
Abstract
We formulate uncertainty relations for arbitrary finite number of incompatible observables. Based on the sum of variances of the observables, both Heisenberg-type and Schrödinger-type uncertainty relations are provided. These new lower bounds are stronger in most of the cases than the ones derived from some existing inequalities. Detailed examples are presented.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Uncertainty principle is one of the most remarkable features of quantum mechanics. In 1927, Heisenberg [1] introduced the first uncertainty inequality for a pair of canonical observables—position x and momentum p. This inequality can be expressed in terms of standard deviation-based product uncertainty relation,
where the standard deviation of an operator \(\Omega \) is defined by \(\Delta \Omega =\sqrt{\langle \Omega ^{2}\rangle -\langle \Omega \rangle ^{2}}\), \(\hbar \) is the Planck constant, \(\langle \Omega \rangle \) is the mean value the operator \(\Omega \). After that, Robertson [2] generalized the above inequality to any pair of observables A and B, and provided the following uncertainty relation:
where \([A,B]=AB-BA\) is the commutator of A and B. The lower bound of Robertson uncertainty relation (RUR) (1) has an explicit physical meaning. It can be used to capture the noncommutativity of the two observables. A strengthened form of RUR is due to Schrödinger [3], who derived the following Schrödinger uncertainty relation (SUR):
Uncertainty inequalities of the types of (1) and (2) are often referred to as Heisenberg-type and Schrödinger-type uncertainty relations, respectively.
Recently, Maccone and Pati [4] provided two stronger uncertainty relations based on the sum of variances. These uncertainty inequalities are nontrivial whenever the measured state is not a common eigenstate of the two observables. Thus, these new lower bounds of uncertainty relations can capture better the incompatibility of the two observables. After that, Chen and Fei [5] generalized one of the uncertainty relations in Ref. [4] to arbitrary N incompatible observables.
Variance-based uncertainty relations have many useful applications in quantum information theory, such as entanglement detection [6, 7] and quantum spin squeezing (see Ref. [8] and references therein). It is worth noting that there are many other ways to formulate uncertainty relations, such as in terms of entropies [9–14], by use of majorization approach [15–20], based on the skew information [21–23] and the notion of fine-grained uncertainty relation [24–26]. Throughout the paper, we only focus on the variance-based sum uncertainty relations.
In this paper, we provide several new uncertainty relations for arbitrary finite number of incompatible observables. These new lower bounds are shown to be tighter than the ones in the previous works via some examples of spin-\(\frac{1}{2}\) particle system. The paper is organized as follows. In Sect. 2, we present a sum uncertainty relation for n incompatible observables. When \(n=2,3\), the inequality is shown to be stronger than the ones in Ref. [4] and [5] in some cases. In Sect. 3, we derived a product uncertainty relation, each of the factor in which is the sum of uncertainties in the individual incompatible observables. We conclude the paper in Sect. 4.
2 Stronger sum uncertainty relation for n incompatible observables
In this section, we first provide a stronger sum uncertainty relation for n incompatible observables. We have the following Theorem.
Theorem 1
Let \(A_{1},A_{2},\ldots ,A_{n}\) be n incompatible observables and \(\rho \) a quantum state. For each \(A_{i}\), if \(\Delta A_{i}\ne 0\), then we define \(P_{i}=\widetilde{A_{i}}\sqrt{\rho }/\Delta A_{i}\), where \(\widetilde{A_{i}}=A_{i}-\langle A_{i}\rangle I\), I is the identity operator. If \(\Delta A_{i}=0\), we set \(P_{i}\) to be a zero operator. Let M be an \(n\times n\) matrix with entries \(M_{ij}=\mathrm {Tr}(P_{i}^{\dag }P_{j})\). Then, we have
where \(\lambda _{\max }(M)\) denotes the maximal eigenvalue of M.
Proof
We first note that M is a positive semi-definite matrix, since \(\sum _{i,j}x_{i}^{*}M_{ij}x_{j}=\Vert \sum _{i}x_{i}P_{i}\Vert ^{2}\ge 0\), \(\forall (x_{1},\ldots x_{n})\in \mathbb {C}^{n}\). Then we have \(\lambda _{\max }(M)\ge 0\). Taking into account that \(\widetilde{\sum _{i}A_{i}}=\sum _{i}\widetilde{A_{i}}\), we have
If \(\lambda _{\max }(M)=0\), then M is a zero matrix, and all \(\Delta A_{i}=0\), which is contrary to the incompatibility of \(A_{i}s\). Hence, \(\lambda _{\max }(M)>0\), and \(\sum _{i}(\Delta A_{i})^{2}\ge \frac{1}{\lambda _{\max }(M)}\left[ \Delta \left( \sum _{i}A_{i}\right) \right] ^{2}\) holds from the above inequality. \(\square \)
In Ref. [4], the authors derived an uncertainty relation for two observables \(A_{1}\) and \(A_{2}\):
If \(A_{1}\) and \(A_{2}\) are incompatible, then the new bound in (3) is shown to be better than the one in (4), which is given in the following corollary.
