
Abstract
Based on the state-dependent Riccati equation (SDRE) technique, in this paper, a suboptimal pinning control scheme is proposed to synchronize linearly coupled complex networks. The Lyapunov direct method is used to analyze the stability of the closed-loop control system, where it leads to a LMI criterion for pinning synchronization. It is shown that the time interval for synchronization of the proposed SDRE controllers is faster comparing with the results in the latest literatures. It is also shown that the minimum required coupling weights for the network synchronization in a finite desired time is decreased when some specified nodes in the network are pinned with the SDRE controllers. Based on the proposed criterion for pinned nodes selection, the network performances for different topological structures are investigated and the results are compared. The results indicate that the coupling weights for network synchronization in finite desired time in random Erdos Reiny networks are minimum when the pinned nodes are selected based on the minimum matching theorem. In small-world and scale-free networks, the minimum required coupling weight for network synchronization in finite desired time decreases when the highest degree nodes are pinned.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The performance of the synchronized motion in complex networks has a key role in complex network dynamical behavior [1]. Tuning the coupling weights in a typical complex network can change the error states minimization and final settling time in synchronized motion. It is shown that high coupling weights are needed for the desired performance in synchronized motions. There are several methods to enhance synchronizability of complex networks such as adding or removing some components, changing the link rewiring or tuning the weights [2]. However, the performance of the synchronized motion has not been investigated in these methods. In real networks, it is not logical and practically impossible to change the network topology or the coupling weights to improve the performance of the synchronized motion. An applicable method for global synchronization and its performance improvement is the pinning control. There are two challenging problems in the pinning control methods. The first is the quantity and the types of pinned nodes and the second is the controller scheme method. To answer the first problem, several recent researches have been done based on various controllability meters [3–7]. To answer the second problem, several pinning control schemes are proposed to synchronize the complex networks. Pinning control with error states feedback controllers [8, 9], adaptive controllers [10, 11] and impulsive controllers [12] are among the recent researches. A self-feedback forcing current in some neurons generating a local closed-loop system has also been investigated recently [13]. However, in these recent articles, none of the main performance characteristics including error state minimization, control effort limitation and settling time have been investigated and analyzed. This paper aims to apply state-dependent Riccati equation (SDRE) approach as a pinning control scheme to complex networks for global synchronization and its performance improvement. The method of SDRE has recently been used for control problems involving nonlinear systems [14–16]. This theory is motivated by the fact that, for a linear system, linear quadratic regulator (LQR) approach can be effectively used to obtain control laws.
In this paper, we aim to find relations between complex network structure properties and controlled system performance. Also we aim to find relations between the minimum required coupling weights for network synchronization in finite desired time and controllers parameters. Another target in this paper is the performance analysis of the networks with different topological structures (Erdos Reiny networks [17], small-world networks [18] and scale-free networks [19]), while the SDRE controllers and several pinned nodes selection criteria are used.
This paper is organized as follows: In the second section, some basic definition, preliminaries, assumption and lemmas are outlined. Also error dynamic equation is introduced. In Sect. 3, the SDRE controllers for pinning control scheme are given. The stability analysis and finding synchronization criteria are also presented in this section. An illustrating example is shown in Sect. 4. The pinning control performance analysis for several network models and pinned nodes selection criteria are followed in Sect. 5. This section also includes the comparison between the proposed results with some recent literatures. The final section is the conclusion.
