
Abstract
The present work deals with the propagation of Rayleigh-type surface waves in a swelling porous elastic half-space consisting of three phases, namely solid matrix, liquid (viscous) and gas (inviscid). Using Eringen’s theory of swelling porous media, the governing equations are first solved by potential method. Frequency equation of Rayleigh-type waves has been derived, which is found to be irrational due to the presence of radicals in it. This irrational equation has been rationalized into a polynomial, which is then solved numerically for a specific porous model consisting of sandstone, water (viscous) and carbon dioxide as solid, liquid and gas phases, respectively. The nature of Rayleigh-type surface waves in the considered swelling porous medium is found to be inhomogeneous. Two modes of Rayleigh-type surface waves are noticed: One of them is the counterpart of the classical Rayleigh wave, while the second mode of Rayleigh-type surface waves arises due to the presence of either liquid or gas phases of the swelling porous medium. The variation of phase speeds and the corresponding attenuations of Rayleigh-type surface waves are depicted graphically against frequency parameter for the selected model. In the considered model, the swelling parameter has negligible effect on the propagation speeds of Rayleigh-type surface modes. It is also observed that in the absence of swelling, there still exist two modes of Rayleigh-type waves. The effect of the viscosity of the liquid constituent present in the pores is also examined on the phase speeds and attenuations. The results of Gales (Eur J Mech A Solids, 23:345–357 2004) for the cases of fluid saturation alone and gas saturation alone have also been deduced analytically as special cases from the present formulation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Wave propagation in porous media has been a subject of considerable interest from the viewpoints of acoustics, seismology and geophysics. Biot (1941) was perhaps the first who developed the theory of fluid-saturated porous elastic solid in which the porous solid consists of elastic skeleton saturated with a viscous fluid. He predicted theoretically that two compressional waves (fast and slow) and one transverse wave can propagate in the porous medium (see Biot 1956a, b). The existence of the second compressional wave was later confirmed experimentally by Plona (1980). Biot’s theory is well accepted and still forms a strong base for wave propagation in porous media (see Coussy 2010), but it focuses on porous rocks saturated by a single fluid. In many geophysical settings, the existence of porous medium consisting of more than two phases simultaneously cannot be ruled out. For example, oil fields are the porous media of soil containing multiple fluids, porous rocks may be filled with air/gas and liquid, etc. Keeping in view the existence of multiple phasic porous medium, Brutsaert (1964), Berryman et al. (1988), Santos et al. (1990a, b) and Leclaire et al. (1994) presented porous model for three-phase continuum on the basis of different assumptions. In all these three-phasic porous medium, the existence of three types of compressional waves and one type of shear wave has been shown in the literature.
To study the mechanical behavior of porous medium with multiple fluids, several continuum theories have been proposed by the researchers under different assumptions. One of the theory of porous media developed in the past is by Eringen (1994). Eringen developed a continuum theory of swelling porous elastic soils as a continuum theory of mixture for porous elastic solids filled with viscous fluid and gas. This theory of swelling porous media is different from the theory of porous media developed by Tuncay and Corapcioglu (1997) and Garg and Nayfeh (1986) in the sense of shear response of the porous medium. The shear response provided by the liquid constituent in Eringen’s theory is mainly responsible to give rise the swelling phenomena in the porous media. Soils containing fluids, wet woods, paper, etc. lie in the category of swelling porous media. A detailed discussion about Eringen’s theory and its advantages over some other important theories have been discussed by Tomar and Goyal (2013).
Since the discovery of Rayleigh waves in 1885, as a special type of disturbance traveling along the free surface of a half-space, much attention has been devoted to the study of these kinds of surface waves. Specifically, in the field of mining, one requires a detailed understanding of wave propagation effects on surface structures due to underground excavation as well as surface mining. Jones (1961) was perhaps the first who studied Rayleigh waves in a poroelastic solid half-space using Biot’s theory. But there were shortcomings in his assumptions and approach. In particular, the solutions presented by Jones (1961) were mathematically incorrect (see Tajuddin 1984; Sharma 2012a), due to which the Jones model was not widely acceptable. Later, Tajuddin (1984) improved the Jones model and investigated the propagation of Rayleigh waves in a poroelastic half-space. There are reasonable grounds for the assumption that anisotropy (property of being directionally dependent) may exist in the continents. Anisotropy in the earth’s crust and upper mantle has significant effects on the wave characteristics. Keeping this fact in mind, Sharma and Gogna (1991) obtained frequency equation for the propagation of Rayleigh-type surface waves at the free surface of transversely isotropic liquid-saturated porous solids using Biot’s theory. In their work, they concluded that anisotropy in saturated poroelastic media has significant effects on both the existence and velocity of propagation of Rayleigh-type surface waves in the absence of dissipation.
Using mixture theory, Liu and de Boer (1997) studied the dispersion and attenuation of surface waves (Rayleigh waves and Love waves) in a fluid-saturated porous media. They showed that these surface waves may not be treated as true surface waves as these waves attenuate not only from but also along the surface of saturated porous medium. Therefore, Liu and de Boer called these surface waves as pseudo-surface waves in their work. Actually, a true surface wave propagates along the surface direction and decays exponentially with depth, while leaky surface waves (also called pseudo-surface waves in the literature) are attenuated in the surface direction and radiate energy into bulk or other surface waves. In the past decade, Lo (2008) developed an analytic model for the propagation and attenuation of Rayleigh-type waves along the free surface of an elastic media containing two immiscible, viscous, compressible fluids. By employing the theory of Lo et al. (2005) and Tuncay and Corapcioglu (1997), Sharma (2012b) obtained secular equation for the propagation of Rayleigh-type waves in partially saturated poroelastic solid. Later, Sharma (2014) investigated the propagation of Rayleigh waves in a double porosity solid.
