
Abstract
Nonlocality is one of the distinctive features of quantum mechanics and has different forms in practice, e.g., non-separability, quantum steering, and Bell nonlocality. Here, by exploiting the high-dimensional probability tensor, we propose a quantum magic square model to characterize the diverse forms of nonlocal phenomena in a single protocol. In this model, the nonlocalities are manifested in the partial-sums of the probability tensor, where the uncertainty relation serves as an “indicator” of different nonlocal phenomena. We derive a conditional majorization uncertainty relation criterion to witness the quantum steering. The new criterion is applicable to infinite number of observables and is found superior to the formerly thought optimal steering criterion.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Entanglement is a unique nature of the quantum world and now plays a key role in implementing many quantum information tasks [1]. The first application of the entangled state may date back to the EPR paradox [2], where Einstein, Podolsky, and Rosen questioned the completeness of the quantum mechanics. Schrödinger coined the term “entanglement” to describe those peculiarly correlated systems: one may steer part of the system in spite of no access to it [3]. Later Bell introduced an inequality in 1964 [4] to exhibit the nonlocality of the entangled system. It was not until 2007 that people realized [5] that the quantum steering is a distinct nonlocal phenomenon from the Bell nonlocality.
As it is well-known that the Bell nonlocality may manifest in the violations of various Bell inequalities [6, 7], while the ascertainments of quantum steering and non-separability are subject to different criteria [8, 9], e.g., the criteria as per correlation function [10, 11] or uncertainty relation [12, 13]. Recently, some delicate measures [14, 15] were employed to witness the entanglement or steerability. But so far, the question of finding practical necessary and sufficient conditions for steerability or non-separability still remains open. It is worth mentioning that usually the criteria based on uncertainty relations have clear physical meanings and function well [16]. However, ascertaining the optimal lower bound of the uncertainty relation, which is crucial in detecting quantum steering or separability, turns out to be also a challenge [17]. Remarkably, the optimal bound for direct sum majorization uncertainty relation is obtained by virtue of the lattice theory recently [18].
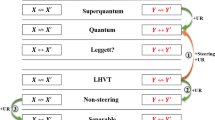
In this paper, we propose a quantum magic square (QMS) model to study the quantum nonlocality, where different forms of nonlocality can be distinguished by the uncertainty relation ranging from Bell nonlocality/locality to one-way/two-way quantum steering and then to the separability. In Sect. 2, we introduce the QMS for the Bell nonlocality and quantum steering systems in light of the magic square game. A steering criterion is derived based on the QMS model in Sect. 3, by exploring the optimal majorization uncertainty relation. It is shown that the criterion is applicable to arbitrary number of observables and is found superior to those ever thought to be the optimal ones via concrete examples. In Sect. 4, the separability within the QMS is briefly discussed. And, a summary is presented in Sect. 5.
2 The QMS and quantum nonlocalities
The classical magic square goes as follows: fill an \(n\times n\) square grid with distinct positive integers on each cell, provided that the sum of the integers in each row, column and diagonal are equal (to given value of 15 for \({ n}=3\)), see Fig. 1. In a bipartite quantum system, the joint measurements on observables X and Y on both sides lead to a distribution P(X, Y). Two different joint distributions P(X, Y) and \(P(X',Y')\) may be regarded as the marginals of a higher dimensional distribution \(m_{XX'YY'}\): one may fill \(m_{XX'YY'}\) with nonnegative numbers, provided that the sum of generalized “columns” or “rows” of \(m_{XX'YY'}\) is equal to given marginals P(X, Y) and \(P(X',Y')\), i.e., \(P(X,Y) = \sum _{X',Y'} m_{XX'YY'}\). In this sense, we call \(m_{XX'YY'}\) the QMS for measurements X, \(X'\), Y, and \(Y'\). Though being in the same spirit as Fine’s hidden-variable model while Bell nonlocality is concerned [19], the QMS is applicable to witness the quantum steering and non-separability of quantum state as well. We shall show how different types of nonlocalities emerge when filling the \(m_{XX'YY'}\) with given marginals.

