (2) If the first criteria fail, it goes to the second criteria that is \( 20 < \lambda \_R < 50 \) and \( 30 < \lambda \_S < 40 \). Table 2 illustrates the assumption of the FUCEM for evaluating the node as highly cooperative (H), partially cooperative (P), and non-cooperative (N). Figure 2 shows the state transitions of the mobile node based on link stability and node reliability to evaluate the highly cooperative condition.

Flow of transition states of node in FUCEM
In Fig. 2, a node is in an idle state and intends to receive a packet to transmit to the destination. Then, based on the semi-Markov process it evaluates λ_R and λ_S values to decide whether it has sufficient energy and moderate mobility to forward the packet to the destination. When the λ_R and λ_S values of the node satisfy the FUCEM conditions then it considers the corresponding node as the highly cooperative node. The state of the node changes into active-state from idle-state, whenever the node successfully receives the packet to transmit to the destination. Subsequently, the packet transmission occurs through the highly cooperative node. Whenever the node does not satisfy λ_R and λ_S conditions of FUCEM, then the node turns back to the idle state. Thus, it does not a highly cooperative node.
4 Simulation and performance analysis
This section explains the simulation environment, simulation parameters, energy parameters, and simulation scenarios of the proposed FUCEM in mobile ad hoc networks.
4.1 Simulation environment
The following computer environment implements the proposed work: Intel Core i3 processor with 2.40 GHz, 3 GB of RAM memory, and Ubuntu-12.4 version 64-bit as the operating system. The proposed work constructs the mobile ad hoc network to implement the FUCEM and to experiment a different set of scenarios. As per the characteristics of MANET that is without any pre-existing infrastructure, the following simulation environment develops the routing protocol by incorporating the FUCEM features and properties of the proposed work. The simulation model constructs randomly placed 50 nodes in a 1000 × 1000 m2 area with the dynamic network topology. Each node in the network has a radio propagation range of 150 m with the Omni-directional antenna and the channel capacity is two Mbps. The Random Waypoint (RWP) mobility model provides the movement to the nodes in the network. The nodes in the RWP model move from one waypoint to another waypoint in a zigzag line. The waypoints distributed uniformly over the simulation area. The mobile nodes move randomly based on a given maximum/minimum speed, direction, and destination parameters. The positive minimum speed has been set to avoid speed decay [35].
The nodes start moving to the destination waypoint by pausing a few seconds in the beginning. After reaching the destination, the node again pauses a few seconds and then selects a new destination waypoint and moves towards the waypoint. Similarly, the node movement process continues until the end of the simulation. The mobility scenario generation and analysis tool, BonnMotion [36] generates the movements to the RWP model. The node moves according to the RWP Model with varying speed from zero to 50; the BonnMotion tool assigns its movements randomly. The speed limits of the nodes are set to 0 m/s as minimum speed and 50 m/s as maximum speed; the pause time is 100 s for all of the experiments presented in the paper. The maximum simulation time is 100 s for the experiments. The motion of the node starts at the pause time 0 s and the node becomes stationary at pause time of 100 s. Constant bit rate (CBR) gives the network traffic for the proposed model with the packet size of 128–1024 bytes. It generates the network traffic for ten sets of random source-destination pairs at the interval of 10 s for all scenarios. The proposed work analyses its performances at various intervals and with an increasing number of nodes. The FUCEM evaluates the cooperative performance of the nodes at the speed 10, 20, 30, 40, 50 m/s and the number of nodes at 10, 20, 30, 40, 50.
