
Abstract
River flood routing is an important issue in current water resources management. As a popular hydrological flood routing method, Muskingum model has always been the dominant method of flood routing. This paper reviews the development of Muskingum model and the research status of its parameter estimation. The characteristics and relationships of different types of Muskingum models are compared, and it is found that the combination of mathematical techniques and evolutionary algorithms has shown good results in parameter estimation in recent years. In addition, this paper also gives a brief overview of six accuracy evaluation criteria and nine research case data sets commonly used in the literature. It also introduces some challenges of the Muskingum model and new trends in future research, which should interest researchers and engineers.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Flood is one of the most deadly disasters in the world, and it is also the most common and frequent natural disaster for life, property, economy and environment in the world (Wijayarathne and Coulibaly 2020). Therefore, flood routing has become a hot issue in water resources management (Yuan et al. 2016). River flood routing is an important aspect of water resources management and one of most challenging practical problems. Its essence is to predict reservoir discharge for specific inflow processes. Generally speaking, the flood path method can be divided into two main methods, namely “hydraulic routing” and “hydrologic routing”. The former is based on the concept of storage function, while the latter is based on the principle of mass conservation and momentum conservation.
However, the hydraulic routing method is often not so widely used in practice, mainly due to the unavailability of morphological and hydrological inputs required at small spatial scales (Perumal and Price 2013). Many researchers have conducted research in this topic (Price Roland 2009; Reggiani et al. 2016; Swain and Sahoo 2015; Todini 2007; Yadav et al. 2015). Simplification methods developed from the continuity equations and simplified forms of mass and momentum equations provide many important contributions. Many researchers have provided assessments, reviews, comparisons, and field applications (Fenton 2019; Gąsiorowski and Szymkiewicz 2022; Koussis 2009; Perumal et al. 2001; Perumal and Sahoo 2012, 2007; Wei and Song 2022).
McCarthy (1938) proposed a primitive hydrological computation method, the Muskingum model, which is based on the storage-continuity relationship and involves multiple computation parameters, and all hydraulic and geomorphological characteristics of the river reach are concentrated into multiple model parameters (Todini 2007). As a popular hydrological flood routing method, the classical Muskingum model and its development can efficiently deal with many complex problems and are widely used in flood routing problems.
In practical applications, the accuracy of Muskingum model in predicting river flow depends on the definition of model structure and the determination of model parameters. In the past few decades, there are two main methods to improve the accuracy of the Muskingum model: (1) improving the structure of the Muskingum model and (2) developing optimization techniques for parameter estimation (Kang et al. 2017; Niazkar and Afzali 2016). In recent decades, some researchers have focused on changing the structure of the Muskingum model storage equation to improve the accuracy of fitting measured hydrological data. In general, the available models can be divided into the following categories: (1) Linear Muskingum model; (2) Nonlinear Muskingum model; (3) Muskingum model with variable exponent parameter; (4) Lateral flow Muskingum model; (5) Variable exponent parameters and lateral flow Muskingum model and (6) Muskingum model considering the interaction between groundwater and surface water. With the increase of parameters, parameter optimization becomes more and more complex. Therefore, in practical applications, the parameter estimation of Muskingum model is the key to flood routing (Sheng et al. 2014). Up to now, various optimization algorithms have been developed and used to search the optimal solution of Muskingum model optimization problem. At present, the optimization techniques for parameter estimation of Muskingum model can be divided into three categories: mathematical techniques, evolutionary algorithms and hybrid algorithms.
Although the research on Muskingum model has been very rich in recent years, it is still necessary to review and analyze the development of Muskingum model and parameter estimation technology. Analyzing the advantages and disadvantages of various improved models, so as to clearly study the challenges and improvements of the Muskingum model, provides better prediction skills for river flood evolution, and provides sufficient data for fitting observed hydrological data. In addition, this paper attempts to summarize the accuracy evaluation criteria used in most literature and the case data sets studied to evaluate various Muskingum models. Therefore, 80 years after the classic Muskingum model was proposed, a recent review article on this will inspire the future.
The rest of this paper is structured as follows: Section 2 introduces the Muskingum modelling development. Section 3 presents main optimization methods and optimization technology for estimating the parameters of Muskingum models. Section 4 is a brief description of the adopted precision evaluation criteria for evaluating the performance of models and optimization techniques. Section 5 gives some studies case data sets. Finally, the work is concluded in Section 6.
2 Model Development
Many researchers focused on modifying the structure of the storage equation with the objective of improving accuracy in fitting observed hydrograph data. Muskingum models can be classified into six groups as follows:
2.1 Linear Muskingum Model
McCarthy (1938) presented continuity and storage equations for flood routing. The continuity equation is written as:
where I and Q denote upstream and downstream flow rates, respectively; S is the channel storage volume; t is the time; and \(\Delta S/\Delta {\text{t}}\) is the change in storage during a time interval \(\Delta t\). The linear Muskingum model (LMM) is expressed as:
where K denotes a time storage constant for the river reach, and X is the weighting factor given to the inflow and outflow in a river reach.
2.2 Nonlinear Muskingum Models
The LMM has two parameters (K and X). However, it was observed to have a nonlinear relationship between the weighted flow and storage volume. The use of a nonlinear model might be more appropriate (Haddad et al. 2015). A nonlinear Muskingum model with three parameters was suggested by Chow (1959):
Gill (1978) added an exponent parameter m to Eq. (3):
Gavilan and Houck (1985) introduced a generalized NLM1 model with four parameters.
where α, α1 and α2 are flow parameters, and m is an exponent parameter.
Easa (2014b) presented a new nonlinear Muskingum model with four parameters that combined NLM1 and NLM2:
Easa et al. (2014) proposed a general form of storage discharge relationship of the Muskingum model:
Vatankhah (2014b) proposed a nonlinear Muskingum model with five parameters:
Easa et al. (2014) proposed a nonlinear Muskingum model with six parameters based on a model with five parameters. It preserved the physical significance of the original Muskingum model parameters (Easa 2013):
Bozorg-Haddad et al. (2015) proposed a nonlinear Muskingum model with seven parameters by adding two constraint coefficients (C1 and C2) based on NLM6.
