
Abstract
An essential part of the wild blueberry cropping system is the proper management of agrochemical inputs including herbicides, fungicides and insecticides. A machine vision system was developed and mounted on the rear sprayer boom 0.18 m in front of the sprayer nozzles capable of targeting the agrochemical application on an as-needed basis. The three-point hitch mounted sprayer featured 27 nozzles over a 13.7 m boom width and a storage tank capacity of 1135 l. Nine digital color cameras continually take images in real-time while computer software processes the images in 0.15 s to determine the target locations where the nozzles open and spray at speeds up to 1.77 m s−1. Two wild blueberry fields in central Nova Scotia were selected for smart sprayer performance testing with spot-application (SA) of agrochemical as compared to control and uniform application techniques. Chateau® herbicide was applied in a field with an infestation of hair cap moss. Spray droplet comparison showed moss patches were properly targeted using the smart sprayer. SA provided the same coverage performance as compared to uniform on the moss targets with herbicide application savings of 78.5% using the smart sprayer. Harvestable yield results were similar for all application tracks. TruPhos Magnesium and ZincMax foliar fertilizers were tank mixed with Bravo® and Proline® fungicides and applied to compare the difference of SA, control and uniform application. Results showed SA of foliar fertilizer and fungicide led to less premature leaf drop and increased the blueberry stem height, number of branches, stem diameter and fruit buds. SA of foliar fertilizer and fungicide also increased the percent of healthy wild blueberry plants by 57.8% and the harvestable yield by 137.8%. Fungicide application savings using the smart sprayer for SA were 11.6%.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Pesticides are important for agricultural crops to control weeds, disease and pests within the field. Pesticides are heavily applied to Canadian farmland each year with approximately 6 billion kg being applied worldwide in 2006 (Carvalho 2006). Typically, farmers apply these pesticides uniformly without considering the substantial field crop/weed variation that exists on many farms. The overuse of pesticides increases the cost of production and pollutes the environment (Pimentel and Lehman 1993). Spot-application (SA) of pesticides is a valuable method to reduce input use while maintaining weed, disease and pest control within agricultural fields. Wild blueberry producers can benefit from SA technology because of the substantial soil, blueberry plant and weed variability within the fields.
Wild blueberries are a naturally occurring crop developed from deforested wood land and are native to northeastern regions of North America (Eaton 1988). Bare spots within the wild blueberry fields require different pesticide treatments as compared to the blueberry plant areas. Newly developing wild blueberry fields can have significant (up to 50%) bare spot coverage (Zaman et al. 2008). Weeds and grass species exist in most of all commercial wild blueberry fields. These weeds and grasses should be treated on a spot-specific basis to ensure pesticides are not being wasted in non-target areas that exist within the fields. A smart sprayer that is able to target weed, grass or diseased areas within the field and turn on/off the nozzles would be an important asset for the future success of the wild blueberry industry. A smart sprayer using an automated machine vision system would allow farmers to apply the pesticides to target areas in the field while saving in areas that do not require treatment. The result can save time, money and cause less pollution to the environment.
Steward and Tian (1998) were some of the first researchers to develop a real-time machine vision weed-sensor for use for SA. Pajares et al. (2016) developed a guide for selection of agricultural machine vision systems for optimum performance, considering adverse outdoor environments with high variability in the illumination, irregular terrain conditions or different plant growth stages. Hijazi et al. (2012) used a high-speed imaging system for agrochemical spraying and fertilizer applications but more work was needed to fully characterize the displacement of pesticide droplets and fertilizer grains in real field conditions. Sabzi et al. (2017) developed a machine vision system using a hybrid artificial neural network for automatic segmentation of plants under different lighting conditions and it was claimed to be applicable for all field applications with high accuracy and speed. However, testing did not involve mixed canopy conditions that are common in many fields. Burgos-Artizzu et al. (2010) developed a prototype machine vision system using a 1 mega-pixel camera to target weeds growing between corn rows with an image processing accuracy of 69.4%. Researchers mentioned plans to improve the machine vision image processing algorithms and to build a sprayer control system to be used for SA of herbicide. Pérez-Ruiz et al. (2015) highlighted a 96.65% herbicide savings with weed infestation of 3.24% in winter wheat using a custom developed autonomous tractor and machine vision system fitted to a direct-injection variable rate sprayer. The study proved that a real-time kinematics (RTK) global positioning system (GPS) was accurate (< 0.015 m) for precise maneuvering of the variable rate sprayer and would be the future of safe, site-specific and efficient control of weeds, pathogens and insects in agricultural crops and forestry. Gonzalez-de-Santos (2016) used hex-rotor UAVs to carry a two-camera sensing system to perform remote detection of weed patches on narrow-row crops. The authors then deployed an autonomous tractor and patch sprayer to spray the field using a prescription map. Piron et al. (2011) used a stereoscope to develop a 3D image to differentiate between carrot plants and weed growing within rows at early growth stage. Classification accuracy ranged from 66% to 83% with the major drawback being the requirement of height difference between crop and weeds for proper sorting. Arima et al. (2003) developed a self-propelled sprayer to reduce the amount of chemicals applied to strawberry plants by using two direct lights for illumination of 5 charge coupled device (CCD) cameras for detection and spot-spraying of diseased plants. The robot’s vision system was also used for strawberry fruit quality grading, traceability and harvesting. O’Neall and Sandford (1993) invented a herbicide spraying system using optical sensors; however, it was limited to row crops with weed infestations that grew taller than the non-target plants. McCarthy et al. (2010) reviewed the three-main commercial machine vision-based weed spot-spraying technologies available for application in sugarcane crops and found they were restricted to detecting weeds on a soil background only and would not work to detect weeds growing amongst the sugarcane. They suggested machine vision technology is needed that enables leaf color, shape and texture to differentiate between sugarcane and weed species. They concluded that weed detection algorithms require consideration of shape, spectral and/or texture properties of vegetation to achieve robust species discrimination in a scene containing adjacent weeds and sugarcane crop. Moller (2010) concluded that applying computer vision technology to agricultural operations lowers operator stress levels.
