
Abstract
The asymptotic stability and stabilization problem of a class of fractional-order nonlinear systems with Caputo derivative are discussed in this paper. By using of Mittag–Leffler function, Laplace transform, and the generalized Gronwall inequality, a new sufficient condition ensuring local asymptotic stability and stabilization of a class of fractional-order nonlinear systems with fractional-order α:1<α<2 is proposed. Then a sufficient condition for the global asymptotic stability and stabilization of such system is presented firstly. Finally, two numerical examples are provided to show the validity and feasibility of the proposed method.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently fractional-order systems have attracted increasing interests from scientists and engineers. The essential difference between the fractional-order derivation model and integer-order derivation lies in the following two aspects. First, the integer-order derivative indicates a variation or certain attribute at particular time for a physical or mechanical process, while fractional-order derivative is concerned with the whole time domain. Second, integer-order derivative describes the local properties of a certain position for a physical process, while fractional-order derivative is related to the whole space. It is therefore that many real-world physical systems are well characterized by fractional-order state equations [1–4], for example, fractional-order Schrödinger equation [5] in quantum mechanics, fractional-order oscillator equation [6] in damping vibration, fractional Lotka–Volterra equation [7] in biological systems, fractional Langevin equation [8] in anomalous diffusion and so on. In particularly, stability analysis is one of the most fundamental and important issues for systems. In spite of extensive researches, nonlinear stability of fractional order systems remains a formidable problem. In recent years, there are many results about the stability of fractional-order linear time invariant systems [9–15]. However, only in certain cases or under some special circumstances, the practical problems may be regarded as linear systems. Therefore, research on nonlinear dynamics not only is of great significance, but also has important value in application.
It is well known that the analysis on stability of fractional-order systems is more complex than that of classical differential equations, since fractional derivatives are nonlocal and have weakly singular kernels. Especially, the development on stability of nonlinear fractional-order equations is a bit slow [16]. Up to now, few authors investigated the stability of fractional-order nonlinear system and obtained some useful results. Li et al proposed the definition of Mittag–Leffler stability and introduced the fractional Lyapunov direct method to discuss stability of fractional-order nonlinear systems [17]. Then Sadati et al. [18] and Liu et al. [19] studied Mittag–Leffler stability of the fractional nonlinear delayed systems and fractional nonlinear neutral singular systems, respectively. By using Bihari’s inequality and Bellman–Gronwall’s inequality, rather than Laplace transform and inverse Laplace transform, Delavari et al. presented an extension of Lyapunov direct method for the Caputo type fractional-order nonlinear system [20], which overcome some limitations in [17] and have important values in theory. However, in practice, to select a suitable Lyapunov function and calculate its fractional derivative for fractional-order system are very inconvenient. Wen et al. considered the stability and stabilization of nonlinear fractional-order dynamical systems with fractional-order α:0<α<1 [21]. Deng derived sufficient conditions for the local asymptotical stability of nonlinear fractional-order systems with fractional-order α:0<α<1 [22]. Chen et al. obtained two sufficient criteria on the asymptotical stability and stabilization of a class of fractional-order nonlinear systems with fractional-order α:0<α<1 and α:1<α<2, respectively [23]. Zhao et al. studied the stabilization of nonlinear fractional order dynamic systems [24].
Note that these literatures on the stability of fractional order systems mainly concentrated on fractional-order α belonging to 0<α<1. In fact, not all the fractional differential systems have fractional orders in 0<α<1. There exist fractional-order models described by fractional order α lying in 1<α<2, for example, super-diffusion [25]. However, as far as we know, there are few results on stability and stabilization of fractional-order nonlinear systems with the order α belonging to 1<α<2. [23] obtained sufficient conditions for such asymptotical stability of fractional-order nonlinear systems, but these results are local. Here, by using Mittag–Leffler function, Laplace transform, and the Gronwall inequality, two sufficient conditions for the local and global asymptotic stability and stabilization of a class of fractional-order nonlinear systems with fractional-order α:1<α<2 are presented, respectively.
The remainder of this paper is organized as follows. In Sect. 2, some necessary definitions, lemmas are presented. Main results are proposed in Sect. 3. In Sect. 4, two examples and corresponding numerical simulations are used to illustrate the validity and feasibility of the proposed method. Finally, conclusions are drawn in Sect. 5.
