
Abstract
This paper develops the stability analysis and delay-dependent \(\mathcal {H}_{\infty }\) control synthesis for linear parameter-varying (LPV) systems with time-varying state delays. On the basis of the Finsler’s lemma, sufficient conditions on \(\mathcal {H}_{\infty }\) performance analysis are formulated in terms of parameterized linear matrix inequalities. The interesting annihilator matrix is constituted by time-varying parameters of LPV systems to reduce the conservatism. A numerical example is presented to confirm the efficiency of the proposed method.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Time delays are omnipresent in practical activities from engineering systems to economic phenomena on the account of measurement, transmission, or unmodeled characteristics of the systems themselves and so on. The ubiquitous time delays of multifarious systems have attracted much attention in the past decades, e.g., see [1–3] and the reference therein. In most engineering systems, the time delays are known and measurable functions of variable operating conditions or system parameters. Meanwhile, the parameter-dependent time delays often occur in chemical processes and biomedical plants. It is well known that if the presence of time delays is not considered in the controller designs, they may possibly cause instability or serious deterioration in the performance of corresponding closed-loop systems.
LPV systems contain time-varying parameters which are unknown in advance but measurable. Consequently, the significant characteristics of such plants depend on these time-varying parameters which comprise the real-time variation information. LPV systems are the important medium from linear systems to nonlinear quadratic systems, because some nonlinear quadratic systems can be modeled as LPV systems by alternating some states as time-varying parameters. Therefore, LPV systems provide a systematic method of designing gain-scheduled controllers for nonlinear systems or other parameter-dependent systems [4]. Based on this point, stability analysis and control synthesis results for LPV systems have been explored in [5–8].
For time-delayed LPV systems, current research achievements are divided into two main directions, namely, delay-independent stability conditions and delay-dependent stability criteria. Delay-independent analysis and synthesis for LPV system subject to time-varying state delays have been studied in [9, 10] through parameter-independent Lyapunov–Krasovskii functions with the rate information of delay variations. Generally speaking, delay-independent conditions are more conservative than delay-dependent ones. Then, in [11, 12], the delay-dependent stability conditions and filter design are proposed with parameter-dependent Lyapunov-Krasovskii functions containing the variation rate of time delays. And [13] addresses the parameter-dependent \(\mathcal {H}_{\infty }\) filter design problem for LPV plants with constant state delays by virtue of similar method.
Currently, a much elaborate Lyapunov–Krasovskii function with additional term is applied to improve the performance of LPV systems. The proposed designs in [14] can effectively illustrate the reduced conservatism of related results. And a universal rate-dependent \(\mathcal {H}_{\infty }\) filter design in [15] is formulated for continuous LPV systems subject to time-varying state delays in the form of linear matrix inequalities (LMIs). On the basis of projection approach and Jensen’s inequality, a parameter-dependent state-feedback control is designed in [16] for LPV systems with time-varying state delays through a nonlinear matrix inequality. The reduced order observer is proposed in [17] for LPV systems with parameter-varying time delays. The authors of [18] obtain their conclusions by means of Finsler’s lemma with the annihilator matrix consisted with constant matrices \(A_{i}\) of LPV systems.
For LPV systems with time-varying state delays, the synthesis objective of this paper is to further reduce the conservatism in the sufficient conditions for stabilization and induced \(\mathcal {L}_{2}\) norm performance through applying the classical Lyapunov–Krasovskii function and Finsler’s lemma, in which the Lyapunov–Krasovskii function or controller design is parameter dependent, and all of the annihilator’s elements are time-varying parameters of LPV systems themselves. Although a single time-varying state delay is considered here, the results can be easily extended to LPV systems subject to multiple time-varying state delays.
The paper is organized as follows. The LPV system with parameter-varying state delays considered in this paper is provided in Sect. 2 with some preliminary results. In Sect. 3, we establish a parameterized linear matrix inequality (PLMI) method of the state-feedback control design for LPV systems with parameter-varying state delays. Section 4 illustrates the validity of our design method in selected numerical example compared to past approaches, and Sect. 5 concludes the whole paper with a summarization.