In the present paper, we have derived the frequency equation of Rayleigh-type waves in a swelling porous half-space. It has been shown that there exists two modes of Rayleigh-type waves, both dispersive and attenuating. The layout of this paper is as follows: Sect. 2 contains the equations of motion for the linear homogeneous isotropic swelling porous medium developed earlier by Eringen (1994). This section also demonstrates the propagation of time harmonic waves existing in the swelling porous medium. In Sect. 3, frequency equation of Rayleigh-type surface waves has been derived. In Sect. 4, several special cases have been deduced theoretically including the case when porous medium is fluid saturated and when it is gas saturated earlier investigated by Gales (2004). In Sect. 5, we recast both phase speeds and corresponding attenuations of the existing Rayleigh-type waves for a specific model numerically, and the results obtained are depicted graphically. Section 6 contains the important inferences drawn from the study.
2 Governing Equations
The equations of motion for the isothermal linear homogeneous isotropic swelling porous elastic medium consisting of an elastic solid skeleton filled with gas (inviscid) and liquid (viscous) in the absence of body forces are given by (see Eringen 1994)
where \(\mathbf{u}^k~(k=s,\,f,\,g)\) is the displacement vector field; \(\rho ^{k}_{0}\) is the mass density of the k-phase in the natural state; \(\lambda \) and \(\mu \) are the well-known Lamé parameters; \(\sigma ^{a},\,\sigma ^{ab},\,\xi ^{ab}\,(a,b=f,g)\) and \(\lambda _{\nu },\,\mu _{\nu }\) are the constitutive constants. Superposed dot denotes the partial derivative with respect to time variable. We have used the superscripts s, f and g to denote, respectively, the elastic solid phase, fluid phase and the gas phase. The symmetric relations and restrictions on various constitutive constants have been given by Eringen (1994). These have also been reviewed in Tomar and Goyal (2013).
As explored in Tomar and Goyal (2013), introducing potentials \(\phi ^{k}\) and \({\pmb {\psi }}^{k}\) and taking the time harmonic form of the waves as
where \(\omega \) being the angular frequency, one obtains
where the expressions of various coefficients are given in “Appendix 1”.
The general solution of the above two equations can be written as
where \({\bar{\phi }}_{i}\,(i=1,2,3)\) and \({\bar{\pmb {\psi }}}_{j}\,(j=1,2)\) satisfy the following equations
The quantities \(k^2_{\alpha i}\) and \(k^2_{\beta j}\) are, respectively, the roots of following equations
Thus, there exists five basic waves consisting of three dilatational waves, say \(P_i~(i=1,2,3)\) and two shear waves, say \(S_j~(j=1,2)\) propagating with velocities \(v_{\alpha i}\) and \(v_{\beta j}\), respectively. The coupling \(f_i\) between (\({\bar{\phi }}^s,~{\bar{\phi }}^f\)), \(g_i\) between (\({\bar{\phi }}^s,~{\bar{\phi }}^g\)), \(\bar{f}_j\) between (\({\bar{\pmb {\psi }}}^s,~{\bar{\pmb {\psi }}}^f\)) and \(\bar{g}_j\) between (\({\bar{\pmb {\psi }}}^s,~{\bar{\pmb \psi }}^g\)) is given by
The phase speeds \((c_{\alpha i}, c_{\beta j})\) and corresponding attenuation \((|A_{\alpha i}|, |A_{\beta j}|)\) of the respective dilatational \(P_i-\)waves and shear \(S_j-\)waves can be obtained from the general formulae (31) and (32) given in Tomar and Goyal (2013).
3 Frequency Equation of Rayleigh-Type Wave
With reference to rectangular Cartesian coordinate system Oxyz, let us consider a swelling porous half-space H occupying the region \(z\ge 0\) such that the free plane boundary surface of H coincides with the horizontal plane \(z=0\). Let the surface wave be propagating along the positive direction of x-axis, and all the particles on a line parallel to y-axis are equally displaced so that all the field quantities are independent of y-coordinates. Thus, in the two-dimensional \((x-z)\) plane, we take \(\mathbf{u}^k=(u_x^k(x,z,t), 0, u_z^k(x,z,t)),\quad \frac{\partial }{\partial y} \equiv 0.\) For the Helmholtz resolution, the general displacement components in k-phase along x- and z-directions are given by
where the second component of vector \({\pmb {\psi }}^k\), i.e., \(\psi ^k_y\), has been denoted with \(\psi ^{k}\). Using the solutions of Helmholtz equations in (7) into equations in (4), the appropriate solutions representing the Rayleigh wave propagation are given by
where \(b^2_{\alpha i}=k^2_r-k^2_{\alpha i}\), \(b^2_{\beta j}=k^2_r-k^2_{\beta j}\) and \(k_r(= \mathfrak {R}(k_r)+\iota \mathfrak {I}(k_r))\) is the complex wavenumber corresponding to Rayleigh wave such that \(\mathfrak {R}(k_r)\ge 0\) to ensure the propagation of wave in the positive \(x-\)direction. The quantities \(E_i\) and \(F_j\) represent the amplitude constants. Since the quantities \(b_{\alpha i}\) and \(b_{\beta j}\) are complex valued, therefore, we can write the various potentials as follows
where \(\mathbf{r}= x \hat{x}+z\hat{z}\); \(\hat{x}\) and \(\hat{z}\) being the usual unit base vectors along x and z directions, respectively. And
