
Abstract
In the present paper, a new (3 + 1)-dimensional Schrödinger equation in Quantum Mechanics is derived. Based on the extended (3 + 1)-dimensional zero curvature equation, this equation is derived for the first time via the compatibility condition. Meanwhile, some soliton solutions are presented. Finally, conservation laws also obtained.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear evolution equations play a very important role in many fields, as many nonlinear phenomena can be described by them. It is well-known that many scientific application fields exist a rich variety of nonlinear phenomena. Studying the analytical solutions of these equations becomes a hot research topic. Various systematic methods have been proposed and developed to seek analytical solutions of NLEEs. For example, some of the most important approaches are inverse scattering transformation [1], Hirotas bilinear direct method [2], B\(\ddot{a}\)cklund transformation [3], Darboux transformations [4, 5], generalized multi-symplectic method [6,7,8,9], Lax pairs [10], symmetry method [11,12,13,14,15,16,17,18,19], auxiliary function method [20, 21], and other methods. These methods have powerful features that perform it practical for dealing with a great many of nonlinear evolution equations.
The nonlinear Schr\(\ddot{o}\)dinger equation (NLSE) [1] is widely considered as a general mathematical model to describe the evolution of slow wave packets in general nonlinear wave systems. It plays an important role in nonlinear optics, condensed state physics and other physical sciences. With the development of science and technology and the continuous deepening of research, we need to use more complex equations to describe the nonlinear phenomena in reality. Therefore, equations have been extended on the basis of standard form of NLSE, which includes variable coefficients, high order, multi-dimensional, non-local, fractional order and their combined forms.
Recently, Wang [22] considered a new (3 + 1)-dimensional sine-Gordon and sinh-Gordon equation from extended (3 + 1)-dimensional zero curvature equation. Also, Wang et al. [13] studied a new (2 + 1)-dimensional sine-Gordon and sinh-Gordon equation. In paper [23], they get almost-periodic solutions of the (2 + 1)-dimensional three-wave equation. In paper [24], they derive Schr\(\ddot{o}\)dinger equation and give some analytic solutions. In paper [17], a (2 + 1)-dimensional KdV and mKdV equation are derived from positive case. In this paper, we try to derive a (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation via extended (3 + 1)-dimensional zero curvature equation. In fact, this paper is a continuous paper of the previous ones [13, 17, 22].
This paper is mainly divided into the following parts to carry out research; in the second section, we derived the (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation from the extended zero curvature equation. In the third section, some soliton solutions and analytic solutions are obtained. In the last section, some conclusions of this paper are displayed.
2 Derivation of the new (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation
Recently, Wang [22] from the following Lax pairs compatibility equation,
where \(\varphi \) is function of x, y, z and t. \(\varphi \) is an n-dimensional vector and M and N are \(n\times n\) matrices. Wang [22] considered \(\varphi _{zt}=\varphi _{tz}\) and derived the following (3 + 1)-dimensional zero curvature equation
where \([M,N]=MN-NM\), and M, N are [1, 13, 17, 22, 24]
where A, B, C and D are scalar functions of \(q(x, y,z,t), r(x,y,z, t)\), and their derivatives, and \(\zeta \), where q, r are functions of x, y, z, t, \(\zeta \) is the spectral parameter. Substituting (3) into (2), one can find \(D=-A\), and one can have
In general, it is difficult to solve these equations. Since \(\zeta \) is the eigenvalue and it is a free parameter, in order to solve A, B and C, by seeking finite power series expansions. In this paper, unlike the previous work [22], we consider positive case for \(n=2\), one can get
Putting (5) into (4) and from the second and third equation of Eq. (4), from the coefficients of \(\zeta ^3\) immediately generates \(b_2=c_2=0.\) Thus, we rewrite Eq. (5) as follows
Substituting Eq. (6) into Eq. (4), from the different coefficients of \(\zeta \), we can obtain
Finally, let \(r=q^{*}\), and then we get the new (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation as follows
To eliminate items \(q_x\) and \(q_y\), consider the transformation \(q(x,y,z,,t)=U(\xi ,\eta ,\tau ,Z),\xi =x+t,\eta =y+t,\tau =t,Z=z\), substitute them into Eq. (8), one can get
In order to write in a common form, we rewrite Eq. (9) as follows (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation
In the following Sections, we will study Eq. (10).
