
Abstract
This work explores the steady-state periodic transverse responses with their stabilities of axially accelerating viscoelastic strings. Longitudinally varying tension due to the axial acceleration is recognized in the modeling, while the tension was approximatively assumed to be longitudinally uniform in previous investigations. Exact internal resonances are highlighted in the analysis, while the resonances have been neglected in all available works. A governing equation of transverse nonlinear vibration is derived from the generalized Hamilton principle and the Kelvin viscoelastic model on the assumption that the string deformation is not infinitesimal, but still small. The axial speed is supposed to be a small simple harmonic fluctuation about the constant mean axial speed. The method of multiple scales is applied to solve the governing equation in the parametric resonances when the axial speed fluctuation frequency approaches the first three natural frequencies of the linear generating system based on 1–3 term truncations. The amplitude, the existence conditions, and the stability are determined, and the effects of the viscosity, the mean axial speed, the axial speed fluctuation amplitude, and the axial support rigidity on the amplitude and the existence are examined via the numerical examples. It is found that the 1-term, the 2-term, and the 3-term truncations yield the qualitatively same and the quantitatively close results in the case that there exist the exact internal resonances among the first three frequencies.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Axially moving strings can represent many engineering devices such as paper sheets and textile fibers, while transverse vibrations of the strings may degenerate production quality and generate noise. Knowledge of transverse vibrations of axially moving strings [1] is significant for the design and the operation of the devices. An axially moving string may undergo transverse parametric vibration excited by its axial acceleration. Miranker established the equation governing transverse linear vibration of an axially accelerating string [2]. Mote pioneered the stability analysis of axially accelerating strings [3]. Within the framework of linear vibration, dynamic stability was investigated via the calculation based on the Galerkin discretization [4, 5], the method of multiple scales based on the Galerkin discretization [6, 7], the Floquet theory based on the finite element method [8], and the direct method of multiple scales [6, 9, 10]. If the string deformation is not infinitesimal, the geometric nonlinear terms should be included. Within the framework of nonlinear vibration, transient responses can be computed based on the Galerkin discretization for axially accelerating strings with different constitutive laws [11–13]. Steady-state periodical responses can be predicted via the method of multiple scales based on the Galerkin discretization [14], the direct method of multiple scales [15–17], and an asymptotic analysis approach [18]. In all above-mentioned works [2–18] on transverse vibration of axially accelerating strings, the string tensions were assumed to be spatially uniform (along the longitudinal direction), although there are many works that consider time-dependent variations of tension as parametric excitations [1]. As a consequence, the magnitudes of the tensions are equal and the directions are opposite at both ends of the string. The consequence contradicts the fact that the strings move with a nonzero acceleration, because Newton’s law demands that the acceleration should be caused by a nonzero resultant force. Therefore, the assumption that the tension is independent of the longitudinal coordinate cannot be exactly held. It is only an approximation that reduces the mathematical difficulty to solve the governing equations, because, without the approximation, the coefficients of the governing equations depend not only on the temporal variable, but also on the spatial variable. Recent works on axially accelerating beams demonstrated that the tension longitudinal variation changes both the stability boundaries in linear parametrical vibration [19, 20] and the steady-state response in nonlinear parametrical vibration [21]. However, there has yet been no investigation on the effects of longitudinally varying tensions on the transverse vibration of axially accelerating strings.
Approximate analytical methods are powerful tool to determine stability boundaries of linear vibration and steady-state responses of nonlinear vibration of axially moving strings [1]. Many significant results have been achieved by the application of the approximate analytical methods. In all available works via the approximate analytical methods [6–9, 13–23], it was assumed that two modes with corresponding natural frequencies involved in summation resonance or a mode in principal parametric resonance contribute to dynamic behaviors. The effects of other modes that were truncated have not been considered. If there is no internal resonance, with two or more rationally commensurable frequencies of the linear generating system, the truncations seem physically sound. However, in the case of axially moving strings, all frequencies of the linear generating system are proportional to the first frequency [24], and thus there are infinite exact internal resonances. So far, the widespread practice of neglecting modes uninvolved in parametric resonance has not been validated by examining possible internal resonances. It should be remarked that the infinite exact internal resonances may occur in nonlinear vibration of other physical systems than axially moving strings. For example, all linear frequencies of an Euler- Bernoulli beam pinned at both ends are proportional.
To address the lack of investigations in above mentioned two aspects, this work revisits steady-state responses in the combination and the principal parametric resonances of axially accelerating viscoelastic strings with the emphasis on longitudinally varying tension in modeling and exact internal resonances in analysis. However, infinite mode analysis is infeasible at the present stage. Instead, a heuristic approach, based on finite mode analysis, to internal resonances will be proposed.
The paper is organized as follows. Section 2 derives the governing equations and the associated boundary conditions of coupled planar vibration from the generalized Hamilton principle and the Kelvin viscoelastic model, and reduces the equations to the governing equation of transverse motion in small, but finite stretching problems. Section 3 provides an application framework of the method of multiple scales and determines the possible parametric resonances. Sections 4–6 treat the first three parametric resonances with the account for the exact internal resonances. Section 6 ends the paper with the concluding remarks.
2 Modeling with the recognition of longitudinally varying tensions
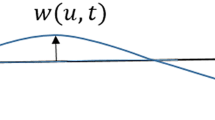
A uniform viscoelastic string of density \(\rho \) and cross-sectional area \(A\) moves axially between two eyelets separated by distance \(L\). Assume that the deformation of the string is confined to a plane. The string is subjected to no external loads. A mixed Eulerian–Lagrangian description is adopted. At axial coordinate \(x\) and time \(t\), the planar vibration of the string is specified, respectively, by the transverse displacement \(v(x, t)\) related to a spatial frame and the longitudinal displacement \(u(x, t)\) related to a translating frame moving with the string. The axial transport speed, denoted by \(\varGamma (t)\), is time dependent. The physical model is shown in Fig. 1.