\(\mathbf P\) and \(\mathbf A\) are known as propagation and attenuation vectors. Note that we shall take \(b_{\alpha i}=\text{ p.v. }\sqrt{k_r^2-k^2_{\alpha i}},\quad b_{\beta j}=\text{ p.v. }\sqrt{k_r^2-k^2_{\beta j}}\). By considering the principal value (p.v.) of “ ” implies \(\mathfrak {R}(b_{\alpha i})\ge 0\) and \(\mathfrak {R}(b_{\beta j})\ge 0\), which will ensure a known direction of attenuation with respect to \(z-\)direction. The above choice ensures that the direction of attenuation for the chosen solutions is in the positive \(z-\)direction and hence, the choice of solution represents a wave confined near the surface. It is also worth to note that waves will attenuate along the positive \(x-\) direction depending upon the value of \(\mathfrak {I}{(k_r)}\). Therefore, in a swelling porous medium consisting of solid, viscous liquid and gas, the Rayleigh surface waves cannot be treated as true surface waves. Because for true surface waves, the attenuation should be along the normal to propagation direction only. Further, from the expressions of propagation and attenuation vectors; and the wave number (\(k_r\)) being complex, it is clear that the waves are inhomogeneous as the surface of constant phase (\(\mathbf{P}\cdot \mathbf{r}\) = constant) is not parallel to the surface of constant amplitude (\(\mathbf{A}\cdot \mathbf{r}\) = constant). Also, the solutions (11) and (12) for the considered swelling porous elastic media differ from those chosen by Rayleigh for elastic media, but the results for an elastic half-space can be obtained as a special case from the above general solutions. As for elastic media, \(\mathfrak {I}(k_r)=\mathfrak {I}(b_{\alpha i})=\mathfrak {I}(b_{\beta j})=0\), hence the propagation vectors in (11) and (12) become parallel to the surface, while the attenuation vectors become perpendicular to the surface and the waves are treated as true surface waves. Thus, for the considered swelling porous media, propagation of true surface waves may be in very special case with many restrictions and such situation is rarely possible. This very fact is also depicted by Sharma (2012b) in his work for his problem in non-swelling porous media. Finally, the potentials corresponding to superposition of various dilatational and shear waves in the half-space will be
” implies \(\mathfrak {R}(b_{\alpha i})\ge 0\) and \(\mathfrak {R}(b_{\beta j})\ge 0\), which will ensure a known direction of attenuation with respect to \(z-\)direction. The above choice ensures that the direction of attenuation for the chosen solutions is in the positive \(z-\)direction and hence, the choice of solution represents a wave confined near the surface. It is also worth to note that waves will attenuate along the positive \(x-\) direction depending upon the value of \(\mathfrak {I}{(k_r)}\). Therefore, in a swelling porous medium consisting of solid, viscous liquid and gas, the Rayleigh surface waves cannot be treated as true surface waves. Because for true surface waves, the attenuation should be along the normal to propagation direction only. Further, from the expressions of propagation and attenuation vectors; and the wave number (\(k_r\)) being complex, it is clear that the waves are inhomogeneous as the surface of constant phase (\(\mathbf{P}\cdot \mathbf{r}\) = constant) is not parallel to the surface of constant amplitude (\(\mathbf{A}\cdot \mathbf{r}\) = constant). Also, the solutions (11) and (12) for the considered swelling porous elastic media differ from those chosen by Rayleigh for elastic media, but the results for an elastic half-space can be obtained as a special case from the above general solutions. As for elastic media, \(\mathfrak {I}(k_r)=\mathfrak {I}(b_{\alpha i})=\mathfrak {I}(b_{\beta j})=0\), hence the propagation vectors in (11) and (12) become parallel to the surface, while the attenuation vectors become perpendicular to the surface and the waves are treated as true surface waves. Thus, for the considered swelling porous media, propagation of true surface waves may be in very special case with many restrictions and such situation is rarely possible. This very fact is also depicted by Sharma (2012b) in his work for his problem in non-swelling porous media. Finally, the potentials corresponding to superposition of various dilatational and shear waves in the half-space will be
3.1 Boundary Conditions
In the present problem, the boundary surface of the porous elastic half-space is flat and mechanically stress free. Motivated by the ideas of Deresiewicz and his co-workers (Deresiewicz 1960; Deresiewicz and Rice 1962; Deresiewicz and Skalak 1963), the appropriate boundary conditions to be satisfied at \(z=0\) are given by
Here, we have considered the the case of sealed surface pores as considered previously by Gales (2004) separately for the cases of only fluid saturation and only gas saturation and hence the displacement of fluids relative to the solid skeleton should vanish at the boundary. With the aid of constitutive relations (4)–(7) in Tomar and Goyal (2013) and (9), one can express these boundary conditions in potential forms and then inserting the relevant potentials from (13)–(14) into those, we obtain a homogeneous set of five equations in the unknown constants \(E_1\), \(E_2\), \(E_3\), \(F_1\) and \(F_2\) as
where \(L_i=a_{11}+f_ia_{12}+g_ia_{13}\), \(M_i=a_{12}+f_ia_{22}+g_ia_{23}\), \(N_i=a_{13}+f_ia_{23}+g_ia_{33}\), \(\varLambda _{\alpha i}^2=1-\frac{k^2_{\alpha i}}{k_r^2}\), \(\varLambda _{\beta j}^2=1-\frac{k^2_{\beta j}}{k_r^2}\). The condition of non-trivial solution of above system of equations is that the determinant of the coefficient matrix must vanish. This provides us the secular equation of Rayleigh-type waves in question in the determinant form given by
The above determinantal equation can be expressed as
which is an irrational equation due to the presence of radicals in it. This equation cannot be solved through algebraic methods easily. After squaring four times and manipulating, this irrational equation is then rationalized into a polynomial in \(k_r,\) whose implicit form is given by