Esau et al. (2014) developed a variable rate sprayer for SA requiring a separate boom in front of the tractor (6.6 m in front of spray nozzles) for machine vision cameras. The front mounted boom required additional cost and attention by the operator to prevent it from coming in contact with rocks, trees or other obstacles. A similar front mounted machine vision system was retrofitted from the sprayer and added to a modified pneumatic spreader to apply SA of fertilizer to wild blueberry plants in real-time (Chattha et al., 2015). The present study was undertaken to test the performance of an improved smart sprayer design with a custom-built I/O relay box and machine vision mounted on the rear sprayer boom just ahead of the nozzles (0.18 m) with a standard spacing nozzle of 0.51 m for SA of herbicide and fungicide in wild blueberry fields.
Materials and methods
Development of a smart sprayer for spot-application of agrochemical
A smart sprayer featuring rear mounted machine vision was developed consisting of nine digital color cameras (UI-1220SE/C, IDS Imaging Development System Inc., Woburn, MA, USA) connected to a 2.7 GHz Intel® Core™ i7 central processing unit and 8.0-gigabyte random access memory fan-less commercial computer (SP675HP, Unicomp Laboratories, Inc., Brentwood, NY, USA) installed with 64-bit Windows 7 operating system (Microsoft Corp, Redmond, WA, USA) via 12.2 m long USB 2.0 active link extension cables (Sabrent CB-USBXT, Miami, FL, USA) (Fig. 1). The computer was powered by a 200 W, 12-V direct current to 120-V alternating current Eliminator™ inverter (Motomaster Inc., Watford, UK) through a cigarette lighter receptacle inside the cab of the tractor. Image processing software specifically designed for applications in wild blueberry fields processed each image and sent triggering information to a 12-V relay switch box that powered the appropriate solenoid valve opening the spray nozzles in the specific section that the target was initially identified. Vehicle travel speed was obtained from a Garmin® GPS 18× receiver (Garmin International Inc., Olathe, KS, USA) that was connected to the computer through a RS232 communication cable. An on-board flow regulating system allowed the line pressure to stay constant while turning on/off different combinations of nozzles.

Smart sprayer showing camera field of view for image acquisition
A John Deere 6430 (Deere & Company, Moline, IL, USA) 89.5 kW farm tractor and MS 1135E sprayer (MS Spray Inc., Drummondville, Quebec, Canada) was modified using a combination of hardware and software to operate on a spot-specific basis using the developed machine vision system (Fig. 1). The main components added included nine µEye digital color cameras, a solenoid valve relay switch box, a Midtech legacy flow controller (Midwest Technologies, Springfield, IL, USA), three Midtech servo valves, three Midtech flow meters and model 2201A solenoid valves (Delware Pump and Parts Limited, Delware, ON, Canada) for each nozzle. The cameras were mounted on the rear sprayer boom 0.18 m ahead of the hypro lo-drift™ spray nozzles (LU-DB02F120, Hypro, New Brighton, MN, USA). The cameras were connected to the computer in the tractor cabin by active link USB cables because of the extended 10 m length. A custom image acquisition program was developed using C++ programming language (Microsoft Corp, Redmond, WA, USA) for a 64-bit Windows 7 operating system. The graphical user interface (GUI) continuously acquires and displays the images from the nine µEye cameras in real-time. Custom imbedded image processing software (described below) was capable of discriminating the difference between blueberry plants, weed patches and bare soil and was installed on the computer. As the sprayer moves in the field, the image processing software analyzes each image and sends triggering information to the corresponding solenoid valve opening and closing the individual spray nozzles on a spot-specific basis. The computer also continuously sends triggering information to the Midtech legacy controller which regulates the flow rate based on the number of nozzles open at that time and the vehicle travelling speed. The sprayer boom was positioned approximately 1.2 m off the ground and each of the sprayer nozzles covered a 0.51 m section on the ground surface. The feed line from the sprayer pump separated into three lines, each line feeding a flow valve, flow meter and inline 50-micron particle filter. The three lines were then each connected to nine solenoid valves on to which a nozzle was fitted directly. A Comet BP125 3 piston diaphragm pump (Comet Industrial Pumps, Burnsville, MN, USA) was used to pressurize the system and operated using the tractor power take off.