2 Preliminaries
There are some definitions for fractional derivatives. The commonly used definitions are Grunwald–Letnikov (GL), Riemann–Liouville (RL), and Caputo (C) definitions.
Definition 1
The fractional integral (Riemann–Liouville integral) \(D_{t_{0}, t}^{-\alpha}\) with fractional order α∈R + of function x(t) is defined as
where Γ(⋅) is the gamma function, \(\varGamma(\tau)= \int_{0}^{\infty}t^{\tau-1}e^{-t}\,dt\).
Definition 2
The Riemann–Liouville derivative of fractional order α of function x(t) is given as
where n−1≤α<n∈Z +.
Definition 3
The Caputo derivative of fractional order α of function x(t) is defined as follows:
where n−1≤α<n∈Z +.
The Laplace transform of Caputo fractional derivatives \(_{C}D_{t_{0},t}^{\alpha}x(t)\) is given as follows:
Grunwald–Letnikov (GL) definition is difference scheme and suitable for numerical calculations, Riemann–Liouville (RL) definition takes the form of differential-integral and plays an important role in theory analysis. Throughout the paper, only the Caputo definition is used since this Laplace transform allows for initial conditions taking the same forms as those for integer-order derivatives, which have clear physical interpretations and have a wide range of applications in the process of factual modeling. The notation \(\frac{d^{\alpha}}{dt^{\alpha}}\) is chosen as the Caputo fractional derivative operator \({}_{C}D_{0,t}^{\alpha}\).
In order to obtain main results, the following definitions and lemmas are presented firstly.
Similar to the exponential function frequently used in the solutions of integer-order systems, a function frequently used in the solutions of fractional order systems is the Mittag–Leffler function.
Definition 4
Mittag–Leffler function is defined as
where α>0 and z∈C.
The Mittag–Leffler function with two parameters appears most frequently and has the following form:
where α>0,β>0, and z∈C. When β=1, one has E α (z)=E α,1(z), further, E 1,1(z)=e z.
Moreover, the Laplace transform of Mittag–Leffler function in two parameters is
where t and s are, respectively, the variables in the time domain and Laplace domain, \(\mathcal {L}\{\cdot\}\) stands for the Laplace transform.
Lemma 1
([1])
If 0<α<2, β is an arbitrary real number, μ satisfies \(\pi\alpha/2<\mu<\rm min\{\pi, \pi\alpha\}\), and C 1,C 2 are real constants, then
where |arg(z)|≤μ, |z|≥0.
Lemma 2
([26])
The following properties hold.
-
(i)
There exist finite real constants M 1,M 2≥1 such that for any 0<α<1,
$$\begin{aligned} \begin{aligned} &E_{\alpha,1}\bigl(At^\alpha\bigr)\leq M_1 \bigl\|e^{At}\bigr\|, \\ &E_{\alpha,\alpha}\bigl(At^\alpha\bigr)\leq M_2\bigl\|e^{At}\bigr\|, \end{aligned} \end{aligned}$$(9)where A denotes matrix, ∥⋅∥ denotes any vector or induced matrix norm.
-
(ii)
If α≥1, then for β=1,2,α
$$\begin{aligned} E_{\alpha,\beta}\bigl(At^\alpha\bigr)\leq \bigl\|e^{At^{\alpha}}\bigr\|. \end{aligned}$$(10)
Lemma 3
([27])
Suppose α>0, a(t) is a nonnegative function locally integrable on 0≤t<T (some T≤+∞) and g(t) is a nonnegative, nondecreasing continuous function defined on 0≤t<T, g(t)≤M(constant), and suppose u(t) is nonnegative and locally integrable on 0≤t<T with
on this interval. Then
Moreover, if a(t) is a nondecreasing function on [0,T), then
3 Main results
Consider the following fractional-order nonlinear system:
where x(t)=(x 1(t),x 2(t),…,x n (t))T∈R n denotes the state vector of the state system, f:R n→R n defines a nonlinear vector field in the n-dimensional vector space, fractional-order α belongs to 1<α<2. A∈R n×n is a constant matrix, Ax(t) and h(x(t)) denote linear and nonlinear parts of f(x(t)).
3.1 Stability of fractional-order nonlinear systems
Theorem 1
System (14) is locally asymptotically stable, if
-
(i)
h(x(t)) satisfies h(0)=0 and \(\lim_{x\rightarrow 0}\frac{\|h(x(t))\|}{\|x(t)\|} =0\);
-
(ii)
Reλ(A)<0 and ω=−max{Reλ(A)}>(Γ(α))1/α.