The expressions of various notations used in (16) to (18) are given in “Appendix 2”. This equation will provide us the speeds of Rayleigh-type modes existing in question. The roots given by (18), which also satisfy the original Eq. (17) will correspond to wavenumbers of Rayleigh-type surface waves in the swelling porous half-space. Rest of the roots which do not satisfy (17) will not be considered as they are extraneous roots. The phase speeds \(c_r\) and the magnitudes of corresponding attenuation vectors \(\mathbf{A}_r\) of the Rayleigh-type surface waves can be obtained using the following formulae
3.2 Particle Motion
In this section, we shall discuss the particle motion characteristics for a Rayleigh-type surface waves, that is, we will attempt to describe the curve traced by the oscillating particles of dissipative porous solid during the propagation of Rayleigh-type waves. For the considered two-dimensional problem in xz-plane, the total displacement components \(U_x\) and \(U_z\) of porous aggregate (that is, of solid, fluid and gas phases) along x and z directions are given by
On inserting the expressions of various potentials, we get
where
But for the particle motion, the components of physical displacement field for the Rayleigh-Type surface wave are written as
The above expression is the parametric equation representing the curve traced by the particles in space with respect to the chosen coordinate system in the considered medium during the passage of Rayleigh-type surface wave. From Eq. (20), we get
where
and \(D_0=(\cos \zeta )~\exp {[-\mathfrak {I}(k_r)x]},\quad \zeta =\arg U_0-\arg W_0.\)
For a specific given particle, the coefficients \(A_0,\) \(B_0\) and \(C_0\) are constants with respect to time and further for \(\zeta \ne \pi /2\), the discriminant of Eq. (21) is negative i.e., \(B_0^2-4A_0C_0<0\), indicating that it describes an ellipse. Thus the parametric Eq. (20) represent the equation of an ellipse as a function of time.
4 Special Cases
Gales (2004) derived the frequency equation of Rayleigh-type wave propagation within the context of isothermal linear theory of swelling porous elastic soils. In Gale’s formulation, the porous medium with fluid saturation and porous medium with gas saturation have been considered separately. While in the present formulation, we have considered the porous medium saturated with fluid and gas together. Therefore, the frequency equation of Rayleigh-type wave propagation obtained in this paper is a generalization of the frequency equations obtained by Gales (2004). In this section, we shall recover the frequency equations of Rayleigh-type waves derived by him. The reduction of frequency equations in case of fluid or gas saturation alone directly from the frequency equation of the general case given in the present form (i.e., the determinental equation form) is not possible because of two main reasons: (i) In case of either fluid saturation or gas saturation, the order of determinant occurring in the frequency equation will be less than the order of those occurring in the general case. This is quite obvious as one has to employ less number of boundary conditions in each case of Gales (2004) than those in the general case considered here; and (ii) the expressions of coupling coefficients may acquire an indeterminate form and the characteristic equations will have no meaning. Hence, to deduce the frequency equations in the cases of either fluid saturation alone or in case of gas saturation alone or even in case of classical solid, we need to reduce the equations step by step. The various reductions have been explained as follows
4.1 The Case of Fluid Saturation
Here, we shall neglect the presence of gas constituent from the porous medium. In this case, the coefficients arising due to the presence of gas constituent will vanish, i.e., \(\sigma ^g=\sigma ^{fg}=\sigma ^{gg}=\xi ^{fg}=\xi ^{gg}=\rho _o^g=0\) and \(\chi _{fg}=\chi _{gg}=\chi _g=\varOmega _g=0\). With these considerations, the characteristic equations for this case reduce to
where \({\hat{A}}=a_{11}a_{22}-a^2_{12}\), \({\hat{B}}=a_{11}\varOmega _f+a_{22}\rho _0^s+(a_{22} +2a_{12})\chi _{ff}\), \({\hat{C}}=\rho _0^s\rho _0^f+\chi _{ff}(\rho _0^s+\rho _0^f)\), \({\hat{\bar{A}}}={\bar{a}}_{11}{\bar{a}}_{22}\) and \({\hat{\bar{B}}}={\bar{a}}_{11}\varOmega _f+{\bar{a}}_{22}(\rho _0^s+\chi _{ff})\). Equations (22) and (23) explains the existence of two dilatational and two shear waves in case of fluid saturation having wave numbers \({{\hat{k}}_{\alpha j}}\) and \({{\hat{k}}_{\beta j}}\), respectively. Moreover, the coupling coefficients between \({\phi }^s\), \(\phi ^f\) and between \({\psi }^s\), \({\psi }^f\) reduce to
where \({{\hat{k}}_{\alpha j}}^2\) and \({{\hat{k}}_{\beta j}}^2\) are the roots of Eqs. (22) and (23), respectively. One can easily verify the above expressions of coupling coefficients and characteristic equations are exactly the same as given by Gales (2004) under Eqs. (5.12), (4.4), (5.10).
The appropriate expressions of the potentials in the present case will reduce to
where \({\hat{b}}_{\alpha j}=\text{ p.v. }\sqrt{{\hat{k}}_r^2-{\hat{k}}^2_{\alpha j}},{\hat{b}}_{\beta j}=\text{ p.v. }\sqrt{{\hat{k}}_r^2-{\hat{k}}^2_{\beta j}}\) have been set and \({\hat{k}}_r(=\mathfrak {R}({\hat{k}}_r)+\iota \mathfrak {I}({\hat{k}}_r))\) are the complex wavenumbers corresponding to Rayleigh-type surface wave in the present case such that \(\mathfrak {R}({\hat{k}}_r)\ge 0\) to ensure the propagation of wave in the positive \(x-\)direction.