The physical model of an axially accelerating viscoelastic string
In the present investigation, the effects of the axial string motion on the string deformation are highlighted, while the effects of the string deformation on the axial string motion are neglected. Application of Newton’s second law to small string element \(\hbox {d}x\) leads to the longitudinal change rate of axial tension \(P\)
Integrating equation (1) with respect to \(x\) yields
where \(C(t)\) is the “constant of integration” with respect to \(x\). That is, \(C(t)\) may depend on time \(t\) and is independent of longitudinal coordinate \(x\). At \(x=L\), the right hand side term is equal to the right-end axial tension \(P_{0}+\eta \rho A \varGamma ^{2}\), where \(P_{0}\) is initial axial tension (tension in the string without the axial acceleration and the transverse vibration) and \(\eta \) is the axial support rigidity parameter varying between 0 (infinite rigidity) and 1 (no rigidity) [25]. Thus,
where the third term in Eq. (3) represents the longitudinally varying tension due to the axially accelerating motion.
The generalized Hamilton principle will be employed to formulate the governing equations and the associated boundary conditions. The kinetic energy of the axially moving string is
where a comma preceding \(t\) or \(x\) denotes partial differentiation with respect to \(t\) or \(x\), and \(\varGamma +u,_{t}+\varGamma u,_{x}\) and \(v,_{t}+\varGamma v,_{x}\) are, respectively, the longitudinal and the transverse velocity projections of a point of the axially moving string. Then, the virtual work done by the axial tension during the deformation is
If the string is elastic, the virtual work is the variation of the potential energy. Otherwise, it contains a nonconservative part. The material of the string is assumed to be constituted by the Kelvin model. That is, normal stress \(\sigma _{x}\) and normal strain \(\varepsilon _{x}\) are related by
where \(E\) and \(\alpha \) are, respectively, the Young modulus and the viscosity of the string. The strain obeys the strain-displacement relation
The generalized Hamilton principle takes the form
Substitution of Eqs. (4) and (5) with Eqs. (6) and (7) into Eq. (8) and application of the standard variation procedure in the resulting equation yield
The governing equations of the planar motion for the axially accelerating viscoelastic string are derived from Eqs. (9) and (10) as
Using a Taylor series, one can approximate the denominator of the last term in Eqs. (15) and (16)
where \(O\) (4) stands for terms of power 4 or higher. The transverse motion is generally coupled with the longitudinal motion, but they both are small-amplitude motions in the practical circumstances [26]. In small, but finite stretching problems, one can only retain the lowest order nonlinear term and omit all higher order nonlinear terms. Assume that the longitudinal displacement is much smaller than the transverse displacement, that is \(u=O(v^{2})\). Equation (17) leads to
Substituting equation (18) into Eqs. (15) and (16) and neglecting terms \(O(v^{4})\), one obtains
Substitution of Eq. (3) and into Eq. (19) yields
Integrating equation (21) twice with respect to \(x\), one gets
where \(C_{1}(t)\) and \(C_{2}(t)\) are the “constants of integration” with respect to \(x\). For the boundaries as shown in Fig. 1, it can be assumed that \(u=0\) at \(x=0\) and \(x=L\), which satisfy Eq. (11). \(C_{1}(t)\) and \(C_{2}(t)\) can be determined, and Eq. (22) gives
Substitution of Eqs. (3) and (23) into Eq. (20) yields
Nonlinear integro-partial-differential equation (24) governs transverse motion of the axially accelerating viscoelastic string.
Both the longitudinal variation of the tension and the finite axial support rigidity are accounted for by Eq. (24). If the support is completely rigid, then \(\eta =0\). Equation (24) reduces to
If the tension variation is neglected, then the tension can be assumed as \(P=P_{0}+\eta \rho A\varGamma ^{2}\). Substitution of the tension and Eqs. (23) into (20) gives
In the special case of infinite rigid supports, Eq. (26) reduces to
The following boundary conditions of the axially accelerating viscoelastic string satisfy Eq. (12)
Equations (24) and (28) can be cast into the dimensionless forms by using the following coordinates or parameters
where bookkeeping device \(\varepsilon \) is introduced as a small dimensionless parameter accounting for the fact that the transverse displacement is very small. Substituting Equation (29) into (24) and (28), one gets the dimensionless forms
where \(\kappa =1-\eta \). Equation (30) is essentially identical to Eq. (33) in [21] for axially accelerating beams except for two changes. All bending-related terms in beam case disappear here and a damping term appears because the damping coefficient is no longer assumed to be small.