Niazkar and Afzali (2017) proposed a new Muskingum model by utilizing eight constant parameters in order to relate reach storage to inflow and outflow values:
Bozorg-Haddad et al. (2019) introduced four Muskingum models with improved, generalized, nonlinear storage equations:
where X1 and X2 are weighting factors reflecting the significance of inflows in tth and (t + 1)th time intervals, respectively.
2.3 Muskingum Models with a Varying Exponent Parameter
Based on the NLM2 model, Easa (2013) proposed an improved Muskingum model with a varying exponent parameter. The exponent parameter, which has no physical meaning, is assumed to vary with the inflow level.
where mt is related to It, mt denotes exponent parameter at time t, and letting the inflow range be divided into L levels, mt is defined as
where \({\mu }_{i}\) denotes inflow dividing value for level I; and \({\mu }_{i}\) is given as
where ri denotes inflow dividing parameters for level i, and Imax denotes the maximum inflow.
Vatankhah (2014a) employed a general functional mt based on NLM-VEP1:
where the angle of the sine function is expressed in radian, and constant coefficients \({\alpha }_{\text{i}}(i=\mathrm{1,2},\dots ,5)\) are obtained by using an optimization procedure.
Easa (2015) proposed a general model formulation nonlinear Muskingum model with a varying exponent parameter:
where \(K({\mu }_{t})\), \(X({\mu }_{t})\), \(\alpha ({\mu }_{t})\), and \(m({\mu }_{t})\) are varying parameters and \({\mu }_{t}\) is a dimensionless inflow variable (0 to 1) for time interval t, given by
where It denotes the inflow for time interval t and Imax denotes the maximum inflow during the routing period.
Easa (2014a) proposed a Muskingum model with an inflow based continuous parameter by assuming a continuous parameter \(m({\mu }_{t})\), which is a function of dimensionless inflow variable \({\mu }_{t}\):
where \(m({\mu }_{t})\) denotes exponent parameter for time interval t, a, b, c denote coefficients to be determined using optimization, and \({\mu }_{t}\) denotes dimensionless inflow variable (0 to 1), expressed by Eq. (22).
2.4 Muskingum Models with Lateral Flow
All the above introduced models ignored the reality that lateral flow existed in the river reach in actual flood events (Kang et al. 2017). O'Donnell (1985) proposed the first Muskingum model with lateral flow and assumed that the lateral flow entering the river reach was directly proportional to the inflow with a proportionality factor β:
The LMM-LF was used for studying flow routing process during river ice thawing-breakup period (Yang et al. 2019).
Karahan et al. (2015) presented a nonlinear Muskingum model with lateral flow by integrating lateral flow assumption with NLM2, and
where m is a positive exponent different from 1.
Kang et al. (2017) proposed a nonlinear Muskingum model with lateral flow by introducing a similar lateral flow assumption into NLM4.
2.5 Muskingum Models with Varying Exponent Parameter and Lateral Flow
Zhang et al. (2017) presented a varying exponent parameter Muskingum model with lateral flow by considering that the exponent parameter mt of NLM-LF1 varied with inflow levels:
Kang et al. (2017) proposed another nonlinear Muskingum model with lateral flow by considering that the exponent parameter mt of NLM-LF2 varied with inflow levels.
2.6 Muskingum Models Considering Interaction of Groundwater and Surface Water
Lu et al. (2021) presented an improved NLM-LF1 by assuming that a stable GW-SW interaction process existed before a flood event:
where e denotes the stable lateral inflow due to the GW-SW interaction.
Considering the nonlinear relationship between lateral inflow and channel inflow, the following equation is given by Lu et al. (2021):
where β denotes a power exponent.
2.7 Comparison and Summary of Each Model
In the development of nonlinear Muskingum model, researchers have continued to improve it by increasing the method of considering parameters, so that it has higher degrees of freedom, better fitting ability, and the development tends to be realistic. But to some extent, it will also increase the complexity of the model.
However, only studying the nonlinear Muskingum model is obviously not in line with reality and lacks practical significance, because there are many factors in the actual flood process. Therefore, scholars began to consider the exponential case on the basis of non-linearity, lateral flow, and the later Muskingum models contained both conditions. These models further optimized the ability to predict flood paths. Not only that, some researchers have also considered the exchange of surface water and groundwater in reality, so the Muskingum model including surface water and groundwater is studied, which renders the development of Muskingum model closer the actual situation. The following appendix shows the advantages and disadvantages of each Muskingum model. It is believed that with the development of science and technology, scholars will constantly improve the Muskingum model according to the reality.
3 Parameter Estimation Methods
From literature, it is known that the estimation of model parameters is the most important work for applying Muskingum models. Thus, many research works carried out over recent decades have focused on estimating the parameters of Muskingum models. Based on surveyed literature, the parameter estimation techniques of the Muskingum models can be divided into three groups as follows:
3.1 Mathematical Techniques
S-LSM method was suggested by Gill (1978) to solve a system of nonlinear equations at each time using a trial-and-error procedure. But, if more than a few time steps are included, the S-LSM method could be very time-consuming (Barati 2011). The LSR technique was adapted to estimate Muskingum flood routing model coefficients for multiple tributaries (Khan 1993). An iterative nonlinear multivariate parameter estimation technique (NONLR) was proposed by Yoon and Padmanabhan (1993), which was an iterative procedure including nonlinear least squares regression and required an initial assumption of parameter values. The tedium of piecewise linearization could be avoided by using NONLR, which directly fitted the nonlinear model to the data using nonlinear least-squares regression (Yoon and Padmanabhan 1993). Das (2007) proposed a chance-constrained optimization-based model, which determined the parameters of the Muskingum model by minimizing the SSD of difference between the observed and routed outflows. However, the developed model by Das (2007) was very complex and required massive computation for parameter estimation of the Muskingum model (Niazkar and Afzali 2015). Barati (2011) recommended Nelder-Mead simplex algorithm (NMS) to find the values of parameters in nonlinear Muskingum model. Although the algorithm was simple for programming and it converged quickly to optimal values, it demanded an initial guess for the parameter estimation (Barati 2011; Niazkar and Afzali 2015). In order to eliminate the limitation of parameter estimation procedures, Barati (2013) developed parameter estimation for nonlinear Muskingum models using Excel Generalized Reduced Gradient (GRG) Solver, which was a deterministic method and needed initial value assumption for parameter estimation. Gasiorowski and Szymkiewicz (2020) used Powell’s algorithm for the identification of parameters influencing the accuracy of the solution of the nonlinear Muskingum Equation. Spiliotis et al. (2021) proposed a fuzzy Muskingum model, which treated the parameters as fuzzy symmetric trigonometric numbers to make the fuzzy parameters closer to nature and increase the security of prediction. These mathematical techniques were easy programmed and were quite efficient for finding an optimal solution very quickly, but they lacked global optimality and achieved global optimal solutions contingent on the specification of suitable initial parameter estimates, which was a nontrivial task (Barati 2011; Bozorg-Haddad et al. 2015).
