
Abstract
In this paper, a hybrid control strategy using both state feedback and parameter perturbation is applied to control the Hopf bifurcation in a dual model of Internet congestion control system. By choosing communication delay as a bifurcation parameter, it is proved that when it passes through a critical value, a Hopf bifurcation occurs. However, by adjusting the control parameters of the hybrid control strategy, the Hopf bifurcation has been delayed without changing the original equilibrium point of the system. Theoretical analysis and numerical results show that this method can delay the onset of bifurcation effectively. Therefore, it can extend the stable range in parameter space and improve the performance of congestion control system.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
With the rapid development of the Internet, the Internet congestion control algorithm has become a subject of intense research activities [1, 2]. One of the important properties of congestion control algorithm is stability [3]. In particular, the local asymptotic stability with communication delays is widely studied by linearizing the model around the equilibrium point [1, 2, 4, 5]. When the congestion control system loses its local stability, it causes some nonlinear dynamical behaviors such as chaos and bifurcation [1, 2, 4–11]. Such a kind of unstable phenomenon degrades the performance of network [6]. For example, in [12], the period-doubling bifurcation leads to the chaos state. In [1, 2, 4–11], the Hopf bifurcations change the stability of Internet congestion control model. Therefore, it is very significant to study the problem of bifurcation and chaos in the Internet congestion control system.
In reality, these complex dynamic behaviors mean that the system changes from a stable state to an unstable one, which may be harmful to the system [2]. So, in order to delay the onset of such an unstable phenomenon and enlarge the stable range of the Internet congestion control system, many effective control methods have been proposed, such as delay feedback control method [13, 14], heterogeneous delay approach [11, 15, 16], dynamic delayed feedback control [3, 17], and hybrid control strategy [12, 18–21]. Especially, the hybrid control has also been widely used in recent years. In [12, 18, 19], a hybrid control method has been used to control bifurcation and chaos in discrete nonlinear dynamical systems, and in [18], the authors have applied hybrid control to a continuous nonlinear dynamical system. In [20], hybrid control of bifurcation is considered in a predator–prey system with three delays. In [21], a parameter perturbation control and a hybrid control are proposed.
The main contribution of this paper is that a hybrid control strategy using both state feedback and parameter perturbation is applied to control the Hopf bifurcation in a first-order dual model of congestion control system. Here we choose the communication delay as a bifurcation parameter. Because the round-trip delay varies depending on the network’s congestion status, the system may exhibit complex behaviors in practice [4]. By using this strategy, first, we increase the critical value of communication delay and delay the onset of undesirable Hopf bifurcation. Second, we extend the stable range and improve the performance of the Internet congestion control system. Therefore, this control strategy is applicable in practice.
The rest of this paper is organized as follows. In Sect. 2, we summarize some properties of the original uncontrolled Internet congestion control system. In Sect. 3, the proposed hybrid control strategy is applied to the dual model, and the Hopf bifurcation of the controlled system is studied. In Sect. 4, by applying the center manifold theorem and the normal form theory, the stability of bifurcating solutions and the direction of the Hopf bifurcation are analyzed. Finally, numerical examples and conclusion remarks are given in Sects. 5 and 6, respectively.
2 Hopf bifurcation in uncontrolled model
In this section, we consider a first-order dual model of the Internet congestion control systems, the model can be formulated as follows [2]:
where \(p(t)\) is the price at the link (packets), and \(x(t)=f(p(t))=1/p(t)\) is a nonnegative continuous, strictly decreasing demand function and has at least third-order continuous derivatives (1/packets). The scalar \(c\) is the capacity of the bottleneck link (packets/s), and \(k\) is a gain parameter. \(\tau \) is the round-trip time which consists of the propagation delay and queuing delay (s).
Let \(p^*\) be the nonzero equilibrium point of system (1). It then satisfies the following equation:
For convenience, the results of system (1) are summarized as follows. The analysis of specific details for the system (1) has been described in [2].
Theorem 1
For the system (1), when \(\tau _0 =-\frac{\pi }{2b_2 }\) and \(\omega _0 =-b_2 \), we can get the following results in [2]:
-
(i)
When \(\tau <\tau _0 \), the equilibrium point of the system (1) is locally asymptotically stable;
-
(ii)
When \(\tau =\tau _0 \), the system (1) exists a Hopf bifurcation;
-
(iii)
When \(\tau >\tau _0 \) the equilibrium point of the system (1) is unstable and a limit cycle exists.