3 Symmetries analysis and analytical solutions of the new (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation
3.1 Symmetry analysis for transformation \(u=p+iq\)
In order to get the Lie point symmetry of Eq. (10), assume that \(u=p+iq\), where p(x, y, z, t), q(x, y, z, t) are real functions. By separating the real and imaginary parts of this equation, we can obtain the following system of equations
For the vector fields [11,12,13,14,15,16,17, 22]
and
On the basis of the symmetry method (For more details refer to Refs. [11, 12]), applying the second prolongation \(pr^{(2)}V\) to (11) and (12), and get
where
and \(pr^{(2)}\) is the second prolongation
Thus, the infinitesimal criterion reads as follows
where
and so on. \(D_i\) express the total derivative operator.
Lastly, we get the following results
where \(F_i(i=1,2,3\cdots 11\) are functions of \((-x+y,x+z)\).
3.2 Symmetry analysis for transformation \(u=Pe^{i\phi }\)
First, consider the following hypothesis
where P(x, y, z, t) is the shape of the pulse and \(\phi (x,y,z,t)\) represents the phase portion of the solutions [25]. In this way, one separates real and imaginary parts; one can get
3.3 Symmetry analysis (26) and (27)
In this subsection, once again, we consider (26) and (27) using symmetry method. Repeat previous steps, we can get
where \(c_i(i=1,2,3,4,5,6,7)\) are arbitrary constants. Therefore, we obtain following infinitesimal generators
where
From (30), one can get one-parameter groups \(G_{i}\),
It is clear that all of them are symmetry group; this implies that if \(P= f(x,y,z, t),g(x,y,z,t)=\varphi \) are solutions of the new Schr\(\ddot{o}\)dinger equation, the following functions also are solutions of (10)
From above analysis, one can see that if we choose different transformation, we get different vector fields.
3.4 Soliton solutions of the new (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation
3.4.1 Soliton solutions
In general, the wave number of the solution should be constant quantity, that is to say, \(\phi _{xx},\phi _{yy},\phi _{xy},\phi _{xz},\phi _{yz}\) and \(\phi _{zz}\) should be equal to zero. Therefore, Eqs. (26), (27) reduced to
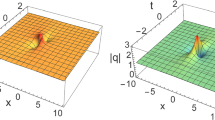
3.4.2 Bright solutions
In order to get solutions, let us consider the following hypothesis [25, 26]
where
and the phase of solutions is given by
A is the amplitude, \(B_i(i=1,2,3)\) is the inverse width and v is the velocity of the solutions, respectively, the wave number are given by \(k_1,k_2\) and \(k_3\), \(\omega \) is the frequency, the center of the phase represents \(\theta \), for more details see [25, 26].
Substituting (35) into (33) and (34), one can get
and
From Eq. (38), one can derive
Now, consider Eq. (39), we find that the exponents 3p and \(p+2\) should be equal. Thus, one can have \( p=1. \) Therefore, from Eq. (39) we derive
Thus, from the condition it requires that \(\left( 4B_2B_3+4B_1B_3-4B_1B_2-2B_3^2-2B_2^2-2B_1^2\right) >0\). Finally, the bright soliton solution of (10) is given by
the relation the amplitude A and width B, the frequency \(\omega \) are presented by (41). The velocity v is decided by (40). Only when these conditions are satisfied, the solutions can exist.
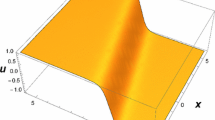
3.4.3 Dark solutions
Let us assume the following hypothesis [25, 26]
where \(\tau \) also is Eq. (36).
Inserting (43) into (10), one can derive
and
For v, we also get the same value as the dark solutions,
Balancing the exponents 3p and \(p+2\), one can also arrive at \( p=1. \) If we repeat the previous steps, we can get,
For A, it is easy to see that this is just a minus sign from the previous one. Therefore, condition (47) requires \(-4B_2B_3-4B_1B_3+4B_1B_2+2B_3^2+2B_2^2-2B_1^2>0\). Finally, we get the dark solution of (10)
the amplitude A and width \(B_i(i=1,2,3)\) are linked by (47), the frequency \(\omega \) is shown (47). The velocity v is decided by (46).