2 Basic definition, preliminaries, assumptions and SDRE controllers
2.1 Basic definition and preliminaries
In this section, some basic definitions, preliminaries and required assumptions on nodes and network structure are presented. A complex network consisting of N identical linearly diffusive coupled nodes with identical n dimensional dynamical system in individuals is described by the following ODE set:
where \(x_i =\left( {x_{i1}, x_{i2},\ldots ,\,x_{in} } \right) ^{T}\in R^{n}\) is the state vector of ith node, \(f_i :\,R^{n}\times \left[ {0,\infty } \right] \rightarrow R^{n}\) is continuously differentiable vector function that represents node dynamic. The coupling matrix \(A=(a_{ij} )\in R^{N\times N}\) represents the topology structure of the network. If node i is connected to node j, then \(a_{ij} =1\); otherwise, \(a_{ij} =0\). \(c_{ij} \) is the coupling weights between node i and node j, \({\varGamma } =( \tau _{ij} )\in R^{n\times n}\) is the inner matrix linking coupled variable. Let some pairs \(({i,j}),1\le i,j\le N\), with \(\tau _{ij} \ne 0\), then the two coupled nodes are linked through their \(i\hbox {th}\) and \(j\hbox {th}\) state variables, respectively. Another form for Eq. (1) is based on Laplacian matrix. The Laplacian matrix of the network, \(L=(l_{ij} )\in R^{N\times N},\,L=D-A,\,D=diag\left\{ {d_1, d_2,\ldots , d_n } \right\} ,\,d_i =\sum _{i=1}^N a_{ij} \), for a connected network is irreducible with eigenvalues \(0=\lambda _1 <\lambda _2 \le \cdots \le \lambda _N \). Here, \(\lambda _2 >0\) is the algebraic connectivity index of the network. For directed networks, however, L is generally asymmetrical, so its eigenvalues are usually complex values. Therefore, the Eq. (1) is rewritten in the following form:
2.2 Assumptions
The following assumptions are considered in the network topology.
-
The dynamics in all nodes are identical.
-
The coupling weights in the network are identical.
-
The adjacency matrix is taken by generating the network topology models.
The next assumption is defined for the dynamics of nodes:
The nonlinear function f(.) is assumed to satisfy the Lipschitz condition; There exists a constant \(\Lambda \) such that \(\Vert f(u)-f(v)\Vert \le \Vert \Lambda u-v\Vert \) holds for any u, \(v\in R^{n}\). In this paper, we assume that \(f_i ({x_i (t),t})\) satisfy the Lipchitz condition.
Base on above assumptions, Eq. (2) is rewritten in the following form:
where, f(.) is a vector function that represents the identical nodes and c is the identical coupling weight between the coupled nodes.
2.3 Synchronized motion and error states equations
A network with Eq. (3) is realized globally synchronization if:
where, \(\Vert .\Vert \) is the Euclidean norm. Let \(s(t)\,\in R^{n}\) be either the desired states, equilibrium point, a periodic orbit (limit cycle) or chaotic orbit, then the problem of pinning controlled synchronization of network (3) is to directly control a fraction of nodes in the network to achieve;
where the homogeneous stationary state vector s(t) satisfies the following equation:
To achieve the goal of the control system, we apply the pinning control strategy on a small fraction \(\delta \,(0<\delta \ll 1)\) of the nodes in the network (3). Suppose that nodes \(i_1, i_{2,},\,\ldots , i_k \) are not under control and nodes \(i_{k+1} ,i_{k+2,},\,\ldots , i_N \) are selected for pinning control. Then the controlled network is described by:
The objective is to find some appropriate controllers \(u_i\in R^{n}\) such that the solutions of the controlled network (7) synchronize with the solution of (6), in the sense that Eq. (5) holds. To find the error dynamical network model, we define the error states as;
Subtracting (7) from (6) yields;
2.4 SDRE controllers
Consider a deterministic, infinite horizon nonlinear optimal regulation (stabilization) problem, such that it is full state observable, time invariant and affine in the input, represented as;
where \(x\in R^{n}\) is the state vector, \(u\in R^{m}\) is the input vector, functions \(g:R^{n}\rightarrow R^{n}\), \(B:R^{n}\rightarrow R^{n\times m}\), and \(B(x)\ne 0\,\,\forall \,x\). Without loss of generality, the origin \(x=0\) is assumed to be an equilibrium point. The minimization of the following infinite time performance index is desired:
The state and input weighting matrices are assumed state dependent such that \(Q:R^{n}\rightarrow R^{n}\) and \(R:R^{n}\rightarrow R^{n\times m}\). It is assumed that Q and R are symmetric and R is positive definite,
Since \(g\,(0) =0\) and \(g(.)\in C^{1}\left( {R^{n}} \right) \), the system (10) is written as;