The \(3\times 3\) magic square. In this classical magic square, the sums of the elements in each row, column, and diagonal all return a 15
It should be noted that of the bipartite system A(lice) and B(ob), the local observables X and Y should be understood as \(X\otimes I\) and \(I\otimes Y\). If \(\rho _{AB}\) is entangled and exhibits Bell nonlocality, the joint distribution does not admit the following decomposition
Here \(\lambda \) denotes the possible hidden variable with normalized weights \(\kappa _\lambda \), and \(\forall \lambda \), \(\sum _i p_{i}^{(\lambda )}(x) = \sum _j q_j^{(\lambda )}(y)=1\) are two normalized distributions depending on X and Y, respectively. For different measurements X and \(X'\) on A, the joint distributions P(X, Y) and \(P(X',Y)\) can be expressed as the marginals of a high dimensional tensor \(m_{ii'j}\)
where \(m_{ii'j} \equiv \sum _\lambda \kappa _\lambda \cdot \left[ p^{(\lambda )}_{i}(x) p^{(\lambda )}_{i'}(x') \right] q^{(\lambda )}_j(y)\). We may further define the following
Here \(\vec {m}_{ii'}(y)= \sum _{\lambda } \kappa _{\lambda } \cdot \left[ p^{(\lambda )}_{i}(x) p^{(\lambda )}_{i'}(x') \right] \vec {q}^{\, (\lambda )}(y)\). Now, \(\vec {m}_{i}(y)\) and \(\vec {m}'_{i'}(y)\) represent the ith and \(i'\)th rows of P(X, Y) and \(P(X',Y)\), see Fig. 2a.
Furthermore, for measurements Y and \(Y'\) on B there exist the tensor
where we call \(m_{ii'jj'}\) the QMS of the bipartite system for measurements X, \(X'\), Y, and \(Y'\). Clearly, joint distributions can be obtained from the QMS by partial sums, e.g., \(P_{ij'}(X,Y') = \sum _{i',j}m_{ii'jj'}\). The generalization to tripartite system with measurements X and \(X'\), Y and \(Y'\), Z and \(Z'\) on each particle is straightforward,
Here \(m_{ii'jj'kk'}\) is the QMS of tripartite system for measurements of X and \(X'\), Y and \(Y'\), Z and \(Z'\). It is easy to verify
Note, with QMS both Bell and GHZ theorems can be obtained, see the Supplement Material A for details.

The QMS representations of Bell locality and non-steering. (a) The cubic cells stand for the unnormalized distribution vectors \(\vec {m}_{ii'}(y)\) and \(\vec {m}_i(y)=\sum _{i'}\vec {m}_{ii'}(y)\); (b) The cubic cells stand for the unnormalized state \(m_{ii'}(\rho )\) and \(\sigma _{i|x} = \sum _{i'} m_{ii'}(\rho )\). Similarly, summing over the index i gives \(\vec {m}'_{i'}(y)\) and \(\sigma _{i'|x'}\)
According to Wiseman et al. [5], if A cannot steer B, then B admits the following decomposition with density matrices \(\rho ^{(\lambda )}\) and normalized weights \(\xi _{\lambda }\)
where \(\forall \lambda \), \( \sum _i p_{i}^{(\lambda )}(x) = 1\) and \(\sigma _{i|x}\) is called the assemblage describing the unnormalized quantum state of B conditioned on the measurement outcome \(x_{i}\) for the measurement X on A [21]. For different measurements X and \(X'\), two quantum assemblages can be obtained
Here \(m_{ii'}(\rho ) \equiv \sum _{\lambda } \xi _{\lambda } \left[ p^{(\lambda )}_{i}(x) p^{(\lambda )}_{i'}(x') \right] \rho ^{(\lambda )}\) with \( p_{i}^{(\lambda )}(x)\) and \(p_{i'}^{(\lambda )}(x')\) being normalized distributions for all \(\lambda \). We call \(m_{ii'}(\rho )\) the QMS representation of the bipartite state for measurements X and \(X'\), see Figure 2(b). Along the same line, one may readily obtain \(m_{i_1\cdots i_M}(\rho )\) for multiple measurements, and there exists the following observation:
Observation 1
If A cannot steer B in a bipartite system, then there exists the QMS representation \(m_{i_1\cdots i_M}(\rho )\) of the quantum state for arbitrary measurements \(X^{(1)},\cdots , X^{(M)}\) on A, and vice versa.
The validity of this Observation is demonstrated in the Supplement Material B. It is also straightforward to formulate the same Observation for the case that B cannot steer A. Following we apply the QMS to the quantum steering to show its performance in characterizing the quantum nonlocality.

