
Abstract
In this study, we extract the different kinds of exact wave solutions to the (1+1) dimensional Chiral nonlinear Schrödinger equation (CNLSE) that describes the edge states of the fractional quantum hall effect in quantum field theory. The extended rational sine–cosine/sinh–cosh techniques are utilized for obtaining solutions. Parametric conditions on physical parameters are also enumerated to ensure the existence criteria of soliton solutions. Moreover, the stability analysis is also discussed. By the suitable selection of parameters, three dimensional, two dimensional and contour plots are sketched. The obtained outcomes show that the applied computational strategies are direct, efficient, concise and can be implemented in more complex phenomena with the assistant of symbolic computations.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Diverse complicated nonlinear physical characteristics may be signified in shape of nonlinear partial differential equations (NLPDEs). In recent years, NLPDEs have gained a remarkable attention in the realm of nonlinear sciences due to its wide range usage and applications. The NLPDEs perform a great role in plasma physics, ocean engineering, optical fibers, physics, biology, quantum physics, fluid mechanics, geochemistry and many other scientific areas to explain the dynamical and physical processes (Seadawy et al. 2019; Seadawy and Cheemaa 2020; Zhou 2014; Younis et al. 2018; Ozkan et al. 2020; Ahmad et al. 2020; Arshad et al. 2017b, c). In this advanced era of science and technology, the study of nonlinear phenomena has become attractive field for scientists and engineers. The NLPDEs explain the behaviour of waves in different fields. The exact solution of NPDEs plays major role to understand many physical phenomena in the various natural sciences. Due to this different kind of powerful and effective techniques are introduced to find exact and analytic solutions by using computational algebra as the discrete symmetry analysis of some classical and fractional differential equations; Lie symmetry analysis of conformable differential equations and Lie symmetry analysis and conservation laws for the time fractional Black-Scholes equation (Chatibi et al. 2019a, b, 2020). It is not possible to apply each method to all governing models because every method has its own shortcomings and criteria for the application to the governing model for discussing the exact solutions (Darvishi et al. 2018; Younis et al. 2020; Sulaiman et al. 2019; Ali et al. 2018; Zhang et al. 2011; Seadawy 2017a, b; Arshad et al. 2017a; Seadawy 2015, 2012). Particularly exact wave structures are presented in a quantum field and also in mathematical physics in the context of wave description of elementary systems. The study of quantum field theory is still booming, as the uses of its mechanism to many physical problems. In quantum field theory, the wave structures play an important role in the non-perturbative developments. It remains one of the most dynamic areas of theoretical physics today, providing a common language to several other branches of physics. Due to this different kind of powerful and effective techniques are introduced to find exact and analytic solutions by using computational algebra (Seadawy and Jun 2017; Younas et al. 2021; Ozkan et al. 2021; Seadawy et al. 2021a, b; Bilal et al. 2021a, b; Rizvi et al. 2021a, b). It is not possible to apply each method to all governing model because every method has its own shortcomings and criteria for the application to the governing model for discussing the exact solutions. Recently, the CNLSE has been analyzed by a number of effective approaches (Bulut et al. 2017; Abdul Al Woadud et al. 2019; Eslami 2016; Raza and Javid 2018; Ali et al. 2018; Dianchen et al. 2017; Johnpillai et al. 2012; Ali et al. 2017; Gianzo et al. 1999; Younis et al. 2016; Agrawal 2013; Seadawy 2017b) which yields fruitful results in diverse areas of nonlinear sciences.
The (1+1)-dimensional CNLSE is given by Nishino et al. (1998)
where \(\Theta\) represents the complex function of x and t, while \(\sigma\) indicates nonlinear coupling constant and the \(*\) represents the complex conjugate.
However in this work, the key objective is to extract solitary wave solutions of (1+1)-dimensional CNLSE via extended rational sine–cosine/sinh–cosh techniques in quantum field theory. The (1+1)-dimensional CNLSE has been taken as model to demonstrate the efficiency of these proposed schemes.
This piece of article is discussed as sequence: in Sect. 2, overview of the methods. In Sect. 3, applications. In Sect. 4, modulation instability analysis. In Sect. 5, results and discussion and finally paper come to end with conclusions in Sect. 6.