Notation
Throughout the whole paper, standard notation is adopted. \(\mathbb {R}\) is the set of real numbers and \(\mathbb {R}_{+}\) for the non-negative real numbers. \(\mathbb {R}^{n\times n}\) denotes the set of real \(n\times n\) matrices. \(\mathbb {S}^{n\times n}\) stands for the real, symmetric \(n\times n\) matrices, and \(\mathbb {S}^{n\times n}_{+}\) for the positive definite \(n\times n\) matrices. For a matrix \(P\), \(P> (\ \ge \ )\ 0\) means that \(P\) is a symmetric and (semi) positive definite matrix. For a square matrix \(A\), the symbol \(\mathrm {He}(A)\) denotes \(A^{T}+A\), where \(A^{T}\) is the transpose of \(A\). \(A\otimes B\) means the Kronecker product of the pair of \((A,B)\). The space of continuous functions will be denoted by \(\mathcal {C}\), and the corresponding norm is \(\Vert \phi \Vert =\mathrm {sup}_{t}\Vert \phi (t)\Vert \).
2 Stability analysis of LPV systems with parameter-varying state delays
Consider the following state-space model of a polytopic LPV system with parameter-varying state delays:
where \(x\in \mathbb {R}^{n}\) is state vector, \(z\in \mathbb {R}^{r}\) is performance output, \(w\in \mathbb {R}^{l}\) is an external disturbance. And
where \(A_{i}\in \mathbb {R}^{n\times n}\), \(A_{h_{i}}\in \mathbb {R}^{n\times n}\), \(B_{i}\in \mathbb {R}^{n\times l}\), \(C_{i}\in \mathbb {R}^{r\times n}\), \(C_{h_{i}}\in \mathbb {R}^{r\times n}\), and \(D_{i}\in \mathbb {R}^{r\times l}\) are known real constant matrices, \(i=1,\ 2,\ \ldots ,\ m\). \(\tau (\theta (t))\) is a bounded parameter-varying time delay which is a differentiable scalar function. \(\tau (\theta (t))\) lies in the set
For \(\forall \ t\in \mathbb {R}\), \(t-\tau (\theta (t))\) is monotonically increased. The initial data function \(\phi \) in (1) is a given function in \(\fancyscript{C}([-H, 0])\). \(\theta (t)=[\theta _{1}(t),\ \theta _{2}(t)\), \(\ldots , \theta _{m}(t)]^{T}\) is the time-varying parameter vector satisfying
From the assumption above, it is easy to see that the state-space matrices and the time-delay \(\tau (t)\) are functions of time-varying parameters which can be measured in real-time. In this paper, we hammer at constructing the parameter-varying controller design such that the considered LPV system is asymptotically stable, and the induced \(\mathcal {L}_{2}\) norm is less than a given scalar \(\gamma \).
The following Finsler’s lemma in [19] is essential throughout the whole paper.
Lemma 1
Given matrix functions \(\varGamma (v)\in \mathbb {R}^{r\times n_{\sigma }}\), \(\varPi (v)=\varPi ^{T}(v)\in \mathbb {R}^{n_{\sigma }\times n_{\sigma }}\), and \(\sigma (v)\in \mathbb {R}^{n_{\sigma }}\) with \(v\in \mathbb {V}\subseteq \mathbb {R}^{n_{v}}\), then
if there exists a matrix \(L\) such that
For a proper characterization for the stability problem of the LPV system based on Lemma 1, we label the following representations of the matrix \(\Omega (\theta (t))\), \(A(\theta (t))\) and \(B(\theta (t))\):
where
And the time-varyingly parameter-dependent matrix \(\mathcal {N}(\theta (t))\in \mathbb {R}^{(m-1)\times m}\) is defined as
which satisfies \(\Omega _{1}(\theta (t))\Psi (\theta (t))=0\) with
At first, we consider the unforced LPV systems subject to parameter-varying state delays:
The following sufficient condition is an LMI formulation for asymptotically stabilizing (10).