Corollary 1
For two incompatible observables \(A_{1}\) and \(A_{2}\), we have
where M is defined in Theorem 1.
Proof
We only need to prove that \(\lambda _{\max }(M)\le 2\). If \(\Delta A_{1}=0\) or \(\Delta A_{2}=0\), then \(\lambda _{\max }(M)=1\). Suppose that \(\Delta A_{1}\ne 0\) and \(\Delta A_{2}\ne 0\). Then, \(\lambda _{\max }(M)=1+|\mathrm {Tr}(P_{1}^{\dag }P_{2})|\). Note that \(\Vert P_{1}\Vert =\Vert P_{2}\Vert =1\), we have \(|\mathrm {Tr}(P_{1}^{\dag }P_{2})|\le 1\) by the Cauchy-Schwarz inequality. Hence, \(\lambda _{\max }(M)\le 2\) and the last inequality in (5) holds. \(\square \)
To see that our new lower bound (3) is strictly greater than the one in (4), consider the standard Pauli matrices \(\sigma _{1}\) and \(\sigma _{3}\). Let the qubit state to be measured and the measured state given by the Bloch vector \(\overrightarrow{r}=\left( \frac{\sqrt{3}}{2}\cos \theta ,\frac{\sqrt{3}}{2}\sin \theta ,0\right) \). Then we have \(\Delta \sigma _{1}=\sqrt{1-\frac{3}{4}\cos ^{2}\theta }\), \(\Delta \sigma _{3}=1\), \(\Delta (\sigma _{1}+\sigma _{3})=\sqrt{2-\frac{3}{4}\cos ^{2}\theta }\), \(\lambda _{\max }(M)=1+\frac{\sqrt{3}|\sin \theta |}{\sqrt{1+3\sin ^{2}\theta }}\). The comparison between the lower bounds (3) and (4) is shown in Fig. 1. Apparently, our new bound is strictly greater than (4).

Recently, Chen and Fei [5] generalize uncertainty relation (4) to the case of arbitrary n incompatible observables, and present the following variance-based sum uncertainty relation:
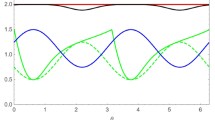
To compare the uncertainty relation (3) with (6), let us consider again the Pauli matrices \(\sigma _{1},\sigma _{2},\sigma _{3}\), and the measured state given by the Bloch vector \(\overrightarrow{r}=(\cos \theta ,0,0),\theta \in (0,\pi )\). Then, we have \((\Delta \sigma _{1})^{2}+(\Delta \sigma _{2})^{2}+(\Delta \sigma _{3})^{2}=3-\cos ^{2}\theta \), \(\Delta (\sigma _{1}+\sigma _{2})=\Delta (\sigma _{1}+\sigma _{3})=\sqrt{2-\cos ^{2}\theta }\), \(\Delta (\sigma _{2}+\sigma _{3})=\sqrt{2}\), \(\Delta (\sigma _{1}+\sigma _{2}+\sigma _{3})=\sqrt{3-\cos ^{2}\theta }\), \(\lambda _{\max }(M)=1+|\cos \theta |\). It is shown in Fig. 2 that for a wide range of \(\theta \), our new uncertainty relation (3) is stronger than (6).

3 Uncertainty relation based on the product of sum of variances in the individual observables
In Ref. [27], the author studied the product of sum of uncertainties in the individual observables. They investigated a special case for a set of noncommuting observables. Using the RUR (1) and the convexity of quantum uncertainty, they formulated the product of sum of uncertainties in \(\{A_{i}\}_{i=1}^{n}\) and \(\{B_{i}\}_{i=1}^{n}\), which satisfy \([A_{i},B_{j}]=\mathrm {i}\delta _{ij}C\), and presented the following uncertainty relation:
Here we generalize the idea to any two sets of incompatible observables. We have the following Schrödinger-type uncertainty relation.