3 Analysis with the recognition of internal resonances
In the present investigation, the axial speed is supposed to be a small simple harmonic fluctuation about the constant mean axial speed,
where \(\gamma _{0}\) is the constant mean axial speed, and \(\gamma _{1}\) and \(\omega \) are, respectively, the amplitude and the frequency of the axial speed fluctuation, all in the dimensionless forms. Substitution of Eqs. (32) into (30) leads to
The method of multiple scales will be employed to analyze parametric vibration. The solutions to Eq. (33) can be assumed as
where \(T_{0}=t\) and \(T_{1}=\varepsilon t\) are, respectively, the fast and the slow time scales. Substitution of Eq. (34) and the following relationship
into Eqs. (33) and (31) and then equalization of coefficients of \(\varepsilon ^{0}\) and \(\varepsilon ^{1}\) in the resulting equations lead to, at the order \(\varepsilon ^{0}\),
and, at the order \(\varepsilon ^{1}\),
Since the damping term due to the viscoelasticity appears only in Eq. (38), the linear generating system (36) is a gyroscopic continuous system with pure imaginary eigenvalues. The solution is [24]
where
\(A_{n}\) denotes a complex function to be determined later, \(\varphi _{n}\) and \(\omega _{n}\) are, respectively, the \(n\hbox {th}\) mode function and natural frequency, and cc stands for the complex conjugate of the proceeding terms. It should be noted that, under boundary conditions (37), there exists the strict proportional relationship \(\omega _{n}=n\omega _{1}\) or \(m\omega _{n}=n\omega _{m}\) among any nature frequencies. The fact has been neglected in all previous investigations on transverse vibration of axially moving strings with the same conditions.
Here the internal resonances will be treated in a heuristic way. Parametric resonances in the cases of \(\omega \) near \(\omega _{1}\), \(2\omega _{1}\), and \(3\omega _{1}\) are investigated with the presence of the exact internal resonances. In each case, solution (40) is, respectively, retained 1–3 terms. If the different term truncations lead to qualitatively and quantitatively similar results, the results are convincingly applicable even if the effects of infinite high-order internal resonances are neglected. Otherwise, if the different term truncations yield totally diverse results, more sophisticated approaches should be developed to derive the applicable solutions.
The sum of first \(k\) terms of the infinite expansion in equation (40) will be referred as the \(k\)-term truncated solution or simply the \(k\)-term truncation. Then, the 3-term truncated solution to Eq. (36) is expressed by
Substitution of Eqs. (42) into (38) yields
where
and NSNT stands for nonsecular nonlinear terms. They cannot give rise to secular terms for the first three truncations, such as \(\exp (3\hbox {i}\omega _{2}T_{0})\), \(\exp (3\hbox {i}\omega _{3}T_{0})\), \(\exp [\hbox {i}(\omega _{1}+2\omega _{2})T_{0}]\), \(\exp [\hbox {i}(\omega _{1}+2\omega _{3})T_{0}]\), \(\exp [\hbox {i}(\omega _{2}+2\omega _{3})T_{0}]\), \(\exp [\hbox {i}(2\omega _{1}+\omega \quad _{2})T_{0}]\), \(\exp [\hbox {i}(2\omega _{1}+\omega _{3})T_{0}]\), \(\exp [\hbox {i}(2\omega _{2}+\omega _{3})T_{0}]\), \(\exp [\hbox {i}(-\omega _{1}+2\omega _{3})T_{0}]\), \(\exp [\hbox {i}(-\omega _{2}+2\omega _{3})T_{0}]\), \(\exp [\hbox {i}(-2\omega _{1}+\omega _{2})T_{0}]\), \(\exp [\hbox {i}(\omega _{1}+\omega _{2}+\omega _{3})T_{0}]\), \(\exp [\hbox {i}(-\omega _{1}+\omega _{2}+\omega _{3})T_{0}]\), and \(\exp [\hbox {i}(\omega _{1}+\omega _{2}-\omega _{3})T_{0}]\).
According to Eq. (43), if the axial speed variation frequency \(\omega \) approaches integer times of the first natural frequency of the linear generating system (36), parametric resonance may occur.
4 Parametric resonance in the case of \(\omega \) near \(\omega _{1}\)
This case is the secondary parametric resonance in the first mode. The secondary parametric resonance in a mode means the excitation frequency is close to the natural frequency corresponding to the mode. A detuning parameter \(\sigma \) is introduced to quantify the deviation of \(\omega \) from \(\omega _{1}\), and \(\omega \) is described by
The solvability conditions of Eq. (43) demand the orthogonal relationships [27]
Application of the distributive law of the inner product for complex functions to Eqs. (46a–c) leads to
where
The detailed expressions of these coefficients can be found in Appendixes 1 and 2. The expressions show that for \(h=1,2,3, \kappa _{h1},\mu _{h1},\tau _{h1},\xi _{h1},\upsilon _{h1}\) and – \(\varsigma _{h1}\) are pure imaginary numbers with negative imaginary parts, \(\kappa _{h2}, \mu _{h2},\tau _{h2},\xi _{h2}, \upsilon _{h2}\) and -\(\varsigma _{h2}\) are positive real numbers, while \(\delta _{h}\) and \(\chi _{h}\) are complex numbers.
4.1 The 1-term truncation
The 1-term truncated solution to Eq. (36) is expressed by
The solvability condition reduces to
Express the solution to Eq. (50) in the polar form
where \(\alpha _{1}\) and \(\beta _{1}\), both real functions of \(T_{1}\), are, respectively, the amplitudes and the phase angles of the responses in the 1-term truncation. Substitution of equation (51) into Eq. (50) and separation of real and imaginary parts in the resulting equation give
where the superscript I denotes the imaginary part of the corresponding parameter. Equations (52a) and (52b) possess a fixed point at the origin (trivial zero solution). Thus, the only steady-state response is the straight equilibrium configuration.