4.2 Simulation of the FUCEM model
In the phase, the network simulator (NS-2.35) tool [37] simulates the proposed FUCEM model in MANET. The medium access and network layer of the ns2.35 simulator comprise the proposed procedures and schemes. In the beginning, the AODV routing protocol discovers the routing path (nodes). After that, based on the futuristic availability of the resources the proposed FUCEM predicts the routing nodes and periodically updates the routing path. Table 3 presents the simulation parameters and simulation environment for different experiments. Table 4 summarises the energy model parameters and values adopted for the proposed research work. The tool command language (TCL) configures the energy values in the simulation script. The proposed equations such as 1, 2, 3, 5 and 7 derive, develops, and interferes with the NS2 modules using the C++ language, Otcl scripts, and TCL script for the implementation of the reliability and link stability algorithms. It takes input values from the node’s routing table and routing history. The AWK [38] script processes the output trace files. The AWK script converts the traces into the required format.
Let consider the prediction of the future speed values of a node as a nonlinear autoregressive problem. As mentioned earlier, this work adopts the ARIMA model to predict the future speed values of the node using the time-series tool [39]. It predicts the series ‘x(t)’ given ‘d’ past values of ‘x(t)’. It takes the speed values of 110–130 timestamps of the node as the target time series (input) for the ARIMA prediction process. It takes the data matrix (timestamp × speed) and randomly divides it into two data matrices for training and testing. The training dataset regulates the network according to its error. The testing dataset independently measures network performance during and after the training [15]. The ARIMA process evaluates the speed prediction model by varying the number of delays and channels.
Thus, the ARIMA defines the problem as \( x(t) = f(x(t - 1), x(t - 2), \ldots ,x(t - 5)). \) ARIMA trains the given dataset and stops the training when the mean square error (MSE) increases [15]. It examines approximately 10 models such as (1, 1, 2), (1, 2, 1), (1, 2, 2), (2, 1, 1), (2, 1, 2), (2, 2, 1), (2, 3, 2), (2, 3, 3), (3, 2, 2), and (3, 2, 3) for the prediction as illustrated in Table 5. In Table 5 the lowest Akaike information criterion (AIC), Bayesian information criterion (BIC), and correlated AIC (AICc) values correspond to stationary values of the dataset. Table 5 highlights the lowest model that is (2, 2, 1) model with the boldface. The stationary model’s (2, 2, 1) corresponding auto-correlation function (ACF) and partial ACF (PACF) values are given in Fig. 3. The confidence interval for the (2, 2, 1) is 95%; such that most of the dataset falls under the confidence level.

ACF and PACF of model (2, 2, 1)
The AIC, BIC, AICc, ACF, and PACF calculation gives the stationary and reliable quality dataset for future speed prediction. Figure 4 depicts the predicted speed values using ARIMA (based on the highlighted (2, 2, 1) dataset depicted in Table 5) in comparison with RWP observed speed values in a time-series. Here, it takes the first 100 s of RWP mobility dataset for training using ARIMA; it also considers the next 100 s of RWP dataset as the target mobility dataset to compare with the ARIMA predictions and Fig. 4 illustrates this scenario. It clearly depicts that the ARIMA predictions are almost matches with the target dataset. Table 6 gives the error metrics such as MSE, root MSE (RMSE), mean absolute error (MAE), mean absolute relative error (MARE), and root mean square relative error (RMSRE) of the ARIMA predictions.

Predicted speed by ARIMA versus RWP observed speed
Packet format of the FUCEM:
Table 7 represents the packet format of the proposed FUCEM. The source and destination node ID are the first two fields and carry 2 bytes each. The next field is the hop count; it lists the number of nodes connected to the particular node within its transmission range. It has 1 byte. The fourth field is the Data Forwarding Status (DFS); it occupies 4 bytes. We added two fields that are a fifth and sixth field to represent the λ_R and λ_S values of the FUCEM. The Fifth field (λ_R) carries information about node reliability values. The sixth field (λ_S) has the values of link stability. Each mobile node has to carry these two fields with λ_R and λ_S values for the discovery of higher cooperative mobile nodes for routing. The last filed is the default frame check sequence (FCS); it carries the error correction and detection values [16].