Image processing
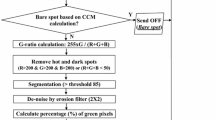
Image processing algorithms were developed and tested primarily for use with a specific agrochemical application suited for the wild blueberry industry. During spring and fall herbicide applications, weeds can typically be targeted using the color contrast between the green target weeds and the reddish-brown background wild blueberry plants and soil surface (Fig. 2). The program acquired a 752 × 128 pixel image (24-bit red-green-blue (RGB)) corresponding to 1.52 × 0.28 m area of interest from each of the nine cameras and processed the image to discriminate emerged green foliage (Fig. 3). Two interrupt routines (GPS reading and 50 ms timer) were built into the program to acquire the images from the cameras and transfer them onto the computer for processing. Co-ordinates from the previous and the current GPS output were converted to decimal degrees and used to automatically estimate timing for the next image acquisition. The RGB relationship used was (G × 255)/(R + G + B). The threshold value (> 80) was used for segmentation based on the results of the image analysis and simulation (Fig. 2). This value converted the apparent green pixels to white pixels and the remaining pixels to black pixels in the resulting binary images (Fig. 2). Small clusters of pixels in the image were incorrectly identified as green due to specular reflection, but these were removed by applying a 2 × 2 erosion filter. If the number of white pixels in the field of view of a sub-image was greater than 80 (derived from simulation), an ON signal is sent to the corresponding channel of the solenoid valve relay switch box for agrochemical delivery (Fig. 2). Further details of the sensing system using digital photography technique can be found in Chang et al. (2014). During in-season herbicide and fungicide applications, texture analysis is required to help differentiate between the wild blueberry plants and weed species that are typically similar in color. A touch screen interface (1200TS, Xenarc Technologies, Irvine, CA, USA) mounted in the tractor cabin allowed users the ability to shut all nozzles off with the press of a single button (Fig. 2). A second set of buttons allowed the user to further adjust the sprayer boom with three sections of control (nine spray nozzles per section for a total of 27 spray nozzles). The control settings are either off (nozzles are not spraying), on (nozzles are on and spraying uniformly) or auto (nozzles are controlled based on feedback from the machine vision system). The touchscreen interface uses two buttons to control the foam marker on/off and left/right used to assist the operator with guidance while spraying. The user has the ability to change the green pixel threshold based on the specific application being applied to enable the sprayer to be more or less sensitive to targets in the field. The interface also shows in real-time, the images that are being processed (Fig. 2).

Smart sprayer touch screen user-interface showing camera field of view and controls for SA of agrochemical

Custom developed camera enclosure and mounting arm attached to rear sprayer boom for image acquisition
Nine µEye cameras were equally spaced at 1.52 m apart and each covers the area for control of three spray nozzles. The cameras were positioned on the sprayer boom to maintain a height of 1.2 m off the ground surface to enable the images from each camera to cover the complete boom width without over- or under- lapping (Fig. 3).
The camera lenses (LM4NCL, Kowa Optimed Inc., Torrance, CA, USA) had 3.5 mm focal length with a fixed aperture (f/4.0) with infinity focus). Exposure time and digital gain were automatically controlled by auto exposure shutter/auto gain control to adjust for variable outdoor lighting conditions. The maximum auto exposure shutter was set to 2 ms to prevent picture blurring while travelling over rough field terrain. The cameras were positioned 0.18 m in front of the spray nozzles (Fig. 4). Each image represents an area on the ground surface equal to 1.52 m wide by 0.914 m long. For rapid image processing, only the front portion (1.52 m by 0.28 m) of the image was used and the remainder disregarded (Fig. 4).

Schematic diagram showing camera field of view in relation to sprayer boom and nozzle position
The image acquisition time was found to be 0.015 s. The processing time required for the computer to analyze the nine images simultaneously was 0.135 s. An additional 0.052 s time delay was required for the computer to send a triggering signal to turn on the solenoid valve and spray (Table 1). The maximum travel speed while spraying was 1.77 m s−1 and was found using the following formula:
Field Experiment 1
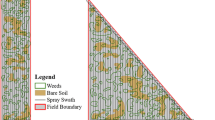
The East Mines Field in Debert, Nova Scotia (45.426956°, −63.482069°) was selected to apply an application of Chateau® (Valent Canada, Guelph, Ontario, Canada) herbicide on a target infestation of hair cap moss that was present in the field. A RTK-GPS HiPer® lite+ (Topcon Positioning Systems Inc., Livermore, CA, USA) was used to manually map the field boundary and moss infected areas in the field (Fig. 5). The total field size was 3.68 ha and 12 tracks each 120 m long were marked with flags (Fig. 5). The 12 test tracks were broken into four replications of three different application techniques [control (CN)—0.0 kg ha−1 Chateau®, uniform application (UA)—0.6 kg ha−1 Chateau® and (SA)—0.6 kg ha−1 Chateau® applied only to target moss areas]. Figure 5 shows both a GIS map representing the moss infected areas and an aerial photograph of the East Mines Field with 12 test tracks.