4.2 The 2-term truncation
The 2-term truncated solution to Eq. (36) is expressed by
The solvability conditions are simplified to
Express the solution to Eqs. (54a) and (54b) in the polar form
where \(\alpha _{2}\) and \(\beta _{2}\), both real functions of \(T_{1}\), are, respectively, the amplitudes and the phase angles of the responses in the second mode. Substitution of Eq. (55) into Eqs. (54a) and (54b) and separation of real and imaginary parts in the resulting equation yield
where the superscripts R and I denote real part and imaginary part of the corresponding parameter, respectively, and \(\theta _{1}= \sigma T_{1}+\beta _{1}-\beta _{2}\). Equations (56a)–(56d) possess a fixed point at the origin. From Eqs. (56b) and (56d), one can obtain
If there is a nonzero solution, the amplitudes \(\alpha _{1 }\) and \(\alpha _{2}\) and the new phase angle \(\theta _{1}\) should be constant for the steady-state response,
When \(\alpha =0\), for nonzero \(\alpha _{1 }\) and \(\alpha _{2}\), Eqs. (58a) and (58b) yield
It is noticed that \(\delta _{2}\) and \(\chi _{1}\) are dependent of \(\gamma _{0}\) and \(\eta \), but independent of \(\alpha \). Therefore, Eq. (59) still hold for \(\alpha \ne 0\). Thus, there is a constant \(H_{1}\) (possibly dependent of \(\gamma _{0}\) and \(\eta \)) such that
Actually, Eqs. (134)–(137) yield \(H_{1}=-1/2\). Substitution of Eq. (60) into (58) leads to
where Eqs. (107), (109), (117), and (119) are used. Under the square root, the denominator is positive as a square, and the numerator is negative because
Therefore, the right hand of equation (61) is not a real number. Thus, the nontrivial solution does not exist.
4.3 The 3-term truncation
Express the solution to Eqs. (47a)–(47c) in the polar form
where \(\alpha _{3}\) and \(\beta _{3}\), both real functions of \(T_{1}\), are, respectively, the amplitudes and the phase angles of the responses in the third mode. Substitution of Eqs. (62) into (47) and separation of real and imaginary parts in the resulting equation give
where \(\theta _{1}=\sigma T_{1}+\beta _{1}-\beta _{2}, \theta _{2}=\sigma T_{1}+\beta _{2}-\beta _{3}, \theta _{3}=\beta _{1}-2\beta _{2}+\beta _{3}=\theta _{1}-\theta _{2}\), and \(\theta _{4}=3\beta _{1}-\beta _{3}\). Equations (63a–f) possess a fixed point at the origin. From Eqs. (63b), (63d), and (63f), one can obtain
If there is a nonzero solution, the amplitudes \(\alpha _{1 }\) and \(\alpha _{2}\) and the new phase angles \(\theta _{1},\theta _{2}\), and \(\theta _{4}\) should be constant for the steady-state response. Numerical calculations for different sets of parameters do not locate the nonzero solution. Thus, numerical results strongly indicate the nonexistence of nontrivial steady-state response.
In the secondary parametric resonance of the first mode, 1-term, 2-term, and 3-term truncations all reveal the existence of the zero steady-state response and the nonexistence of nontrivial steady-state response.
5 Parametric resonance in the case of \(\omega \) near \(2\omega _{1}\)
This case can be regarded as the principal parametric resonance in the first mode and the secondary parametric resonance in the second mode, since there is internal resonance \(\omega _{2}=2\omega _{1}\). The principal parametric resonance in a mode means the excitation frequency is close to the 2 times of the natural frequency corresponding to the mode. A detuning parameter \(\sigma \) is introduced to quantify the deviation of \(\omega \) from \(2\omega _{1}\), and \(\omega \) is described by
The solvability conditions demand the orthogonal relationships [27]
Application of the distributive law of the inner product for complex functions to Eqs. (66a–c) leads to
where
The detailed expressions of these coefficients can be found in Appendixes 1 and 3. The expressions show that, for \(h=1,2,3, \kappa _{h1}, \mu _{h1}, \tau _{h1}, \xi _{h1}, \upsilon _{h1}\) and \(-\varsigma _{h1}\) are pure imaginary numbers with negative imaginary parts, \(\kappa _{h2}, \mu _{h2}, \tau _{h2}, \xi _{h2}, \upsilon _{h2}\) and \(-\varsigma _{h2}\) are positive real numbers, while \(\delta _{h}\) and \(\chi _{h}\) are complex numbers.
5.1 The 1-term truncation
The solvability condition reduces to
Express the solution to Eq. (69) in the polar form (51). Substitution of Eq. (51) into Eq. (69) and separation of real and imaginary parts in the resulting equation yield
where \(\theta _{2}=\sigma T_{1}-2 \beta _{1}\). Equations (70a) and (70b) possess a fixed point at the origin. From equation (70b), one obtains
If there is a nonzero steady-state response, the amplitude \(\alpha _{1}\) and the new phase angle \(\theta _{2}\) should be constant,
Eliminating \(\theta _{2}\) from Eqs. (72a) and (72b), one obtains the amplitude of the steady-state response
Inserting equations (106), (107), (144), and (145) into Eq. (73) can express explicitly the amplitude (\(\alpha _{1})_{1,2}\) in \(k_{1}, \kappa , \alpha , \gamma _{0},\gamma _{1}, a_{1},\omega _{1}\), and \(\sigma \) . Equation (73) leads to the existence conditions of the steady-state responses as
and
where Eqs. (106), (107), (144), and (145) are used. The Jacobian matrix of the right hand functions of Eqs. (70a) and (71) calculated at the steady-state response is
The characteristic equation of the Jacobian matrix is
According to the Routh–Hurwitz criterion, the first nontrivial solution (positive sign chosen in Eq. (73)) is always stable, and the second nontrivial solution (negative sign chosen in Eq. (73)) is always unstable.