where \(g(x)=A(x)x\). In Eq. (12), \(A(x)\in R^{n\times n}\) and \(B(x)\in R^{n\times m}\) are state-dependent coefficient (SDC) matrices which bring the nonlinear system described by (10) into a linear-like representation. These matrices are not unique. However, it is advisable to select them such that the matrices A(x) and B(x) are controllable. The state-dependent controllability matrix is;
In order to control the nonlinear system, the above matrix must have full rank for the domain for which the nonlinear system is controlled. Some optimal control problems need constraints that must be applied on state variables or the control input. Choice of weight matrices Q(x) and R(x) plays an important role in satisfying these optimal control problems. Hamiltonian matrix for the optimal control problem is used to solve it. The control input is;
which is the state feedback control input with the following feedback gain:
P(x) is a symmetric state-dependent and positive definite matrix which is given by the solution of algebraic Riccati equations:
Dynamics of the closed-loop system is obtained according to the following equation:
3 Pinning control of the complex network with SDRE controllers
3.1 Extended linearization of the complex network model and controlled network equations
To use the SDRE method, the Eq. (9) must be represented in the form of pseudo-linear given by (12). We use the Jacobin extended linearization for Eq. (9) [20, 21]. To calculate the Jacobin matrix, the following definition hold:
Then, the Jacobin matrix is;
where, \(\bar{A} (e)\in R^{\left( {n\times N} \right) \left( {n\times N} \right) }.\)
The diagonal elements of Jacobin matrix are linearized nodes, and non-diagonal elements are diagonal matrices with Laplacian matrix elements. Thus, the linearized network is represented by a \(\left( {n\times N} \right) \left( {n\times N} \right) \) matrix. Also the pinned nodes are represented by matrix \(\bar{B}(e)\). Therefore, the pseudo-linear form of Eq. (12) is obtained according to the following equation:
According to equations represented in Sect. 2.3, equations of the controlled network with pseudo-linear Eq. (19) with the SDRE controllers are represented as follows;
3.2 Pinning synchronization criterion
The criterion for the stability of synchronized motion of the pinning controlled complex network with the proposed SDRE controllers is discussed here. The Lyapunov direct method is used to analyze the stability of the closed-loop control system with Eqs. (19–23). In the next theorem, pinning synchronization criterion is derived.
Theorem 1
Let assumptions in 2.2 hold, then the controlled network (9) with controllers in (21) is globally synchronized if the following criterion holds;
where \(\otimes \) is the Kronecker product, \(I_N \) is identical matrix and K is calculated by the following equation:
P(e) is a symmetric state-dependent and positive definite matrix which is given by the solution of the algebraic Riccati equation (23).
Proof
Consider the candidate Lyapunov functional:
The derivative of V(t) along the trajectories of (6) is;
Substitution of Eqs. (9) and (21) into (26) gives:
Based on the Lipchitz condition in Sect. 2, Eq. (27) may be written in the following form:
We must have;
By substituting Eq. (21) into (30), the following criterion has been established:
\(\square \)
Corollary 1
The LMI criterion in (30) is simplified based on the lemmas in [8] as;
where, \(\theta =\lambda _{max} \left( {\frac{\varLambda +\varLambda ^{T}}{2}} \right) \), Then, the coupling weight inequality c is;
Remark 1
There are several methods to find the stability condition of the synchronized motion in a complex network [2]. But the value of the above LMI criterion is to present a closed form relation between the network characteristics and the controller parameters.
LMI criterion (32) plays a key role to find the optimal controlled nodes (driver nodes) in the pinning control by the proposed controllers. Any selection of the pinned nodes must satisfy the above LMI criterion. Next section illustrates an example to verify these results.
4 Illustrating example
In this section, we will take a chaotic Lorenz system given as nodes of complex dynamical networks to verify the effectiveness of the proposed scheme. The single Lorenz system is described as follows:
where \(x,\,y\) and z are state variables and \(\sigma ,\,r\) and \(\gamma \) are system parameters. With the three real parameters, \(\sigma =10\), \(r=28\), \(\gamma =8/3\) the system shows chaotic behavior. The coupling configuration matrix is chosen from network topology models. Also we select \(\varGamma =I_3 \). The coupling configuration matrix is shown in Fig. 1:

The network topology and equal adjacency and Laplacian matrix
Initial condition for this example is randomly selected. Therefore, each node in the network has different trajectories due to the chaotic behavior and inherently the network is not synchronized.