Proof
Assume the initial conditions be x (k)(0)=x k (k=0,1), the solution of (14) can be obtained by taking the Laplace transform and inverse Laplace transform on (14)
From Lemma 2, one has
Since A is a stability matrix, there exists N>0 such ∥e At∥≤Ne −ωt and
Combining (16) with (17), one obtains
Multiplying by e ωt both sides of (18), one yields
Based on the properties of \(\lim_{x\rightarrow 0}\frac{\|h(x(t))\|}{\|x(t)\|}=0\), there exists a constant δ>0, such that
Substituting (20) into (19), one gets
According to Lemma 3, and denote a(t)=N∥x 0∥+N∥x 1∥t, g(t)=1, u(t)=e ωt∥x(t)∥, one obtains
Then it follows from Lemma 1 that there exist two real constants C 1,C 2>0 such that
That is,
Based on Condition (ii), ∥x(t)∥→0 as t→+∞, which implies that system (14) is locally asymptotically stable. □
Theorem 2
System (14) is globally asymptotically stable, if
-
(i)
h(x(t)) satisfies h(0)=0, and is global Lipschitz with Lipschitz constant L, i.e., |h(x 1)−h(x 2)|≤L|x 1−x 2| for ∀x 1,x 2∈R;
-
(ii)
Reλ(A)<0 and ω=−max{Reλ(A)}>(NLΓ(α))1/α, in which N satisfies ∥e At∥≤Ne −ωt.
Proof
Similar to Theorem 1, the solution of (14) can be obtained by taking the Laplace transform and inverse Laplace transform on (14)
It follows from Lemma 2 and Condition (i) that
Due to A is a stability matrix, then ∥e At∥≤Ne −ωt and
Substituting (27) into (26), one gets
Multiplying by e ωt both sides of (28), one has
Based on Lemma 3, and let a(t)=N∥x 0∥+N∥x 1∥t, g(t)=LN, u(t)=e ωt∥x(t)∥, it yields
Then, according to Lemma 1, there exist two real constants C 1,C 2>0 such that
which is equivalent to
Therefore, from Condition (ii), when t→+∞, ∥x(t)∥→0, which implies system (14) is globally asymptotically stable. □
3.2 Stabilization of fractional-order nonlinear systems
The fractional-order system (14) is said to be stabilization via linear state-feedback control if there exists a state-feedback controller u(t)=Kx(t) such that the closed-loop system
is asymptotically stable, where feedback gains K need to be determined, \(\tilde{A}=A+BK\).
Therefore, our aim is to design a suitable feedback gain matrix K such that the controlled system (33) is asymptotically stable.
Theorem 3
If feedback gains K is chosen such that the following conditions hold:
-
(i)
h(x(t)) satisfies h(0)=0 and \(\lim_{x\rightarrow 0}\frac{\|h(x(t))\|}{\|x(t)\|}=0\);
-
(ii)
\(\mathit{Re}{\lambda(\tilde{A})}<0\) and \(\omega=-\max \{\mathit{Re}{\lambda(\tilde{A})}\}> (\varGamma(\alpha))^{1/\alpha}\), then controlled system (33) is locally asymptotically stable.
Proof
The process of the proof is similar to that of Theorem 1, so we omit it here. □
Theorem 4
If feedback gains K is chosen such that the following conditions hold,
-
(i)
h(x(t)) satisfies h(0)=0 and is global Lipschitz with Lipschitz constant L, i.e., |h(x 1)−h(x 2)|≤L|x 1−x 2| for ∀x 1,x 2∈R;
-
(ii)
\(\mathit{Re}{\lambda(\tilde{A})}<0\) and \(\omega=-\max \{\mathit{Re}{\lambda(\tilde{A})}\}> (NL\varGamma(\alpha))^{1/\alpha}\), in which N satisfies \(\|e^{\tilde{A}t}\|\leq Ne^{-\omega t}\), then controlled system (33) is globally asymptotically stable.
Proof
The process of the proof is similar to that of Theorem 2, it is omitted here. □
Remark 1
Although [23] obtained the sufficient conditions for ensuring the asymptotical stability and stabilization of system (14) and controlled system (33), respectively, these results are also local. Here, we derive the sufficient conditions on the global asymptotic stability of fractional order nonlinear systems.