3.2 Evolutionary Algorithms
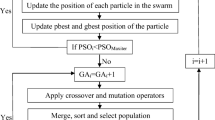
Genetic algorithm (GA) is an evolutionary iterative search engine, which was first used by Mohan (1997) to find optimal parameters of nonlinear Muskingum model. GA could reach better results without requiring initial guesses close to optimal parameter values (Niazkar and Afzali 2015). Wang et al. (2009) proposed a hybrid chaotic genetic algorithm (HCGA) based on chaotic sequence and GA for parameter estimation of Muskingum model. Chu and Chang (2009) applied PSO to the parameter estimation for nonlinear Muskingum model. PSO did not require any initial guess of each parameter and thus avoided the subjective estimation usually found in traditional estimation methods and reduced the likelihood of finding a local optimum of parameter values (Chu and Chang 2009). Although results achieved by PSO were better than those of GA, they were not as good as those by other algorithms such as HS and BFGS (Niazkar and Afzali 2015). Luo and Xie (2010) proposed an immune clonal selection algorithm (ICSA), which did not demand any initial estimate of values to solve parameters of nonlinear Muskingum model. However, a sensitivity analysis was required for the determination of algorithm parameters such as clonal scale, mutation probability, and crossover probability (Barati 2011). Xu et al. (2012) investigated DE for parameter estimation problem of nonlinear Muskingum model, and the application results demonstrated that using DE to estimate parameters could get the best objective values compared with LSM, HJ + DFP, NONLR, GA, HS, BFGS and PSO. Orouji et al. (2013) applied simulated annealing algorithm (SAA) and SFLA to determine parameters in the Muskingum model, and the application results of two benchmarks and real cases showed that SFLA could give the best parameter estimation compared to SAA. Niazkar and Afzali (2015) used a modified honey bee mating optimization algorithm (MHBMOA) with a modified routing procedure for the estimation of Muskingum parameters. Although MHBMOA did not require initial guesses to initiate parameters, it necessitated that they be selected wisely (Niazkar and Afzali 2015). Karahan et al. (2015) used CSA for the calibration of parameters of a modified nonlinear Muskingum model. Yuan et al. (2016) developed an improved BSA to estimate parameters of nonlinear Muskingum model, and results indicated the improved BSA could obtain better performance of solution precision and computational efficiency than PSO, GA and DE. Kang and Zhang (2016) applied elitist-mutated PSO and IGSA to estimate parameters of Muskingum flood routing models. They suggested that the two approaches could be confidently employed to estimate parameters of both linear and nonlinear Muskingum models in engineering applications. Farzin et al. (2018) used IBA to optimize estimated values of three parameters associated with the Muskingum model. Farahani et al. (2019) used Shark Algorithm (SA) to estimate parameters of nonlinear Muskingum with four parameters and results indicated SA outperformed several other evolutionary algorithms. In order to improve the accuracy of outflow prediction, Akbari et al. (2020) proposed a nonlinear Muskingum model with four variable parameters. This model was superior to other nonlinear Muskingum models used by other researchers at that time. Lee (2021) used the meta-heuristic optimization algorithm SAVCA to adjust the parameters of a Muskingum flood evolution model. Norouzi and Bazargan (2021) used particle swarm optimization to optimize the parameters of a linear Muskingum method and data from a single elementary flood, and then applied these parameters to compute outflow hydrographs for four floods, which improved the accuracy of the linear Muskingum method for estimating hydrographs. Bozorg-Haddad et al. (2021) used the Teaching-Based Optimization Algorithm (TLBO) to estimate three parameters of the nonlinear Muskingum model. The combination of TLBO and Muskingum bypassed the need for specific algorithms to optimize parameters, which rendered the Muskingum model flood routing more accurate. Sun et al. (2021) used genetic algorithms to optimize uncertain parameters in Muskingum’s method and compared them with the measured flow. Results showed that the absolute error of about 85% of the observed data was less than 15%, and the runoff and groundwater level changes were well simulated. Norouzi and Bazargan (2022) used particle swarm optimization algorithm to optimize linear Muskingum parameters through the time variation of Y, and proposed a computation method for downstream flood depth with high accuracy. These algorithms did not need initial values of the designed parameters and search randomly for a near-global optimal solution. But these algorithms required careful attention for algorithm parameters, which would affect the execution of the algorithm.