4.1 Analysis of the coupling weight effect in the open-loop system
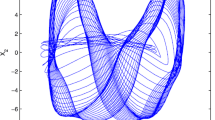
The coupling weights play an important role in the synchronization of the complex network. Generally, increasing the coupling weights improves the synchronization motion of the complex networks. Some researches have been done to investigate the effect of the adaptive coupling weight on the synchronous behavior in a complex network [8, 22, 23]. To investigate the coupling weight effects on the synchronized motion of the complex network, the error states, \(e_{x_{i}}\), of the network in the above example are shown in Fig. 2 for different coupling weights. Similar results are obtained for \(e_{y_i}\), \(e_{z_i} \).

Error states \(e_{x_{i}}\) of uncontrolled network. a \(c=1\), b \(c=4\)
Increasing the coupling weight, the error states converge to zero in finite time and it means that the network is synchronized. This conclusion means that a complex Lorenzian network is synchronized in finite time if there is sufficiently high coupling weight between nodes. In the next subsection, we show that the network synchronization is achieved in finite desired time when the coupling weight is low \((c=1)\) and some nodes are pinned by the proposed controllers.
4.2 Pinning control scheme on the network with SDRE controllers
In this subsection, pinning control of the network in the above example with SDRE controllers is investigated. SDRE parameters are \(Q=I_{12} \) and \(R=I_{12} \). For this example, \(\theta \) is equal 37.5284 [22]. Without loss of generality, we pin node 3 by a single SDRE controllers. To evaluate c in Eq. (32), \(\lambda _\mathrm{max} (L)+\lambda _\mathrm{max} ({R^{-1}(e)\bar{B} ^{T}(e)P(e)} )\,\) is plotted in Fig. 3.

\(\lambda _{\mathrm{max}} (L)+\lambda _{\mathrm{max}} \left( {R^{-1}\left( e \right) \bar{B}^{{T}}\left( e \right) P\left( e \right) } \right) \) versus time
It is shown that the minimum of the eigenvalue is 37.79, therefore the criterion result is \(c>\frac{37.5284}{37.79}>0.993\). We select \(c\,=\,1\) for pinning control of the network. Figure 4 shows how the synchronization error changes over time for SDRE controllers that satisfy the sufficient conditions of Theorem 1.
Results in Fig. 4 show that if we pin some specified nodes in network by SDRE controllers, the network is synchronized in finite desired time with lower coupling weight. This means the performance of the network in synchronization is improved.

Error states \(e_{{x} _{i}},\,e_{{y} _{i}},\,e_{{z} _{i}} \) for \(c=1\) and pin node 3 with SDRE controller
4.3 Comparison between the SDRE and P action controllers
In this subsection, to figure out the ability of the proposed SDRE controllers in pinning control scheme, we compare the performance of the synchronized motion between P action and SDRE controllers in pinning control scheme. Results for pinning control with P action can be found in [8]. The P action controllers are;
Let us apply the pinning control with P action to the network. The criterion of the synchronized motion for P action is,
By selecting node 3 to pin by this controllers, the minimum coupling weight to synchronize the network is \(c>\frac{37.5284}{11.1261}>3.3730\). Figure 5 shows how the synchronization error changes over time for pinning control with P action to satisfy the sufficient conditions of Eq. (34).

Error states \({e}_{{x} _{i}},\,{e}_{{y} _{i}},\,{e}_{{z} _{i}} \) for \({c}=3.3730\) and pin node 3 with P action controllers
To compare the performance of the pinning control scheme with two proposed controllers, error states are shown in Fig. 6 for equal coupling weight, \({c}=1\) and pin node 3 with P action controller.

Error states \({e}_{{x} _{i}},\,{e}_{{y} _{i}},\,{e}_{{z} _{i}}\) for \({c}=1\) and pin node 3 with P action controller
Figures 4 and 6 show that the settling time for synchronization with the P action is about 20 s, while it reduces to 14 s with SDRE controllers. To complete the comparison between the two proposed controllers, the control efforts are shown in Fig. 7 for SDRE controllers and in Fig. 8 for P action controllers.

Control efforts \({u}_{x},\,{u}_{y},\,{u}_\mathrm{z} \) for \({c}=1\) and pin node 3 with P action controller
These figures show that, the control efforts in SDRE controllers are lower than P action controllers when the node 3 is pinned and the coupling weight is \(c=1\). That means the pinning control with the proposed SDRE controllers has better performance on both finite settling time and control effort.