4.3 Performance evaluation
The different simulation scenarios analyse the proposed FUCEM algorithm and compare its performance results with MLR [9], AFTRA [12], FTP-DSR [8], TQR [40], Conditional Max-Min Battery Capacity Routing (CMMBCR) [41], TDSR [42], DSR, and AODV algorithms. The proposed work is similar to the works presented in [8, 9, 12, 40,41,42] algorithms. Thus, this work chooses AFTRA, FTP-DSR, TQR, CMMBCR, TDSR, DSR, AODV, and MLR algorithms for the comparison of the proposed results. The MLR algorithm deals with the mobility aware routing using MDP. Hence, the FUCEM chooses MLR to compare and analyse the speed prediction results of FUCEM by changing the speed (m/s) values. Figure 5 depicts the performance results of FUCEM, MLR, TQR, and AODV algorithms. It shows that the results of different metrics by varying node speed. The AFTRA algorithm presents an energy-aware routing using fuzzy logic. It analyses the energy metrics for routing in resource-constraint environments. Thus, the node reliability (energy) results of the FUCEM model compares with the AFTRA results. Figure 6 illustrates the comparison results of these two algorithms by varying the number of nodes. The proposed FUCEM analyses the performance metrics such as average energy consumption, packet delivery ratio (PDR), routing overhead (RO) and average end-to-end delay in comparison with CMMBCR, AFTRA, TDSR, DSR and AODV [12] algorithms.

Performance metrics versus varying node speed

Performance metrics versus varying number of nodes
4.3.1 Performance metrics versus varying node speed
In this scenario, the number of nodes is 50 and the maximum speed increases by 10 m/s regularly for every 20 s as 10, 20, 30, 40, 50 m/s from the start of simulation time as shown in Fig. 5. It illustrates the average remaining energy of nodes over different mobility speeds. It depicts the node’s remaining energy behaviours for the FUCEM, MLR, TQR, and AODV algorithm with the speed values 10, 20, 30, 40, 50 m/s. It observes the changes in the energy of the nodes as joules (J). In the Fig. 5a, when the node speed increases then the FUCEM, MLR, TQR, and AODV algorithms gradually increases the average energy consumption of nodes. However, the FUCEM has higher remaining energy as compared with the MLR algorithm. The link stability (λ_S) and reliability (λ_R) factors discover the lower mobility and higher energy nodes; thus, the proposed FUCEM has lower energy consumption as compared with MLR.
At the node speed 10 m/s, the remaining energy of the FUCEM is similar to MLR and TQR. When the node speed is 20 m/s, FUCEM, MLR, TQR, and AODV have the higher remaining energy as 983, 967, 974, and 963 (J) respectively. At the speed, 30 m/s, the FUCEM, MLR models have the remaining energy of the nodes as 974, 955 (J) respectively. Figure 5a depicts that the MLR, TQR, and AODV methods consume more energy as compared with the FUCEM. It is due to the highly cooperative nodes (H) are selected for the routing using Markov process. When the speed increases to 40 m/s, the remaining energies for the FUCEM and MLR are 967 and 947 (J) respectively. The FUCEM model avoids the higher-speed mobile nodes for the routing. Thus, it offers reduced energy consumption than other algorithms. At the end of the simulation, the FUCEM model has a higher residual energy 962 (J) as compared to the TQR in the highly dynamic mobile network. The FUCEM improves the residual energy up to 14–19 J at varying node speeds. Hence, the FUCEM model reserves higher residual energy for the MANETs. Thus, the Markov-ARIMA based FUCEM increases the nodes remaining energy by determining the highly cooperative (H) and moderate speed nodes for routing. Also, ACF and PACF analysis provide a confidence level of 95%.