3 Hybrid control of bifurcation
Equation (1) is donated as
Now, the hybrid control strategy is added to the model (2), and then we can obtain the following controlled system:
where \(\alpha \) is a control parameter. The system (3) has the same fixed points as the original system (1) [21]. So, we know
Set \(u(t)=p(t)-p^*\), and then Eq. (3) is expanded by a Taylor expansion around the equilibrium point \(p^*\), we can get
where
Consider the linear part of Eq. (5)
The characteristic equation of Eq. (6) is
Lemma 1
When \(\tau =\tau _0 ,\,\lambda =\pm i\omega _0 ,\omega _0 >0\) are pure imaginary roots of Eq. (7).
Proof
Assume that Eq. (7) has pure imaginary roots, i.e., \(\lambda =\pm i\omega \), \(\omega >0\). Then substituting them into Eq. (7) and separating the real and imaginary parts, it is straightforward to get
From Eq. (8), we obtain
\(\square \)
Lemma 2
Equation (7) has roots with positive real parts except for \(\tau =\tau _0 \).
Proof
Let \(\lambda =\beta +i\omega \) be a root of Eq. (7) with \(\beta >0\) and \(\omega >0\), then
From the first equation of Eq. (11), we get
and from the second equation of Eq. (11), we get
Therefore, Eq. (7) may have positive real parts except for \(\tau =\tau _0 \) . Finally, we will show that the transversality condition of the Hopf bifurcation is also satisfied. \(\square \)
Lemma 3
Let \(\lambda =\beta +i\omega \) be the root of Eq. (7), the following transversality condition holds:
Proof
Therefore, evaluating
Hence, let \(\lambda =\beta +i\omega \) be the root of Eq. (7), we have
From Eq. (12), we can get
and
When \(\tau =\tau _0 ,\beta =0\), and \(\omega _0 \tau _0 =-\omega _0 /a_2 \), then we obtain the following formula:
and
It is well known that when \(\tau >\tau _0 \), the characteristic equation of Eq. (6) has at least one root with positive real parts. At the same time, the equilibrium point of the system (3) is unstable and a limit cycle bifurcates out from the equilibrium point. \(\square \)
Based on above analysis, we can get the following theorem. When \(\alpha =1\), the controlled system (3) becomes the original uncontrolled system (1). The conclusion is as Theorem 1.
Theorem 2
For the controlled system (3), we can easily obtain
-
(i)
When \(\tau \in [0,\tau _0 )\), the equilibrium point \(p^*\) of the controlled system (3) is locally asymptotically stable;
-
(ii)
When \(\tau =\tau _0 \), the controlled system (3) exists a Hopf bifurcation at equilibrium point \(p^*\);
-
(iii)
When \(\tau \in ( {\tau _0 ,+\infty })\), the equilibrium point \(p^*\) of the controlled system (3) is unstable.
4 Stability and direction of bifurcating periodic solutions
In this section, the normal form theory and the center manifold theorem are used to analyze the direction of the bifurcation and the stability of bifurcating periodic solutions of the controlled system (3). The analysis process is as follows.
In order to simplify calculation, let \(\tau =\tau _0 +\mu \). So \(\mu =0\) is the value of Hopf bifurcation for Eq. (6). Let
and
Therefore, the system (5) can be written in the following form:
According to the Riesz representation theorem, there is a function of bounded variation \(\eta (\theta ,\mu )\) with \(\theta \in [-\tau ,0]\) such that
which can be satisfied by choosing
where \(\delta \) is the Dirac delta function.
For arbitrary \(\phi \in C^1([-\tau ,0],\mathrm{R})\), define
and
Hence, we can rewrite Eq. (5) as
where \(u_t =u(t+\theta ),\,\theta \in [-\tau ,0]\).
For arbitrary \(\psi \in C^1([0,\tau ],\mathrm{{R}}),\) the adjoint operator \(A\)* of \(A\) is defined as
For arbitrary \(\phi \!\in \! C^1([-\tau ,0],\mathrm{R})\) and \(\psi \!\in \! C^1([0,\tau ],\mathrm{R})\), an inner product is defined as follows:
where \(d\eta (\theta )=d\eta (\theta ,0)\).