In the next section, the effect of the pining node selection methods on the performance of synchronized motion is investigated.

Control efforts \({u}_{x},\,{u}_{y},\,{u}_{z}\) for \({c}=1\) and pin node 3 with SDRE action controller
5 Analysis of the SDRE pinning control performance for two pinned nodes selection methods
In this section, SDRE pinning control performance for several pinned nodes selection method is investigated. First, the network topology is generated by three conventional models (Erdos Reiny, small world and scale free). Some recent works to select the driver nodes in complex networks include: centrality-based methods [24], maximum matching method [4], gramian-based method [7] and optimal pinning controllability method [25]. In this paper, the two approaches of centrality-based and maximum matching methods have been selected for each network. For each selected method, the minimum coupling weight that is required to synchronize the network at the desired finite time is calculated. The procedure is as follows:
Given Node dynamics, network topology, pinned nodes selection method, desired finite time, SDRE controller’s parameters.
Find Minimum coupling weight to synchronize the network for given data.
5.1 Illustrating example
In this example, a Lorenzian network with 10 nodes is selected. Desired finite time to synchronization is \(t_s =14\,\mathrm{s}\). SDRE controllers parameters are \(Q=I_{10} \) and \(R=I_{10} \). Results for Erdos Reiny network are shown in Table 1. Results for small-world and scale-free networks are shown in Tables 2 and 3.
In Erdos Reiny networks, the minimum coupling weight to synchronize the network in desired finite time is minimum when maximum matching theory is used to identify pinned nodes. In small-world and scale-free networks, the minimum coupling weight to synchronize the network in desired finite time is minimum when nodes with high-degree centrality criterion are used to identify pinned nodes.
6 Conclusion
In this paper, the pinning control scheme is proposed to synchronize linearly coupled complex network where a suboptimal control is used based on the state-dependent Riccati equation (SDRE). The stability analysis of the controlled network leads to a LMI criterion for pinning synchronization. The performance of the controlled network in the synchronized motion has been investigated for several network topology models and several pinned node selection methods. It is shown that the minimum required coupling weight for network synchronization in finite desired time is decreased when some special nodes in the network are pinned with SDRE controllers. Also it is shown that the duration for the synchronization and control efforts of the proposed SDRE controllers is lower comparing with the latest results in P action controllers. The performance analysis of the networks with different topological structures has been investigated while the pinned nodes selection criteria are used. Results shows that in random Erdos Reiny networks, the coupling weight is minimum when we select pinned nodes based on the maximum matching theorem. In small-world and scale-free network if we pin the highest degree nodes, the minimum required coupling weight for network synchronization in finite desired time is decreased. More investigation on the self-feedback forcing current [13] may leads to new designs in complex dynamical networks.
References
Turci, L.F.R., Macau, E.E.: Performance of pinning-controlled synchronization. Phys. Rev. E 84(1), 011120 (2011)
Jalili, M.: Enhancing synchronizability of diffusively coupled dynamical networks: a survey. IEEE Trans. Neural Netw. Learn. Syst. 24(7), 1009–1022 (2013)
Slotine, J.-J.E., Li, W.: Applied Nonlinear Control, vol. 60. Prentice-Hall, Englewood Cliffs (1991)
Liu, Y.-Y., Slotine, J.-J., Barabási, A.-L.: Controllability of complex networks. Nature 473(7346), 167–173 (2011)
Yuan, Z., Zhao, C., Di, Z., Wang, W.-X., Lai, Y.-C.: Exact controllability of complex networks. Nat. Commun. 4, 2447 (2013)
Zhao, C., Wang, W.-X., Liu, Y.-Y., Slotine, J.-J.: Intrinsic dynamics induce global symmetry in network controllability. Sci. Rep. 5, 8422 (2015)