Figure 5b illustrates the performance results of PDR over changing node speeds for FUCEM, MLR, TQR, and AODV. The PDR of the proposed FUCEM compares with the PDR of FUCEM, MLR, TQR, and AODV algorithm with a fixed number of nodes and varying mobility speeds. The PDR must be higher for efficient routing. At the node speed 20 m/s, FUCEM and MLR have a slight deviation in the PDR as 98 and 95%. When the node speed increases to 40 m/s FUCEM and TQR produces the PDR as 96 and 57% respectively. Since the TQR and AODV methods have very lower PDR from its initial. The FUCEM has increased PDR than MLR, as the nodes increases; the FUCEM selects the nodes for routing based on link stability (λ_S) values. Thus, it produces higher PDR, but the MLR, TQR, and AODV algorithm fails in this scenario. The MLR produces lower PDR because it needs to re-compute the route-cache as the node mobility changes with time. At the speed 50 m/s, the FUCEM model stretches its PDR to 10-13% than the MLR; such that the FUCEM adopts the Markov process to discover highly cooperative nodes for routing.
The routing overhead includes the calculation of reliability and link stability for the FUCEM. Figure 5c shows the RO of FUCEM, MLR, TQR, and AODV. Mostly, the FUCEM has reduced RO as compared with MLR and TQR for different node speeds. At the node speed 20 m/s, the FUCEM, TQR, and AODV have similar RO. When the node speed increases to 40 m/s, the MLR, TQR degrades the network performance by producing higher RO as 7.2, and 3.5% respectively; whereas FUCEM produces 2.9% only. At the node speed 50 m/s, the FUCEM produces 43.9% of RO and very low as compared with MLR, TQR, and AODV’s RO of 7.9, 5.3, and 5.2 respectively %. In dynamic mobile networks, the proposed FUCEM reduces the RO up to 3-4%. Due to frequent link breakages, the MLR has to retransmit the packets; thus, MLR has higher RO whereas the FUCEM selects lower mobility nodes for the routing using the \( \lambda \_S \) computation. Also, the ACF and PACF analysis give the confidence level of 95% for the dataset. Thus, link stability and reliability minimize the link breakages and avoids the unwanted flooding of packets in the network.
Figure 5(d) depicts the average end-to-end delay for transmission of packets. Initially, the delay is higher for FUCEM than MLR, TQR, and AODV; because FUCEM needs to compute the λ_R and λ_S values using Markov-ARIMA process. At the speed 10 m/s, FUCEM has 2.0 s of transmission delay, but MLR, TQR, and AODV have 1.7, 1.2, and 1.2 s of delay only. Afterwards, the delay tends to decrease for the FUCEM than MLR and AODV. When the node speed increases to 35 m/s then, TQR outperforms other algorithms by fewer seconds of reduced delay. At the node speed 50 m/s, the transmission delay is 3.3, 5.8, 2.1, and 6.2 s for FUCEM, TQR, and AODV respectively. The reduced delay for the FUCEM in the packet transmission is due to the reduced flooding of control packets. The \( \lambda \_S \) calculation plays a major role to avoid the higher mobile nodes for routing and thus reduces retransmission. The proposed work attains this improvement by the stable and low-speed nodes using Markov-ARIMA process and FUCEM conditions.
4.3.2 Performance metrics versus varying number of node
In this scenario, the random speed is up to 50 m/s for the nodes. Figure 6 illustrates the performance results of the FUCEM and AFTRA models over varying the number of nodes at 10, 20, 30, 40, 50 for different metrics. In this case, the proposed work assigns the RWP mobility to the nodes by using the BonnMotion mobility model. Figure 6a illustrates the impact of the number of nodes over average residual energy. It shows that the residual energy regularly decreases when the number of nodes increases for both models. Typically, faraway nodes consume high energy to transmit the data packets than the nearby neighbour node. When the number of nodes is 10, then the remaining energy for FUCEM, AFTRA, CMMBCR, and AODV algorithms are 996, 975, 973, and 968 (J) respectively. Initially, a few numbers of node require more energy to discover the destination node in the network. Afterwards, the graph for the FUCEM seems linear to the number of nodes. Increasing the number of nodes to 30 produces 20–25 (J) reduced energy consumption for the FUCEM model than the AFTRA, CMMBCR, and AODV model’s energy consumption. Besides CMMBCR and AODV, the AFTRA consumes very higher energy.