Further, in the absence of gas phase, the last boundary condition in (15), namely \(u^s_z-u^g_z=0\), is meaningless. So by redesignating the coefficients as \(E_1={\hat{E}}_1\), \(E_2={\hat{E}}_2\), \(F_1={\hat{F}}_1\) and \(F_2={\hat{F}}_2\), the remaining four boundary conditions will reduce to Equations in (5.16) of Gales (2004) for the relevant problem.
4.2 The Case of Gas Saturation
In this case, we shall assume that the liquid component is absent; therefore, the quantities \(\sigma ^f=\sigma ^{fg}=\sigma ^{ff}=\xi ^{fg}=\xi ^{ff}=\rho _o^f=\lambda _{\nu }=\mu _{\nu }=0\) and \(\chi _{fg}=\chi _{ff}=\chi _f=\varOmega _f=0\), and following the same procedure as in case of fluid saturation given above, one obtains the same equations as given in equation (5.25) of Gales (2004) for the relevant problem.
4.3 The Case of Classical Solid
Here, we shall assume that both liquid and gas components are absent. Taking only \(a_{11}\ne 0\), \({\bar{a}_{11}}\ne 0\) and \(\varOmega _s=\rho _0^s\), we obtain
which are the well-known equations of dilatational and shear waves of classical elasticity. The expressions of potentials \(\phi ^s\) and \(\psi ^s\) will reduce to the following by taking \(E_1=E_c\) and \(F_1=F_c\) as
where \(b_{\alpha }^2=k_c^2-k_{\alpha }^2=k_c^2(1-\frac{c^2_c}{c^2_{\alpha }}),\) \(b_{\beta }^2=k_c^2-k_{\beta }^2=k_c^2(1-\frac{c^2_c}{c^2_{\beta }});\) \(c^2_{\alpha }=\frac{\omega ^2}{k_{\alpha }^2}=\frac{a_{11}}{\rho _0^s}\) and \(c^2_{\beta }=\frac{\omega ^2}{k_{\beta }^2}=\frac{{\bar{a}}_{11}}{\rho _0^s},\) are the propagation velocities of the two body waves (P-wave and S-wave); \(k_c\) and \(c_c\) being the wavenumber and phase speed corresponding to classical Rayleigh wave with the conditions \(c_{\alpha }>c_c\) and \(c_{\beta }>c_c.\)
In the absence of liquid and gas phases, the boundary conditions \(u^s_x-u^f_x\), \(u^s_z-u^f_z\) and \(u^s_z-u^g_z\) will have no physical meaning. The remaining boundary conditions in this case provide us the following well-known frequency equation of classical Rayleigh wave
5 Numerical Results and Discussion
For the purpose of numerical computations, we consider a specific model consisting of sandstone, water/oil and carbon dioxide as general swelling porous solid. This model is taken in the spirit of mixtures found in water/oil exploration industry, where liquid is viscous and accompanied by gas in underground porous rocks. The numerical values of the common constitutive constants involved in the present model are computed from the data of the model considered earlier by Garg and Nayfeh (1986). The relations given in Tuncay and Corapcioglu (1997) were quite helpful to calculate the values of the various constitutive constants involved in our work for all the three phases of the porous medium of dry porous rock with volume fraction of gas–fluid equals to 0.2. While the values of coefficients \(\lambda _\nu , \mu _\nu \) and \(\xi ^{fg}\) are considered hypothetically within physically suitable limit, the values of all relevant elastic parameters involved in the present model are given in Table 1.
Using the above numerical values, the wavenumbers and phase speeds of all the propagating dilatational and shear waves in the considered swelling porous media are computed from (7)–(8). The three dilatational waves and the two shear waves in the porous medium are designated as \(P_i\) and \(S_j\) waves with propagation velocities \(v_{\alpha i}\) and \(v_{\beta j}\), respectively, on the basis of same criterion as was followed in Tomar and Goyal (2013). Thus, the dilatational wave \(P_1\) and shear wave \(S_1\) are regarded as the fast propagating dilatational and shear waves, respectively, among others. To find the speed of Rayleigh-type wave in swelling porous medium, the frequency Eq. (18) is solved numerically. The roots, which do not satisfy original complex irrational dispersion Eq. (17), are discarded. Moreover, only those roots are identified as the wavenumbers of the Rayleigh-type surface waves, which qualify to represent their propagation, that is, the roots for which the restrictions \(\mathfrak {R}(k_r), \mathfrak {R}(b_{\alpha i}), \mathfrak {R}(b_{\beta j}) \ge 0\), are being satisfied simultaneously. The phase speeds and magnitude of attenuations of the existing Rayleigh-type surface waves are then computed by using formulae (19).