East Mines Field GIS map showing moss infected areas on November 8, 2013 (top) and aerial photograph (bottom) showing experimental track setup
On November 8, 2013 the smart sprayer was used to apply the treatment application to each test track. The temperature during the time of application was 2.9 °C with a relative humidity of 57%. The average wind speed was 3.1 m s−1 directed to the East (Environmental Canada Weather Archive). Prior to application, six TeeJet® 52 × 76 mm water sensitive papers: (Spraying Systems Co., Wheaton, IL, USA) were placed horizontally at ground level in moss infected areas of SA track three while six water sensitive papers were placed in wild blueberry areas within the same test track. For comparison, six water sensitive papers were also placed in UA track two. The water sensitive papers were collected after the smart sprayer completed spraying on the pass across the test tracks and they were dried and placed in a sealed zip lock bag and brought back to the Dalhousie University Agricultural Campus (DAL-AC) lab. The water sensitive papers were each scanned and converted into a bmp image. Each of the bmp image files were imported into custom developed software that was able to determine the percent area coverage of spray droplets. The software was used to enhance and count the blue pixels on each water sensitive paper, and expressing the result as a percentage of total blue pixels. Analysis of variance (ANOVA) with least significant means was performed to examine the percent area coverage of the sprayed targets at different locations (blueberry plant zone, moss infected zone) within the test tracks. The minimum, maximum, mean and standard deviation (SD) of the percent area coverage targets for all applications were determined using Minitab® 16 statistical software (Minitab® Inc., State College, PA, USA).
The ground speed during the field application was 1.7 ± 0.06 m s−1 representing a typical travel speed for wild blueberry field applications. The herbicide application rate was setup at 0.6 kg ha−1 Chateau® with a total flow volume of 187.1 l ha−1. The total amount of agrochemical was recorded from the display screen on the Midtech legacy controller after completion of each track. The agrochemical application amounts were used in combination with the percent moss coverage to determine the amount of agrochemical savings that was achieved from each test track.
The wild blueberry yield was manually collected on August 20, 2015 using a 36-tooth hand rake from ten randomly selected sampling plots in each track (SA, UA and CN) to assess the effect of Chateau® on harvestable yield. A steel quadrant measuring 0.5 m × 0.5 m was used to mark out the area for the yield collection from each plot. The collected yield samples were packaged in a sealed plastic bag and weighed at the DAL-AC lab. ANOVA was used to examine the difference between the mean yield weight from each test track (SA, UA and CN).
Percent moss coverage was recorded from a 0.5 × 0.5 m steel frame quadrant at ten randomly selected points in each test track. Each location was marked with a plastic marker stake so the procedure could be repeated at the same location at different times throughout the year. A 16-megapixel Fijifilm finePix HS30EXR (Fujifilm, Mississauga, ON, Canada) digital color camera was pointed downward at a height of 1.0 m above the ground to record a digital image of each plot for comparison. The data was collected on November 15, 2013, January 15, 2014, May 8, 2014, July 2, 2014 and May 25, 2015 (Fig. 6). Percent moss coverage from each plot was analyzed using SAS® (SAS Institute Inc., Cary, NC, USA). The data was checked for normality and constant variance. The minimum, maximum, mean and SD of the percent moss coverage for all applications were determined using Minitab®. The mixed-model procedure at 5% level of significance was used to test the significance of the treatments. Least significant means comparison was used to determine if the percent moss coverage varied with the treatment methods or over time.

Sample images showing moss percent area coverage at different collection intervals for each of the three application techniques. White marker stakes were positioned at the center of each plot
Field Experiment 2
The Middle Road Field in Debert, Nova Scotia (45.425706°, −63.497650°) was selected to apply an application of chlorothalonil (Bravo®) and prothioconazole (Proline®) fungicide to protect the plants from disease that may reduce yield in the field. TruPhos Magnesium (29% phosphoric acid, 5% soluble potash and 4% magnesium) and ZincMax (10.2% zinc and 0.5% boron) foliar fertilizers were also tank mixed with Bravo® and Proline® fungicides to increase the plant nutrient supply with the hope of increasing yield. An RTK-GPS was used to manually map the field boundary and bare soil areas in the field. The total field size was 5.26 ha and nine tracks each 75 m long were marked with flags. The nine test tracks were broken into three replications of three different application techniques [(CN—0.00 l ha−1 Bravo®/Proline®/TruPhos Magnesium/ZincMax), (UA—4.94 l ha−1 Bravo®, 0.35 l ha−1 Proline®, 3.71 l ha−1 TruPhos Magnesium and 1.24 l ha−1 ZincMax), (SA—4.94 l ha−1 Bravo®, 0.35 l ha−1 Proline®, 3.71 l ha−1 TruPhos Magnesium and 1.24 l ha−1 ZincMax applied only to foliage areas)]. On July 21, 2014 the smart sprayer was used to apply the treatment application to each test track. The temperature during the time of application was 25.5 °C with a relative humidity of 47%. The average wind speed was 2.8 m s−1 directed to the North (Environmental Canada Weather Archive). A mixing station was used to properly blend the two fungicide and two liquid foliar fertilizer combinations together.