The Bell locality and non-steering are distinguished by magic squares. The circled nodes in upper and lower surfaces stand for \(\vec {m}_{ii'}(y)\) and \(\vec {m}_{ii'}(y')\) of observing Y and \(Y'\) respectively. (a) In Bell locality, \(\vec {m}_{ii'}(y)\) and \(\vec {m}_{ii'}(y')\) are independent distribution vectors; (b) If A can not steer B, \(\vec {m}_{ii'}(y)\) and \(\vec {m}_{ii'}(y')\) are subject to uncertainty relations
3 Quantum steering shown in QMS
In the framework of QMS, the difference between Bell locality and non-steering is demonstrated in Fig. 3, where without loss of generality we take the bipartite qubit system as an example. For Bell local states, the QMS of equation (4) gives
where \(\vec {m}_{ii'}(y)\) and \(\vec {m}_{ii'}(y')\) are two independent distributions because \(q_j^{(\lambda )}(y)\) and \(q^{(\lambda )}_{j'}(y')\) in equation (4) are independent normalized distributions for all \(\lambda \), see Figure 3a. On the contrary, for non-steerable states from A to B, the QMS representation of \(m_{ii'}(\rho )\) in equation (8) can be normalized to a density matrix \(\rho _{ii'} = m_{ii'}(\rho )/\varepsilon _{ii'}\) with \(\varepsilon _{ii'} = \mathrm {Tr}[m_{ii}(\rho )]\). Two distributions \(\vec {m}_{ii'}(y)\) and \(\vec {m}_{ii'}(y')\) would be obtained if we perform two measurements Y and \(Y'\) on B, i.e.
Here \(\vec {q}_{ii'}(y)\) and \(\vec {q}_{ii'}(y')\) are distributions of measuring Y and \(Y'\) on the quantum state of \(\rho _{ii'}\). For arbitrary quantum state, there exists the following majorization uncertainty relation for two observables Y and \(Y'\) [18]
where \(\vec {q}_{ii'}(\cdot )\) is the probability distribution of the corresponding measurement outcome of Y or \(Y'\), and \(\vec {s}\) is a vector depend only on the observables. The majorization in mathematics defines a partial order over vectors of real numbers, for instance majorization relation of two N-dimensional vectors \(\vec {a} \prec \vec {b}\) means that \(\sum _{i=1}^k a^{\downarrow }_{i} \le \sum _{j=1}^k b^{\downarrow }_j\), \(\forall k\in \{1,\cdots , N\}\), with equality satisfied when \(k=N\). The superscript \(\downarrow \) indicates that the components of the vector are rearranged in descending order. Multiplying \(\varepsilon _{ii'}\) on both sides of the uncertainty relation (12), we then have the following constraint on the distributions in equation (11):
Here, \(\sum _{i'} \vec {m}_{ii'}(y) =\vec {m}_i(y)\) and \(\sum _{i} \vec {m}_{ii'}(y) =\vec {m}'_{i'}(y)\), see Fig. 3b. Given the conditional majorized marginal distributions defined on \(\vec {m}_{ii'}\) [20]
for M different measurements \(X^{(i)}\) on A in an \(N\times N\) bipartite system we then have:
Theorem 1
If A cannot steer B, the conditional majorization uncertainty relation
should be satisfied. Here \(\vec {q}(y^{(i)}|x^{(i)})\) is defined in (14) and \(\vec {s}\) is the least upper bound of the direct sum majorization uncertainty relation which depends only on the observables \(Y^{(1)}, \cdots , Y^{(M)}\).
The demonstration of the Theorem 1 is presented in the Supplemental Material C. To illustrate and verify its effectiveness, we apply it to the Werner and isotropic states.