In order to determine the Poincare normal form of the operator \(A(0)\), we need to compute the eigenvector \(q(\theta )\) of \(A(0)\) associated with the eigenvalue \(i\omega _0 \) and the eigenvector \(q^*(s)\) of \(A^*(0)\) associated with the eigenvalue \(-i\omega _0 \). We can easily get
and
Now, we can prove that \(\left\langle {q^*,\bar{q}} \right\rangle =1\) and \(\left\langle {q^*,q} \right\rangle =0\). From Eq. (19), we have
So, let \(B=\frac{1}{1+a_2 \tau \exp (i\omega _0 \tau )}\), we can obtain \(\left\langle {q^*,q} \right\rangle =1\).
Similarly, we need to prove that \(\left\langle {q^*,\bar{q}} \right\rangle =0\). Also by using Eq. (19), we get
Since \(A(0)q(0)=i\omega _0 q(0)\) and \(A^*(0)q(0)=-i\omega _0 q^* (0)\), we get
and
Hence
Therefore \(\left\langle {q^*,\bar{q}} \right\rangle =0\). This completes the proof.
In the following, let \(u_t \) be the solution of Eq. (18) at \(\mu =0\), we define
and
Then, on the manifold \(C_0 \), we have
where
Here \(z\) and \(\overline{z} \) are local coordinates for \(C_0 \) and \(C\) in the directions of \(q\) and \(\overline{q^*} \), respectively. Note that \(W\) is real if \(u_t \) is real; we deal with real solutions only. At \(\mu =0\), it is easy to get
Equation (21) is simply written as
where
Following the algorithms in [22], we have
By using Eqs. (18) and (22), we obtain
which is rewritten as
where
On the other hand, on \(C_{0}\)
Using Eqs. (20) and (22) to replace \(W_{z},\,\dot{z}\), and their conjugates by their power series expansions, we get a second expression for \(\dot{W}\):
Comparing the coefficients of the above equation with those of Eq. (25), we get
Observing
which we obtain \(u_t (0)\) and \(u_t (-\tau )\)
As we only need the coefficients of \(z^2\), \(z\bar{z}\), \(\bar{z}^2\), and \(z^2\bar{z}\), we keep these relevant terms in the following expansions:
Therefore, we have
Comparing above coefficients with those in Eq. (23), we get
We still need to compute \(W_{20} (0)\), \(W_{20} (-\tau )\), \(W_{11} (0)\) and \(W_{11} (-\tau )\) for the expression of \(g_{21} \). For \(\theta \in [-\tau ,0)\),
Comparing the coefficients of above equation with those of Eq. (26), we obtain
From Eqs. (16) and (29), we get
and
Solving the Eqs. (34) and (35), we have
and
where \(E_{1}\) and \(E_{2}\) are both constants and can be determined by setting \(\theta =0\) in \(H(z,\bar{z},\theta )\). It is evident that
Thus,
From Eq. (29) and recall that
We get
and
Substituting Eq. (36) into Eq. (40), we obtain
where
Similarly, substituting Eq. (37) into Eq. (41), we get
where
Therefore, we have formulas to compute the following parameters:
where \(\mu _2 >0(<0)\) is the Lyapunov coefficient. Now we give the main results of this section.
Theorem 3
For the controlled system (3), we summarize the above analysis:
-
(i)
If \(\mu _2 >0(<\)0), the Hopf bifurcation is supercritical (subcritical), and the bifurcating periodic solutions exist for \(\tau >\tau _0 (\tau <\tau _0 )\), i.e., \(\mu _2 \) determines the direction of the Hopf bifurcation.
-
(ii)
If \(\beta _2 <0(>\)0), the bifurcating periodic solutions are stable (unstable), i.e., \(\beta _2 \) determines the stability of the bifurcating periodic solution.
-
(iii)
If \(T_2 >0(<\)0), the period increases (decreases), i.e., \(T_2\) determines the period of the bifurcating periodic solution.
5 Numerical simulations
In this section, we illustrate the effectiveness of the hybrid control by numerical simulation. For comparison, we choose the same parameter as [2], i.e., \(x(t)=1/p(t),\) \(c=50,\) \(k=0.01.\)
First we choose \(\alpha =1\), therefore, the system is the uncontrolled model. By direct calculation we can get
Figures 1 and 2 illustrate the dynamic behaviors of the uncontrolled model (1). The simulation results are as follows:
-
(i)
When \(\tau <\tau _0 \), the equilibrium point is asymptotically stable (see Fig. 1);
Fig. 1 
Waveform plot and phase portrait of uncontrolled system (1) with \(\tau =2.9\)
Fig. 2 
Waveform plot and phase portrait of uncontrolled system (1) with \(\tau =3.35\), the equilibrium loses its stability
-
(ii)
When \(\tau \) passes through \(\tau _0 \), the equilibrium point \(p^*\) loses its stability, and a Hopf bifurcation occurs (see Fig. 2);
-
(iii)
Since \(\mu _2 >0\) and \(\beta _2 <0\), the Hopf bifurcation is supercritical, and the bifurcating periodic solutions are stable.