The ground speed during the field application was 1.7 ± 0.06 m s−1. The fungicide application rate was set to 4.94 l ha−1 Bravo®, 0.35 l ha−1 Proline®, 3.71 l ha−1 TruPhos Magnesium and 1.24 l ha−1 ZincMax with a total flow volume of 187.1 l ha−1. The total amount of agrochemical was recorded from the display screen on the Midtech legacy controller after completion of each track. The agrochemical application amounts were used in combination with the percent bare soil coverage to determine the amount of agrochemical savings that was achieved from each test track. Ten randomly selected locations within each track were marked using a field stake and recorded position using the RTK-GPS for use for plant parameter data collection.
On October 9, 2014 a 16-megapixel Fujifilm finePix HS30EXR digital color camera was used to visually record the effect of the fungicide and foliar fertilizers on plant growth and leaf retention. The camera was pointed downward at a height of 1.0 m above the ground to capture a digital image from each of the ten plots within each track. A steel frame measuring 0.5 × 0.5 m was placed on the ground beforehand to identify the area where the image was to be taken. The 90 images were randomly numbered and saved on a USB flash drive. Five different classes were developed based on plant leaf retention [(0—complete leaf defoliation, 1—partial leaf defoliation, 2—no leaf defoliation (mostly red plants), 3—no leaf defoliation (red/green plants) and 4—no leaf defoliation (mostly green plants)] (Fig. 7). The images were given to five people who separated each of the images into one of the five classes based on visual observation. The results were averaged and converted to a percentage of healthy plants per image. Plant health data from each plot was analyzed using SAS®. The data were checked for normality and constant variance. The minimum, maximum, mean and SD of the percent of healthy plants for all applications were determined using Minitab®. The mixed-model procedure at 5% level of significance was used to test the significance of the treatments. Least significant means comparison was used to determine if the leaf retention varied with the treatment methods (SA, UA and CN).

Wild blueberry plant visual leaf retention chart used to rank the digital images taken of the plots from each track
On December 22, 2014, plant growth parameters were measured from the ten plots within each of the nine tracks to assess the effect of the fungicide and foliar fertilizer. A steel quadrat measuring 0.15 × 0.15 m was used to mark out the area for stem density measurements. Six blueberry stems from each 0.15 × 0.15 m sample area were randomly cut using a knife to measure the stem height, stem diameter, number of branches and number of floral buds (FB). The six recordings taken from each quadrat were averaged to show the number per stem. Classical statistics was used to calculate minimum, maximum, mean and SD using Minitab®. ANOVA and least significant means with 95% confidence level were calculated using SAS® to examine and compare the effect of fungicide and foliar fertilizer on the plant parameters with SA, UA and CN.
The wild blueberry yield was manually harvested on August 20, 2015 using a 36-tooth hand rake from within a 0.5 × 0.5 m steel quadrat at each of the ten plots in each track to assess the effect of the fungicide and fertilizer tank mix on harvestable yield. The blueberries were collected from the vine as well as any blueberries that dropped onto the ground. The collected yield was packaged in a sealed plastic bag and later separated and weighed at the DAL-AC lab. Classical statistics were used to calculate minimum, maximum, mean and SD using Minitab®. ANOVA and least significant means with 95% confidence level were calculated using SAS® to examine and compare the effect of fungicide and foliar fertilizer on harvestable yield with SA, UA and CN.
Results and discussion
Field Experiment 1
The maximum percent area coverage from the SA tracks in the wild blueberry plant zones was 0.03% (Fig. 8). The minimum from the moss zones from SA and UA tracks were 30.22 and 18.23%, respectively (Fig. 8). The mean percent area coverage from water sensitive papers located in wild blueberry plant and moss areas from the SA track was 0.01 and 37.59%, respectively (Table 2). The mean percent area coverage of water sensitive papers from the UA track was 37.01%. The percent area coverage from water sensitive papers located in blueberry plant areas using SA was significantly lower than that of water sensitive papers in moss patches for both SA and UA (37.58 and 37.00%, respectively). The water sensitive papers in the moss areas in the SA test track were not significantly different from the UA water sensitive papers. The water sensitive papers placed in the UA track had the highest SD (10.45) most likely due to the uneven ground causing varying boom height and slight spray drift from wind gusts. The average percent area coverage from the SA on moss water sensitive papers (37.59%) was sufficient for eradication using a contact herbicide as it coincided with the UA amounts. The P value for the different application techniques was < 0.001 when comparing the water sensitive papers percent area coverage (Table 2). These results were in accordance with results from Zaman et al. (2011).