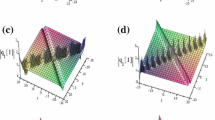
3.4.4 Complexitons
By employing the following assumption [25, 26]
where \(f(\xi )=f(l_1x+l_2y+l_3z-vt+\theta _1)\) is a real function. Putting (49) into (10), we have
where \(Z_1=-l_1^2-l_2^2-l_3^2-2l_1l_2+2l_1l_3+2l_2l_3\), \(Z_3=-\beta +\alpha _1^2+\alpha _2^2+\alpha _3^2+2\alpha _1\alpha _2+2\alpha _1\alpha _3-2\alpha _2\alpha _3\), \(Z_2=-iv-2i\alpha _1l_1-2i\alpha _2l_2-2i\alpha _3l_3-2i\alpha _2l_1-2i\alpha _1l_2+2i \alpha _3l_1+2i\alpha _1l_3+2i\alpha _3l_2+2i\alpha _2l_3\). Since f is a real value function, therefore \(Z_2=0\). In other words, \(v=-2\alpha _1l_1-2\alpha _2l_2-2\alpha _3l_3-2\alpha _2l_1-2\alpha _1l_2 +2\alpha _3l_1+2\alpha _1l_3+2\alpha _3l_2+2\alpha _2l_3\). So, Eq. (50) reduced to
this equation has many solutions, such as
if \(k\longrightarrow 1\), one can get \( f(\xi )=\pm \sqrt{\frac{-Z_3}{2}}\tanh \left( \sqrt{\frac{Z_3}{2Z_1}}(\xi -\xi _0)\right) , \) and
if \(k\longrightarrow 1\), one can get \( f(\xi )=\pm \sqrt{{-Z_3}}{{\,\mathrm{sech}\,}}\left( \sqrt{\frac{-Z_3}{Z_1}}(\xi -\xi _0)\right) \). We have get many other forms of solutions, we do not list all of them. Finally, we can get analytic solutions of Eq. (10)
if \(k\longrightarrow 1\), we have \( u(x,y,z,t)=\pm \sqrt{\frac{-Z_3}{2}}\tanh \left( \sqrt{\frac{Z_3}{2Z_1}}(\xi -\xi _0)\right) e^{i(\alpha _1x+\alpha _2y+\alpha _3z+\beta t+\theta _0)}, \) and
if \(k\longrightarrow 1\), one obtains \( u(x,y,z,t)=\pm \sqrt{{-Z_3}}{{\,\mathrm{sech}\,}}\left( \sqrt{\frac{-Z_3}{Z_1}}(\xi -\xi _0)\right) e^{i(\alpha _1x+\alpha _2y+\alpha _3z+\beta t+\theta _0)}. \)
4 Conservation laws
Based on the conservation law multiplier method [12], using the transformation \(u(x,y,z,t)=p(x,y,z,t)+iq(x,y,z,t)\), we get
Therefore, for the following multiplier, we should get
where \(F_4(-x+y,y+z)\) is arbitrary function \((-x+y,y+z)\), \(F_3(y+z)\) is arbitrary function \((y+z)\). Therefore, we get the following statement
Theorem 1
Equation (56) possess a conservation law for multiplier \(\varLambda _1=-F_3q_x, \varLambda _2=F_3p_x\),
Equation (56) has a conservation law for multiplier \(\varLambda _1=F_4p, \varLambda _2=F_4q\),
5 Conclusions
In the present paper, based on the (3 + 1)-dimensional zero curvature equation, we have derived a new (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation. Moreover, from compatibility conditions, we obtained that (3 + 1)-dimensional zero curvature equation and then derived this equation from the positive case. Subsequently, we get two systems of partial differential equations with two different types of transformations. Meanwhile, we studied these two systems by the Lie group method, and we obtained their symmetries and infinitesimal operators. Simultaneously, we find that if we choose different transformations, we get different symmetries. According to different infinitesimal operators, this equation can be reduced to the (2 + 1)-dimensional Schr\(\ddot{o}\)dinger equation in literature [24], and of course it can be further reduced to the classical (1+1)-dimensional Schr\(\ddot{o}\)dinger equation by using Lie groups again. Furthermore, some soliton solutions and analytic solutions are derived, including bright solutions and dark solutions, Jacobi elliptic function solutions, and so on. In addition, some conservation laws are also given based on the multiplier method.
This paper only derived the equation and shows some analytical solutions, but there are still many issues to be reported, such as using Hirota bilinear method to study more soliton solutions, studying the B\(\ddot{a}\)cklund transformation and Darboux transformation of the new (3 + 1)-dimensional Schr\(\ddot{o}\)dinger equation. In addition, the fractional order version, the discretization as well as variable coefficients cases of the equation will be presented in future research papers.