3.3 Hybrid Algorithms
In the last ten years, hybrid global–local optimization algorithms have become popular solution approaches for solving engineering optimization problems (Ayvaz et al. 2009; Kayhan et al. 2010). Easa (2013) used GA and GRG to obtain the global optimal solution for an improved nonlinear Muskingum model with a varying exponent parameter. Karahan et al. (2013) proposed a hybrid HS and BFGS algorithm for improving the Muskingum parameters by coupling a heuristic method for global search and a gradient-based method for local search. Ouyang et al. (2014) combined PSO with NMS to optimize parameters of the Muskingum model. The hybrid PSO-NMS did not require initial values for each parameter, which helped to decrease the computation for global optimum search of parameter values. Hamedi et al. (2015) proposed a hybrid optimization (SFLA-GRG) method for optimal parameter estimation of nonlinear Muskingum. Results demonstrated that SFLA-GRG method was more effective than Excel solver for parameter optimization of nonlinear Muskingum models. Haddad et al. (2015) proposed a novel hybrid SFLA-NMS method for optimal parameter estimation of two new nonlinear Muskingum models in three case studies. Results showed that the hybrid SFLA-NMS method could be successfully applied to optimize parameter values of nonlinear Muskingum models. Niazkar and Afzali (2016, 2017) proposed a new hybrid technique, which combined MHBMO and GRG algorithms for Muskingum parameter estimation. Kang et al. (2017) combined an improved real-coded adaptive GA and NMS algorithm, which was utilized for parameter estimation of two improved nonlinear Muskingum models considering lateral flow. Ehteram et al. (2018) reported a hybrid PSO and BA which could prevent trapping in local optima and increase the convergence speed by substituting a weaker BA solution with the best PSO solution. Bozorg-Haddad et al. (2019) successfully used SFLA-NMS method to estimate optimal parameter values with different generalized nonlinear Muskingum models. Okkan and Kirdemir (2020) mixed PSO with the Levenberg–Marquardt (LM) algorithm to estimate the parameters of a nonlinear Muskingum model with three parameters. Compared with other algorithms, the optimal results were obtained faster. Akbari and Hessami-Kermani (2021) used PSO-GA algorithm to optimize Muskingum parameters with faster convergence speed and higher accuracy. Yuan et al. (2021) proposed a modified PRP algorithm based on line search technique and modified PRP formula, which had better performance in estimating the parameters of nonlinear Muskingum model. These hybrid methods overcame the shortcomings of both mathematical optimization techniques and evolutionary algorithms, and thus appeared to be the most efficient in solving parameter estimation with nonlinear Muskingum models (Bozorg-Haddad et al. 2019; Niazkar and Afzali 2016).
3.4 Method Summary
In the above mathematical methods for optimizing the Muskingum model, from the initial S-LSM method to the recent fuzzy parameter method, it has been constantly closer to the uncertainty of the problem. Among them, the fuzzy estimation method is relatively good, which not only makes the fuzzy parameters closer to nature but also improves the safety of prediction. Moreover, the generated blur band can largely include the output of observation data. Global optimization is the key advantage of such methods, but the premise is that the initial guess of the optimal solution should be close to the global optimum.
With the continuous development of computer technology, researchers continue to explore new optimization algorithms and pertinent modified algorithms to improve the accuracy of the Muskingum model in the process of river flood routing. Among the above evolutionary algorithms, PSO and GA algorithm are the fastest, most accepted and most widely used. However, these algorithms need to pay close attention to the parameters of the algorithm, because they are plagued by the slow convergence of random search computation intensive to the global optimum, which will affect the execution of the algorithm.
Using hybrid algorithms to estimate parameters can continuously combine the advantages and disadvantages of different algorithms to complement each other. Recently, Akbari and Hessami-Kermani (2021) used PSO-GA algorithm to estimate for continuous improvement. At present, the combination of PSO-GA is the best. They have fast convergence speed, high precision and are superior to other hybrid algorithms in the Muskingum model. Among these parameter estimation methods, the third type (hybrid algorithm) seems to be the most effective solution to parameter estimation of the nonlinear Muskingum model.
4 Performance Evaluation Criteria
Parameters of different versions of Muskingum models can be estimated by various techniques. To evaluate the performance of models and optimization techniques, six precision evaluation criteria are generally employed, namely sum of squared deviations (SSD), sum of absolute value of deviations (SAD), absolute value deviations between peaks of observed and routed flows (DPO), absolute value of deviations of peak times of observed and routed flows (DPOT), mean absolute relative error (MARE), and Nash–Sutcliffe criterion (NSC) (Barati 2013; Niazkar and Afzali 2015).
4.1 Outflow Criteria
The accuracy of the outflow can be determined by SSD or SAD (Barati 2011; Mohan 1997; Xu et al. 2012):
where \({\text{O}}_{o}^{t}\) and \({\text{O}}_{r}^{t}\) are observed and routed outflows respectively at time t, and N is the total number of time intervals.
4.2 Peak Magnitude Criterion
DPO is a measure of the accuracy of the peak magnitude of the outflow (Yoon and Padmanabhan 1993):
where \({\text{O}}_{o}^{p}\) and \({\text{O}}_{r}^{p}\) are peak magnitudes of observed and routed outflows, respectively.
4.3 Peak Time Criterion
DPOT is a measure of the accuracy of the peak time of the outflow (Yoon and Padmanabhan 1993):
where \({T}_{o}^{p}\) and \({T}_{r}^{p}\) are peak times of observed and routed outflows, respectively.
4.4 Mean Absolute Relative Criterion
MARE is a measure of error between observed and routed outflows (Toprak 2009):
4.5 Nash–Sutcliffe Criterion
NSC is recommended by the ASCE Task Committee on Definition of Criteria for Evaluation of Watershed models (McCuen et al. 2006; Perumal and Sahoo 2007):
5 Studied Case Data Set
Based on the literature review, several case studies were often considered to test the performance of all the above different versions of Muskingum models and various parameter estimation techniques. Common cases of nonlinear river flood routing model were considered to reflect the linear and nonlinear characteristics of flood routing in different regions. The Wilson dataset was a smooth unimodal process whilst the flood of Wye River in December 1960 was a non-smooth unimodal process. The Viessman and Lewis datasets and the October 1982 flood of the Wye River were multi-peak hydrological processes, and the 1961 flood of the South Canal was a hydrological process that included heavy rainfall. These were representative test sets.
5.1 Case 1: Data set by Wilson
Wilson (1974) reported the inflow and outflow hydrographs, which were smooth single-peak hydrographs, as shown in Fig. 1. The data set has been demonstrated to exhibit an obvious nonlinear relationship between the storage and weighted-flow (Mohan 1997; Yoon and Padmanabhan 1993). These data were widely used for verifying different structures of the storage equation of Muskingum models and the effectiveness of various parameters estimation techniques during the optimization stage.

Inflow and outflow hydrographs by Wilson
5.2 Case 2: River Wyre December 1960 Flood
The second case data set were about a 1960 flood in the Wye River in the United Kingdom, which stretched 69.75 km from Erwood to Belmont and had no tributaries and very small lateral inflow (Natural Environment Research Council 1975). The inflow and outflow hydrographs were non-smooth single-peak hydrographs, as shown in Fig. 2. This case data set was first studied by O'Donnell et al. (1988) with a linear Muskingum model. This flood case was considered a good test case to test flood routing methods (Bajracharya and Barry 1997).