Theorem 1
Given a unforced time-delayed LPV system (10), if there exist a continuously differentiable matrix function \(P: \mathbb {R}^{s}\rightarrow \mathbb {S}^{n\times n}_{+}\) and matrices \(Q\in \mathbb {S}^{n\times n}_{+}\) and \(L\in \mathbb {R}^{(m+2)n\times (2m-1)n}\) satisfying
where
then the LPV system (10) is asymptotically stable.
Proof
Consider the following Lyapunov–Krasovskii function
Let \(\underline{\lambda }_{P}\), \(\overline{\lambda }_{P}\) be the smallest and largest eigenvalues of \(P(\theta (t))\) for any \(\theta (t)\in \Lambda _{m}\), respectively, and \(\overline{\lambda }_{Q}\) be the largest eigenvalue of \(Q\), then we have that, for \(\forall \ x\in \mathbb {R}^{n}\),
where
Partitioning \(L\) accordingly to \(\Phi _{2}(\theta (t))\), i.e., \(L=[L^{T}_{1}\ \ L^{T}_{2}]^{T}\), then (11) can be read as
Next, let \(\xi =[x^{T}(t)\Psi ^{T}(\theta (t))\quad x^{T}(t-\tau (\theta (t)))]^{T}\), applying Schur’s complement to (15) and pre- and post-multiplying the latter inequality by \(\xi ^{T}\) and \(\xi \), respectively, it is easy to get \(\frac{\mathrm{{d}} V_{1}}{\mathrm{{d}}t}<0\). Hence, the LPV system (10) is asymptotically stable. The proof is completed.
Similar to Theorem 2 in [9], the sufficient condition (11) is an infinite-dimensional convex problem. To transfer it to a finite-dimensional optimization problem, we select proper basis functions \(f_j(\theta (t)), j=1, 2, \dots , n_f,\) such that \(\square \)
Corollary 2
Given a unforced time-delayed LPV system (10) and (16), if there exist symmetric matrices \(P_j, j=1, \dots , n_f,\) matrices \(Q>0\) and \(L\) satisfying
where
and \(\Omega _{2}, N_{1}\) are in (12), then the LPV system (10) is asymptotically stable.
The following result provides a sufficient condition for \(\mathcal {H}_{\infty }\) control problem of time-delayed LPV system (1) in the form of LMIs.
Theorem 3
Consider the LPV system (1) with \(\phi (t)=0\), given a scalar \(\gamma >0\), if there exist a continuously differentiable matrix function \(P: \mathbb {R}^{s}\rightarrow \mathbb {S}^{n\times n}_{+}\) and matrices \(Q\in \mathbb {S}^{n\times n}_{+}\) and \(L\in \mathbb {R}^{(mn+2n+r+l)\times (2m-1)n}\) such that:
where
and \(\Phi _{1}(\theta (t))\), \(N_{1}\) are same in (12), then the LPV system (1) is asymptotically stable, and the induced \(\mathcal {L}_{2}\) norm is less than \(\gamma \).