Theorem 2
Let \(\{A_{i}\}_{i=1}^{n}\) and \(\{B_{j}\}_{j=1}^{m}\) be two sets of incompatible observables and \(\rho \) a quantum state. If \(\Delta A_{i}\ne 0\), then we define \(X_{i}=\widetilde{A_{i}}\sqrt{\rho }/\Delta A_{i}\); otherwise, define \(X_{i}=O\); similarly, if \(\Delta B_{j}\ne 0\), we define \(Y_{j}=\widetilde{B_{j}}\sqrt{\rho }/\Delta B_{j}\), otherwise \(Y_{j}=O, \forall i,j\). Let G be an \(n\times m\) matrix with entries \(G_{ij}=|\mathrm {Tr}(X_{i}^{\dag }Y_{j})|\). If there exist \(A_{i},B_{j}\) such that \(\langle \widetilde{A_{i}}\widetilde{B_{j}}\rangle \ne 0\), then we have
where \(\sigma _{\max }(G)\) is the maximal singular value of G.
Proof
We first have
On the other hand,
If \(\sigma _{\max }(G)=0\), then all \(\langle \widetilde{A_{i}}\widetilde{B_{j}}\rangle =0\), which is contrary to our assumption. Taking into account the above formulas, we get (7) directly. \(\square \)
Remark
It is reasonable to assume that not all \(\langle \widetilde{A_{i}}\widetilde{B_{j}}\rangle =0\), since otherwise we have \(\sum _{i}(\Delta A_{i})^{2}\sum _{j}(\Delta B_{j})^{2}\ge \sum _{i,j}|\langle \widetilde{A_{i}}\widetilde{B_{j}}\rangle |^{2}=0\) by SUR (2), which gives rise to a trivial uncertainty relation.
We can also obtain the following Heisenberg-type uncertainty relation from (7).
Corollary 2
Under the conditions of the Theorem 2, we have
Noting that the following uncertainty relation holds by RUR (1),
we need to compare the lower bounds (8) and (9). Let \(A_{1}=\sigma _{3},B_{1}=\sigma _{1},B_{2}=\sigma _{2}\), and the Bloch vector of the measured state \(\overrightarrow{r}=(\frac{1}{2}\cos \theta ,\frac{1}{2}\sin \theta ,0)\). It is shown in Fig. 3 that the uncertainty relation (8) we derived in this paper is stronger in this case than the one trivially obtained by summing over RURs for all pairs of \(A_{i}\) and \(B_{j}\).

Let us consider a special case for \(n=m\) and \(A_{i}=B_{i}\). We have the following uncertainty relation.
Corollary 3
Let \(A_{1},A_{2},\ldots ,A_{n}\) be n incompatible observables. We have
where G is defined in Theorem 2.
Proof
By using RUR (1) and the mean inequality for pairs of observables \(A_{1},\ldots ,A_{n}\), we get
Summing over the above inequalities, we have
We now only need to show that \(\sigma _{\max }(G)<n-1\) for some n, when suitable observables and measured state considered. Let \(n=3\) and \(A_{i}=\sigma _{i}\), \(i=1,2,3\), \(\rho \) is given by the Bloch vector \(\overrightarrow{r}=(\cos \theta ,0,0),\theta \in (0,\pi )\). Then, we have \(\sigma _{\max }(G)=1+|\cos \theta |<2\). This completes the proof. \(\square \)
4 Conclusion
We have formulated uncertainty relations for arbitrary incompatible observables. These new uncertainty inequalities are based on the sum of variances of the observables. The corresponding lower bounds we derived in this paper are shown to be tighter than the previous ones. Thus our bounds capture better the incompatibility of the observables. We have also studied the general form of product of sum of variances in the individual observables and obtained a stronger uncertainty relation. We emphasize that these new bounds are physically realizable in general. These bounds are tight and can be reached by detailed quantum systems, as shown in examples. Moreover, they are also physically measurable. For the uncertainty relation (3), we only need to measure the variance of sum of the observables, and the value of \(\lambda _{\max }(M)\) can be estimated beforehand. Similarly, for the uncertainty relation (7), we need to measure the mean value of each observable and the mean value of commutators and anti-commutators of pairs of the observables. The value of \(\sigma _{\max }(G)\) can be computed readily. More interesting results could be obtained if multipartite systems are taken into account. As uncertainty relations are tightly related to many quantum tasks, our results might shed new lights on investigating quantum information processing like entanglement detection, quantum spin squeezing, quantum separability criteria, and security analysis of quantum key distribution in quantum cryptography and nonlocality.
