
Abstract
We present a radial basis function-based local collocation method for solving time fractional nonlinear diffusion wave equation.The main beauty of the local collocation method is that only the nodes located in the subdomain, surrounding the local collocation point, need to be considered when we are calculating the numerical solution at this point. We also prove the unconditional stability and convergence of the proposed scheme. Some numerical experiments are carried out and numerical results are compared with an analytical solution to confirm the efficiency and reliability of the proposed method.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the last few decades, there has been growing interest observed in fractional calculus due to its capabilities to model various phenomenon in the fields of applied science, physics, engineering, and finance [1, 3, 5, 6]. The wide applicability of fractional equations attract the researcher to find its reliable and accurate solutions using the suitable technique such as collocation method [33], finite difference method [19, 41, 44], collocation method [2], finite element method [11, 27], spectral method [17], element-free Galerkin (EFG) method [7], and homotopy analysis method [15].
In last two decades, special attention has been devoted to solving differential equations by meshfree methods, more precise methods based on radial basis function (RBF). The main feature of the method is they avoid the use of meshes hence known as meshfree and applicable on irregular domain as well. In [30], Mardani et al. developed meshless method for time fractional advection-diffusion equation with variable coefficients, Wen Chen et al. [5] developed Kansa method for time fractional diffusion equations,Yang et al. [43] developed MLS meshless method for time fractional diffusion-wave equation, Dehghan et al. [14] developed element-free Galerkin method for time fractional diffusion wave equation, Dehghan et al. [12] presented collocation method for time fractional nonlinear sine-Gordon and Klein-Gordon equations, Salehi [35] introduced meshless point collocation method for multiterm diffusion wave equation, Tayebi et al. [39] presented meshless methods for solving two-dimensional variable-order time fractional advection-diffusion equation, Hosseini et al. [25] solve fractional telegraph equation by using radial basis functions collocation method, Pinghui, et al. [45] extended meshless MLS method for time-dependent fractional advection-diffusion equations, Liu et al. [29] presented collocation method for time fractal mobile/immobile transport model, and Sun et al. [37] presented an fast Kansa collocation method for spatiotemporal fractional diffusion equation. For more application of meshfree method refer [4, 8, 9, 20, 22,23,24, 31, 32, 40, 42] and references therein. Generally, the global version of meshfree method suffered the stability issue and in fact there is trade off observation in RBF collocation method. To avoid these issue, several local versions of meshfree methods are proposed. In [28], Kumar et al. presented local collocation method for time fractional diffusion wave equation, Ghehsareh et al. [21] presented local weak form meshless method to simulate a variable order time-fractional mobile-immobile transport model, and Hosseini et al. [26] presented a local radial point interpolation (MLRPI) method for solving time fractional diffusion-wave equation with damping term. The selection of optimal shape parameter is not an easy task, during the implementation of the collocation method, but there are some strategies are available for selecting suitable value of the shape parameter in local RBF base methods, for more details, we refer Sarra [36], Dehghan [10, 13, 16, 18], and reference therein.
In this paper, we consider the following fractional diffusion-wave equation
where T > 0, 1 < α < 2, and f(x, t) is sufficiently smooth function. The function F(u(x, t)) satisfies the Lipschitz condition with respect u(x,t) with Lipschitz constant L. Furthermore for any positive integer k, the \(_{0}^{c}{\mathcal{D}}_{t}^{\alpha }u(\textbf {x},t)\) is Caputo’s differential operator define as
In present work, a meshless radial basis function-based local collocation method for spatial approximation and a finite difference approximation for Caputo’s time derivatives is employed for numerical solution of time fractional nonlinear diffusion wave equation presented.
The rest of this paper is organized as follows: In Section 2, time discretization scheme is presented; furthermore, this section is also devoted to prove the stability and convergence of the numerical scheme in semi-discrete form. Section 3 give us brief discussion of local collocation method and numerical implementation of the proposed method. In Section 4, we did some numerical experiments on test problems and provide computational results to prove the efficiency and accuracy of the proposed method. Finally, Section 5 end with some concluding remark.
2 The time discretization
This section devoted for development and analysis of time semi-discretization of the proposed problem (1).