Two-dimensional Werner and isotropic states are equivalent, and may be represented in the following form
where \(\eta \) is a parameter of relative weight and \(|\psi ^-_{12}\rangle = \frac{1}{\sqrt{2}} (|12\rangle - |21\rangle )\). For joint measurements of \(X,X'\) on A and \(Y,Y'\) on B with \(X= Y= \sigma _x\) and \(X' =Y'= \sigma _y\), Theorem 1 predicts that if A cannot steer B then \(\eta \le \sqrt{2}/2\), as explained in Supplemental Material C.1. For infinite number of measurements in the Bloch vector plane of \(\sigma _x\) and \(\sigma _y\), we have \(\eta \le 2/\pi \) in case A cannot steer B, as shown in Supplemental Material C.3. For the mutually unbiased bases (MUB) \(\sigma _x\), \(\sigma _y\), and \(\sigma _z\) on both sides, if A cannot steer B we then have \(\eta \le 1/\sqrt{3}\), see the Supplemental Material C.2. For infinite number of measurements in the three-dimensional Bloch space of SU(2), if A cannot steer B Theorem 1 gives \(\eta \le 1/2\). For more explanations please refer to Supplemental Material C.3. It is worth mentioning here, that the above results are optimal ones up to date.
The three-dimensional Werner and isotropic states may be parameterized as
Here \(|\psi ^-_{ij}\rangle = \frac{1}{\sqrt{2}}(|ij\rangle -|ji\rangle )\) and \(|\psi ^+\rangle = \frac{1}{\sqrt{3}} \sum _{i=1}^3 |ii\rangle \). The degrees of freedom of \(3\times 3\) observables are equal to the generator number of SU(3), which is larger than the number of MUB measurement in 3-dimension Hilbert space. For isotropic state, the latest research based on the general entropic uncertainty relations predicts the steering inequality \(\eta > 0.5\) [22]. However from QMS, we know that the steerability will exhibits at \(\eta > \frac{3\sqrt{5}+1}{16} \sim 0.4818\). The different performance of QMS in witnessing the steerability for Werner and isotropic states may be explained by a recent research: In large dimensions, the Werner states are mostly non-steerable while the isotropic states are mostly steerably entangled [23]. Results of the steerability for two- and three-dimensional Werner and isotropic states are summarized in Table 1.
The results in Table 1 indicate that the nonlocal character of steerability is dominated mainly by the degrees of freedom of the measured observables, rather simply the number of observables.
4 The separability shown in QMS
By definition, a state \(\rho _{AB}\) is separable if and only if it can be decomposed as
with unknown normalized weights \(\kappa _{\lambda }> 0\). Here \(\rho ^{(\lambda )}\) and \(\sigma ^{(\lambda )}\) are density matrices. For measurements X and \(X'\) on A and Y and \(Y'\) on B, the QMS description goes as
Here the tildes are employed to denote the distribution vectors satisfying the uncertainty relations [18]
It is interesting to compare the difference between the two-way non-steering state and the separable state. The former in QMS scheme writes
where \(\xi ^{(i)}_{\lambda }\) are normalized weights and the tilde terms, with subscripts in brackets, are constrained by the uncertainty relation. The difference between separability and two-way non-steering shows up in the difference between equations (22, 23) and (20). For separable state, two uncertainty relations of (21) for \(m_{(ii')(jj')}^{(\lambda )}\) should be both satisfied, whereas for the two-way non-steering states, one uncertainty relation for either \(m_{ii'(jj')}^{(\lambda )}\) or \(m_{(ii')jj'}^{(\lambda )}\) satisfied is enough.
5 Summary
In this work we proposed a QMS model to characterize the nonlocality in form of high dimensional probability tensor, whose marginals give the desired joint measurements distributions of the quantum state. For different nonlocal phenomena the tensor exhibits different inner structures, by which the QMS may help us to discriminate the tangible quantum effects. In this approach, the uncertainty relations in between the tensor components distinguish the non-steering state from the Bell local state. The difference between separable state and non-steering state lies in having more constraints on the tensor components in form of uncertainty relation. Taking Werner and isotropic states as examples, new steering criterion applicable to infinite number of observables is obtained.
In the detection of nonlocality, a pivotal advantage the QMS model has is that it exploits the individual components of the distribution tensor in the form of direct sum majorization uncertainty relation. Whereas for scalar function based criteria, that is in form of variance or entropy, the nonlocality of quantum system might have already been smeared in the course of evaluating scalar functions before enforcing nonlocal constraints. In this sense, the QMS sets up an alternative but finer framework for the study of quantum nonlocalities, including separability, non-separability, two/one-way non-steering, steering, Bell locality, and Bell non-locality, etc.