2 Overview of the methods
We describe the first step of the extended rational methods for seeking the solutions of NLPDEs in this section.
Suppose that a NLPDE in its general form
where F is a polynomial in u and its partial derivatives and \(u=u(x,t)\) is an unknown function. Suppose that
Then, by using (3), Eq. (2) can be turned into following ODE with respect to \(\xi\)
In next we discuss the exact solutions of Eq. (4) by using the extended rational techniques.
2.1 Extended rational sine–cosine method
We assume that Eq. (4) has following forms of solutions
where \(a_{0}\), \(a_{1}\) and \(a_{2}\) are parameters to be found in terms of the other parameters. The non-zero constant \(\eta\) is the wave number. The derivatives of the predicted solutions are
in the first form and
in the second form. We substitute Eqs.(7) or (9) into the reduced form of the governing equation obtained above in Eq. (4). On collecting the same power coefficients of the \(\cos ^{m}(\eta \xi )\) or \(\sin ^{m}(\eta \xi )\) and equating to zero, we get a cluster of algebraic expression. The obtained algebraic polynomial produce the values of the coefficients involved. After determine \(a_{0}\), \(a_{1}\), \(a_{2}\), c and \(\eta\) in terms of other parameters and substitute into Eqs. (5) and (6), one gets solutions for Eq. (4) in rational sin-cos forms.
2.2 Extended rational sinh–cosh method
According to this method, which was introduced by Darvishi et al. (2018), we suppose that solutions of Eq. (4) can be written in the following forms
Where \(a_{0}\), \(a_{1}\) and \(a_{2}\) are parameters to be found in terms of the other parameters. The non-zero constant \(\eta\) is the wave number. The derivatives of the predicted solutions are
in the first form and
in the second form. We substitute Eq. (13) or (15) into the reduced form of the governing equation obtained above in Eq. (4). On collecting the same power coefficients of the \(\cosh ^{m}(\eta \xi )\) or \(\sinh ^{m}(\eta \xi )\) and equating to zero, we achieve a cluster of algebraic expression. The obtained algebraic polynomial produce the values of the coefficients involved. After determine \(a_{0}\), \(a_{1}\), \(a_{2}\), c and \(\eta\) in terms of other parameters and substitute into Eqs. (11) and (12), one gets solutions for Eq. (4) in rational sinh–cosh forms.
3 Applications
For solving Eq. (1), we start with complex wave transformation \(\Theta (x,t)=\Psi (\tau )e^{i\Phi }, ~\text{ where }~\tau =c(x+\upsilon t), \Phi = k x +\omega t + \varphi .\) Here \(c, \nu , \varphi ,\omega\) and k are parameters, which represent the amplitude component of the soliton, velocity of soliton, phase constant, frequency and wave number respectively. Substitute transformation into Eq. (1), from the imaginary part we get the relation
and we obtain
from the real part. Using homogeneous balance principle, we yields, \(n = 1\).
3.1 Solutions via extended rational sine–cosine method
Assume that Eq. (18) possesses the solutions of the form
Inserting Eq. (19) and its derivative into Eq. (18) and the coefficients having same power of \(\cos (\eta \tau )^{m}\) equal to zero and resultantly, a bunch of equations is retrieved by using Mathematica:
On solving above equations, we attain the following sets of solutions as:
Set-1
Set-2
For set 1, we express the solutions of Eq. (1) as:
Similarly, for set 2 we have the following solutions:
OR
Consider the Eq.(18) has solutions in the form as
Inserting Eq. (26) and its derivative into Eq. (18) and the coefficients having same power of \(\sin (\eta \tau )^{m}\) equal to zero and resultantly, a bunch of equations is retrieved by using Mathematica:
On solving above equations, we attain the following sets of solutions as:
Set-3
Set-4
For set 3, we get the solutions of Eq. (1) in following form:
Similarly, for set 4, we have the following form of solutions:
3.2 Solutions via extended rational sinh–cosh approach
Assume that the Eq.(18) has solutions of the form
Inserting Eq. (33) and its derivative into Eq. (18) and the coefficients having same power of \(\cosh (\eta \tau )^{m}\) equal to zero and resultantly, a bunch of equations is retrieved by using Mathematica:
On solving above equations, we attain the following sets of solutions as:
Set-5
Set-6
For set 5 the solutions of Eq. (1) can be written as:
Similarly, for set 6 the solutions of Eq. (1) can be written as:
OR
Consider the Eq.(18) has solutions in the form as
Inserting Eq. (40) and its derivative into Eq. (18) and the coefficients having same power of \(\sinh (\eta \tau )^{m}\) equal to zero and resultantly, a bunch of equations is retrieved by using Mathematica:
On solving above equations, we attain the following sets of solutions as:
Set-7
Set-8
For set 7, we get the solutions of Eq. (1) in the following form:
Similarly, for set 8, we get the solutions as:
4 Modulation instability analysis
In this section, we analyze the modulation instability(MI) of the (1+1) dimensional CNLSE with the aid of the general concept of linear stability (Agrawal 2013; Seadawy 2017b; Ahmed et al. 2019).