The Caputo’s fractional derivative \(_{0}^{c}{\mathcal{D}}_{t}^{\alpha }u(\textbf {x},t)\) could be rewritten as follows
For any positive integer N, we let \(\delta t= \frac {T}{N}\), be the time step, and tn = nδt, n = 0,1,…, N be temporal mesh points.
Let us introduced the notation \(u^{n-\frac {1}{2}}=\frac {1}{2}(u^{n}+u^{n-1})\), and \(\delta _{t}u^{n-\frac {1}{2}}=\frac {1}{\delta t}(u^{n}-u^{n-1})\), where un is the abbreviation of u(x, tn).
Lemma 1
Suppose 1 < α < 2, and g(t) ∈ C2[0, T], it holds that
and
Proof
See [38]. □
Lemma 2
Let 1 < α < 2, \(a_{0}=\frac {1}{\delta t {\varGamma }(2-\alpha )} \), and \(b_{k}=\frac {\delta t^{2-\alpha }}{ (2-\alpha )}\left [(k+1)^{2-\alpha }-(k)^{2-\alpha }\right ]\), k = 0,1,2,…, then
Proof
See [38]. □
Lemma 3
Let 1 < α < 2, and \(b_{k}=\frac {\delta t^{2-\alpha }}{ (2-\alpha )}\left [(k+1)^{2-\alpha }-(k)^{2-\alpha }\right ]\), k = 0,1,2,…, then
Proof
See [38]. □
Now let us define
Now application of Taylor expansion and (7) yields
and define the numerical scheme as
where
From (8), we have
using Lemma 2, we have
Now define the operator
and using condition v0 = v(x,0) = ψ(x) = ψ, we have
where
Now substituting (9) into (13), we have
now substituting above expression in (10), we have
where
where \(C=\left \{ \frac {2C_{1}}{(2-\alpha ){\varGamma }(2-\alpha )}+C_{2}+C_{3}\right \}\).
Now omitting the truncation error term \(R^{n-\frac {1}{2}}\), and approximating exact value un by its numerical approximation Un, we have following discrete scheme
or equivalently we have
where \({\mathcal{L}}\) is linear differential operator and b is function that contained contribution from previous time level and given as:
2.1 Error analysis: convergence and stability
Now we discuss the convergence and stability of the time discrete scheme in L2 norm.
Lemma 4
For any G = {G1, G2,…}, and q, we have
Proof
See [38]. □
Lemma 5
(Discrete Gronwall Lemma) Assume that xn is nonnegative sequence, and that the sequence yn satisfies
then yn satisfies
Moreover, if δ0 ≥ 0 and zn ≥ 0 for n ≥ 0, it follows
Proof
See [34]. □
Theorem 1
Let Un and \(\tilde {U}^{n}\) be the exact and approximated solution of the (17) respectively, both belonging to \({H_{0}^{1}}\). Then the time discrete scheme (17) is unconditionally stable and have the following inequality:
where \(e^{n}=U^{n}-\tilde {U}^{n}\).
Proof
The error equation is
now multiplying above equation with by \(\delta _{t}e^{n-\frac {1}{2}}\), and integrating over Ω, we have
now using the fact
we have
now summing up both side of the above inequality from n = 1 to n = m, we have
Now since F(u) satisfies Lipschitz condition with Lipschitz constant L, so we have
also using inequality \(|xy| \leq \frac {1}{2 \theta } x^{2}+ \frac {\theta }{2}y^{2}\), together with \(\theta = \frac {t_{m}^{1-\alpha }}{{\varGamma }(2-\alpha )}\), we have
Now using above relation together with Lemma 4, we have
Now simplifying above relation and changing index from m to n, we have
Finally, using Poincare inequality [7], \(\|e^{n} \|^{2} \leq C_{\varOmega }^{2} \|\nabla e^{n} \|^{2}\), we have
The application of Discrete Gronwall Lemma 5, with parameters zk = 0, \(\delta _{0}=C_{\varOmega }^{2}\|\nabla e^{0} \|^{2} \), \(x_{k}=\delta t L^{2} C_{\varOmega }^{2}{\varGamma }(2-\alpha ) t_{n}^{\alpha -1}\), and yk = ∥ek∥2, we have
Therefore we have
where \(C=C_{\varOmega }\sqrt {\exp \left (L^{2} C_{\varOmega }^{2}{\varGamma }(2-\alpha ) T^{2}\right )}\). □
Theorem 2
Let un and Un be the solution of (16) and (17), respectively, such that both belonging to \({H^{1}_{0}}\). Then time semi-discrete scheme (17) is convergent with convergence order \(\mathcal {O}(\delta t)\).