The Markov transition states discover the lower mobile and higher energy nodes for routing in the FUCEM. Thus, it has higher energy. The decrease in energy consumption for both models is due to the higher number of nodes available for routing. Figure 6(a) depicts that the CMMBCR and AODV model has marginally lower remaining energy than the proposed FUCEM model. When the number node increases to 50, the AFTRA, CMMBCR, and AODV models have remaining energy of 889, 955, and 952 (J) respectively; whereas the FUCEM model has higher remaining energy than other compared model that is 964 (J). It clearly shows that the FUCEM gradually increases the stability of the node-links using \( \lambda \_S \) calculation. The \( \lambda \_S \) computation facilitates the lower mobile nodes for routing than AFTRA.
Figure 6b illustrates the behaviours PDR over the increasing number of nodes. Typically, as the number of nodes increases then the corresponding PDR decreases slightly for both algorithms. The PDR of the FUCEM seems like the straight line compared to AFTRA, TDSR, and DSR; it indicates that the FUCEM algorithm produces much higher PDR than the AFTRA, TDSR, and DSR. When the number nodes increase to 20, then the FUCEM has 96% of PDR; because it reduces frequent link breakages and energy-draining problems by selecting lower mobility and higher energy nodes for routing using Markov-ARIMA process. When the number of nodes increases to 40 then the PDR for FUCEM is 93%, whereas the AFTRA, TDSR, and DSR protocol were produced 65, 54, and 48% of PDR only. The FUCEM gives the PDR improvement up to 18–28% over other compared protocol. The PDR has the performance gain of 31–40% for the FUCEM compared AFTRA algorithm when the number of nodes is 50. When the number of node increases then there is a higher number of nodes available for routing. Hence, the FUCEM selects the nodes based on λ_R and λ_S; thus, it eventually increases the PDR of routing.
Moreover, based on node transition states the FUCEM selects highly cooperative nodes for routing. Besides, the AFTRA frequently discover the nodes for routing thus it reduces the PDR. Figure 6c illustrates the RO over increasing nodes. There is an eventual reduction of RO as 2.2% for the FUCEM when the number of nodes is 30, but the AFTRA, TDSR, and DSR produces higher RO of 2.3, 2.7, and 6.9% respectively. The RO is increased in the network whenever an error (link breakages/ retransmission) occurs in the transmission and reception of data or control packets while routing. The routing error increases the overhead of the MAC layer. FUCEM has the RO of 2.9% when the number of the node is 50. At the same time, the AFTRA, TDSR, and DSR algorithms have 3.9, 3.2, and 9.9% of respective RO. The FUCEM does not have frequent retransmissions, because discovered nodes have lower mobility for routing thus it reduces the RO; therefore, the proposed FUCEM has 4.3–5.3% of reduced RO.
Figure 6d depicts the delay variance over the increasing number of nodes. The AFTRA algorithm has a higher delay of 1.3, 8.5, and 9.4 s when the number of nodes is 20, whereas the FUCEM has the average end-to-end delay of 1.2 s only. The frequent route discovery process due to the mobility of nodes causes the delayed packet delivery to the destination for the AFTRA algorithm. The delay is much lower in comparison with AFTRA algorithm when the number of nodes is 50 for the FUCEM. That is the FUCEM has the smaller delay variance of 2.2 s for packet delivery to the destination. Besides, the AFTRA, TDSR, and DSR produced 3.1, 9.5, and 10 s of delay respectively. The delay difference between the FUCEM and other algorithms is 2–3.9%. Thus, it produces the faster transmission of packets as well. The transition states of nodes using semi-Markov process predict the higher-cooperative nodes; it tends to increases the link stability and reduces the delay of packet transmission. Also, ACF and PACF analysis produce 95% of confidence level. Overall, the FUCEM has better performance with different scenarios.