It is interesting to note that each time for a given frequency, two roots are found to qualify the conditions of Rayleigh-type surface waves showing the existence of two modes of Rayleigh-type surface wave. The existence of more than one modes of Rayleigh-type surface wave in a dissipative medium has also been mentioned by Currie et al. (1977). Recently, Sharma (2012c, 2014) has also verified this very fact, that is, the existence of second mode of Rayleigh-type surface waves in the porous medium. Sharma (2012c) attributed the existence of new mode of Rayleigh-type wave to dissipation due to anelastic (viscoelastic) frame and/or the presence of viscous pore fluid in his work. In the present work, the two admissible modes of Rayleigh-type waves can be classified as an elastic Rayleigh-type \(R_1-\)wave (always present) and an additional (second) Rayleigh-type \(R_2-\)wave (present for all cases except for classical case). The first Rayleigh mode \(R_1-\) is analogous to classical Rayleigh-type surface wave whose phase speed is less than each one of the two main body waves (\(P_1\) and \(S_1\) waves), while the second Rayleigh-type \(R_2-\) wave is new and arises due to the presence of liquid and/or gas phases in the porous medium. It is found that both modes are dispersive and attenuated for given frequency range. To avoid ambiguity in the discussion of numerical results, the abbreviation SLG, SL, SG and S is used to refer porous medium saturated with fluid and gas, fluid saturation alone, gas saturation alone and the case of elastic solid. The nature of dependence of phase speed and attenuation of the two Rayleigh-type surface waves in the selected media (SLG, SL, SG, S) on the frequency parameter and their comparison has been shown graphically through Figs. 1, 2, 3, 4, 5 and 6.
In Fig. 1a, c, phase speeds of the two existing Rayleigh-type surface wave (say \(c_{r1}\), \(c_{r2}\)) in SLG case are plotted as function of frequency, while the corresponding maximum attenuations (say \(|\mathbf{A}_{r1}|\), \(|\mathbf{A}_{r2}|\)) in the same case have been depicted in Fig. 1b, d. We clearly see that phase speed (attenuation) of the second mode of Rayleigh-type surface wave (\(R_2-\) wave) is much higher (much lower) than that of first Rayleigh-type surface wave (\(R_1-\)wave). We also notice that both the phase speeds corresponding to the two Rayleigh-type surface waves increase gradually with increase in frequency starting with a value \(c_{r1}\simeq 1412.8\,ms^{-1}\), \(c_{r2}\simeq 3283.7\,ms^{-1}\) at \(\omega = 1\,rad/s\) and finally become almost constant with values \(c_{r1}\simeq 1676.4\,ms^{-1}\), \(c_{r2}\simeq 3901.9\,ms^{-1}\), respectively, in higher frequency range (i.e., \(\omega >40\times 10^4\,rad/s)\). And from Fig. 1b, d, we see that the the curves corresponding to maximum attenuations follow almost similar trend, and these also increase slowly with increase in frequency starting with values of \(|\mathbf{A}_{r1}|\simeq 9.8\times 10^{-9}\,m^{-1}\), \(|\mathbf{A}_{r2}|\simeq 1.2\times 10^{-9}\,m^{-1}\), at \(\omega =1\,rad/s\) and finally become almost constant with values \(|\mathbf{A}_{r1}|\simeq 0.42\,m^{-1}\), \(|\mathbf{A}_{r2}|\simeq 0.19\,m^{-1},\) in higher range of frequency.

SLG: Phase speeds and attenuations of two modes of Rayleigh-type surface waves with frequency parameter; a–b first Rayleigh-type wave; and c–d second Rayleigh-type wave

SL: Phase speeds and attenuations of two modes of Rayleigh-type surface waves with frequency parameter; a–b first Rayleigh-type wave; and c–d second Rayleigh-type wave

SG: Phase speeds and attenuations of two modes of Rayleigh-type surface waves with frequency parameter; a–b first Rayleigh-type wave; and c–d second Rayleigh-type wave

Phase speeds of the existing two modes of Rayleigh-type surface waves with frequency parameter in all the considered media; a first Rayleigh wave and b second Rayleigh wave

Phase speeds: comparison between the existing two modes of Rayleigh-type surface waves and the main body waves in all the considered media; a SLG, b SL, c SG, and d S

Phase speeds and attenuations—Effect of pore fluid viscosity: comparison between water and oil for the existing two modes of Rayleigh-type surface waves with frequency parameter in SLG; a–b first Rayleigh wave and c–d second Rayleigh wave
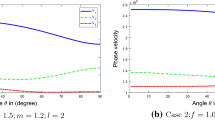
For the cases of SL and SG, the variation of phase speeds of both the first Rayleigh-type \(R_1-\)wave and the second Rayleigh-type \(R_2-\)wave have been depicted through Figs. 2a, c and 3a, c, respectively, while their corresponding attenuations have been depicted through Figs. 2b, d and 3b, d, respectively. From Fig. 2, in the case SL, we see that the phase speeds and attenuations of both first \(R_1\) and second \(R_2\) Rayleigh- type surface waves increase gradually with frequency, and thereafter these become constant in higher frequency range. Similarly, from Fig. 2b, d, we see that maximum attenuation corresponding to both the waves increases initially and then become constant in higher frequency range. A similar trend of dependence of phase speeds and attenuations of both the existing \(R_1-\) and \(R_2-\) waves on frequency parameter is being observed for the case of SG and has been depicted through Fig. 3 with one exception that the maximum attenuation corresponding to the primary \(R_1-\) wave first increases with frequency attains its maximum and then starts decreasing very slightly before becoming constant in higher frequency range. It is also interesting to mention in this case of gas saturation alone (SG case) that the magnitudes of maximum attenuations are very very small in comparison with the cases of SLG and SL. This may be attributed to the presence of viscous liquid in both the cases of SLG and SL, which makes the porous medium more dissipative and results in higher attenuations of the propagating Rayleigh-type surface waves.