Proof
Let us define \(\mathcal {E}^{n}=u^{n}-U^{n}\) for n ≥ 1, together with \(\mathcal {E}^{0}=0\). Now subtracting (17) from (16), we have
multiplying above equation by \(\delta _{t}\mathcal {E}^{n-\frac {1}{2}}\), and integrating over Ω, we get
Now summing the above relation from n = 1 to m, we have
now application of Lemma 4, yields
Using inequality \(|xy| \leq \frac {1}{2 \theta } x^{2}+ \frac {\theta }{2}y^{2}\), together with \(\theta = \frac {t_{m}^{1-\alpha }}{2{\varGamma }(2-\alpha )}\), we have
Using above relation into (26), we have
changing index from m to n, multiplying both sides by 2δt, and after simplification we get
Now using Poincare inequality [7], we have
now using Lemma 5, with parameters zk = 0, \(\delta _{0}=C_{\varOmega }^{2} C^{2}T{\varGamma }(2-\alpha )\delta t^{2} \), \(x_{k}=\delta t L^{2} C_{\varOmega }^{2}{\varGamma }(2-\alpha ) t_{n}^{\alpha -1}\), and \(y_{k}=\|\mathcal {E}^{k}\|^{2}\) yields:
Therefore, we have
which completes the proof. □
3 Spatial discretization by the local collocation method
In local collocation method, the computational domain Ω, containing M collocation points, is partitioned into M overlapping sub domains Ωi, such that \(\bigcup _{i=1}^{M} {\varOmega }_{i}={\varOmega }\). For each \(\textbf {x}_{k}^{[i]}\in \varOmega _{i}\), the influence points of \(\textbf {x}_{k}^{[i]}\) are \(\left \{\mathbf {x}_{1}^{[i]},\mathbf {x}_{2}^{[i]},\mathbf {x}_{3}^{[i]},\ldots ,\textbf {x}_{m_{i}}^{[i]}\right \}\) are mi closest points of \(\textbf {x}_{k}^{[i]}\) in sub domain Ωi.
The numerical approximation of u(x, tn) in local interpolation form can be given as
where {λj} and {γj} are unknown coefficients at n th time level, ϕ is considered radial basis function, ∥⋅∥ is the Euclidean norm, and \(\{p_{j}(x)\}_{j=1}^{l}\) denotes basis for the \(l= \binom {m-1+d}{m-1}\) dimensional linear space of d-variate polynomials of total degree ≤ m − 1. The interpolation condition on sub-domain Ωi
is supported with extra l regularization conditions
Imposing conditions (29)–(30) on \(\hat {u}(\textbf {x},t_{n})\), at each stencil, we obtain following linear system
where \({\varPhi }:=\left [\phi \|\textbf {x}_{j}^{[i]}-\textbf {x}_{k}^{[i]}\|\right ]_{1\leq j,k \leq m_{i}}\), \(P:= \left [p_{k}(\textbf {x}_{j}^{[i]})\right ]_{1\leq j \leq m_{i}, 1 \leq k \leq l}\).
The above system can be written in matrix form as
where \({\varLambda }_{\varOmega _{i}}^=[\lambda _{1},\ldots ,\lambda _{m_{i}},\gamma _{1},\ldots ,\lambda _{l}]^{\intercal }\), \(U_{\varOmega _{i}}^{n}=\left [u(\textbf {x}_{1}^{[i]},t_{n}),\ldots ,u\left (\textbf {x}_{m_{i}}^{[i]},t_{n}\right ),0,\ldots ,0\right ]^{\intercal }\), and \(A_{\varOmega _{i}}\) is coefficient matrix of the system (31).
Suppose ϕ is a conditionally positive definite function of order m on \(\mathbb {R}^{d}\) and the points \(\varOmega _{i}=\{x_{1}, x_{2},{\ldots } ,x_{n_{i}}\}\) form (m − 1) unisolvent set of centers. Then the system (31) is uniquely solvable.