Percent area coverage of the sprayed water sensitive papers from a non-target blueberry plant locations in SA track, b target moss locations within SA track and c blueberry plant and moss infected zones of UA test track
The CN test tracks did not receive any Chateau® herbicide application. SA tracks 3, 5, 9 and 11 had 275.4, 179.9, 272.8 and 250.6 m2 moss coverage, respectively. UA tracks 2, 6, 8, and 12 had similar moss coverage; 221.5, 147.2, 141.3 and 244.1 m2, respectively. The average moss coverage for SA, UA and CN was 16.7, 12.9 and 9.2%, respectively. UA had the highest amount of total application applied to the test tracks because it was applied at the grower’s uniform rate. SA lowered the total amount applied to 6.2 l, 5.4 l, 6.1 l and 5.0 l of agrochemical applied to the four test tracks. The agrochemical savings using SA technique were 77.4, 80.3, 77.7 and 81.8% from the four test tracks. The average amount of agrochemical saved using SA was 79.3%. The agrochemical savings from SA have a direct impact on the farmer’s input cost.
ANOVA (P value < 0.05) showed no significant difference between percent moss coverage in the CN tracks at any of the five collection intervals (36.3, 36.3, 36.3, 23.6 and 30.5%). However, after July 2, 2014, both UA (15.3%) and SA (16.6%) tracks had a significantly lower moss coverage than initial readings (40.9 and 52.9%, respectively) (Fig. 9). There was no significant difference (P value = 0.211) in the percent moss coverage from the three treatments at the collection times on November 15, 2013, January 15, 2014 and May 8, 2014. Similarly, there was no significant difference (P value = 0.166 and 0.736) in the percent moss coverage from the three treatments at the collection times on July 2, 2014 and May 25, 2015, respectively.

Line graph showing the collected moss percent coverage at selected plots at each collection interval. Points that share the same letter grouping are not significantly different from one another in terms of the percentage of moss coverage
Results from a plot showing moss coverage versus collection interval revealed that the largest drop in moss coverage was in spring (Fig. 9). The results show that the Chateau® herbicide was not an effective method in reducing the amount of moss coverage in the selected plots. A possible factor that could have contributed to the ineffectiveness of the herbicide was unfavorable weather conditions after application causing the herbicide to leach into the soil or being evaporated into the air rather than staying on the surface to be used to eradicate the moss species. The results suggest that there is an utmost importance to insuring that the proper herbicide is being applied at the proper rate at the proper time and also with favorable weather conditions. If these measures are not met, the result can be a waste in terms of time and money causing costs to the farmer with no measurable reward.
Results from the harvest of the 120 plots showed the mean blueberry fruit yield was 1.02, 1.14 and 1.19 kg m−2 in CN, UA and SA tracks, respectively (Table 3). ANOVA (P value = 0.085) indicated that the harvestable yield was not significantly different between the three treatments. The results are as expected because the data showed no significant difference in moss coverage at the last collection interval before harvest. The variance in blueberry fruit yield parameters could be from external factors such as soil properties, disease and insect damage, pollination, winter kill and seasonal variations other than the Chateau® application. From the data gathered, it was not favorable to apply the Chateau® herbicide for control of the moss species given the weather conditions during the time of the experiment.
Field Experiment 2
Visual observation from the field testing indicated that the smart sprayer performed well for SA of agrochemical on foliage and shutting the nozzles off in bare soil zones in the test tracks. Each test track had a total area of 1027.5 m2. SA tracks 3, 4 and 6 had 116.0, 177.5 and 97.4 m2 bare soil coverage, respectively. UA tracks 2, 5 and 8 had similar bare soil coverage; 101.2, 110.7 and 120 m2, respectively. SA had the lowest application amounts of 16.9 l, 16.8 l and 17. 3 l from the three test tracks. Midtech legacy flow controller data showed the SA of fungicide and foliar fertilizer savings ranged from 10.0 to 12.6%. The SA savings were dependent upon the percentage of bare soil that was present in each track. The UA tracks received 100% fungicide coverage on both foliage areas and bare soil areas in each test track. The control tracks did not have any agrochemical application. The average amount of agrochemical saved was 11.6% with SA. The average bare spot coverage was 7.7, 10.8 and 12.7% with CN, UA and SA, respectively. The results would be expected to show higher agrochemical savings using SA from a developing field that had a higher proportion of bare soil. The agrochemical savings from SA have a direct impact on the farmer’s input cost.
The digital image results suggested that the application of fungicide and foliar fertilizer significantly improved the wild blueberry leaf retention and visual plant healthiness (Fig. 10). The percentage of healthy plants varied from 0 to 70% in the CN tracks, 30 to 100% in the UA tracks and 45 to 100% in the SA tracks in the field (Table 4). The UA and SA showed the application of fungicide and foliar fertilizer increased the percentage of healthy plants by 41.0 and 57.8%, respectively. ANOVA comparison (P value < 0.001) showed UA and SA of fungicide and foliar fertilizer had a significantly higher percentage of healthy plants as compared to the CN tracks. Bravo® has been suggested to reduce foliage disease keeping the blueberry plants green and healthy improving carbohydrate production for the developing FB (Percival and Dawson, 2009). SA tracks showed the highest percentage of healthy plants most likely due to the proper application of agrochemical and plant clonal variability that is common in wild blueberry fields. Large variation in percentage of healthy plants with CN (SD = 21.12) could have been due to the natural variation of blueberry rust and Septoria leaf spot damage. Each wild blueberry field has several different clones of wild blueberry and some of them may be more resistant against blueberry rust and Septoria leaf spot than others.