The Fig. 7 displays the detection of non-cooperative nodes and Fig. 8 presents the time consumption for detection over the number of nodes for FUCEM and FTP-DSR [8] protocols. It clearly illustrates that the FUCEM performs more effectively than the FTP-DSR. In Fig. 7, whenever node density increases then the detection of non-cooperative nodes has gradually improved for FUCEM than FTP-DSR. At 30 number of nodes, the detection ratio improves to 12–14% for FUCEM over FTP-DSR. Similarly, the time taken for path discovery (cooperative node) for the routing is higher for FTP-DSR over FUCEM as depicted in Fig. 8. The FUCEM takes lesser time to find the cooperative path compared to FTP-DSR because it adopts the Markov-ARIMA process. It offers stable and reliable nodes to attain efficient routing. For example, when the number of nodes is 50, then the FUCEM and FTP-DSR consume 38 and 48 s to the path discovery. The FUCEM accomplishes faster cooperative node discovery by using node reliability (λ_R) and link stability (λ_S) modules with 95% of the confidence interval. Thus, the FUCEM outperforms with most of the performance metrics than other algorithms [8, 9, 12, 40,41,42].

Non-cooperative node detection

Time for path optimality
Table 8 summarises the comparison of proposed FUCEM performance results with SwarmFTCP, AFTRA, MLR, and few recent routing algorithms. The results of proposed model is boldfaced in Table 8. It depicts the numerical results for the node speed 50 m/s and the number of nodes is 50. In Table 8, the FUCEM model has the highest residual energy as 957–964 J, whereas AFTRA and MLR have very lower energies (i.e.) 888 and 940 J respectively. The routing overhead of the FUCEM has 5–6% reduction than others; besides AFTRA and MLR brings higher routing overhead as 3.9% and 7.9%. The lower mobility nodes reduce the overhead of frequent transmission of control packets in the route discovery process. Thus, the FUCEM has reduced RO than other algorithms. Similarly, the PDR and delay metrics of the FUCEM produce significantly better results than the other algorithms. It is due to the computation of reliability, link stability, ACF and PACF analysis of the nodes, which intends to provide efficient results for all scenarios.
5 Conclusion and future work
In this paper, a novel model presented to establish energy and mobility-based cooperative communication for MANET using Markov-ARIMA model. The performance results of the FUCEM is compared with the AFTRA, MLR, TQR, TDSR, DSR, and FTP-DSR algorithms, whereas the FUCEM produces better results in the dynamic mobile ad hoc network as well as in the higher density network. The FUCEM intends to provide stable and effective cooperative routing for the mobile nodes. The simulation results demonstrate that the FUCEM produces higher node lifetime (6–7%) by lower energy consumption, better PDR (13–21%), and lower delay for the various scenarios. The FUCEM produces 31–40% of enhanced PDR for the different density of nodes and gives the reduced RO of 4.3–5.3% over AFTRA and MLR algorithms. Thus, the proposed FUCEM facilitates the stable routing path by considering both the energy and mobility values of the nodes using the ARIMA and semi-Markov process. Moreover, the FUCEM discovers the cooperative neighbour nodes and produces efficient QoS routing with better performance results. The future enhancements of this work will consider the bandwidth and other influencing factors.
References
Prasannavenkatesan, T., & Menakadevi, T. (2016) Significance of scalability for on-demand routing protocols in MANETs. In IEEE Proceedings conference on emerging devices and smart systems (ICEDSS2016), Namakkal, March 4–5 (pp. 76–82).
Prasannavenkatesan, T., Raja, R., & Ganeshkumar, P. (2014). PDA-misbehaving node detection and prevention for MANETs. In IEEE Proceedings of international conference on communication and signal processing (ICCSP), Melmaruvathur (pp. 1808–1812).
Shivashankar, H., Suresh, N., Golla, V., & Jayanthi, G. (2014). Designing energy routing protocol with power consumption optimization in MANET. IEEE Transactions on Emerging Topics in Computing, 2, 192–197.