For a linear differential operator \({\mathcal{D}}\), at each stencil \(\textbf {x}_{k}^{[i]} \in {\varOmega _{i}}\), we have approximation for \({\mathcal{D}}u(\textbf {x},t_{n})\) as;
where \({\Psi }_{\varOmega _{i}}=\left [ \phi \left (\| \textbf {x}_{k}^{[i]}-\textbf {x}_{1}^{[i]}\|\right ),\ldots , \phi \left (\|\textbf {x}_{k}^{[i]}-\textbf {x}_{m_{i}}^{[i]}\|\right ), p_{1}\left (\textbf {x}_{k}^{[i]}\right ), \ldots p_{l}\left (\textbf {x}_{k}^{[i]}\right )\right ]\). For each k, the local operator \({\mathcal{D}}{\Psi }_{\varOmega _{i}} A_{\varOmega _{i}}^{-1}\) is a 1 × mi row vector.
Now for each collocation points xi ∈Ω, applying the local collocation method described through (33) to the linear operator \({\mathcal{L}}\) defined in (18), we have
For each arbitrary i, the \({\mathcal{L}}{\Psi }_{\varOmega _{i}} A_{\varOmega _{i}}^{-1}\) is a 1 × mi row vector, that going to store in M × M matrix, by filling extra spaces by zeros. Thus, we have following linear system
The resulting system is sparse having only mi nonzero entries in each rows, and hence can be calculate efficiently.
4 Numerical simulation and discussion
In this section, we present several numerical experiments to illustrate the efficiency and accuracy of proposed method. The accuracy of the proposed method is measured against two different error measurement viz maximum absolute error \(\text {L}_{\infty }\), and root mean square error Lrms, defined by using following definition
where u(xi, T) and U(xi, T) represent analytical and numerical solution and M is number of collocation points inside the domain Ω.
Since accuracy of RBF-based methods is highly influenced by shape parameter 𝜖, choosing an optimal value of 𝜖 is itself a crucial task. To overcome this complication, we will use the second-order thin plate spline \(r^{2 \beta } \ln (r)\), with β = 2, in our all numerical experiments; however, a higher-order function can be used for better accuracy. To show the efficiency of meshless nature of the proposed method, some irregular domain is also considered (see Fig. 1). The boundary Γk of irregular domain Ωk, for k = 1,2 is defined by the parametric equations

The considered irregular domains for two-dimensional test problem
Now we will deal with some numerical experiments for validating our proposed method. We consider two different cases as
Example 1
Consider following test problem
The initial conditions and boundary conditions are extracted from the analytic solutions
The linear source terms read \(f(x,y,t)=\left (\frac {2t^{2-\alpha }}{{\varGamma }(3-\alpha )}+2t^{2}\right )\sin \limits (x+y)+F(u(x,y,t))\).
First, we deal for case I, the Sine-Gordon equation. We solve the present problem in the computation domain [− 1,1]2, with 21 × 21 uniform points for different values of α and δt. The computational results for thin plate spline \(r^{4}\ln r\) with m = 5 are reported in Table 1. In Fig. 2, we plotted the numerical solution and absolute error at T = 1.

Numerical solution and absolute error at T = 1 for α = 1.25, and N = 441 on domain [− 1,1]2 for Example 1 with case I
We also extended the same numerical experiment setup on the irregular domain Ω1 and Ω2. The numerical results for computational domain Ω1 with 645 internal points and 70 boundary points that is total collocation points M = 715 and m = 9 are reported in Table 2. Finally, in Table 3, we did same numerical experiment on experimental domain Ω2. In this numerical experiment, we considered 798 internal points and 90 boundary points.
From all these tables, we can conclude that both errors are decreasing as δt decreases and experimental convergence in time is approximate to \(\mathcal {O}(\delta t)\). Finally, we also compared our method with collocation method presented by Dehghan et al. [12] and comparison results are reported in Table 4. From the table, we can observe that method presented in [12] is accurate up to three decimal place using 320 temporal points, although the proposed method reached better accuracy only in 160 temporal points.
Now we extended our numerical experiments for same test problem with case II, the Klein Gordon equations. We did same numerical experiments on domain [0,1]2 with 21 × 21 and two different errors for different values of α are reported in Table 5. Finally, In Fig. 3, we plotted absolute error for different values of time and α for test case II.