Consider the steady-state solutions of the CNLSE to be of the form
where \(k_{0}\) represents the normalized power.
Putting Eq. (47) into Eq. (1) and linearizing, provides
where H(x, t) is unknown complex function and * stands for the conjugate of H(x, t).
We assume that the solution of Eq. (48) to be in the following form
where l and \(\varpi\) denote the normalized wave number, and frequency of perturbation, respectively.
Putting Eq. (49) into Eq. (48), separate the coefficients of \(e^{i(l x-\varpi t)}\) and \(e^{-i(l x-\varpi t)}\), we attain the dispersion relation after solving the determinant of the coefficient matrix.
Calculating the dispersion relation (50) for \(\varpi\), grants
The obtained dispersion relation reveals the steady-state stability. If the wave number \(\varpi\) is imaginary one then steady-state solution turn to unstable since the perturbation grows exponentially. Moreover if the wave number \(\varpi\) has real part then steady state turns to stable against small perturbations. Therefore, the steady-state solution is unstable if:
Finally, the MI gain spectrum G(l) is achieved as

The dispersion relation between frequency \(\varpi\) and wave number l for distinct values of \(k_0=.6, .8, 1\)
5 Results and discussion
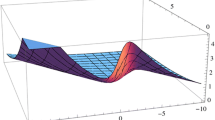
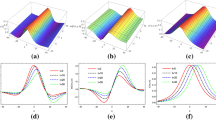
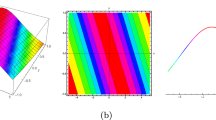
The graphical view of some reported result deals in this section. By applying proposed methods the exact wave solutions are extracted and graphically depicted into distinct physical structures in the form of multiple soliton solutions like, trigonometric, hyperbolic, periodic and singular wave functions. By the appropriate values of involved parameters, the real and absolute behaviors of some solutions are reported. Figure 2 for Eq. (20) and Fig. 3 for Eq. (28) represent wave solutions repeated periodically, while Figs 4 and 5 for the Eqs. (34) and (37) describe the dark soliton and exact wave solutions respectively. Moreover, Figes. 7 and 6 represent the singular soliton and exact wave solution for the equations Eqs. (43) and (41) respectively. These exact wave solutions have different physical behavior. For example, hyperbolic functions such as, the hyperbolic tangent appears in the calculation and rapidity of special relativity while, the hyperbolic cotangent arises in the Langevin function for magnetic polarization Weisstein (2002). Therefore, the result sake in this paper may be used to explain such relationship to the governing model.