References
Ablowitz, M.J., Segur, H.: Solitons and the Inverse Scattering Transform. SIAM, Philadelphia (1981)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Rogers, C., Schief, W.K.: B\(\ddot{a}\)cklund and Darboux Transformations, Geometry and Morden Applications in Soliton Theory. Cambridge University Press, Cambridge (2002)
Gu, C.H., Hu, H.S., et al.: Darboux Transformations in Integrable Systems Theory and Their Applications to Geometry. Springer, Berlin (2005)
Hu, X.B., Zhu, Z.N.: A B\(\ddot{a}\)cklund transformation and nonlinear superposition formula for the Belov–Chaltikian lattice. J. Phys. A. 31, 4716–4755 (1998)
Hu, W.P., et al.: Symmetry breaking of infinite-dimensional dynamic system. Appl. Math. Lett. 103, 106207 (2020)
Hu, W.P., Zhang, C.Z., Deng, Z.C.: Vibration and elastic wave propagation in spatial flexible damping panel attached to four special springs. Commun. Nonlinear Sci. Numer. Simul. 84, 105199 (2020)
Hu, W.P., Ye, J., Deng, Z.C.: Internal resonance of a flexible beam in a spatial tethered system. J. Sound Vib. 475, 115286 (2020)
Hu, W.P., et al.: Coupling dynamic behaviors of flexible stretching hub-beam system. Mech. Syst. Signal Proc. 151, 107389 (2021)
Lax, P.D.: Integrals of nonlinear equations of evolution and solitary waves. Commun. Pure Appl. Math. 21, 467–490 (1968)
Olver, P.J.: Application of Lie Group to Differential Equation. Springer, New York (1986)
Bluman, G.W., Cheviakov, A., Anco, S.: Applications of Symmetry Methods to Partial Differential Equations. Springer, New York (2010)
Wang, G.W., et al.: A (2 + 1)-dimensional sine-Gordon and sinh-Gordon equations with symmetries and kink wave solutions. Nucl. Phys. B 953, 114956 (2020)
Wang, G.W., et al.: (2 + 1)-Dimensional Boiti–Leon–Pempinelli equation—domain walls, invariance properties and conservation laws. Phys. Lett. A 384, 126255 (2020)
Wang, G.W., et al.: Symmetry analysis for a seventh-order generalized KdV equation and its fractional version in fluid mechanics. Fractals 28, 2050044 (2020)
Wang, G.W.: Symmetry analysis and rogue wave solutions for the (2 + 1)-dimensional nonlinear Schrödinger equation with variable coefficients. Appl. Math. Lett. 56, 56–64 (2016)
Wang, G.W., Kara, A.H.: A (2 + 1)-dimensional KdV equation and mKdV equation: symmetries, group invariant solutions and conservation laws. Phys. Lett. A 383, 728–731 (2019)
Wang, G.W.: Symmetry analysis, analytical solutions and conservation laws of a generalized KdV–Burgers–Kuramoto equation and its fractional version. Fractals (2021). https://doi.org/10.1142/S0218348X21501012
Muatjetjeja, B., Mbusi, S.O., Adem, A.R.: Noether symmetries of a generalized coupled Lane–Emden–Klein–Gordon–Fock system with central symmetry. Symmetry 12, 566 (2020)
Adem, A.R.: The generalized (1 + 1)-dimensional and (2 + 1)-dimensional Ito equations: multiple exp-function algorithm and multiple wave solutions. Comput. Math. Appl. 71, 1248–1258 (2016)
Muatjetjeja, B., Adem, A.R., Mbusi, S.O.: Traveling wave solutions and conservation laws of a generalized Kudryashov–Sinelshchikov equation. J. Appl. Anal. 25, 211–217 (2019)
Wang, G.W.: A novel (3 + 1)-dimensional sine-Gorden and sinh-Gorden equation: derivation, symmetries and conservation laws. Appl. Math. Lett. 113, 106768 (2021)
Zhou, Z.: Finite dimensional Hamiltonians and almost-periodic solutions for (2 + 1) dimensional three-wave equations. J. Phys. Soc. Jpn. 71, 1857–1863 (2002)
Latha, M.M., Vasanthi, C.C.: An integrable model of (2 + 1)-dimensional Heisenberg ferromagnetic spin chain and soliton excitations. Phys. Scr. 89, 065204 (2014)
Biswas, A., et al.: Optical solitons and complexitons of the Schrodinger–Hirota equation. Opt. Laser Technol. 44, 2265–2269 (2012)
Tang, G.S., Wang, S.H., Wang, G.W.: Solitons and complexitons solutions of an integrable model of (2 + 1)-dimensional Heisenberg ferromagnetic spin chain. Nonlinear Dyn. 88, 2319–2327 (2017)
Acknowledgements
This work is supported by Natural Science Foundation of Hebei Province of China (No. A2018207030), Youth Key Program of Hebei University of Economics and Business (2018QZ07), Key Program of Hebei University of Economics and Business (2020ZD11), Youth Team Support Program of Hebei University of Economics and Business.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, G. A new (3 + 1)-dimensional Schrödinger equation: derivation, soliton solutions and conservation laws. Nonlinear Dyn 104, 1595–1602 (2021). https://doi.org/10.1007/s11071-021-06359-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06359-6