Rashid, U., Waqar, O., & Kiani, A. K. (2017). Mobility and energy aware routing algorithm for mobile adhoc networks. In IEEE explore (pp. 1–5).
Samundiswary, P. (2012). Trust-based energy-aware reactive routing protocol for wireless sensor networks. International Journal of Computer Applications,43(21), 37–40.
Pushpalatha, M., Venkataraman, R., & Ramarao, T. (2009). Trust-based energy-aware reliable reactive protocol in mobile ad hoc networks. International Journal of Electrical, Computer, Energetic, Electronic and Communication Engineering,3(8), 1529–1532.
Sengathir, J., & Manoharan, R. (2015). A futuristic trust coefficient-based semi-Markov prediction model for mitigating selfish nodes in MANETs. EURASIP Journal on Wireless Communications and Networking, 158, 1–13.
Jayalakshmi, V., & Razak, T. A. (2016). Trust-based power-aware secure source routing protocol using fuzzy logic for mobile ad hoc network. IAENG International Journal of Computer Science,43(1), 1–10.
Khamayseh, Y., Obiedat, G., & Yassin, M. B. (2011). Mobility and load aware routing protocol for ad hoc networks. Journal of King Saud University-Computer and Information Sciences,23(2), 105–113.
Rango, F. D., & Guerriero, F. (2012). Link-stability and energy-aware routing protocol in distributed wireless networks. IEEE Transactions on Parallel and Distributed Systems,23(4), 713–726.
Manoharan, R., & Sengathir, J. (2016). Erlang coefficient based conditional probabilistic model for reliable data dissemination in MANETs. Journal of King Saud University-Computer and Information Sciences,28(3), 289–302.
Gopal, D. G., & Saravanan, R. (2015). Fuzzy-based energy-aware routing protocol with trustworthiness for MANET. International Journal of Electronics and Information Engineering,3(2), 67–80.
Tan, W. C., Bose, S. K., & Cheng, T. H. (2012). Power and mobility aware routing in wireless ad hoc networks. The Institution of Engineering and Technology,6(11), 1425–1437.
Macone, D., Oddi, G., & Pietrabissa, A. (2012). MQ-routing: Mobility-, GPS- and energy-aware routing protocol in MANETs for disaster relief scenarios. Ad Hoc Networks, 11, 861–878.
Prakash, J., Dutta, P., & Pal, A. (2012). Delay prediction in mobile ad hoc network using artificial neural network. Procedia Technology,4, 201–206.
Yassir, A., Nasir, G. A., & Roy, P. (2013). Mobile ad hoc networks location prediction by using artificial neural networks: Considerations and future directions. International Journal Of Computer Technology and Applications,4(1), 120–125.
Gite, P. (2017). Link stability prediction for mobile Ad hoc network route stability. In IEEE International conference on inventive systems and control (ICISC) (pp. 1–5).
Olalekan, A. S., & Babatunde, H. A. (2018). Link state prediction in mobile ad hoc network using Markov renewal process. International Journal of ICT and Management,7, 26–43.
Palani, U., Suresh, K. C., & Nachiappan, A. (2018). Mobility prediction in mobile ad hoc networks using the eye of coverage approach. Cluster Computing, 22, 14991–14998.
Chaudhari, S. S., & Biradar, R. C. (2014). Resource prediction-based routing using wavelet neural network in mobile ad hoc networks. In International conference on circuits, communication, control, and computing (pp. 273–276).
Senthilkumar, R., & Manikandan, P. (2018). Enhancement of AODV protocol based on energy level in MANETs. International Journal of Pure and Applied Mathematics.,118(7), 425–430.
Manohari, D., Anandha Mala, G. S., & Anand Kumar, K. M. (2017). Fault-tolerant topology control with mobility prediction in MANETs for clinical care data transmission. Biomedical Research; Special Section: Artificial Intelligent Techniques for Bio-Medical Signal Processing. Special Issue: S36–S43.