Pasqualetti, F., Zampieri, S., Bullo, F.: Controllability metrics, limitations and algorithms for complex networks. In: IEEE American control conference (ACC), 2014, pp. 3287–3292
Yu, W., Chen, G., Lü, J.: On pinning synchronization of complex dynamical networks. Automatica 45(2), 429–435 (2009)
Feng, J., Sun, S., Xu, C., Zhao, Y., Wang, J.: The synchronization of general complex dynamical network via pinning control. Nonlinear Dyn. 67(2), 1623–1633 (2012)
Hu, C., Yu, J., Jiang, H., Teng, Z.: Pinning synchronization of weighted complex networks with variable delays and adaptive coupling weights. Nonlinear Dyn. 67(2), 1373–1385 (2012)
Hu, C., Jiang, H.: Pinning synchronization for directed networks with node balance via adaptive intermittent control. Nonlinear Dyn. 80, 1–13 (2014)
Sun, W., Lü, J., Chen, S., Yu, X.: Pinning impulsive control algorithms for complex network. Chaos Interdiscip. J. Nonlinear Sci. 24(1), 013141 (2014)
Qin, H., Wu, Y., Wang, C., Ma, J.: Emitting waves from defects in network with autapses. Commun. Nonlinear Sci. Numer. Simul. 23(1), 164–174 (2015)
Cloutier, J.R.: State-dependent Riccati equation techniques: an overview. In: Proceedings of the American control conference, 1997, pp. 932–936
Mracek, C.P., Cloutier, J.R.: Control designs for the nonlinear benchmark problem via the state-dependent Riccati equation method. Int. J. Robust Nonlinear Control 8(4–5), 401–433 (1998)
Mobini, F., Ghaffari, A., Alirezaei, M.: Non-linear optimal control of articulated-vehicle planar motion based on braking utilizing the state-dependent Riccati equation method. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. (2015). doi:10.1177/0954407015571156
ERDdS, P., WI, A.: On random graphs I. Publ. Math. Debr. 6, 290–297 (1959)
Watts, D.J., Strogatz, S.H.: Collective dynamics of ‘small-world’ networks. Nature 393(6684), 440–442 (1998)
Barabási, A.-L., Albert, R.: Emergence of scaling in random networks. Science 286(5439), 509–512 (1999)
Cimen, T.: State-dependent Riccati equation (SDRE) control: a survey. In: Proceedings of the 17th world congress of the international federation of automatic control (IFAC), Seoul, Korea, July 2008, pp. 6–11
Elloumi, S., Sansa, I., Braiek, N.B.: On the stability of optimal controlled systems with SDRE approach. In: 9th international multi-conference on systems, signals and devices (SSD), pp. 1–5. IEEE
Lu, J., Ho, D.W., Cao, J.: A unified synchronization criterion for impulsive dynamical networks. Automatica 46(7), 1215–1221 (2010)
Jia, F.L.: Function projective synchronization in complex dynamical networks. In: Advanced Materials Research 2014, pp. 1939–1942. Trans Tech Publ
Tang, Y., Gao, H., Kurths, J., Fang, J-a: Evolutionary pinning control and its application in UAV coordination. IEEE Trans. Ind. Inform. 8(4), 828–838 (2012)
Jalili, M., Sichani, O.A., Yu, X.: Optimal pinning controllability of complex networks: dependence on network structure. Phys. Rev. E 91(1), 012803 (2015)
Acknowledgments
We thank Professor Jean-Jacques Slotine, Professor Gourang Chen and Dr. Mahdi Jalili for valuable discussions.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Complete proof of Theorem 1
Consider the Lyapunov functional candidate:
The derivative of V(t) along the trajectories of (6) is;
Substitution of Eqs. (9) and (21) into (36) in expanded form forK, gives:
where, \(K_i \in R^{n\times n}\) is a matrix whose elements are calculated by Eq. (22) and link to \(e_j (t)\) with linking coupled variable \(\varGamma \). \(K_i\) equal to unpinned nodes is zero matrix.
Based on the Lipchitz condition in Sect. 2 and Kronecker product algebra, Eq. (37) may be rewritten as following form:
We must have;
By substituting Eq. (21) into (30), the following criterion has been established:
Rights and permissions
About this article

Cite this article
Ghaffari, A., Arebi, S. Pinning control for synchronization of nonlinear complex dynamical network with suboptimal SDRE controllers. Nonlinear Dyn 83, 1003–1013 (2016). https://doi.org/10.1007/s11071-015-2383-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-2383-8