Inflow and outflow hydrographs of River Wyre December 1960 flood
5.3 Case 3: Data set by Viessman and Lewis
The third case data set were introduced by Viessman and Lewis (2003). The inflow and outflow hydrographs were multiple -peak hydrographs, as shown in Fig. 3.

Inflow and outflow hydrographs by Viessman and Lewis
5.4 Case 4: River Wyre October 1982 Flood
The fourth flood event was a 1982 flood in the Wye River in the United Kingdom, which was first employed by O'Donnell (1985) for a direct three parameter Muskingum procedure incorporating lateral inflow, as shown in Fig. 4. This flood event not only exhibited a considerable increase in the flood volume between the inflow and outflow sections (lateral flow about 25 km apart), but also had a multi-peaked inflow (O'Donnell 1985; Zhang et al. 2017).

Inflow and outflow hydrographs of River Wyre October 1982 flood
5.5 Case 5: Nanyun River 1961 Flood
The fifth flood event was about a 1961 flood in the Nanyun River in China, which stretched 83.8 km from Chenggouwan to Linqing and had no tributaries in the middle. When there was heavy rainfall, there were waterlogging and water discharge, but had little impact on the flood, as shown in Fig. 5. The data set were employed with a linear Muskingum model by Wang et al. (2009).

Inflow and outflow hydrographs of Nanyun River 1961 flood
6 Conclusions and Future Directions
Channel flood evolution is an important aspect of water resources management. Muskingum model is one of the most widely used channel flood evolution methods. This paper reviews the research status and progress of six types of model structures, three groups of optimization techniques, six commonly used performance evaluation criteria and five reference case data sets. According to the study on different model structures, the more were the parameters, the better was the performance of flood routing model in fitting historical records. However, the optimization process becomes more complex, and the model prediction ability deteriorates. In addition, the combination of mathematical techniques and evolutionary algorithms shows high efficiency in parameter estimation. Based on this, we present our views on future directions, research questions, and hotspots related to the Muskingum model on river flood routing.
-
1.
Some special and general Muskingum models have been developed for river flood routing. The models have different numbers of parameters, and a research question is which model can simulate routing flood more accurately for applications to different hydrograph types in practice. Field and laboratory experiments should be made in future to better understand characteristics of Muskingum models for routing flood events.
-
2.
It was acknowledged that an increasing number of parameters in model calibration also increased the data dependency of the model and worsened the prediction ability of the model (Karahan 2014). Although some researches have done a lot of effective work for the optimal parameter estimation of Muskingum Models, calibration of their parameters was still considered to be challenging. The recent advancement in optimization technologies has provided a feasible way for practical optimization problems (Wang et al. 2020). Thus, the application of more efficient algorithms that can determine optimal solution is recommended for future studies.
-
3.
The variations of environmental conditions can change characteristics of catchments such as catchment shape, river morphology, and vegetation, which have important effects on the channel storage. The values of parameters of Muskingum model for a given river should be updated after any significant variations in environmental conditions. Hence, sensitivity analysis should be undertaken to investigate the influence of correlated parameters in Muskingum models on model outputs in order to adapt to impacts of environmental changes.
Data Availability
All authors made sure that all data and materials support our published claims and comply with field standards.
Abbreviations
- LMM:
-
Linear Muskingum model
- NLM:
-
Nonlinear Muskingum model
- NLM-VEP:
-
Nonlinear Muskingum model with variable exponent parameter
- LMM-LF:
-
Linear Muskingum model with lateral flow
- NLM-LF:
-
Nonlinear Muskingum model with lateral flow
- NLM-VEP-LF:
-
Nonlinear Muskingum model with variable exponent parameter and lateral flow
- NLM-LF-GS:
-
Nonlinear Muskingum model with variable exponential parameters and transverse flow in the presence of stable GW-SW interaction process
- NLM-GS:
-
Nonlinear Muskingum model considering the nonlinear relationship between lateral and channel inflow
- HJ:
-
Hooke Jeeves pattern search
- LR:
-
Linear Regression
- CG:
-
Conjugate Gradient method
- DFP:
-
Davidon-Fletcher-Powell
- HJ + DFP:
-
HJ pattern search in conjunction with Davidon-Fletcher-Powell
- NONLR:
-
Nonlinear Multivariate Parameter estimation technique
- GA:
-
Genetic Algorithm
- HS:
-
Harmony Search Algorithm
- PSO:
-
Particle Swarm Optimization Algorithm
- ICSA:
-
Immune Clonal Selection Algorithm
- DE:
-
Differential Evolution Algorithm
- SFLA:
-
Shuffled Frog Leaping Algorithm
- MHBMOA:
-
Modified Honey Bee Mating Optimization Algorithm
- CSA:
-
Cuckoo Search Algorithm
- IGSA:
-
Improved Gravitational Search Algorithm
- NMS:
-
Nelder-Mead simplex Algorithm
- GRG:
-
Generalized Reduced Gradient Algorithm
- BFGS:
-
Broyden–Fletcher–Goldfarb–Shanno
- GA-NMS:
-
Hybrid GA and Nelder-Mead simplex Algorithm
- GA-GRG:
-
Hybrid GA and GRG
- HS-BFGS:
-
Hybrid HS and BFGS
- SFLA-GRG:
-
Hybrid SFLA and GRG
- BA:
-
Bat Algorithm
- GGA:
-
Gray-encoded Genetic Algorithm
- BGA:
-
Binary-encoded Genetic Algorithm