4 Numerical examples
In this section, to verify and demonstrate the effectiveness of the proposed method, we apply them to stabilizing fractional-order chaotic Lü system with fractional-order α=1.1 and fractional-order chaotic Lorenz system with fractional-order α=1.05, respectively. Here, an improved predictor-corrector algorithm proposed by Deng [28] is applied.
The so-called Lü system is known as a bridge between the Lorenz system and Chen system [29]. Its fractional version [30] is described as follows:
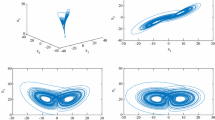
when the parameters are chosen as a=36, b=3, c=20, and α=1.1, system (34) displays a chaotic attractor, as shown in Fig. 1.

Chaotic behaviors of fractional-order chaotic Lü system (34) with fractional-order α=1.1
System (34) can be also rewritten as (14), in which
It is very easy to verify that
which implies that h(x) satisfies Conditions (i). It follows from Theorem 3 and pole placement technique that feedback gain is selected as
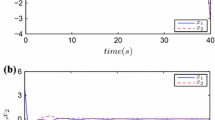
which satisfies the conditions Re(λ(A))<0 and ω=−max{λ(A+BK)}=1>0.9557=(Γ(α))1/α. Simulation results are depicted in Fig. 2, which show that the zero solution of the controlled system is locally asymptotically stable.

Stabilization of fractional-order chaotic Lü system (34)
Fractional-order Lorenz system[31] can be described by
when the parameters are chosen as a=10, b=28, c=8/3, and α=1.05, system (37) displays a chaotic attractor, as shown in Fig. 3.

Chaotic behaviors of fractional-order chaotic Lorenz system (37) with fractional-order α=1.05
Systems (37) can also be rewritten as (14), in which
Based on the boundedness of chaotic systems, there exist a real constant L such that
which implies that h(x) satisfies Lipschitz-conditions. From phase diagram, L is taken to be 20. In the simulation, according to Theorem 4, feedback gain is selected as
By using simple calculation, ∥e (A+BK)∥≤e −17.6667t and ω=−max{Reλ(A+BK)}=17.6667>16.9032=(20×Γ(1.05))1/1.05, which satisfies Conditions (i). Simulation results are displayed in Fig. 4, which show that the zero solution of the controlled system is globally asymptotically stable.

Stabilization of fractional-order chaotic Lorenz system (37)
5 Conclusion
In this paper, based on the Mittag–Leffler function, the generalized Gronwall inequality and property of fractional calculus, two sufficient stability theorems of a class of nonlinear fractional-order differential systems with fractional-order α:1<α<2 have been given. It should be pointed out that the global stability of such systems is investigated for the first time. And the corresponding criteria have been derived to construct the linear state feedback controller that can stabilize such systems. Simulation results have illustrated the effectiveness of the results and the proposed control method.
References
Podlubny, I.: Fractional Differential Equations. Academic Press, San Diego (1999)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Application of Fractional Differential Equations. Elsevier, New York (2006)
Hilfer, R.: Applications of Fractional Calculus in Physics. World Scientific, Singapore (2000)
Caputo, M.: Linear models of dissipation whose Q is almost frequency independent, II. Geophys. J. R. Astron. Soc. 13, 529–539 (1967)
Naber, M.: Time fractional Schrödinger equation. J. Math. Phys. 45, 3339–3352 (2004)
Ryabov, Y., Puzenko, A.: Damped oscillation in view of the fractional oscillator equation. Phys. Rev. B 66, 184–201 (2002)
Das, S., Gupta, P.: A mathematical model on fractional Lotka–Volterra equations. J. Theor. Biol. 277, 1–6 (2011)
Burov, S., Barkai, E.: Fractional Langevin equation: overdamped, underdamped, and critical behaviors. Phys. Rev. E 78, 031112 (2008)
Matignon, D.: Stability results for fractional differential equations with applications. In: Proc. IMACS-IEEE CESA, pp. 963–968 (1996)
Lu, J.G., Chen, Y.Q.: Robust stability and stabilization of fractional-order interval systems with the fractional order α: the 0<α<1 case. IEEE Trans. Autom. Control 55, 152–158 (2010)