Now we consider the influence of the hybrid control for the Hopf bifurcation. By choosing an appropriate control parameter, we can delay the onset of Hopf bifurcation without changing the original equilibrium point. For example, when choosing \(\alpha =1.3\), the system becomes the controlled model, the critical value \(\tau _0 \) increases from 3.1416 to 3.5561. By adjusting the control parameter, limit cycle in the uncontrolled system (see Fig. 2) becomes an asymptotically stable equilibrium point in the controlled system (see Fig. 3). Moreover, the bifurcation diagram of uncontrolled system and controlled system are obtained in Figs. 4 and 5, respectively. It is shown that the onset of the Hopf bifurcation is delayed, and the stable range in parameter space is extended.

Waveform plot and phase portrait of controlled system (3) with \(\alpha =1.3\) and \(\tau =3.35\), the equilibrium is asymptotically stable
When choosing \(\alpha =1.5\), for the controlled model, we obtain
It is seen from Figs. 6 and 7 that when \(\tau =3.9\), the equilibrium point of the controlled system (3) is asymptotically stable. When \(\tau \) passes the critical value \(\tau _0 =4.1153\), a Hopf bifurcation occurs.

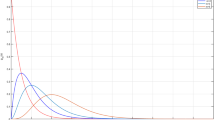
Bifurcation diagram of uncontrolled system (1) with \(\tau =\tau _0 =3.14\)

Bifurcation diagram of controlled system (3) with \(\alpha =1.3\) and \(\tau =\tau _0 =3.5561\)

Waveform plot and phase portrait of controlled system (3) with \(\alpha =1.5\) and \(\tau =3.9\)

Waveform plot and phase portrait of controlled system (3) with \(\alpha =1.5\) and \(\tau =4.3\)
The relationship between the critical value \(\tau _0 \) and the control parameter \(\alpha \) is shown in Fig. 8. From this Fig. 8 we know that when increasing \(\alpha \), the critical value increases. For example, by choosing \(\alpha =1.85\), the critical value is \(\tau _0 =7.4991\). In detail, we choose \(\tau =6\) and \(\alpha =1.85\), we can see the Hopf bifurcation is delayed from Fig. 9.
Finally we can draw the conclusion that the controlled system (3) is more stable than uncontrolled system (1). Limit cycle in the uncontrolled system becomes an asymptotically stable equilibrium point in the controlled system.
Thus, by the control strategy, first, we can increase the critical value of communication delay and delay the onset of undesirable Hopf bifurcation. Second, we extend the stable range in parameter and guarantee a stable sending rate for a larger delay. It is suitable for future high bandwidth-delay-product networks which may have a large communication delay in the networks. The proposed control method can also be used to study the higher dimensional nonlinear time-delay systems.

The fluctuation of \(\tau _0 \) depending on \(\alpha \)

Waveform plot and phase portrait of controlled system (3) with \(\alpha =1.85\) and \(\tau =6\)
6 Conclusions
In this paper, a hybrid control strategy is used to control the Hopf bifurcation in a dual model of Internet congestion control system. By choosing an appropriate control parameter, we can delay the onset of Hopf bifurcation. It has been shown that the hybrid control can effectively control Hopf bifurcation. Furthermore, by the normal form theory and the center manifold theorem, we analyze the stability and direction of periodic solutions bifurcating. Finally, numerical simulations have demonstrated the correctness of theoretical analysis.