Digital image showing wild blueberry plant leaf retention from UA plot 2 (left) and CN plot 1 (right) on October 9th, 2014
ANOVA test (P value = 0.416) showed no significant difference between blueberry plant density 585, 628 and 586 stems m−2 in CN, UA and SA tracks, respectively (Table 5). This most likely was because new blueberry stems were already formed in early spring of the sprout year (McIsaac 1997). There was a significant difference (P value < 0.001) between mean stem heights 0.151, 0.172 and 0.191 m in CN, UA and SA tracks, respectively. Reasons why the UA and SA tracks had higher stem heights were most likely due to the ability of the foliar fertilizer to increase the nutrient supply causing increased growth. Similarly, there was a significant difference (P value = 0.005) with number of branches per stem 1.98a, 2.83b in CN and SA, respectively. There was also a significant difference (P value < 0.001) between stem diameters 0.0017, and 0.0021 m between CN, and SA tracks, respectively. The reasons for UA and SA tracks having larger stem diameters would also likely be due to the ability of the foliar fertilizer to increase the plants nutrient intake causing amplified plant growth compared to the CN tracks.
Results suggested that the application of fungicide and foliar fertilizer significantly increased the FB count as compared to CN tracks. The mean values of FB per stem were 2.74, 5.31 and 7.60 in CN, UA and SA, respectively (Table 6). The UA and SA of fungicide and foliar fertilizer increased FB formation by 93.8 and 177.4%, respectively over the CN tracks (Table 6). Results were similar to that found by Percival and Dawson (2009). Results from the harvested yield collection showed the mean wild blueberry fruit yield was 0.222, 0.412 and 0.528 kg m−2 in CN, UA and SA tracks, respectively (Table 6). ANOVA (P value < 0.001) indicated that the harvested yield was significantly higher in the UA and SA tracks as compared to the CN tracks. The UA and SA fungicide and foliar fertilizer increased the harvestable yield by 85.6 and 137.8%, respectively over the CN tracks. These results are in accordance with Percival and Dawson (2009) who found that Bravo® fungicide significantly increased harvestable yields. The variance in blueberry fruit yield parameters could have been caused from external factors such as soil properties, insect damage, pollination, winter kill and seasonal or clonal variations other than the fungicide and foliar fertilizer application. The results from this experiment suggest that fungicide and foliar fertilizer is beneficial for increased plant healthiness, stem height, stem diameter, number of branches and FB count resulting in an increased harvestable yield.
Conclusions
The smart sprayer allowed image capture and processing to send triggering signals fast enough to open the nozzles and spray at the proper location required at a travel speed of 1.7 m s−1. The rear mounted sprayer eliminated the front boom and other hardware accessories, and made the smart sprayer robust, cost-effective, compact and user friendly. Chateau® herbicide savings with SA ranged from 77.4 to 80.3% based on moss coverage within the field. Chateau® did not show any significant difference on harvestable yield among the three applications. Results suggested that it is of utmost importance to ensure the herbicide is being applied at the proper rate at the proper timing and also with favorable weather conditions. The Bravo®, Proline® fungicide and foliar fertilizer savings with SA ranged from 10.0 to 12.6% based on bare spot coverage within the field. Fungicide and the foliar fertilizer did not have any significant effect on plant density. However, stem height, stem diameter and number of stem branches all were significantly higher with the application applied. The percentage of healthy plants was higher by 41.0 and 57.8% for UA and SA, respectively over the CN. There was a significant increase in FB with both UA (93.8%) and SA (177.4%) of fungicide and foliar fertilizer as compared to CN. There was also a significant increase in harvestable yield by 85.6 and 137.8% for UA and SA, respectively over the CN. The SA savings while using the smart sprayer had a direct impact on farmer’s input costs associated with the agrochemical application. The smart sprayer equipped with rear mounted sensing system has potential to reduce the farmer’s input costs and increase farm profitability of wild blueberry growers.
References
Arima, S., Kondo, N., Shibusawa, S., & Yamashita, J. (2003). Traceability based on multi-operation robot; information from spraying, harvesting and grading operation robot. In Proceedings 2003 IEEE/ASME international conference on advanced intelligent mechatronics (Vol. 2, pp. 1204–1209).
Burgos-Artizzu, X. P., Ribeiro, A., Tellaeche, A., Pajares, G., & Fernández-Quintanilla, C. (2010). Analysis of natural images processing for the extraction of agricultural elements. Image and Vision Computing, 28(1), 138–149.
Carvalho, F. (2006). Agriculture, pesticides, food security and food safety. Environmental Science & Policy, 9, 685–692.