Lai, C.-C., & Liu, C.-M. (2019). A mobility-aware approach for distributed data update on unstructured mobile P2P networks. Journal of Parallel and Distributed Computing,123, 168–179.
Chung, K.-C., Kuo, W.-H., & Liao, W. (2016). Delay analytical models for opportunistic routing in wireless ad hoc networks. IEEE Transactions on Vehicular Technology,66(6), 5330–5339.
Wu, Y.-T., et al. (2008). Impact of node mobility on link duration in multihop mobile networks. IEEE Transactions on Vehicular Technology,58(5), 2435–2442.
Dixit, P., Pillai, A., & Rishi, R. (2019). A lightweight efficient cluster-based routing model for mobile ad hoc networks (LWECM). International Journal of Information Technology 1–7.
Mitra, R., & Sharma, S. (2018). Proactive data routing using controlled mobility of a mobile sink in wireless sensor networks. Computers & Electrical Engineering,70, 21–36.
Ma, X., Chisiu, S., Kacimi, R., & Dhaou, R. (2017). Opportunistic communications in WSN using UAV. In 2017 14th IEEE Annual consumer communications and networking conference (CCNC). IEEE.
Swidan, A., Abdelghany, H. B., Saifan, R., & Zilic, Z. (2016). Mobility and direction aware ad-hoc on-demand distance vector routing protocol. Procedia Computer Science,94, 49–56.
Theerthagiri, P., & Thangavelu, M. (2019). Futuristic speed prediction using auto-regression and neural networks for mobile ad hoc networks. International Journal of Communication Systems,32(9), e3951.
Sengathir, J., & Manoharan, R. (2015). Exponential reliability coefficient based reputation mechanism for isolating selfish nodes in MANETs, Egypt. Informatics Journal,16(2), 231–241.
Chao, G., & Zhu, Q. (2014). An energy-aware routing protocol for mobile ad hoc networks based on route energy comprehensive index. Wireless Personal Communication,79, 1557–1570.
Theerthagiri, P. (2019). CoFEE: Context-aware futuristic energy estimation model for sensor nodes using the Markov model and autoregression. International Journal of Communication Systems, e4248.
Prasannavenkatesan, T., Rajakumar, P., & Pitchaikkannu, A. (2014). Overview of proactive routing protocols in MANET. In IEEE Proceedings of 4th international conference on communication systems & network technologies (pp. 173–177).
Yoon, J., Liu, M., & Noble, B. (2003). Random waypoint considered harmful. In IEEE INFOCOM 2003. Twenty-second annual joint conference of the IEEE computer and communications societies (IEEE Cat. No. 03CH37428) (Vol. 2). IEEE.
BonnMotion Tool. Retrieved November 17, 2017 from http://sys.cs.uos.de/bonnmotion/.
NS2 simulator. Retrieved April 30, 2017 from http://www.isi.edu/nsnam/ns/.
AWK programming script. Retrieved December 24, 2017 from https://www.gnu.org/software/gawk/manual/gawk.html.
Gopinath, S., & Nagarajan, N. (2015). Energy-based reliable multicast routing protocol for packet forwarding in MANET. Journal of Applied Research and Technology,13, 374–381.
Wang, B., Chen, X., & Chang, W. (2014). A light-weight trust-based QoS routing algorithm for ad hoc networks. Pervasive and Mobile Computing,13, 164–180.
Toh, C.-K. (2001). Maximum battery life routing to support ubiquitous mobile computing in wireless ad hoc networks. IEEE Communications Magazine,39(6), 138–147.
Jensen, C. D., & Connell, P. O. (2006). Trust-based route selection in dynamic source routing. In International conference on trust management. Berlin: Springer.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Theerthagiri, P. FUCEM: futuristic cooperation evaluation model using Markov process for evaluating node reliability and link stability in mobile ad hoc network. Wireless Netw 26, 4173–4188 (2020). https://doi.org/10.1007/s11276-020-02326-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11276-020-02326-y