Proof
Again consider the parameter-dependent Lyapunov–Krasovskii function (13) and notice that
where
Partitioning \(L\) accordingly to \(\Phi _{3}(\theta (t),\gamma )\), i.e., \(L=[L^{T}_{1}\ \ L^{T}_{2}\ \ L^{T}_{3}\ \ L^{T}_{4}]^{T}\), the inequality (19) can be rewritten as
then applying Schur’s complement to (21) and multiplying at the left by
and at the right by its transpose, we obtain \(\mathcal {M}_{1}<0\), where \(N_{2}\Psi (\theta (t))=I_{n}\). Based on the asymptotic stability of (1), it is easy to see that \(V_1(\infty )=0\). Integrating both sides of \(\mathcal {M}_{1}<0\) from \(0\) to \(\infty \), we get
which implies that the induced \(\mathcal {L}_2\) norm of (1) from \(d\) to \(e\) is less than \(\gamma \). The proof is completed. \(\square \)
Remark 1
The sufficient condition in (19) can be parallelly extended to LPV system subject to multiple parameter-varying state delays:
with the delay \(\tau _{i}(\theta (t))\) satisfying \(0\le \tau _{i}(\theta (t))\le h_{i}<\infty , i=1, 2, \ldots , k,\) and \(0<\dot{\tau }_{i}(\theta (t))\le d_{i}<1\), \(i=1, \ldots , k\), and the following Lyapunov function:
3 State-feedback control of LPV systems with parameter-dependent state delays
In this section, we consider the following parameter-dependent time-delayed LPV system:
where \(u(t)\in \mathbb {R}^{s}\) is the control input,\(A(\theta (t))\), \(A_{h}(\theta (t))\), \(C(\theta (t))\), \(C_{h}(\theta (t))\) are the same in (3) and
The three state-feedback controller designs with different Lyapunov functions are as following:
Type 1 Constant state-feedback controller design with a common quadratic Lyapunov function
where \(K\in \mathbb {R}^{s\times n}\) is a constant matrix.
Type 2 Parameter-dependent state-feedback controller design with a common quadratic Lyapunov function
where \(K(\theta (t))\) is a parameter-dependent matrix.
Type 3 Constant state-feedback controller design with a parameter-dependent quadratic Lyapunov function
where \(P(\theta (t))=\sum \limits _{i=1}^{m}\theta _{i}(t)P_{i}\) is a parameter-dependently positive definite matrix, and \(K\in \mathbb {R}^{s\times n}\) is a constant matrix.
We consider such three type controller designs and Lyapunov functions to test the different influences of the time-varying parameters in various parts. Then when such LPV systems are applied in practice, we know how to manage it effectively.
Theorem 4
Consider the system (24) with (27), given a scalar \(\gamma >0\), if there exist real matrices \(Q=Q^{T}>0\), \(Y_{i}\), \(i=1, \ldots , m\), \(R=R^{T}>0\) and \(L\) satisfying
where
\(N_{1}\), \(N_{2}\) and \(\Omega _{3}(\theta (t))\) are same as in (12) and (20), respectively, and
Then the LPV system (24) with (27) is asymptotically stable, and the induced \(\mathcal {L}_{2}\) norm is less than \(\gamma \), where the state-feedback control law \(u=Y(\theta (t))P^{-1}x(t)\).
Proof
Consider the parameter-independent Lyapunov–Krasovskii function \(V_{3}(x_{t},\theta )\) in (27) with \(P=P^{T}>0\) and let
then
where
And when we introduce the auxiliary parameter \(\Psi (\theta (t))\), by Schur’s complement, \(\mathcal {M}_{2}\) can be read as
Then it is facile to get the condition (29) from Lemma 1. The proof is completed.\(\square \)
Remark 2
For \(Q\) and \(R\) are unknown, the condition (29) in Theorem 4 is not an LMI due to the existence of the term QRQ. Hence, the matrix inequality (29) cannot be solved directly through the LMI Control Toolbox. However, similar to [20, 21], Theorem 4 can be further improved as follows.
Theorem 5
Consider the system (24) with (27), given a scalar \(\gamma >0\), if there exist real matrices \(Q=Q^{T}>0\), \(Y_{i}\), \(i=1, \ldots , m\), \(R=R^{T}>0\), \(S=S^{T}>0\), \(W=W^{T}>0\), \(V=V^{T}>0\) and \(L\) satisfying
where
\(N_{1}\), \(N_{2}\), \(\Omega _{3}(\theta (t))\), \(\mathbf {B}_{2}\) and \(\mathbf {D}_{2}\) are same as in (12), (20) and (30), respectively, and
Then the LPV system (24) with (27) is asymptotically stable, and the induced \(\mathcal {L}_{2}\) norm is less than \(\gamma \).