References
Hu, H.J., Huang, L.H.: Linear stability and Hopf bifurcation in an exponential RED algorithm model. Nonlinear Dyn. 59, 463–475 (2010)
Ding, D.W., Zhu, J., Lou, X.S., Liu, Y.L.: Delay induced Hop bifurcation in a dual model of internet congestion control algorithm. Nonlinear Anal. Real World Appl. 10, 2873–2883 (2009)
Guo, S.T., Feng, G., Liao, X.F., Liu, Q.: Hopf bifurcation control in a congestion control model via dynamic delayed feedback. Chaos 18, 043104 (2008)
Ding, D.W., Zhu, J., Luo, X.S.: Hopf bifurcation analysis in a fluid flow model of internet congestion control algorithm. Nonlinear Anal. Real World Appl. 10, 824–839 (2009)
Liu, F., Guan, Z.H., Wang, H.O.: Stability and Hopf bifurcation analysis in a TCP fluid model. Nonlinear Anal. Real World Appl. 12, 353–363 (2011)
Liu, Y.L., Zhang, H., Zhu, J.: Dynamical character of an improved time-delayed dual model for internet congestion control. Chin. J. Comput. Phys. 27, 940–946 (2010)
Ding, D.W., Zhu, J., Luo, X.S., Huang, L.S., Hu, Y.J.: Nonlinear dynamics in internet congestion control model with TCP Westwood under RED. J. China University Post Telecom. 16, 53–58 (2009)
Pei, L.J., Mu, X.W., Wang, R.M., Yang, J.P.: Dynamics of the internet TCP-RED congestion control system. Nonlinear Anal. Real World Appl. 12, 947–955 (2011)
Wang, Z.F., Chu, T.G.: Delay induced Hopf bifurcation in a simplified network congestion control model. Chaos Solitons Fractals 28, 161–172 (2006)
Liu, F., Wang, H.O., Guan, Z.H.: Hopf bifurcation control in the XCP for the internet congestion control system. Nonlinear Anal. Real World Appl. 13, 1466–1479 (2012)
Dong, T., Liao, X.F., Huang, T.W.: Dynamics of a congestion control model in a wireless access network. Nonlinear Anal. Real World Appl 14, 671–683 (2013)
Luo, X.S., Chen, G.R., Wang, B.H., Fang, J.Q.: Hybrid control of period-doubling bifurcation and chaos in discrete nonlinear dynamical systems. Chaos Solitons Fractals 18, 775–783 (2003)
Zhao, H.Y., Xie, W.: Hopf bifurcation for a small-world network model with parameters delay feedback control. Nonlinear Dyn. 63, 345–357 (2011)
Zhen, Z.Q., Zhu, J., Li, W.: Stability and bifurcation analysis in a FAST TCP model with feedback delay. Nonlinear Dyn. 70, 255–267 (2012)
Guo, S.T., Deng, S.J., Liu, D.F.: Hopf and resonant double Hopf bifurcation in congestion control algorithm with heterogeneous delays. Nonlinear Dyn. 61, 553–567 (2010)
Guo, S.T., Zheng, H.Y., Liu, Q.: Hopf bifurcation analysis for congestion control with heterogeneous delays. Nonlinear Anal. Real World Appl. 11, 3077–3090 (2010)
Nguyen, L.H., Hong, K.S.: Hopf bifurcation control via a dynamic state-feedback control. Phys. Lett. A. 376, 442–446 (2012)
Liu, Z.R., Chung, K.W.: Hybrid control of bifurcation in continuous nonlinear dynamical systems. Int. J. Bifurc. Chaos. 15, 3895–3903 (2005)
Ding, D.W., Zhu, J., Luo, X.S.: Hybrid control of bifurcation and chaos in stroboscopic model of Internet congestion control system. Chin. Phys. 17, 105–110 (2008)
Zhang, L.P., Wang, H.N., Xu, M.: Hybrid control of bifurcation in a predator–prey system with three delays. Acta Phys. Sin. 60, 010506 (2011)
Li, N., Yuan, H.Q., Sun, H.Y., Zhang, Q.L.: Adaptive control of bifurcation and chaos in a time-delayed system. Chin. Phys. B. 22, 030508 (2013)
Hassard, B.D., Kazarinoff, N.D., Wan, Y.H.: Theory and Application of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
Acknowledgments
This paper was supported by NSFC-Guangdong Joint Fund (No:U1201255), the National Natural Science Foundation of China (No:61201227 and No:61172127), the Natural Science Foundation of Anhui (No:1208085MF93) (No:1208085MF93), 211 Innovation Team of Anhui University (No: KJTD007A and No:KJTD001B), Young-backbone Teacher Project of Anhui University, The Doctoral Scientific Research Foundation of Anhui University.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ding, DW., Qin, XM., Wang, N. et al. Hybrid control of Hopf bifurcation in a dual model of Internet congestion control system. Nonlinear Dyn 76, 1041–1050 (2014). https://doi.org/10.1007/s11071-013-1187-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1187-y