Chang, Y., Zaman, Q., Esau, T., & Schumann, A. (2014). Sensing system using digital photography technique for spot-application of herbicide in pruned wild blueberry fields. Applied Engineering in Agriculture, 30(2), 143–152.
Chattha, H. S., Zaman, Q. U., Chang, Y. K., Farooque, A. A., Schumann, A. W., & Brewster, G. R. (2015). Effect of lighting conditions and ground speed on performance of intelligent fertilizer spreader for spot-application in wild blueberry. Precision Agriculture, 16(6), 654–667.
Eaton, L. J. (1988). Nitrogen cycling in low bush blueberry stands. Ph.D. Thesis, Dalhousie University, Halifax, NS, Canada.
Esau, T., Zaman, Q., Chang, Y., Groulx, D., Schumann, A., & Farooque, A. (2014). Prototype variable rate sprayer for spot-application of agrochemicals in wild blueberry. Applied Engineering in Agriculture, 30(5), 717–725.
Gonzalez-de-Santos, P., Ribeiro, A., Fernandez-Quintanilla, C., Lopez-Granados, F., Brandstoetter, M., Tomic, S., et al. (2016). Fleets of robots for environmentally-safe pest control in agriculture. Precision Agriculture, 18(4), 574–614.
Hijazi, B., Decourselle, T., Vulgarakis Minov, S., Nuyttens, D., Cointault, F., Pieters, J., et al. (2012). The use of high-speed imaging systems for applications in precision agriculture. In C. Volosencu (Ed.), New technologies—Trends, innovations and research (pp. 279–296). Croatia: INTECH.
McCarthy, C., Rees, S., & Baillie, C. (2010). Machine vision-based weed spot spraying: a review and where next for sugarcane. In R. Bruce (Ed.), Proceedings of 32nd annual conference of the Australian Society of Sugar Cane Technologists (p. 1). New York, USA: Curran Associates.
McIsaac, D. (1997). Growing wild lowbush blueberries in Nova Scotia. Department of Agriculture and Marketing. Retrieved November 21, 2017, from https://cdn.dal.ca/content/dam/dalhousie/images/sites/wild-blueberry/pdfs/Growing_Wild_Lowbush_Blueberries_NS.pdf.
Moller, J. (2010). Computer vision—A versatile technology in automation of agricultural machinery. Journal of Agricultural Engineering, 47(4), 28–36.
O’Neall, L., & Sandford, J. (1993). Crop spraying system. U.S. Patent No. 5,222,324.
Pajares, G., García-Santillán, I., Campos, Y., Montalvo, M., Jose Miguel Guerrero, J., Emmi, L., et al. (2016). Machine-vision systems selection for agricultural vehicles: A guide. Journal of Imaging, 2(4), 34. https://doi.org/10.3390/jimaging2040034.
Percival, D., & Dawson, J. (2009). Foliar disease impact and possible control strategies in wild blueberry production. Acta Horticulturae, 810, 345–354.
Pérez-Ruiz, M., Gonzalez-de-Santos, P., Ribeiro, A., Fernández-Quintanilla, C., Peruzzi, A., Vieri, M., et al. (2015). Highlights and preliminary results for autonomous crop protection. Computers and Electronics in Agriculture, 110, 150–161.
Pimentel, D., & Lehman, D. (1993). The Pesticide Question. Environment, Economics, and Ethics., 14(3), 239–240.
Piron, A., Van Der Heijden, F., & Destain, M. F. (2011). Weed detection in 3D images. Precision Agriculture, 12(5), 607–622.
Sabzi, S., Abbaspour-Gilandeh, Y., & Javadikia, H. (2017). Machine vision system for the automatic segmentation of plants under different lighting conditions. Biosystems Engineering, 161, 157–173.
Steward, B., & Tian, L. 1998. Real-time machine vision weed-sensing. Paper No. 983033. St Joseph, MI, USA: ASABE.
Zaman, Q., Esau, T., Schumann, A., Percival, D., Chang, Y., Read, S., et al. (2011). Development of prototype automated variable rate sprayer for real-time spot-application of agrochemicals in wild blueberry fields. Computer and Electronics in Agriculture, 76(20), 175–182.
Zaman, Q., Schumann, A., Percival, D., & Gordon, R. (2008). Estimation of wild blueberry fruit yield using digital color photography. Transactions of American Society of Biological Engineers, 51(5), 1539–1544.
Acknowledgements
This work was supported by Doug Bragg Enterprises, Oxford Frozen Foods, Wild Blueberry Producers Association of Nova Scotia and Natural Sciences and Engineering Research Council of Canada. The authors would like to give special thanks to the precision agriculture team at the DAL-AC for their help with development and testing of the smart sprayer. Special thanks to Joe Slack (president, Slack Farms Ltd.) and Tom Groves (farm manager, Slack Farms Ltd.) for their continued support with agrochemical applications and wild blueberry field sites for testing.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Esau, T., Zaman, Q., Groulx, D. et al. Machine vision smart sprayer for spot-application of agrochemical in wild blueberry fields. Precision Agric 19, 770–788 (2018). https://doi.org/10.1007/s11119-017-9557-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-017-9557-y