One simplifies \(K(\theta (t))\) to \(K\) and obtains the following sufficient condition for Type 1 control design (26):
Theorem 6
Consider the system (24) with (26), given a scalar \(\gamma >0\), if there exist real matrices \(Q=Q^{T}>0\), \(Y_{i}\), \(i=1, \ldots , m\), \(R=R^{T}>0\), \(S=S^{T}>0\), \(W=W^{T}>0\), \(V=V^{T}>0\) and \(L\) satisfying (34), (35) and the following inequality:
where
\(N_{1}\), \(N_{2}\), \(\Omega _{3}(\theta (t))\), and \(\mathbf {B}_{2}\) are same as in (12), (20), and (30), respectively, and \(Y=KQ\). Then the LPV system (24) with (26) is asymptotically stable, and the induced \(\mathcal {L}_{2}\) norm is less than \(\gamma \).
The following sufficient condition is for system (24) with Type 3 controller design (28):
Theorem 7
Consider the system (24) with (28), given a scalar \(\gamma >0\), if there exist real matrices \(P_{i}=P_{i}^{T}>0\) and \(H_{i}\), \(i=1, \ldots , m\), \(R=R^{T}>0\), \(S=S^{T}>0\), \(W=W^{T}>0\), \(V=V^{T}>0\) and \(L\) satisfying (34), (35) and the following inequality:
where
\(N_{1}\), \(N_{2}\), \(\Omega _{3}(\theta (t))\), \(\mathbf {B}_{2}\), and \(\mathbf {D}_{2}\) are same as in (12), (20), and (30), respectively, then the LPV system (24) with (28) is asymptotically stable, and the induced \(\mathcal {L}_{2}\) norm is less than \(\gamma \).
Proof
Partitioning \(L\) accordingly to \(\Phi _{11}((\theta (t)),\gamma )\), i.e., \(L=[L^{T}_{1} L^{T}_{2}\ L^{T}_{3}\ \ L^{T}_{4}]^{T}\), then (40) can be read as
where
Applying Schur’s complement equivalence to (42) and pre- and post-multiplying the current inequality by \(\xi ^{T}\) and \(\xi \), respectively, where
it is easy to get
with \(V_4(x_t, \theta (t))\) in (28) and \(H(\theta (t))=K P(\theta (t))\),
The last is analogous to the proof of Theorem 4, we omit it. Hence, it follows that the \(\mathcal {L}_{2}\)-gain \(\Vert \mathcal {G}_{wz}\Vert _{\infty }<\gamma \). The proof is completed.\(\square \)
In Theorem 7, we choose \(P(\theta (t))=\sum \nolimits _{i=1}^{m}\theta _{i}(t)P_{i}\) to ensure the linearity of time-varying parameters in sufficient condition for reducing the conservatism.
4 Numerical example
It is easy to see that the sufficient conditions in Theorem 5 are not strict LMIs due to the non-convex inverse constraints in (34), and thus, one always has difficulties to get solutions satisfying the above constraints. Fortunately, this non-convex feasibility problem can be solved by the Cone Complementarity Linearization (CCL) technique as shown in [20, 21]. Motivated by the idea of CCL algorithm, we introduce the following LMIs:
It can be verified that the non-convex feasibility problem formulated in Theorem 5 is equivalent to the following minimization problem:
According to [22], if \(\mathrm {tr}(RS+WV)=2n\), the conditions in Theorem 5 are solvable, and then the desired \(H_{\infty }\) controller can be obtained. The algorithm to solve the above minimization problem is as follows.
Step 1: Find a feasible set
satisfying (33), (35) and (43). Set \(k=0\).
Step 2: Solve the following LMI problem:
Step 3: Substitute the obtained matrix variables \((Q, Y_{1}, \dots , Y_{m}, R, S, W, V, L)\) into (33). If the condition (33) is satisfied with
for some sufficient small scalar \(\delta >0\), then EXIT.
Step 4: If \(k>N\), where \(N\) a specified number of iterations, then, EXIT. Otherwise, set \(k=k+1\) and
and go to Step 2.