To demonstrate the analytical results, consider a string with \(\rho =7680\hbox {kg/m}^{3},E=0.3 \times 10^{11}\hbox {Pa}, \alpha =3.0358\times 10^{7}\hbox {Pa}\cdot \hbox {s}, A=0.04\times 0.02\hbox {m}^{2}, L=1\hbox {m}\), and \(P_{0}=60\hbox {kN}\). The string axially moves in constant mean speed \(\gamma _{0}=19.7642\hbox {m/s}\) plus simple harmonic variation with the amplitude \(\gamma _{1}=0.9882\hbox {m/s}\). The corresponding dimensionless values are \(\alpha =0.1, \gamma _{0}=0.2, \gamma _{1}=0.01\), and \(k_{1}=20\). Choose \(\eta =0.5\). The set of the parameters will be used in the calculation unless other values are assigned. The first three natural frequencies of the linear generating system are \(\omega _{1}=3.048427442, \omega _{2}=6.096854884\), and \(\omega _{3}=9.145282326\).
Figure 2 depicts the relationship between the amplitude and the detuning parameter for the steady-state responses based on the 1-term truncation. The solid line denotes stable response and the dot line denotes unstable response. If the detuning parameter becomes larger and approaches to zero enough from the negative, the zero solution loses its stability and bifurcates into a nonzero stable response. If the detuning parameter becomes larger and leaves the zero far enough to the positive, the zero solution becomes stable again and bifurcates an unstable nonzero response. The interval between two bifurcations will be referred as the instability range. The amplitudes of both the stable and unstable responses increase with the increasing detuning parameter.

The steady-state responses in parametric resonance (\(\omega \approx 2\omega _{1})\) based on the 1-term truncation
The effects of relevant parameters on the steady-state response can be numerically revealed. The effects of the viscosity coefficients are shown in Fig. 3a. The smaller viscosity coefficient leads to the larger stable amplitude and the larger instability range. The effects of the mean axial speeds are demonstrated in Fig. 3b. The smaller mean axial speed leads to the larger amplitude and the larger instability range. The effects of the axial speed fluctuation amplitudes are exhibited in Fig. 3c. The larger axial speed fluctuation amplitude leads to the larger amplitude in the responses but the larger instability range. The effects of the support rigidity parameters are displayed in Fig. 3d. The smaller support rigidity parameter leads to the slightly smaller amplitude in the responses and the slightly larger instability range.

The effects of parameters on the responses (\(\omega \approx 2\omega _{1})\) based on the 1-term truncation: a the viscosity coefficients (solid \(\alpha =0.1\); dashed \(\alpha =0.2\)), b the mean axial speeds (solid \(\gamma _{0}=0.2\); dashed \(\gamma _{0}=0.1\)), c the axial speed fluctuation amplitudes (solid \(\gamma _{1}=0.01\); dashed \(\gamma _{1}=0.005\)), d the axial support rigidity parameter (dot \(\eta =0.0\); solid \(\eta =0.5\))
5.2 The 2-term truncation
The solvability conditions are simplified to
Express the solution to Eqs. (77a) and (77b) in the polar form (55). Substitution of Eq. (55) into Eqs. (77a), (77b) and separation of real and imaginary parts in the resulting equation give
where \(\theta _{2}=\sigma T_{1}-2\beta _{1}\). Equations (78a)–(78d) possess a fixed point at the origin. If there is a nonzero steady-state response in the second mode, the amplitude \(\alpha _{2}\) and the phase angle \(\beta _{2}\) should be constant. Equations (78c,d) yield
However, Eqs. (116)–(119) imply
So Eqs. (79a, b) lead to a contradiction if \(\alpha _{2\ne }0\). Therefore, the amplitudes \(\alpha _{2}\) must be equal to zero. The second mode has actually no effect on the first mode in the 2-term truncation. Thus, the 2-term truncation yields the same result as that of the 1-term truncation.
5.3 The 3-term truncation
Express the solution to Eqs. (67a–c) in the polar form (62). Substitution of Eq. (62) into them and separation of real and imaginary parts in the resulting equation give
where \(\theta _{1}=\sigma T_{1}+ \beta _{1}-\beta _{3}, \theta _{2}=\sigma T_{1}-2\beta _{1}, \theta _{3}=\beta _{1}-2\beta _{2}+\beta _{3}\), and \(\theta _{4}=3\beta _{1}-\beta _{3}=\theta _{1}- \theta _{2}\). Equations (81a–f) possess a fixed point at the origin. From Eqs. (81b), (81d), and (81f), one gets
If one assumes that there is a nonzero steady-state response, then the amplitudes \(\alpha _{1},\alpha _{2}\), and \(\alpha _{3}\) and the new phase angles \(\theta _{1}, \theta _{2}\), and \(\theta _{3}\) should be constant. Numerical calculations for different sets of parameters strongly indicate that \(\alpha _{2}\) is equal to zero. To reduce the amount of computation, \(\alpha _{2}\) will be omitted in the following investigation. Even if \(\alpha _{2}=0\) is only ad hoc for numerical simplification, at least the calculation results will not be affected. Then, the solvability conditions reduce
Separation of real and imaginary parts in the resulting equation gives
The amplitudes of the steady-state oscillating response in the 3-term truncation can be solved from Eqs. (84a)–(84d). The stability of the nontrivial solutions can be determined by eigenvalues of the Jacobian matrix of Eqs. (84a)–(84d) calculated at the nontrivial solutions.