References
Horodecki, R., Horodecki, P., Horodecki, M., Horodecki, K.: Quantum entanglement. Rev. Mod. Phys. 81, 865–942 (2009)
Einstein, A., Podolsky, B., Rosen, N.: Can quantum-mechanical description of physical reality be considered complete? Phys. Rev. 47, 777–780 (1935)
Schrödinger, E.: Discussion of probability relations between separated systems. Proc. Camb. Philosophical Soc. 31, 555–563 (1935)
Bell, J.S.: On the Einstein-Podolsky-Rosen paradox. Physics 1, 195–200 (1964)
Wiseman, H.M., Jones, S.J., Doherty, A.C.: Steering, entanglement, nonlocality, and the Einstein-Podolsky-Rosen paradox. Phys. Rev. Lett. 98, 140402 (2007)
Clauser, J. F., Horne, M. A., Shimony, A., Holt, R. A.: Proposed experiment to test local hidden-variable theories, Phys. Rev. Lett. 23, 880-884 (1969); Erratum Phys. Rev. Lett. 24, 549 (1970)
Collins, D., Gisin, N., Linden, N., Massar, S., Popescu, S.: Bell inequalities for arbitrary high-dimensional systems. Phys. Rev. Lett. 88, 040404 (2002)
Uola, R., Costa, A.C.S., Nguyen, H.C., Gühne, O.: Quantum steering. Rev. Mod. Phys. 92, 15001 (2020)
Li, Jun-Li, Qiao, Cong-Feng: A necessary and sufficient criterion for the separability of quantum state. Sci. Rep. 8, 1442 (2018)
Terhal, B.M.: Bell inequalities and the separability criterion. Phys. Lett. A 271, 319–326 (2000)
Cavalcanti, E.G., Foster, C.J., Fuwa, M., Wisema, H.M.: Analog of the Clauser-Horne-Shimony-Holt inequality for steering. J. Opt. Soc. Am. B 32, A74–A81 (2015)
Hofmann, H.F., Takeuchi, S.: Violation of local uncertainty relations as a signature of entanglement. Phys. Rev. A 68, 032103 (2003)
Cavalcanti, E.G., Jones, S.J., Wiseman, H.M., Reid, M.D.: Experimental criteria for steering and the Einstein-Podolsky-Rosen paradox. Phys. Rev. A 80, 032112 (2009)
Gühne, O., Hyllus, P., Gittsovich, O., Eisert, J.: Covariance matrices and the separability problem. Phys. Rev. Lett. 99, 130504 (2007)
Kogias, I., Skrzypczyk, P., Cavalcanti, D., Acín, A., Adesso, G.: Hierarchy of steering criteria based on moments for all bipartite quantum systems. Phys. Rev. Lett. 115, 210401 (2015)
Costa, A.C.S., Uola, R., Gühne, O.: Entropic steering criteria: applications to bipartite and tripartite systems. Entropy 2, 763 (2018)
Coles, P.J., Berta, M., Tomamichel, M., Wehner, S.: Entropic uncertainty relations and their applications. Rev. Mod. Phys. 89, 015002 (2017)
Li, Jun-Li, Qiao, Cong-Feng: The optimal uncertainty relation. Ann. Phys. 531, 1900143 (2019)
Fine, A.: Hidden variables, joint probability, and the Bell inequalities. Phys. Rev. Lett. 48, 291–295 (1982)
Li, Jun-Li, Qiao, Cong-Feng: An optimal measurement strategy to beat the quantum uncertainty in correlated system. Adv. Quantum Technol. 3, 2000039 (2020)
Pusey, M.F.: Negativity and steering: a stronger Peres conjecture. Phys. Rev. A 88, 032313 (2013)
Costa, A.C.S., Uola, R., Gühne, O.: Steering criteria from general entropic uncertainty relations. Phys. Rev. A 98, 050104(R) (2018)
Yang, Ma-Cheng, Li, Jun-Li, Qiao, Cong-Feng: The decomposition of Werner and isotropic states, arXiv: 2003.00694
Acknowledgements
This work was supported in part by the Strategic Priority Research Program of the Chinese Academy of Sciences, Grant No.XDB23030100; and by the National Natural Science Foundation of China(NSFC) under the Grants 11975236 and 11635009.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Li, JL., Qiao, CF. Characterizing quantum nonlocalities per uncertainty relation. Quantum Inf Process 20, 109 (2021). https://doi.org/10.1007/s11128-021-03043-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11128-021-03043-x