- HCGA:
-
Hybrid Chaotic Genetic Algorithm
- SAA:
-
Simulated Annealing Algorithm
- SAVCA:
-
Self-Adaptive Vision Correction Algorithm
- CSS :
-
Charged System Search
- LM:
-
Leven Berg-Marquardt Algorithm
- PRP:
-
Polak–Ribière–Polyak method
- SA :
-
Shark Algorithm
- SSD:
-
Sum of squared deviations
- SAD:
-
Sum of absolute value of deviations,
- DPO:
-
Absolute value deviations between peaks of observed and routed flows
- DPOT:
-
Absolute value of deviations of peak times of observed and routed flows
- MARE:
-
Mean absolute relative error
- NSC:
-
Nash-Sutcliffe criterion
References
Akbari R, Hessami-Kermani M-R (2021) A new method for dividing flood period in the variable-parameter Muskingum models. Hydrol Res 53:241–257. https://doi.org/10.2166/nh.2021.192
Akbari R, Hessami-Kermani M-R, Shojaee S (2020) Flood routing: improving outflow using a new non-linear Muskingum model with four variable parameters coupled with PSO-GA algorithm. Water Resour Manage 34:3291–3316. https://doi.org/10.1007/s11269-020-02613-5
Ayvaz MT, Kayhan AH, Ceylan H, Gurarslan G (2009) Hybridizing the harmony search algorithm with a spreadsheet ‘Solver’ for solving continuous engineering optimization problems. Eng Optim 41:1119–1144. https://doi.org/10.1080/03052150902926835
Bajracharya K, Barry DA (1997) Accuracy criteria for linearised diffusion wave flood routing. J Hydrol 195:200–217. https://doi.org/10.1016/S0022-1694(96)03235-0
Barati R (2011) Parameter estimation of nonlinear Muskingum models using Nelder-mead simplex algorithm. J Hydrol Eng 16:946–954. https://doi.org/10.1061/(asce)he.1943-5584.0000379
Barati R (2013) Application of excel solver for parameter estimation of the nonlinear Muskingum models. KSCE J Civ Eng 17:1139–1148. https://doi.org/10.1007/s12205-013-0037-2
Bozorg-Haddad O, Hamedi F, Orouji H, Pazoki M, Loaiciga HA (2015) A re-parameterized and improved nonlinear Muskingum model for flood routing. Water Resour Manage 29:3419–3440. https://doi.org/10.1007/s11269-015-1008-9
Bozorg-Haddad O, Abdi-Dehkordi M, Hamedi F, Pazoki M, Loaiciga HA (2019) Generalized storage equations for flood routing with nonlinear Muskingum models. Water Resour Manage 33:2677–2691. https://doi.org/10.1007/s11269-019-02247-2
Bozorg-Haddad O, Sarzaeim P, Loáiciga HA (2021) Developing a novel parameter-free optimization framework for flood routing. Sci Rep 11:16183. https://doi.org/10.1038/s41598-021-95721-0
Chow VT (1959) Open channel hydraulics. McGraw-Hill, New York
Chu HJ, Chang LC (2009) Applying particle swarm optimization to parameter estimation of the nonlinear Muskingum model. J Hydrol Eng 14:1024–1027. https://doi.org/10.1061/(ASCE)HE.1943-5584.0000070
Das A (2007) Chance-constrained optimization-based parameter estimation for Muskingum models. J Irrig Drain Eng 133:487–494. https://doi.org/10.1061/(ASCE)0733-9437(2007)133:5(487)
Easa SM (2013) Improved nonlinear muskingum model with variable exponent parameter. J Hydrol Eng 18:1790–1794. https://doi.org/10.1061/(asce)he.1943-5584.0000702
Easa SM (2014a) Closure to “Improved Nonlinear Muskingum Model with Variable Exponent Parameter” by Said M. Easa. J Hydrol Eng 19. https://doi.org/10.1061/(asce)he.1943-5584.0001041
Easa SM (2014b) New and improved four-parameter non-linear Muskingum model. Proc Inst Civ Eng Water Manage 167:288–298. https://doi.org/10.1680/wama.12.00113
Easa SM (2015) Versatile Muskingum flood model with four variable parameters. Proc Inst Civ Eng Water Manage 168:139–148. https://doi.org/10.1680/wama.14.00034
Easa SM, Barati R, Shahheydari H, Nodoshan EJ, Barati T (2014) Discussion: New and improved four-parameter non-linear Muskingum model. Proc Inst Civ Eng Water Manage 167:612–615. https://doi.org/10.1680/wama.14.00030
Ehteram M et al (2018) Improving the Muskingum flood routing method using a hybrid of particle swarm optimization and bat algorithm. Water 10:807. https://doi.org/10.3390/w10060807
Farahani N, Karami H, Farzin S, Ehteram M, Kisi O, El Shafie A (2019) A new method for flood routing utilizing four-parameter nonlinear Muskingum and shark algorithm. Water Resour Manage 33:4879–4893. https://doi.org/10.1007/s11269-019-02409-2
Farzin S et al (2018) Flood routing in river reaches using a three-parameter Muskingum model coupled with an improved bat algorithm. Water 10:1130. https://doi.org/10.3390/w10091130
Fenton JD (2019) Flood routing methods. J Hydrol 570:251–264. https://doi.org/10.1016/j.jhydrol.2019.01.006
Gasiorowski D, Szymkiewicz R (2020) Identification of parameters influencing the accuracy of the solution of the nonlinear Muskingum equation. Water Resour Manage 34:3147–3164. https://doi.org/10.1007/s11269-020-02599-0
Gąsiorowski D, Szymkiewicz R (2022) Inverse flood routing using simplified flow equations. Water Resour Manage 36:4115–4135. https://doi.org/10.1007/s11269-022-03244-8
Gavilan G, Houck MH (1985) Optimal Muskingum river routing. Paper presented at the Proceedings of ASCE WRPMD Specialty Conference on Computer Applications in Water Resouces, New York
Gill MA (1978) Flood routing by the Muskingum method. J Hydrol 36:353–363. https://doi.org/10.1016/0022-1694(78)90153-1
Haddad OB, Hamedi F, Fallah-Mehdipour E, Orouji H, Mariño MA (2015) Application of a hybrid optimization method in Muskingum parameter estimation. J Irrig Drain Eng 141:04015026. https://doi.org/10.1061/(ASCE)IR.1943-4774.0000929
Hamedi F, Bozorg-Haddad O, Orouji H (2015) Discussion of “Application of excel solver for parameter estimation of the nonlinear Muskingum models” by Reza Barati. KSCE J Civ Eng 19:340–342. https://doi.org/10.1007/s12205-014-0566-3