Figure 4 depicts the relationship between the amplitude and the detuning parameter for the responses based on the 3-term truncation for the parameters used in 5.2, namely \(\alpha =0.1,\gamma _{0}=0.2, \gamma _{1}=0.01, k_{1}=20\), and \(\eta =0.5\). In Fig. 4, the solid line denotes stable solutions and the dot line denotes unstable solutions. The behaviors of the first mode are similar to the outcomes based on the 1-term truncation shown in Fig. 2. However, the 3-term truncation gives additionally the response of the third mode, but the response of the third mode is much smaller than that of the first mode. The effects of the viscosity, the mean axial speed, the axial speed fluctuation amplitude, and the axial support rigidity are illustrated in Fig. 5. The changing trends of the responses in the first mode are the same as those obtained via the 1-term truncation.

The steady-state responses in parametric resonance (\(\omega \approx 2 \omega _{1})\) based on the 3-term truncation: a the first mode and b the third mode

The effects of parameters on the responses (\(\omega \approx 2 \omega _{1})\) based on the 3-term truncation: a the viscosity coefficients (solid \(\alpha =0.1\), dashed \(\alpha =0.2\)): the first mode, b the viscosity coefficients (solid \(\alpha =0.1\), dashed \(\alpha =0.2\)): the third mode, c the mean axial speeds (solid \(\gamma _{0}=0.2\); dashed \(\gamma _{0}=0.1\)): the first mode, d the mean axial speeds (solid \(\gamma _{0}=0.2\); dashed \(\gamma _{0}=0.1\)): the third mode, e the axial speed fluctuation amplitudes (solid \(\gamma _{1}=0.01\); dashed \(\gamma _{1}=0.005\)): the first mode, f the axial speed fluctuation amplitudes (solid \(\gamma _{1}=0.01\); dashed \(\gamma _{1}=0.005\)): the third mode, g the axial support rigidity parameter (dot \(\eta =0.0\); solid: \(\eta =0.5\)): the first mode, h the axial support rigidity parameter (dot \(\eta =0.0\); solid \(\eta =0.5\)): the third mode
5.4 Comparisons of the results in the 1-term and the 3-term truncations
The previous two subsections demonstrate that the amplitudes of steady-state periodic responses in the first mode predicted based on the 1-term truncation change in the qualitatively same way as those on the 3-term truncation do, in despite the existence of the steady-state response in the third mode yielded via 3-term truncation. In the following, the results based on the 1-term truncation and the 3-term truncation will be quantitatively contrasted.
To examine the quantitative differences with the account of the steady-state in the third mode, the vibration of the string center is calculated based on the 1-term truncation and the 3-term truncation, respectively. In the 1-term truncation, the amplitudes of the string center steady-state responses are \(V_{0}=2 \alpha _{1}{\vert }\varphi _{1}(0.5){\vert }\), where \(\alpha _{1}\) is defined by Eq. (73) and modal function \(\varphi _{1}(x)\) is defined by Eq. (41). In the 3-term truncation, substitution of Eqs. (62) into (42) yields
As cos(\(\omega t)=(\text {e}^{\omega t}+\text {e}^{-\omega t})/2\) and \(\sin (\omega t)=(\text {e}^{\omega t}-\text {e}^{-\omega t})/2\hbox {i}\), Eq. (85) can be expressed by
where
Then, the amplitude of the stable steady-state response \(V_{0}\) of the 3-term truncation is the maximum of \(v_{0}\) in equation (86). Figure 6 depicts the steady-state responses of the string center changing with the detuning parameter based on the 1-term truncation (dots) and the 3-term truncation (solid lines), respectively. The comparisons demonstrate that they have a good agreement for the different 5 sets of the parameters.

The comparison of the 1-term and the 3-term truncations for different parameters: a \(\alpha =0.1, \gamma _{0}=0.2, \gamma _{1}=0.01\), and \(\eta =0.5\), b \(\alpha =0.2, \gamma _{0}=0.2, \gamma _{1}=0.01\), and \(\eta =0.5\), c \(\alpha =0.1, \gamma _{0}=0.1, \gamma _{1}=0.01\), and \(\eta =0.5\), d \(\alpha =0.1, \gamma _{0}=0.2,\gamma _{1}=0.005\), and \(\eta =0.5\), e \(\alpha =0.1, \gamma _{0}=0.2, \gamma _{1}=0.01\), and \(\eta =0.0\)
6 Parametric resonance in the case of \(\omega \) near \(3\omega _{1}\)
A detuning parameter \(\sigma \) is introduced to quantify the deviation of \(\omega \) from \(3\omega _{1}\), and \(\omega \) is described by
The solvability conditions demand the orthogonal relationships [27]
Application of the distributive law of the inner product for complex functions to Eqs. (89a–c) leads to
where
The detailed expressions of these coefficients can be found in Appendixes 1 and 4.
6.1 The 1-term truncation
The solvability condition is simplified to
It can be found that Eqs. (92) and (50) are the identical. There is only a trivial solution in the 1-term truncation. The 1-term truncation locates the parametric resonance in the case of \(\omega \) near \(\omega _{3}\), which is actually same as the case of \(\omega \) near \(\omega _{1}\). On the other hand, the parametric resonance in the case of \(\omega \) near \(3\omega _{1}=\omega _{1}+\omega _{2}\) can be regarded as the summation parametric resonance of the first two modes. Thus, as least the 2-term truncation should be used.