Numerical solution and absolute error at T = 1 for α = 1.3, for Example 1 and test case II
Example 2
Consider following test problem
The initial conditions and boundary conditions are extracted from the analytic solutions
The source terms is \(f(x,y,t)=\left (\frac {{\varGamma }(4+\alpha )}{6}t^{3}+2 \pi ^{2}t^{3+\alpha }\right )\cos \limits (\pi x)\cos \limits (\pi y) +F(u(x,y,t))\).
We solve the present problem in the computation domain [0,1]2, with 41 × 41 uniform points for different values of α and δt. The computational results with m = 5 are reported in Table 6.
The graph of numerical approximation of the solution and absolute error is plotted in Fig. 4 respectively. From Table 6, we can observe that for this test problem, also experimental convergence in time achieved is approximate to \(\mathcal {O}(\delta t)\).

Numerical solution and absolute error for α = 1.8, at T = 1s on domain [0,1]2 for Example 2 with case I
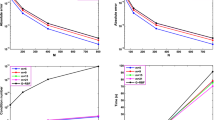
We are now extended our experiment to solve case II, and the experimental data are reported in Table 7. From the table, we observe the convergence achieved in time is approximate to \(\mathcal {O}(\delta t)\). Finally, in Fig. 5, we plotted absolute errors at different values of α.

Absolute error at time T = 1s for different values of α = 1.25 and α = 1.75, on domain [0,1]2 for Example 2 with case II
Example 3
Consider following test problem
The initial conditions and boundary conditions are extracted from the analytic solutions
The source terms is \(f(x,y,t)=\left (\frac {2t^{2-\alpha }}{{\varGamma }(3-\alpha )} + t^{2} \frac {4}{\beta }-t^{2}\frac {4(x-0.5)^{2}}{\beta ^{2}}-t^{2}\frac {4(y-0.5)^{2}}{\beta ^{2}} \right )\) \(e^{\frac {-(x-0.5)^{2}-(y-0.5)^{2}}{\beta }} +F(u(x,y,t))\).
This example is adopted from Dehghan et al. [8]. In [8], consider this example to validate the element-free Galerkin method for numerical solution of 2D fractional Tricomi-type equation. The proposed problem is solved in computational domain [0,1]2, with 55 × 55 spatial points for different values of α. The different error at time T = 1 s with β = 0.1 is reported in Tables 8 and 9, for Sine Gordon and Klein Gordon equations respectively. From the table, we observe the convergence achieved in time is approximate to \(\mathcal {O}(\delta t)\). Finally, in Fig. 6, we present the graphs of approximate solution and absolute error using the proposed method for α = 1.8, δt = 0.001, and β = 0.005 for 80 × 80 spatial points at time T = 1 s.

Graph of numerical solution and absolute error for Example 2 with case II
5 Conclusion
In this work, we have employed the radial basis function-based meshless local collocation method for the numerical solution of time fractional nonlinear diffusion wave equation. Basically we solve two family of equations sine Gordon and Klein Gordon equation. The time semi-discretization was done by finite difference method and spatial discretization was done by meshless method. To overcome the stability issue due to shape parameter, the thin plate spline is used as basis of the collocation method. The numerical experiments for different values of α are carried out. Numerical methods are employed on both regular and irregular domain. Numerical results show that the computation order of convergence in time is close to theoretical order.