Kang L, Zhang S (2016) Application of the elitist-mutated PSO and an improved GSA to estimate parameters of linear and nonlinear Muskingum flood routing models. Plos One 11:e0147338. https://doi.org/10.1371/journal.pone.0147338
Kang L, Zhou L, Zhang S (2017) Parameter estimation of two improved nonlinear Muskingum models considering the lateral flow using a hybrid algorithm. Water Resour Manage 31:4449–4467. https://doi.org/10.1007/s11269-017-1758-7
Karahan H (2014) Discussion of “Improved Nonlinear Muskingum Model with Variable Exponent Parameter” by Said M. Easa. J Hydrol Eng 19. https://doi.org/10.1061/(asce)he.1943-5584.0001045
Karahan H, Gurarslan G, Geem ZW (2013) Parameter estimation of the nonlinear Muskingum flood-routing model using a hybrid harmony search algorithm. J Hydrol Eng 18:352–360. https://doi.org/10.1061/(asce)he.1943-5584.0000608
Karahan H, Gurarslan G, Geem ZW (2015) A new nonlinear Muskingum flood routing model incorporating lateral flow. Eng Optimiz 47:737–749. https://doi.org/10.1080/0305215X.2014.918115
Kayhan AH, Ceylan H, Ayvaz MT, Gurarslan G (2010) PSOLVER: A new hybrid particle swarm optimization algorithm for solving continuous optimization problems. Expert Syst Appl 37:6798–6808. https://doi.org/10.1016/j.eswa.2010.03.046
Khan MH (1993) Muskingum flood routing model for multiple tributaries. Water Resour Res 29:1057–1062. https://doi.org/10.1029/92WR02850
Koussis AD (2009) Assessment and review of the hydraulics of storage flood routing 70 years after the presentation of the Muskingum method. Hydrol Sci J 54:43–61. https://doi.org/10.1623/hysj.54.1.43
Lee EH (2021) Development of a New 8-Parameter Muskingum flood routing model with modified inflows. Water 13:3170
Lu C et al (2021) Estimation of the interaction between groundwater and surface water based on flow routing using an improved nonlinear Muskingum-Cunge method. Water Resour Manage 35:2649–2666. https://doi.org/10.1007/s11269-021-02857-9
Luo J, Xie J (2010) Parameter estimation for nonlinear Muskingum model based on immune clonal selection algorithm. J Hydrol Eng 15:844–851. https://doi.org/10.1061/(asce)he.1943-5584.0000244
McCarthy GT (1938) The unit hydrograph and flood routing. proceedings of Conference of North Atlantic Division. US Army Corps Eng 1938:608–609
McCuen RH, Knight Z, Cutter AG (2006) Evaluation of the Nash-Sutcliffe efficiency index. J Hydrol Eng 11:597–602. https://doi.org/10.1061/(ASCE)1084-0699(2006)11:6(597)
Mohan S (1997) Parameter estimation of nonlinear Muskingum models using genetic algorithm. J Hydraul Eng 123:137–142. https://doi.org/10.1061/(ASCE)0733-9429(1997)123:2(137)
Natural Environment Research Council N (1975) Flood Studies Report, vol III. Institute of Hydrology, Wallingford
Niazkar M, Afzali SH (2016) Application of new hybrid optimization technique for parameter estimation of new improved version of Muskingum model. Water Resour Manage 30:4713–4730. https://doi.org/10.1007/s11269-016-1449-9
Niazkar M, Afzali SH (2017) Parameter estimation of an improved nonlinear Muskingum model using a new hybrid method. Hydrol Res 48:1253–1267. https://doi.org/10.2166/nh.2016.089
Niazkar M, Afzali SH (2015) Assessment of modified honey bee mating optimization for parameter estimation of nonlinear Muskingum models. J Hydrol Eng 20. https://doi.org/10.1061/(asce)he.1943-5584.0001028
Norouzi H, Bazargan J (2021) Effects of uncertainty in determining the parameters of the linear Muskingum method using the particle swarm optimization (PSO) algorithm. J Water Clim Chang 12:2055–2067. https://doi.org/10.2166/wcc.2021.227
Norouzi H, Bazargan J (2022) Calculation of water depth during flood in rivers using linear Muskingum method and Particle Swarm Optimization (PSO) algorithm. Water Resour Manage 36:4343–4361. https://doi.org/10.1007/s11269-022-03257-3
O’Donnell T (1985) A direct three-parameter Muskingum procedure incorporating lateral inflow. Hydrol Sci J 30:479–496. https://doi.org/10.1080/02626668509491013
O’Donnell T, Pearson CP, Woods RA (1988) Improved fitting for three-parameter Muskingum procedure. J Hydraul Eng 114:516–528. https://doi.org/10.1061/(ASCE)0733-9429(1988)114:5(516)
Okkan U, Kirdemir U (2020) Locally tuned hybridized particle swarm optimization for the calibration of the nonlinear Muskingum flood routing model. J Water Clim Chang 11:343–358. https://doi.org/10.2166/wcc.2020.015
Orouji H, Haddad OB, Fallah-Mehdipour E, Mariño MA (2013) Estimation of Muskingum parameter by meta-heuristic algorithms. Proc Inst Civ Eng Water Manage 166:315–324. https://doi.org/10.1680/wama.11.00068
Ouyang A, Li K, Tung Khac T, Sallam A, Sha EHM (2014) Hybrid particle swarm optimization for parameter estimation of Muskingum model. Neural Comput Appl 25:1785–1799. https://doi.org/10.1007/s00521-014-1669-y
Perumal M, Price RK (2013) A fully mass conservative variable parameter McCarthy–Muskingum method: Theory and verification. J Hydrol 502:89–102. https://doi.org/10.1016/j.jhydrol.2013.08.023
Perumal M, Sahoo B (2012) Comparison of variable parameter Muskingum-Cunge and variable parameter McCarthy-Muskingum routing methods. World Environ Water Resour Congr 2012:1270–1279. https://doi.org/10.1061/9780784412312.128
Perumal M, Connell EO, Raju Kittur GR (2001) Field applications of a variable-parameter Muskingum method. J Hydrol Eng 6:196–207. https://doi.org/10.1061/(ASCE)1084-0699(2001)6:3(196)
Perumal M, Sahoo B (2007) Applicability criteria of the variable parameter Muskingum stage and discharge routing methods. Water Resour Res 43. https://doi.org/10.1029/2006WR004909
Price Roland K (2009) Volume-conservative nonlinear flood routing. J Hydraul Eng 135:838–845. https://doi.org/10.1061/(ASCE)HY.1943-7900.0000088