6.2 The 2-term truncation
The solvability conditions are simplified to
Express the solution to Eqs. (93a) and (93b) in the polar form, substitution of Eq. (55) into them and separation of real and imaginary parts in the resulting equation give
where \(\theta _{1}=\sigma T_{1}- \beta _{1}-\beta _{2}\). From Eqs. (94b) and (94d), one obtains
Equations (94a)–(94d) possess a zero solution. If it is assumed that there is a nonzero solution, the amplitudes \(\alpha _{1}\) and \(\alpha _{2}\) and the phase angle \(\theta _{1}\) should be constant for the steady-state solution. Thus, Eqs. (94a), (94c), and (95) yield
Substitution of Eqs. (97) into (96a) and (96b) yields
where Eqs. (107), (109), (117), and (119) are inserted. Substitution of Eqs. (98) into (96a) and (96c) yields
where \(H\) denotes the constant in the right hand of equation (98) and
The existence conditions of periodic responses are derived from Eq. (99) as
The Jacobian matrix of the right hand functions of Eqs. (94a) and (95) calculated at the nontrivial solutions is
The characteristic equation of the Jacobian matrix is
The Routh–Hurwitz criterion guarantees that the first nontrivial solution is always unstable and the second nontrivial solution is always stable.
Figure 7 depicts the relationship between the amplitude and the detuning parameter for the responses based on the 2-term truncation for the parameters used in 5.2, namely \(\alpha =0.1, \gamma _{0}=0.2, \gamma _{1}=0.01,k_{1}=20\), and \(\eta =0.5\). In Fig. 7, the solid lines denote the stable response and the dot lines denote the unstable response. The responses in the first two modes \(\alpha _{1 }\) and \(\alpha _{2}\) have stable branches and unstable branches from the points at \(\sigma =-0.0464\) and \(\sigma =0.0464\), respectively. The amplitudes of both the stable and unstable nonzero responses increase with the increasing detuning parameters. The amplitude of the response in the first mode is larger than that in the second mode.

The steady-state responses in parametric resonance (\(\omega \approx 3\omega _{1})\): a the first mode and b the second mode
The effects of the viscosity, the mean axial speed, the axial speed fluctuation amplitude, and the axial support rigidity are illustrated in Fig. 8. In the summation parametric resonance, the response amplitude and the instability range increase with the axial speed fluctuation amplitude, but they are not sensitive to the mean axial speed, the axial speed fluctuation amplitude, and the axial support rigidity.

The effects of parameters on the steady-state responses in parametric resonance (\(\omega \approx 3\omega _{1})\): a the viscosity coefficients (solid \(\alpha =0.1\), dashed \(\alpha =0.2\)): the first mode, b the viscosity coefficients (solid \(\alpha =0.1\), dashed \(\alpha =0.2\)): the second mode, c the mean axial speeds (solid \(\gamma _{0}=0.2\); dashed \(\gamma _{0}=0.1\)): the first mode, d the mean axial speeds (solid \(\gamma _{0}=0.2\); dashed \(\gamma _{0}=0.1\)): the second mode, e the axial speed fluctuation amplitudes (solid \(\gamma _{1}=0.01\); dashed \(\gamma _{1}=0.005\)): the first mode, f the axial speed fluctuation amplitudes (solid \(\gamma _{1}=0.01\); dashed \(\gamma _{1}=0.005\)): the second mode, g the axial support rigidity parameter (dot \(\eta =0.0\); solid \(\eta =0.5\)): the first mode, h the axial support rigidity parameter (dot \(\eta =0.0\); solid \(\eta =0.5\)): the second mode
6.3 The 3-term truncation
Express the solution to Eqs. (90a–c) in the polar form. Substitution of Eq. (62) into them and separation of real and imaginary parts in the resulting equation give
where \(\theta _{1}=\sigma T_{1}-\beta _{1}-\beta _{2}, \theta _{2}=\beta _{1}-2\beta _{2}+\beta _{3}\), and \(\theta _{3}=3\beta _{1}-\beta _{3}\). Equations (104a–f) possess a zero solution. It can be derived from Eqs. (104b), (104d), and (104f)
If we assume that there is a nonzero steady-state response, the amplitudes \(\alpha _{1}, \alpha _{2}\), and \(\alpha _{3}\) and the new phase angles \(\theta _{1},\theta _{2}\), and \(\theta _{3}\) should be constant for the response. Numerical tests strongly indicate that \(\alpha _{3}\) is equal to zero. Therefore, the third mode has actually no effect on the first two modes in the 3-term truncation. The 3-term truncation yields the same results as the 2-term truncation.
7 Conclusions
The present work treats nonlinear parametric vibration of axially accelerating viscoelastic strings. The longitudinally varying tensions are recognized in the modeling, and the exact internal resonances are accounted in the analysis. An integro-partial-differential governing equation with time/space-dependent coefficients is derived to governing the transverse vibration of the string. The method of multiple scales is applied to the integro-partial-differential governing to seek the approximate analytical solution. Based on 1–3 term truncation, the parametric resonances in the cases of \(\omega \) near \(\omega _{1}, 2\omega _{1}\), and \(3\omega _{1}\) are investigated with the presence of the exact internal resonances. In all truncations, there are steady-state nonzero periodic responses in the \(\omega \approx 2\omega _{1}\) and \(\omega \approx 3\omega _{1}\) parametric resonances, while there is only zero response in the \(\omega \approx \omega _{1}\) parametric resonance. The amplitude, the existence conditions, and the stability are determined, and the effects of the viscosity, the mean axial speed, the axial speed fluctuation amplitude, and the axial support rigidity on the amplitude and the existence are examined. It is found that the 2-term and the 3-term truncation yield the qualitatively same and the quantitatively close results in the \(\omega \approx 2\omega _{1}\) parametric resonance and the exact same results in the \(\omega \approx 3 \omega _{1}\) parametric resonance. It is suggested that the effects of infinite exact internal resonances may be neglectable.