References
Heisenberg, W.: Über den anschaulichen Inhalt der quantentheoretischen Kinematik und Mechanik. Z. Phys. 43, 172 (1927)
Robertson, H.P.: The uncertainty principle. Phys. Rev. 34, 163 (1929)
Schrödinger, E.: Sitzungsberichte der Preussischen Akademie der Wissenschaften. Physikalisch-mathematische Klasse 14, 296 (1930)
Maccone, L., Pati, A.K.: Stronger uncertainty relations for all incompatible observables. Phys. Rev. Lett. 113, 260401 (2014)
Chen, B., Fei, S.M.: Sum uncertainty relations for arbitrary \(N\) incompatible observables. Scientific Rep. 5, 14238 (2015)
Hofmann, H.F., Takeuchi, S.: Violation of local uncertainty relations as a signature of entanglement. Phys. Rev. A 68, 032103 (2003)
Gühne, O.: Characterizing entanglement via uncertainty relations. Phys. Rev. Lett. 92, 117903 (2004)
Ma, J., Wang, X.G., Sun, C.P., Nori, F.: Quantum spin squeezing. Phys. Rep. 509, 89 (2011)
Deutsch, D.: Uncertainty in quantum measurements. Phys. Rev. Lett. 50, 631 (1983)
Maassen, H., Uffink, J.B.M.: Generalized entropic uncertainty relations. Phys. Rev. Lett. 60, 1103 (1988)
Wehner, S., Winter, A.: Entropic uncertainty relations—a survey. New J. Phys. 12, 025009 (2010)
Wu, S., Yu, S., Mølmer, K.: Entropic uncertainty relation for mutually unbiased bases. Phys. Rev. A 79, 022104 (2009)
Rastegin, A.E.: Uncertainty relations for MUBs and SIC-POVMs in terms of generalized entropies. Eur. Phys. J. D 67, 269 (2013)
Chen, B., Fei, S.M.: Uncertainty relations based on mutually unbiased measurements. Quantum Inf. Process. 14, 2227 (2015)
Bialynicki-Birula, I., Rudnicki, L.: Entropic Uncertainty Relations in Quantum Physics. In: Sen, K.D. (ed.) Statistical Complexity. Springer, Berlin (2011)
Puchala, Z., Rudnicki, L., Zyczkowski, K.: Majorization entropic uncertainty relations. J. Phys. A: Math. Theor. 46, 272002 (2013)
Rudnicki, L., Puchala, Z., Zyczkowski, K.: Strong majorization entropic uncertainty relations. Phys. Rev. A 89, 052115 (2014)
Rudnicki, L.: Majorization approach to entropic uncertainty relations for coarse-grained observables. Phys. Rev. A 91, 032123 (2015)
Friedland, S., Gheorghiu, V., Gour, G.: Universal Uncertainty Relations. Phys. Rev. Lett. 111, 230401 (2013)
Narasimhachar, V., Poostindouz, A., Gour, G.: The principle behind the Uncertainty Principle. arXiv:1505.02223
Luo, S.: Heisenberg uncertainty relation for mixed states. Phys. Rev. A 72, 042110 (2005)
Furuichi, S.: Schrödinger uncertainty relation with Wigner-Yanase skew information. Phys. Rev. A 82, 034101 (2010)
Li, Q., Cao, H.X., Du, H.K.: A generalization of Schrödinger’s uncertainty relation described by the Wigner-Yanase skew information. Quantum. Inf. Process. 14, 1513 (2015)
Oppenheim, J., Wehner, S.: The uncertainty principle determines the nonlocality of quantum mechanics. Science 330, 1072 (2010)
Ren, L. H., Fan, H.: The fine-grained uncertainty relation for mutually unbaised bases. (2013) arXiv:1312.6744
Rastegin, A.E.: Fine-grained uncertainty relations for several quantum measurements. Quantum Inf. Process. 14, 783 (2015)
Pati, A.K., Sahu, P.K.: Sum uncertainty relation in quantum theory. Phys. Lett. A 367, 177 (2007)
Acknowledgments
This work is supported by the National Basic Research Program of China (2015CB921002) and the National Natural Science Foundation of China Grant Nos. 11175094, 91221205 and 11275131.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, B., Cao, NP., Fei, SM. et al. Variance-based uncertainty relations for incompatible observables. Quantum Inf Process 15, 3909–3917 (2016). https://doi.org/10.1007/s11128-016-1365-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11128-016-1365-1