Reggiani P, Todini E, Meissner D (2016) On mass and momentum conservation in the variable-parameter Muskingum method. J Hydrol 543:562–576. https://doi.org/10.1016/j.jhydrol.2016.10.030
Sheng Z, Ouyang A, Liu L-B, Yuan G (2014) A Novel parameter estimation method for muskingum model using new newton-type trust region algorithm. Math Probl Eng 2014:634852. https://doi.org/10.1155/2014/634852
Spiliotis M, Sordo-Ward A, Garrote L (2021) Estimation of fuzzy parameters in the linear Muskingum model with the aid of particle swarm optimization. Sustainability 13:7152
Sun K, Hu L, Guo J, Yang Z, Zhai Y, Zhang S (2021) Enhancing the understanding of hydrological responses induced by ecological water replenishment using improved machine learning models: A case study in Yongding River. Sci Total Environ 768:145489. https://doi.org/10.1016/j.scitotenv.2021.145489
Swain R, Sahoo B (2015) Variable parameter McCarthy–Muskingum flow transport model for compound channels accounting for distributed non-uniform lateral flow. J Hydrol 530:698–715. https://doi.org/10.1016/j.jhydrol.2015.10.030
Todini E (2007) A mass conservative and water storage consistent variable parameter Muskingum-Cunge approach. Hydrol Earth Syst Sci 11:1645–1659. https://doi.org/10.5194/hess-11-1645-2007
Toprak ZF (2009) Flow discharge modeling in open canals using a New Fuzzy Modeling Technique (SMRGT). CLEAN Soil Air Water 37:742–752. https://doi.org/10.1002/clen.200900146
Vatankhah AR (2014a) Discussion of “Improved Nonlinear Muskingum Model with Variable Exponent Parameter” by Said M. Easa. J Hydrol Eng 19. https://doi.org/10.1061/(asce)he.1943-5584.0001044
Vatankhah AR (2014b) Discussion of “Parameter Estimation of the Nonlinear Muskingum Flood-Routing Model Using a Hybrid Harmony Search Algorithm” by Halil Karahan, Gurhan Gurarslan, and Zong Woo Geem. J Hydrol Eng 19:839–842. https://doi.org/10.1061/(asce)he.1943-5584.0000845
Viessman W, Lewis GL (2003) Introduction to hydrology. Pearson Education Inc, Upper Sadle River
Wang W-C, Xu L, Chau K-W, Xu D-M (2020) Yin-Yang firefly algorithm based on dimensionally Cauchy mutation. Expert Syst Appl 150:113216. https://doi.org/10.1016/j.eswa.2020.113216
Wang W, Xu Z, Qiu L, Xu D (2009) Hybrid chaotic genetic algorithms for optimal parameter estimation of muskingum flood routing model. In: 2009 International Joint Conference on Computational Sciences and Optimization, CSO 2009, April 24, 2009 - April 26, 2009, Sanya, Hainan, China. Proceedings of the 2009 International Joint Conference on Computational Sciences and Optimization, CSO 2009. IEEE Computer Society, pp 215–218. https://doi.org/10.1109/CSO.2009.34
Wei T, Song S (2022) Comparison of frequency calculation methods for precipitation series containing zero values. Water Resour Manage 36:527–550. https://doi.org/10.1007/s11269-021-03038-4
Wijayarathne DB, Coulibaly P (2020) Identification of hydrological models for operational flood forecasting in St. John’s, Newfoundland, Canada. J Hydrol Reg Stud 27:100646. https://doi.org/10.1016/j.ejrh.2019.100646
Wilson EM (1974) Engineering hydrology. MacMillan, London
Xu D-M, Qiu L, Chen S-Y (2012) Estimation of nonlinear Muskingum model parameter using differential evolution. J Hydrol Eng 17:348–353. https://doi.org/10.1061/(asce)he.1943-5584.0000432
Yadav B, Perumal M, Bardossy A (2015) Variable parameter McCarthy–Muskingum routing method considering lateral flow. J Hydrol 523:489–499. https://doi.org/10.1016/j.jhydrol.2015.01.068
Yang W, Wang J, Sui J, Zhang F, Zhang B (2019) A Modified Muskingum flow routing model for flood wave propagation during river ice thawing-breakup period. Water Resour Manage 33:4865–4878. https://doi.org/10.1007/s11269-019-02412-7
Yoon J, Padmanabhan G (1993) Parameter estimation of linear and nonlinear Muskingum models. J Water Resour Plan Manag 119:600–610. https://doi.org/10.1061/(ASCE)0733-9496(1993)119:5(600)
Yuan X, Wu X, Tian H, Yuan Y, Adnan RM (2016) Parameter identification of nonlinear Muskingum model with backtracking search algorithm. Water Resour Manage 30:2767–2783. https://doi.org/10.1007/s11269-016-1321-y
Yuan G, Lu J, Wang Z (2021) The modified PRP conjugate gradient algorithm under a non-descent line search and its application in the Muskingum model and image restoration problems. Soft Comput 25:5867–5879. https://doi.org/10.1007/s00500-021-05580-0
Zhang S, Kang L, Zhou L, Guo X (2017) A new modified nonlinear Muskingum model and its parameter estimation using the adaptive genetic algorithm. Hydrol Res 48:17–27. https://doi.org/10.2166/nh.2016.185
Funding
Special project for collaborative innovation of science and technology in 2021 (No: 202121206), Henan province university scientific and technological innovation team (No: 18IRTSTHN009).
Author information
Authors and Affiliations
Contributions
Wen-chuan Wang: Conceptualization, Methodology, Writing-original draft. Wei-can Tian: Investigation, Writing-original draft preparation. Dong-mei Xu: Formal analysis and data collection. Kwok-wing Chau: Writing and editing-original draft. Qiang Ma: Investigation. Chang-jun Liu: Formal analysis.
Corresponding author
Ethics declarations
Ethics Approval
Not applicable.
Consent to Participate
All authors gave explicit consent to participate in this work.
Consent to Publish
All authors gave explicit consent to publish this manuscript.
Competing of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wang, Wc., Tian, Wc., Xu, Dm. et al. Muskingum Models’ Development and their Parameter Estimation: A State-of-the-art Review. Water Resour Manage 37, 3129–3150 (2023). https://doi.org/10.1007/s11269-023-03493-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-023-03493-1