The a, b and c show the 3D, 2D and contour physical behaviour of solution (20), respectively with the values \(k=-1\), \(\omega =3\), \(\sigma =2\), \(\varphi =0\)

The a, b and c show the 3D, 2D and contour physical behaviour of solution (28), respectively with the values \(k=2\), \(\eta =2\), \(\sigma =-3\), \(\varphi =.3\), \(c=1\)

The a, b and c show the 3D, 2D and contour physical behaviour of solution (34), respectively with the values \(\omega =-4\), \(\eta =-1\), \(\sigma =2\), \(\varphi =.3\), \(c=-1\)

The a, b and c show the 3D, 2D and contour physical behaviour of solution (37), respectively under the parametric values of \(\omega =-3\), \(\eta =-2\), \(\sigma =1\), \(\varphi =.-1\), \(c=-1\)

The a, b and c show the 3D, 2D and contour physical behaviour of solution (41), respectively under the parametric values of \(k=-2\) \(\omega =-3\), \(\eta =-1\), \(\sigma =-2\), \(\varphi =0\)

The a, b and c show the 3D, 2D and contour physical behaviour of solution (43), respectively under the parametric values of \(\omega =-3\), \(\eta =-2\), \(\sigma =1\), \(\varphi =.-1\), \(c=-1\)
6 Conclusions
In this research work, we have investigated diverse exact wave solutions are constructed in the form of trigonometric and hyperbolic solutions including dark soliton, kink type, singular soliton as well as periodic wave solutions to (1+1)-dimensional CNLSE via extended rational sine–cosine/sinh–cosh schemes. These various kinds of wave solutions are favourable for explaining diverse nonlinear physical phenomena. The MI analysis to the proposed model is also observed. Our acquired solutions exhibited that the proposed methods are powerful and can be used to extract exact wave solutions for various kinds of NLPDEs. Furthermore, we plot 3D, 2D and contour graphs of the some obtained solutions by setting appropriate values of involved parameters. It may be observed that wave behavior have reported their estimated wave propagation and distributions, physically, in Figs. 1, 2, 3, 4, 5 and 6. The results are new, interesting and have a great impact in the quantum field theory where the (1+1)-dimensional CNLSE will be used for the dynamics of exact wave solutions.
References
Abdul Al Woadud, K.M., Kumar, D., Islam, M.J., ImrulKayes, M., Joardar, A.K.: Analytic solutions of the chiral nonlinear Schrödinger equations investigated by an efficient approach. Int. J. Phys. Res. 7(2), 94–99 (2019)
Agrawal, G.P.: Nonlinear Fiber Optics. Academic Press, New York (2013)
Ahmad, H., Seadawy, A.R., Khan, T.A., Thounthong, P.: Analytic approximate solutions Analytic approximate solutions for some nonlinear Parabolic dynamical wave equations. Taibah Univ. J. Sci. 14(1), 346–358 (2020)
Ahmed, I., Seadawy, A.R., Lu, D.: M-shaped rational solitons and their interaction with kink waves in the Fokas–Lenells equation. Phys. Scr. 94, 055205 (2019)
Ali, A., Seadawy, A., Dianchen, L.: Soliton solutions of the nonlinear Schrodinger equation with the dual power law nonlinearity and resonant nonlinear Schrodinger equation and their modulation instability analysis. Optik - Int. J. Light Electron Opt. 145, 79–88 (2017)
Ali, A., Seadawy, A.R., Dianchen, L.: Computational methods and traveling wave solutions for the fourth-Order nonlinear Ablowitz–Kaup–Newell–Segur water wave dynamical equation via two methods and its applications. Open Phys. 16, 219–226 (2018)
Ali, A., Seadawy, A.R., Dianchen, L.: New solitary wave solutions of some nonlinear models and their applications. Adv. Differ. Equ. 2018(232), 1–12 (2018)
Arshad, M., Seadawy, A., Lu, D.: Exact Bright–Dark solitary wave solutions of the higher-order cubic-quintic nonlinear Schrodinger equation and its stability. Optik - Int. J. Light Electron Opt. 138, 40–49 (2017a)