Figure 4 depicts the comparison of phase speeds of both modes of Rayleigh-type waves in SLG, SL, SG and S cases. It can be observed that the presence of second mode of Rayleigh wave \(R_2\) is due to the presence of fluid constituents in the porous medium. The respective behavior of \(R_1\) and \(R_2\) with frequency is almost same for SLG and SL cases, except in very low frequency range where the corresponding modes are distinct. The phase speed of \(R_1\) mode in SLG and SL cases is found to be significantly lower than the speed of classical Rayleigh mode. However, in the case of SG, the phase speed of \(R_1\) mode almost matches with that of classical Rayleigh mode except in very small range of low frequency. The phase of \(R_2\) mode in SLG and SL cases is found to be less than that of in SG case throughout the frequency range considered. This shows that both the modes of Rayleigh-type waves are highly influenced by the presence of liquid phase in the porous medium.
Figure 5 depicts the comparison of speeds of both the modes of Rayleigh-type wave with that of the fast dilatational and shear waves in all the considered cases. It can be observed that the speed of \(R_1\) mode is always less than that of the \(P_1\) and \(S_1\) waves, while the speed of \(R_2\) mode is always higher than the speed of \(P_1\) and \(S_1\) waves.
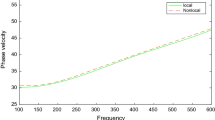
We have also checked the influence of viscosity of the fluid present in the pores of the considered swelling porous media on the phase speeds and attenuations of both the existing Rayleigh-type surface waves. For this purpose, we have considered two different fluids with different values of viscosity coefficients. This effect of viscosity is depicted through Fig. 6. The solid line represents the case of water (W) as fluid with low viscosity coefficient \(\mu _\nu =8.88\times 10^{-4}\,Ns/m^2\), while the dotted line represents the same for natural crude oil (O) with high viscosity coefficient \(\mu _\nu =1000\times 10^{-3}\,Ns/m^2\).
We see that there is hardly any effect of viscosity on the phase speeds and attenuations of the propagating modes of Rayleigh-type surface waves in the considered SLG media. This very negligible effect of the viscosity of pore fluids on the propagation characteristics of the two Rayleigh modes may be attributed to the fact that the presence of viscosity affects only the propagation of second extra shear wave (see Tomar and Goyal 2013; Goyal and Tomar 2015a, b) existing in the swelling porous media, which is highly attenuating. Since Rayleigh modes are the combination of dilatational and shear waves propagating in that medium and the second shear wave are so small in magnitude (even in the case of highly viscous fluid) that its contribution to Rayleigh modes may not be appreciable. Therefore, the effect of viscosity on the propagation of Rayleigh modes is almost negligible. A similar kind of observation is also noticed in the case of fluid saturation (SL) too, where again the effect of viscosity is negligible.
6 Conclusions
Using Eringen’s theory of swelling porous soils containing elastic solid matrix, viscous liquid and inviscid gas, we have derived the frequency equation for the propagation of Rayleigh-type surface waves. The frequency equation is then solved numerically for specific porous soils. Two modes of Rayleigh waves have been obtained in the porous half-space. The phase speeds and the corresponding attenuation coefficients are computed for a particular model. The phase speed of second Rayleigh mode is much greater than the phase speed of primary Rayleigh mode. The main observations are as follows:
-
1.
Rayleigh-type waves found in the considered swelling porous media cannot be treated as true Rayleigh waves as they behave differently than that of in the classical case. These waves attenuate not only along the normal to the surface but also attenuate along the direction of propagation depending upon the value of the imaginary part of its wavenumber \(\mathfrak {I}{(k_r)}\). Moreover, the phase planes and amplitude planes are found to be not parallel to each other; hence, the existing Rayleigh waves are inhomogeneous in nature.
-
2.
Two different modes of Rayleigh-type waves have been observed in the considered swelling porous medium and in all its special cases, except for the reduced classical solid case. The existence of additional Rayleigh-type surface wave in the considered media is due to the dissipative nature of the media.
-
3.
The phase speed of first Rayleigh-type mode is always found to be less than the phase speeds of both main body waves (\(P_1\) and \(S_1\) waves) in the considered model and in all the considered special cases, while that of second Rayleigh-type mode is always higher than the phase speeds of both main body waves. These observations are in concurrence with those suggested earlier in Currie et al. (1977).
-
4.
The phase speeds and corresponding maximum attenuations of each of the the existed Rayleigh-type modes in all the considered cases of dissipative media largely depend on frequency. That is, the waves are clearly dispersive for all the cases of porous half-space.
-
5.
The effect of fluid viscosity present in the pores is negligible on the phase speeds of existing Rayleigh-type modes.
The associated aspects of the present work may be important in the fields of seismology to better understand the wave propagation during disasters like earthquake and in reducing the potentials caused during these disasters. The consideration of swelling porous solid with viscous liquid and gas offers a bit more realistic approach. The properties of existing second mode of Rayleigh-type surface waves in the swelling porous media may be an important topic for further studies.