Remark 3
In the above algorithm, a minimum optimization problem subject to \(m+6\) matrix variables should be solved. Thus, it requires heavier computational burdens when \(m\) is enough large. And we can obtain the similar algorithm progresses for Theorem 6 and 7.
Consider the following linear time-varying state-delayed system adopted from F. Wu and K.M. Grigoriadis in [9]:
where \(\phi =0.2\), \(\delta =0.1\), \(\mu =0.09\), \(\rho _{1}(t)=\mathrm {sin}(t)\) and \(\rho _{2}(t)=|\mathrm {cos}(5t)|\). It is easy to see that the parameter space is \([-1\ 1]\times [0\ 1]\), and the sliding interval of time-delay \(h(t)=\mu \rho _{2}(t)\) is \([0\ 0.09]\). At the same time, \(|\frac{\mathrm{{d}}\rho _{1}(t)}{\mathrm{{d}}t}|\le 1\) and \(|\frac{\mathrm{{d}}\rho _{2}(t)}{\mathrm{{d}}t}|\le 5\). To applying the theorems above, we select the following time-varying parameters
and from Theorem 5, we get the following parameter matrices
with the derived parameter-dependent state-feedback control design \(u(t)=(K_{1}+\rho _{1}(t)K_{2})x(t)\). And the following matrices are sustained for Theorem 6 with \(u(t)=Kx(t)\):
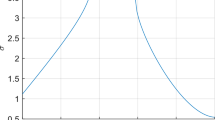
are applicative for Theorem 7 with \(K=[-0.4970 -0.6788]\) and \(P(\theta (t))=P_{1}+\rho _{1}(t)P_{2}+\rho _{2}(t)P_{3}\). Tables 1 and 2 list the comparison analysis of the minimized \(\gamma \)-performance bound among the different Theorems with \(h=1\) and \(h=0.5\), respectively. Figs. 1 and 2 show the trajectories of \(x(t)\) and \(u(t)\), respectively, which obviously display the effectiveness than the contrasted result in [9].

The trajectories of system responses \(x(t)\)

The trajectories of control input \(u(t)\)
5 Conclusion
In this paper, we consider the stability analysis and state-feedback control synthesis problem for LPV systems with parameter-varying state delays and the corresponding sufficient conditions for induced \(\mathcal {L}_{2}\) norm performance are presented in the form of LMIs. On the basis of Finsler’s lemma, we have introduced a parameter-dependent annihilator \(\mathcal {N}(\theta (t))\) for Finsler’ lemma to reduce the conservatism of the previous conclusions in the stability and stabilization analysis for such LPV systems with three class of state-feedback controllers and Lyapunov–Krasovskii functions, respectively. The interesting annihilator matrix in Finsler’s lemma is constituted by time-varying parameters of LPV systems themselves. Simulation example has demonstrated the effectiveness of the proposed methods. In contrast to the delay-dependent LMI methods for LPV systems in [11] and [13], the results in this paper are less conservative and can provide controller for better quadratic performance level for LPV system with rate bounded time-varying state delays.