Arshad, M., Seadawy, A., Lu, D.: Elliptic function and Solitary Wave solutions of the higher-order nonlinear Schrodinger dynamical equation with fourth-order dispersion and cubic-quintic nonlinearity and its stability. Eur. Phys. J. Plus 132, 371 (2017b)
Arshad, M., Seadawy, A., Lu, D.: Modulation stability and optical soliton solutions of nonlinear Schrodinger equation with higher order dispersion and nonlinear terms and its applications. Superlattices Microstruct. 112, 422–434 (2017c)
Bilal, M., Seadawy, A.R., Younis, M., Rizvi, S.T.R., El-Rashidy, K., Mahmoud, S.F.: Analytical wave structures in plasma physics modelled by Gilson–Pickering equation by two integration norms. Results Phys. 23, 103959 (2021a)
Bilal, M., Seadawy, A.R., Younis, M., Rizvi, S.T.R., Zahed, H.: Dispersive of propagation wave solutions to unidirectional shallow water wave Dullin–Gottwald–Holm system and modulation instability analysis. Math. Methods Appl. Sci. 44(5), 4094–4104 (2021b)
Bulut, H., Sulaiman, T.A., Demirdag, B.: Dynamics of soliton solutions in the chiral nonlinear Schrödinger equations. Nonlinear Dyn. 91(3), 1985–1991 (2017)
Chatibi, Y., Kinani, E.H.E., Ouhadan, A.: On the discrete symmetry analysis of some classical and fractional differential equations. Math. Methods Appl. Sci. 44(4), 2868–2878 (2019a)
Chatibi, Y., Kinani, E.H.E., Ouhadan, A.: Lie symmetry analysis of conformable differential equations. AIMS Math. 4(4), 1133–1144 (2019b)
Chatibi, Y., El Kinani, E.H., Ouhadan, A.: Lie symmetry analysis and conservation laws for the time fractional Black-Scholes equation. Int. J. Geometric Methods Modern Phys. 17(01), 2050010 (2020)
Darvishi, M.T., Najafiand, M., Seadawy, A.R.: Dispersive bright, dark and singular optical soliton solutions in conformable fractional optical fiber Schrodinger models and its applications. Opt. Quant. Electron. 50(181), 1–16 (2018)
Darvishi, M.T., Najafi, M., Wazwaz, A.M.: New extended rational trigonometric methods and applications. Waves Random Complex 30, 1–22 (2018)
Dianchen, L., Seadawy, A., Arshad, M.: Applications of extended simple equation method on unstable nonlinear Schrodinger equations. Optik - Int. J. Light Electron Opt. 140, 136–144 (2017)
Eslami, M.: Trial solution technique to chiral nonlinear Schrodinger’s equation in (1+2)-dimensions. Nonlinear Dyn. 85(2), 813–816 (2016)
Gianzo, D., Madsen, J.O., Guilln, J.S.: Integrable chiral theories in (2 + 1) dimensions. Nucl. Phys. B 537, 586–598 (1999)
Johnpillai, A.G., Yildirim, A., Biswas, A.: Chiral solitons with Bohm potential by lie group analysis and traveling wave hypothesis. Rom. J. Phys. 57, 545–554 (2012)
Nishino, A., Umeno, Y., Wadati, M.: Chiral nonlinear Schrodinger equation. Chaos Solitons Fractals 9(7), 1063–1069 (1998)
Ozkan, Y.G., Yaşar, E., Seadawy, A.: A third-order nonlinear Schrodinger equation: the exact solutions, group-invariant solutions and conservation laws. J. Taibah Univ. Sci. 14(1), 585–597 (2020)
Ozkan, Y.S., Seadawy, A.R., Yasar, E.: On the optical solitons and local conservation laws of Chen–Lee–Liu dynamical wave equation. Optik - Int. J. Light Electron Opt. 227, 165392 (2021)
Raza, N., Javid, A.: Optical dark and dark-singular soliton solutions of (1+2)-dimensional chiral nonlinear Schrodinger’s equation. Waves Random Complex 29, 1–13 (2018)
Rizvi, S.T.R., Seadawy, A.R., Younis, M., Iqbal, S., Althobaiti, S., El-Shehawi, A.M.: Various optical soliton for a weak fractional nonlinear Schrödinger equation with parabolic law. Results Phys. 23, 103998 (2021a)
Rizvi, S.T.R., Seadawy, A.R., Bibi, I., Younis, M.: Chirped and chirp-free optical solitons for Heisenberg ferromagnetic spin chains model. Modern Phys. Lett. B 35(8), 2150139 (2021b)