References
Berryman, J.G., Thigpwn, L., Chin, R.C.Y.: Bulk elastic wave propagation in partially saturated porous solids. J. Acoust. Soc. Am. 84(1), 360–373 (1988)
Biot, M.A.: General theory of three dimensional consolidation. J. Appl. Phys. 12(2), 155–164 (1941)
Biot, M.A.: The theory of propagation of elastic waves in a fluid-saturated porous solid. I. low-frequency range. J. Acoust. Soc. Am. 28, 168–178 (1956a)
Biot, M.A.: The theory of propagation of elastic waves in a fluid-saturated porous solid. II. higher-frequency range. J. Acoust. Soc. Am. 28, 179–191 (1956b)
Brutsaert, W.: The propagation of elastic waves in unconsolidated unsaturated granular medium. J. Geophys. Res. 69, 243–257 (1964)
Coussy, O.: Mechanics and physics of porous solids. Wiley, West Sussex (2010)
Currie, P.K., Hayes, M.A., O’Leary, P.M.: Viscoelastic Rayleigh waves. Quar. Appl. Maths. 35, 35–53 (1977)
Deresiewicz, H.: The effect of boundaries on wave propagation in a liquid-filled porous solid: I. Reflection of plane waves at a free plane boundary (non-dissipative case). Bull. Seism. Soc. Am. 50(4), 599–607 (1960)
Deresiewicz, H., Rice, J.T.: The effect of boundaries on wave propagation in a liquid-filled porous solid: III. Reflection of plane waves at a free plane boundary (general case). Bull. Seism. Soc. Am. 52(3), 595–625 (1962)
Deresiewicz, H., Skalak, R.: On uniqueness in dynamic poroelasticity. Bull. Seism. Soc. Am. 53(4), 783–788 (1963)
Eringen, A.C.: A continuum theory of swelling porous elastic soils. Int. J. Eng. Sci. 32, 1337–1349 (1994). [Corrigendum, ibid, 42,949–949(2004)]
Gales, C.: Waves and vibrations in the theory of swelling porous elastic soils. Eur. J. Mech.-A/Solids. 23, 345–357 (2004)
Garg, S.K., Nayfeh, A.H.: Compressional wave propagation in liquid and/or gas saturated elastic porous media. J. Appl. Phys. 60, 3045–3055 (1986)
Goyal, S., Tomar, S.K.: Reflection and transmission of inhomogeneous waves at the plane interface between two dissimilar swelling porous half-spaces. Spec. Top. Rev. Porous Media Int. J. 6(1), 51–69 (2015a)
Goyal, S., Tomar, S.K.: Reflection/refraction of a dilatational wave at a plane interface between uniform elastic and swelling porous half-spaces. Transp. Porous Media 109, 609–632 (2015b)
Jones, J.P.: Rayleigh waves in a porous, elastic, saturated solid. J. Acoust. Soc. Am. 33(7), 959–962 (1961)
Leclaire, P., Cohen-Tenoudji, F., Puente, J.A.: Extension of Biot’s theory of wave propagation to frozen porous media. J. Acoust. Soc. Am. 96, 3753–3768 (1994)
Liu, Z., de Boer, R.: Dispersion and attenuation of surface waves in a fluid-saturated porous medium. Trans. Porous Med. 23, 207–223 (1997)
Lo, W.-C.: Propagation and attenuation of Rayleigh waves in a semi-infinite unsaturated poroelastic medium. Adv. Water Resour. 31, 1399–1410 (2008)
Lo, W.C., Sposito, G., Majer, E.: Wave propagation through elastic porous media containing two immiscible fluids. Water Res. Res. 41(2), W02025 (2005)
Plona, T.J.: Observation of second bulk compressional wave in a porous medium at ultrasonic frequencies. Appl. Phys. Lett. 36, 259–261 (1980)
Santos, J.E., Corbero, J.M., Douglas, J.J.: Static and dynamic behaviour of a porous solid saturated by a two-phase fluid. J. Acoust. Soc. Am. 87, 1428–1438 (1990a)
Santos, J.E., Corbero, J.M., Douglas, J.J., Lovera, O.M.: A model for wave propagation in a porous medium saturated by a two-phase fluid. J. Acoust. Soc. Am. 87, 1439–1448 (1990b)
Sharma, M.D.: Comments on paper Propagation and attenuation of Rayleigh waves in a semi-infinite unsaturated poroelastic medium by W.-C. Lo [Adv. Water Resour. 31 (2008) 1399–1410]. Adv. Water Resour. 39, 137–138 (2012a)
Sharma, M.D.: Rayleigh waves in a partially saturated poroelastic solid. Geophys. J. Int. 189, 1203–1214 (2012b)
Sharma, M.D.: Rayleigh waves in dissipative poro-viscoelastic media. Bull. Seism. Soc. Am. 102, 2468–2483 (2012c)
Sharma, M.D.: Effect of local fluid flow on rayleigh waves in a double porosity solid. Bull. Seism. Soc. Am. 104, 2633–2643 (2014)
Sharma, M.D., Gogna, M.L.: Wave propagation in anisotropic liquid-saturated porous solids. J. Acoust. Soc. Am. 90(2), 1068–1073 (1991)
Tajuddin, M.: Rayleigh waves in a poroelastic half-space. J. Acoust. Soc. Am. 75, 682–684 (1984)
Tomar, S.K., Goyal, S.: Elastic waves in swelling porous media. Transp. Porous Media 100(1), 39–68 (2013). [Erratum to: Elastic waves in swelling porous media, ibid, 103(2), pp. 315–324, 2014]
Tuncay, K., Corapcioglu, M.Y.: Wave propagation in poroelastic media saturated by two fluids. J. Appl. Mech. 64, 313–320 (1997)
Acknowledgments
Authors are grateful to the unknown reviewers for their critical evaluation and useful suggestions, which had led to an improvement in the manuscript. One of the authors Suraj Goyal (SG) acknowledges the facilities provided by the Department of Mathematics, Panjab university, Chandigarh, India, to complete this work.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
The explicit expressions of the various coefficients are as:
Appendix 2
The explicit expressions of the various coefficients used in the determinantal equation of the Rayleigh wave are as:
The explicit expressions of the various coefficients used in the secular equation of the Rayleigh wave are as:
where
Rights and permissions
About this article

Cite this article
Goyal, S., Singh, D. & Tomar, S.K. Rayleigh-Type Surface Waves in a Swelling Porous Half-Space. Transp Porous Med 113, 91–109 (2016). https://doi.org/10.1007/s11242-016-0681-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11242-016-0681-3