References
Chen, L.Q.: Analysis and control of transverse vibrations of axially moving strings. Appl. Mech. Rev. 58, 91–116 (2005)
Miranker, W.L.: The wave equation in a medium in motion. IBM J. Res. Dev. 4, 36–42 (1960)
Mote Jr, C.D.: Stability of systems transporting accelerating axially moving materials. J. Dyn. Syst. Meas. Control Trans. ASME 97, 96–98 (1975)
Pakdemirli, M., Batan, H.: Dynamic stability of a constantly accelerating strip. J. Sound Vib. 168, 371–378 (1993)
Pakdemirli, M., Ulsoy, A.G., Ceranoglu, A.: Transverse vibration of an axially accelerating string. J. Sound Vib. 169, 179–196 (1994)
Pakdemirli, M., Ulsoy, A.G.: Stability analysis of an axially accelerating string. J. Sound Vib. 203, 815–832 (1997)
Suweken, G., Van Horssen, W.T.: On the transversal vibrations of a conveyor belt with a low and time- varying velocity, part I: the string-like case. J. Sound Vib. 264, 117–133 (2003)
Zen, G., Müftü, S.: Stability of an axially accelerating string subjected to frictional guiding forces. J. Sound Vib. 289, 551–576 (2006)
Ponomareva, S.V., Van Horssen, W.T.: On transversal vibrations of an axially moving string with a time-varying velocity. Nonlinear Dyn. 50, 315–323 (2007)
Ghayesh, M.H.: Stability characteristics of an axially accelerating string supported by an elastic foundation. Mech. Mach. Theory 44, 1964–1979 (2009)
Fung, R.F., Huang, J.S., Chen, Y.C.: The transient amplitude of the viscoelastic travelling string: an integral constitutive law. J. Sound Vib. 201, 153–167 (1997)
Fung, R.F., Huang, J.S., Chen, Y.C., Yao, C.M.: Nonlinear dynamic analysis of the viscoelastic string with a harmonically varying transport speed. Comput. Struct. 66, 777–784 (1998)
Chen, L.Q., Zhao, W.J., Zu, J.W.: Transient responses of an axially accelerating viscoelastic string constituted by a fractional differentiation law. J. Sound Vib. 278, 861–871 (2004)
Huang, J.S., Fung, R.F., Lin, C.H.: Dynamic stability of a moving string undergoing three-dimensional vibration. Int. J. Mech. Sci. 37, 145–160 (1995)
Chen, L.Q.: Principal parametric resonance of axially accelerating viscoelastic strings constituted by the Boltzmann superposition principle. Proc. R. Soc. Lond. 461, 2701–2720 (2005)
Ghayesh, M.H.: Nonlinear transversal vibration and stability of an axially moving viscoelastic string supported by a partial viscoelastic guide. J. Sound Vib. 314, 757–774 (2008)
Ghayesh, M.H.: Parametric vibrations and stability of an axially accelerating string guided by a non-linear elastic foundation. Int. J. Non-Linear Mech. 45, 382–394 (2010)
Chen, L.Q., Chen, H., Lim, C.W.: Asymptotic analysis of axially accelerating viscoelastic strings Int. J. Eng. Sci. 46, 976–985 (2008)
Chen, L.Q., Tang, Y.Q.: Parametric stability of axially accelerating viscoelastic beams with the recognition of longitudinally varying tensions. J. Vib. Acoust. 134, 011008 (2012)
Tang, Y.Q., Chen, L.Q., Zhang, H.J., Yang, S.P.: Stability of axially accelerating viscoelastic Timoshenko beams: recognition of longitudinally varying tensions. Mech. Mach. Theory 62, 31–50 (2013)
Chen, L.Q., Tang, Y.Q.: Combination and principal parametric resonances of axially accelerating viscoelastic beams: recognition of longitudinally varying tensions. J. Sound Vib. 330, 5598–5614 (2011)
Zhang, L., Zu, J.W.: Nonlinear vibration of parametrically excited moving belts. J. Appl. Mech. Trans. ASME 66, 396–409 (1999)
Mockensturm, E.M., Guo, J.: Nonlinear vibration of parametrically excited, viscoelastic, axially moving strings. J. Appl. Mech. Trans. ASME 72, 374–380 (2005)
Wickert, J.A., Mote Jr, C.D.: Classical vibration analysis of axially moving continua. J. Appl. Mech. Trans. ASME 57, 738–744 (1990)
Mote Jr, C.D.: A study of band saw vibrations. J. Franklin Inst. 276, 430–444 (1965)
Wickert, J.A.: Non-linear vibration of a traveling tensioned beam. Int. J. Non-Linear Mech. 27, 503–517 (1992)
Chen, L.Q., Zu, J.W.: Solvability condition in multi-scale analysis of gyroscopic continua. J. Sound Vib. 309, 338–342 (2008)
Acknowledgments
This work was supported by the National Outstanding Young Scientists Foundation of China (No. 10725209), the State Key Program of National Natural Science of China (Nos. 10932006 and 11232009), the National Natural Science Foundation of China (No. 11202135) and Shanghai Leading Academic Discipline Project (No. S30106).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
Appendix B
Appendix C
Appendix D
Rights and permissions
About this article
Cite this article
Chen, LQ., Tang, YQ. & Zu, J.W. Nonlinear transverse vibration of axially accelerating strings with exact internal resonances and longitudinally varying tensions. Nonlinear Dyn 76, 1443–1468 (2014). https://doi.org/10.1007/s11071-013-1220-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1220-1