References
Kolmanovskii, V., Myshkis, A.: Introduction to the Theory and Applications of Functional Differential Equations. Kluwer Academic Publishers, Dordrecht (1999)
Michiels, W., Niculescu, S.I.: Stability and Stabilization of Time-Delay Systems: an Eigenvalue Based Approach. SIAM, Philadelphia (2007)
Gu, K., Kharitonov, V.L., Chen, J.: Stability of Time-Delay Systems. Birkhäuser, Boston (2003)
Amato, F., Calabrese, F., Cosetino, C., Merola, A.: Stability analysis of nonlinear quadratic systems via polyhedral Lyapunov functions. Automatica 47(3), 614–617 (2011)
Becker, G., Packard, A.K.: Robust performance of linear parametrically varying systems using parametrically-dependent linear feedback. Syst. Control Lett. 23(3), 205–215 (1994)
Apkarian, P., Adams, R.: Advanced gain-scheduling techniques for uncertain system. IEEE Trans. Control Syst. Technol. 6(1), 21–32 (1998)
Yoon, M.G., Ugrinovskil, V.A., Pszczel, M.: Gain-scheduling of mini-max optimal state-feedback controllers for uncertain LPV systems. IEEE Trans. Autom. Control 52(2), 311–317 (2007)
Zhang, X., Tsiotras, P., Knospe, C.: Stability analysis of LPV time-delayed systems. Int. J. Control 75(7), 538–558 (2002)
Wu, F., Grigoriadis, K.M.: LPV systems with parameter-varying time delays: analysis and control. Automatica 37(2), 221–229 (2001)
Wei, Y., Duan, Y., Wang, J.: \(\cal {H}_{\infty }\) model reduction for LPV discrete-time state-delay systems. Proc. 2005 Int. Conf. Mach. Learn. Cybern. 3, 1362–1367 (2005)
Zhang, F., Grigoriadis, K.M.: Delay-dependent stability analysis and \(\cal {H}_{\infty }\) control for state-delayed LPV systems. In: Proceedings of the 13th Mediterranean Conference on Control and Automation, pp. 1532–1537 (2005)
Sun, M., Jia, Y., Du, J., Yuan, S.: Delay-dependent \(\cal {H}_{\infty }\) control for LPV systems with time delays. Int. J. Syst. Control. Commun. 1(2), 256–265 (2008)
Velni, J.M., Grigoriadis, K.M.: Delay-dependent \(\cal {H}_{\infty }\) filtering for time-delayed LPV systems. Syst. Control Lett. 57(4), 290–299 (2008)
Velni, J.M., Grigoriadis, K.M.: Delay-dependent \(\cal {H}_{\infty }\) filtering for state-delayed LPV systems. In: Proceedings of IEEE International Symposium on Intelligent Control, pp. 1538–1543 (2005)
Velni, J.M., Grigoriadis, K.M.: Rate-dependent mixed \(\cal {H}_{2 }/\cal {H}_{\infty }\) filtering for time-delayed LPV systems. In: Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, pp. 3168–3173 (2006)
Briat, C., Sename, O., Lafay, J.F.: Parameter dependent state-feedback control of LPV systems with time-varying delays using a projection approach. In: 17th IFAC World Congress, Seoul, pp. 4946–4951 (2008)
Briat, C., Sename, O., Lafay, J.F.: Design of LPV observers for LPV time-delay systems: an algebraic approach. Int. J. Control 84(9), 1533–1542 (2011)
Emerson, R., Silva, P.D., Assuncão, E., Teixeira, M.C.M., Buzachero, L.F.S.: Less conservative control design for linear systems with polytopic uncertainties via state-derivative feedback. Math. Problems. Eng. (2012). doi:10.1155/2012/315049
Boyd, S.P., Ghaoui, L.E., Feron, E., Balakrishnan, V.: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia (1994)
Gao, H., Wang, C.: Comments and further results on A descriptor system approach to \(\cal {H}_{\infty }\) control of linear time-delay systems. IEEE Trans. Autom. Control 48(3), 520–525 (2003)
Lee, Y.S., Moon, Y.S., Kwon, W.H., Park, P.G.: Delay-dependent robust \(\cal {H}_{\infty }\) control for uncertain systems with a state-delay. Automatica 40(1), 65–72 (2004)
El Ghaoui, L., Oustry, F., AitRami, M.: A cone complementarity linearization algorithm for static output-feedback and related problems. IEEE Trans. Autom. Control 42(8), 1171–1176 (1997)
Acknowledgments
This work is supported by Nature Science Foundation under Grant of China (No. 61374087) and the Graduate Innovation and Creativity Foundation of Jiangsu Province under Grant (No. CXZZ12-0202).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, M., Chen, F. Delay-dependent stability analysis and \(\mathcal {H}_{\infty }\) control for LPV systems with parameter-varying state delays. Nonlinear Dyn 78, 1329–1338 (2014). https://doi.org/10.1007/s11071-014-1519-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1519-6