References
Bagley, R.L., Torvik, P.: A theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 27(3), 201–210 (1983)
Bhrawy, A., Abdelkawy, M.: A fully spectral collocation approximation for multi-dimensional fractional schrödinger equations. J. Comput. Phys. 294, 462–483 (2015)
Cen, Z., Huang, J., Xu, A., Le, A.: Numerical approximation of a time-fractional black–scholes equation. Comput. Math. Appl. 75(8), 2874–2887 (2018)
Chandhini, G., Prashanthi, K., Vijesh, V.A.: A radial basis function method for fractional darboux problems. Engineering Analysis with Boundary Elements 86, 1–18 (2018)
Chen, W., Ye, L., Sun, H.: Fractional diffusion equations by the kansa method. Comput. Math. Appl. 59(5), 1614–1620 (2010)
De Staelen, R., Hendy, A.S.: Numerically pricing double barrier options in a time-fractional black–scholes model. Comput. Math. Appl. 74(6), 1166–1175 (2017)
Dehghan, M., Abbaszadeh, M.: Analysis of the element free galerkin (efg) method for solving fractional cable equation with dirichlet boundary condition. Appl. Numer. Math. 109, 208–234 (2016)
Dehghan, M., Abbaszadeh, M.: Element free galerkin approach based on the reproducing kernel particle method for solving 2d fractional tricomi-type equation with robin boundary condition. Comput. Math. Appl. 73(6), 1270–1285 (2017)
Dehghan, M., Abbaszadeh, M.: Two meshless procedures: moving kriging interpolation and element-free galerkin for fractional pdes. Appl. Anal. 96(6), 936–969 (2017)
Dehghan, M., Abbaszadeh, M.: The use of proper orthogonal decomposition (pod) meshless rbf-fd technique to simulate the shallow water equations. J. Comput. Phys. 351, 478–510 (2017)
Dehghan, M., Abbaszadeh, M.: An efficient technique based on finite difference/finite element method for solution of two-dimensional space/multi-time fractional bloch–torrey equations. Appl. Numer. Math. 131, 190–206 (2018)
Dehghan, M., Abbaszadeh, M., Mohebbi, A.: An implicit rbf meshless approach for solving the time fractional nonlinear sine-gordon and klein–gordon equations. Engineering Analysis with Boundary Elements 50, 412–434 (2015)
Dehghan, M., Abbaszadeh, M., Mohebbi, A.: A meshless technique based on the local radial basis functions collocation method for solving parabolic–parabolic patlak–keller–segel chemotaxis model. Engineering Analysis with Boundary Elements 56, 129–144 (2015)
Dehghan, M., Abbaszadeh, M., Mohebbi, A.: Analysis of a meshless method for the time fractional diffusion-wave equation. Numerical Algorithms 73(2), 445–476 (2016)
Dehghan, M., Manafian, J., Saadatmandi, A.: Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numerical Methods for Partial Differential Equations: An International Journal 26(2), 448–479 (2010)
Dehghan, M., Mohammadi, V.: Two-dimensional simulation of the damped kuramoto–sivashinsky equation via radial basis function-generated finite difference scheme combined with an exponential time discretization. Engineering Analysis with Boundary Elements 107, 168–184 (2019)
Dehghan, M., Safarpoor, M., Abbaszadeh, M.: Two high-order numerical algorithms for solving the multi-term time fractional diffusion-wave equations. J. Comput. Appl. Math. 290, 174–195 (2015)
Dehghan, M., Shokri, A.: A numerical method for solution of the two-dimensional sine-gordon equation using the radial basis functions. Math. Comput. Simul. 79(3), 700–715 (2008)
Gao, G.H., Sun, Z.Z., Zhang, Y.N.: A finite difference scheme for fractional sub-diffusion equations on an unbounded domain using artificial boundary conditions. J. Comput. Phys. 231(7), 2865–2879 (2012)
Ghehsareh, H.R., Bateni, S.H., Zaghian, A.: A meshfree method based on the radial basis functions for solution of two-dimensional fractional evolution equation. Engineering Analysis with Boundary Elements 61, 52–60 (2015)
Ghehsareh, H.R., Zaghian, A., Raei, M.: A local weak form meshless method to simulate a variable order time-fractional mobile–immobile transport model. Engineering Analysis with Boundary Elements 90, 63–75 (2018)
Golbabai, A., Nikpour, A.: Computing a numerical solution of two dimensional non-linear schrödinger equation on complexly shaped domains by rbf based differential quadrature method. J. Comput. Phys. 322, 586–602 (2016)
Gu, Y., Zhuang, P.: Anomalous sub-diffusion equations by the meshless collocation method. Aust. J. Mech. Eng. 10(1), 1–8 (2012)