Seadawy, A.R.: Exact solutions of a two-dimensional nonlinear Schrodinger equation. Appl. Math. Lett. 25, 687–691 (2012)
Seadawy, A.R.: Approximation solutions of derivative nonlinear Schrodinger equation with computational applications by variational method. Eur. Phys. J. Plus 130(182), 1–10 (2015)
Seadawy, A.: The generalized nonlinear higher order of KdV equations from the higher order nonlinear Schrodinger equation and its solutions. Optik - Int. J. Light Electron Opt. 139, 31–43 (2017a)
Seadawy, A.R.: Modulation instability analysis for the generalized derivative higher order nonlinear Schrödinger equation and its the bright and dark soliton solutions. J. Electromagn. Waves Appl. 31(14), 1353–1362 (2017b)
Seadawy, A.R., Cheemaa N.: Some new families of spiky solitary waves of onedimensional higher-order K-dV equation with power law nonlinearity in plasma physics. Indian J. Phys. 94, 117–126 (2020)
Seadawy, A.R., Jun, W.: Mathematical methods and solitary wave solutions of three-dimensional Zakharov–Kuznetsov–Burgers equation in dusty plasma and its applications. Results Phys. 7, 4269–4277 (2017)
Seadawy, A.R., Iqbal, M., Lu, D.: Nonlinear wave solutions of the Kudryashov–Sinelshchikov dynamical equation in mixtures liquid-gas bubbles under the consideration of heat transfer and viscosity. J. Taibah Univ. Sci. 13(1), 1060–1072 (2019)
Seadawy, A.R., Bilal, M., Younis, M., Rizvi, S.T.R., Althobaiti, S., Makhlouf, M.M.: Analytical mathematical approaches for the double-chain model of DNA by a novel computational technique. Chaos Solitons Fractals 144, 110669 (2021a)
Seadawy, A.R., Rehman, S.U., Younis, M., Rizvi, S.T.R., Althobaiti, S., Makhlouf, M.M.: Modulation instability analysis and longitudinal wave propagation in an elastic cylindrical rod modelled with Pochhammer–Chree equation. Physica Scripta 96(4), 045202 (2021b)
Sulaiman, T.A., Bulut, H., Atas, S.S.: Optical solitons to the fractional Schrödinger–Hirota equation. Appl. Math. Nonlinear Sci. 4(2), 535–542 (2019)
Weisstein, E.W.: Concise Encyclopedia of Mathematics, 2nd edn. CRC Press, New York (2002)
Younas, U., Younis, M., Seadawy, A.R., Rizvi, S.T.R., Althobaiti, S., Sayed, S.: Diverse exact solutions for modified nonlinear Schrödinger equation with conformable fractional derivative. Results Phys. 20, 103766 (2021)
Younis, M., Cheemaa, N., Mahmood, S.A., Rizvi, S.T.R.: On optical solitons: the chiral nonlinear Schrödinger equation with perturbation and Bohm potential. Opt. Quant. Electron. 48, 542 (2016)
Younis, M., Cheemaa, N., Mehmood, S.A., Rizvi, S.T.R., Bekir, A.: A variety of exact solutions to (2+1)-dimensional Schrödinger Equation. Waves Random Compl. 30, 1–10 (2018)
Younis, M., Sulaiman, T.A., Bilal, M., Rehman, S.U., Younas, U.: Modulation instability analysis, optical and other solutions to the modified nonlinear Schrödinger equation. Commun. Theor. Phys. 72, 065001 (2020)
Zhang, Z., Li, Y.X., Liu, Z.H., Miao, X.J.: New exact solutions to the perturbed nonlinear Schrodinger’s equation with Kerr law nonlinearity via modified trigonometric function series method. Commun. Nonlinear Sci. Numer. Simulat. 16, 3097–3106 (2011)
Zhou, Q.: Analytic study on solitons in the nonlinear fibers with time-modulated parabolic law nonlinearity and Raman effect. Optik 125, 3142–3144 (2014)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Rehman, S.U., Seadawy, A.R., Younis, M. et al. On study of modulation instability and optical soliton solutions: the chiral nonlinear Schrödinger dynamical equation. Opt Quant Electron 53, 411 (2021). https://doi.org/10.1007/s11082-021-03028-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-021-03028-1