Gu, Y., Zhuang, P., Liu, Q.: An advanced meshless method for time fractional diffusion equation. Int. J. Comput. Methods 8(04), 653–665 (2011)
Hosseini, V.R., Chen, W., Avazzadeh, Z.: Numerical solution of fractional telegraph equation by using radial basis functions. Engineering Analysis with Boundary Elements 38, 31–39 (2014)
Hosseini, V.R., Shivanian, E., Chen, W.: Local radial point interpolation (mlrpi) method for solving time fractional diffusion-wave equation with damping. J. Comput. Phys. 312, 307–332 (2016)
Jin, B., Lazarov, R., Liu, Y., Zhou, Z.: The galerkin finite element method for a multi-term time-fractional diffusion equation. J. Comput. Phys. 281, 825–843 (2015)
Kumar, A., Bhardwaj, A., Kumar, B.V.R.: A meshless local collocation method for time fractional diffusion wave equation. Comput. Math. Appl. 78(6), 1851–1861 (2019)
Liu, Q., Liu, F., Turner, I., Anh, V., Gu, Y.: A rbf meshless approach for modeling a fractal mobile/immobile transport model. Appl. Math. Comput. 226, 336–347 (2014)
Mardani, A., Hooshmandasl, M., Heydari, M., Cattani, C.: A meshless method for solving the time fractional advection–diffusion equation with variable coefficients. Comput. Math. Appl. 75(1), 122–133 (2018)
Mohebbi, A., Abbaszadeh, M., Dehghan, M.: The use of a meshless technique based on collocation and radial basis functions for solving the time fractional nonlinear schrödinger equation arising in quantum mechanics. Engineering Analysis with Boundary Elements 37(2), 475–485 (2013)
Mohebbi, A., Abbaszadeh, M., Dehghan, M.: Solution of two-dimensional modified anomalous fractional sub-diffusion equation via radial basis functions (rbf) meshless method. Engineering Analysis with Boundary Elements 38, 72–82 (2014)
Nagy, A.: Numerical solution of time fractional nonlinear klein–gordon equation using sinc–chebyshev collocation method. Appl. Math. Comput. 310, 139–148 (2017)
Quarteroni, A., Valli, A.: Numerical approximation of partial differential equations, vol. 23. Springer Science & Business Media (2008)
Salehi, R.: A meshless point collocation method for 2-d multi-term time fractional diffusion-wave equation. Numerical Algorithms 74(4), 1145–1168 (2017)
Sarra, S.A.: A local radial basis function method for advection–diffusion–reaction equations on complexly shaped domains. Appl. Math. Comput. 218(19), 9853–9865 (2012)
Sun, H., Liu, X., Zhang, Y., Pang, G., Garrard, R.: A fast semi-discrete kansa method to solve the two-dimensional spatiotemporal fractional diffusion equation. J. Comput. Phys. 345, 74–90 (2017)
Sun, Z.Z., Wu, X.: A fully discrete difference scheme for a diffusion-wave system. Appl. Numer. Math. 56(2), 193–209 (2006)
Tayebi, A., Shekari, Y., Heydari, M.: A meshless method for solving two-dimensional variable-order time fractional advection–diffusion equation. J. Comput. Phys. 340, 655–669 (2017)
Uddin, M., Haq, S.: Rbfs approximation method for time fractional partial differential equations. Commun. Nonlinear Sci. Numer. Simul. 16(11), 4208–4214 (2011)
Vong, S., Wang, Z.: A compact difference scheme for a two dimensional fractional klein–gordon equation with neumann boundary conditions. J. Comput. Phys. 274, 268–282 (2014)
Yan, L., Yang, F.: Efficient kansa-type mfs algorithm for time-fractional inverse diffusion problems. Comput. Math. Appl.s 67(8), 1507–1520 (2014)
Yang, J., Zhao, Y., Liu, N., Bu, W., Xu, T., Tang, Y.: An implicit mls meshless method for 2-d time dependent fractional diffusion–wave equation. Appl. Math. Model. 39(3-4), 1229–1240 (2015)
Zeng, F., Zhang, Z., Karniadakis, G.E.: Fast difference schemes for solving high-dimensional time-fractional subdiffusion equations. J. Comput. Phys. 307, 15–33 (2016)
Zhuang, P., Gu, Y., Liu, F., Turner, I., Yarlagadda, P.: Time-dependent fractional advection–diffusion equations by an implicit mls meshless method. Int. J. Numer. Methods Eng. 88(13), 1346–1362 (2011)
Acknowledgements
We would like to thank reviewers for their comments and suggestions that really improved the quality of the paper.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kumar, A., Bhardwaj, A. A local meshless method for time fractional nonlinear diffusion wave equation. Numer Algor 85, 1311–1334 (2020). https://doi.org/10.1007/s11075-019-00866-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11075-019-00866-9