Lu, J.G., Chen, G.R.: Robust stability and stabilization of fractional-order interval systems: an LMI approach. IEEE Trans. Autom. Control 54, 1294–1299 (2009)
Tavazoe, M.S., Haeri, M.: A note on the stability of fractional order systems. Math. Comput. Simul. 79, 1566–1576 (2009)
Ahn, H.S., Chen, Y.Q.: Necessary and sufficient stability condition of fractional-order interval linear systems. Automatica 44, 2985–2988 (2008)
Deng, W.H., Li, C.P., Lu, J.H.: Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 48, 409–416 (2007)
Kheirizad, I., Tavazoei, M.S., Jalali, A.A.: Stability criteria for a class of fractional order systems. Nonlinear Dyn. 61, 153–161 (2010)
Li, C.P., Zhang, F.R.: A survey on the stability of fractional differential equations. Eur. Phys. J. Spec. Top. 193, 27–47 (2011)
Li, Y., Chen, Y.Q., Podlubny, I.: Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 45, 1965–1969 (2009)
Sadati, S.J., Baleanu, D., Ranjbar, D.A., Ghaderi, R., Abdeljawad, T.: Mittag–Leffler stability theorem for fractional nonlinear systems with delay. Abstr. Appl. Anal. 2010, 108651 (2010)
Liu, S., Li, X.Y., Jiang, W., Zhou, X.F.: Mittag–Leffler stability of nonlinear fractional neutral singular systems. Commun. Nonlinear Sci. Numer. Simul. 10, 3961–3966 (2012)
Delavari, H., Baleanu, D., Sadati, J.: Stability analysis of Caputo fractional-order nonlinear systems revisited. Nonlinear Dyn. 67, 2433–2439 (2012)
Wen, X.J., Wu, Z.M., Lu, J.G.: Stability analysis of a class of nonlinear fractional-order systems. IEEE Trans. Circuits Syst. II, Express Briefs 55, 1178–1182 (2008)
Deng, W.H.: Smoothness and stability of the solutions for nonlinear fractional differential equations. Nonlinear Anal. 72, 1768–1777 (2010)
Chen, L.P., Chai, Y., Wu, R.C., Yang, J.: Stability and stabilization of a class of nonlinear fractional-order systems with Caputo derivative. IEEE Trans. Circuits Syst. II, Express Briefs 59, 602–606 (2012)
Zhao, L.D., Hu, J.B., Fang, J.A., Zhang, W.B.: Studying on the stability of fractional-order nonlinear system. Nonlinear Dyn. 70, 475–479 (2012)
Li, C.P., Zhao, Z.G., Chen, Y.Q.: Numerical approximation of nonlinear fractional differential equations with subdiffusion and superdiffusion. Comput. Math. Appl. 62, 855–875 (2011)
De la Sen, M.: About robust stability of Caputo linear fractional dynamic systems with time delays through fixed point theory. Fixed Point Theory Appl. 2011, 867932 (2011)
Ye, H., Gao, J., Ding, Y.: A generalized Gronwall inequality and its application to a fractional differential equation. J. Math. Anal. Appl. 328, 1075–1081 (2007)
Deng, W.H.: Numerical algorithm for the time fractional Fokker–Planck equation. J. Comput. Phys. 227, 1510–1522 (2007)
Lü, J., Chen, G., Cheng, D.: A new chaotic system and beyond: the generalized Lorenz-like system. Int. J. Bifurc. Chaos Appl. Sci. Eng. 14, 1507–1537 (2004)
Lu, J.G.: Chaotic dynamics of the fractional-order Lu system and its synchronization. Phys. Lett. A 354, 305–311 (2006)
Grigorenko, I., Grigorenko, E.: Chaotic dynamics of the fractional Lorenz system. Phys. Rev. Lett. 91, 034101 (2003)
Acknowledgements
The authors thank the referees and the editor for their valuable comments and suggestions. This work was supported by the National Natural Science Funds of China for Distinguished Young Scholar under Grant (No. 50925727), the National Natural Science Foundation of China (No. 61374135), the National Defense Advanced Research Project Grant (No. C1120110004, 9140 A27020211DZ5102), the Key Grant Project of Chinese Ministry of Education under Grant (No. 313018), the Fundamental Research Funds for the Central Universities (No. 2012HGCX0003), the Natural Science Foundation of Anhui Province (No. 11040606M12), and the 211 project of Anhui University (No. KJJQ1102).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chen, L., He, Y., Chai, Y. et al. New results on stability and stabilization of a class of nonlinear fractional-order systems. Nonlinear Dyn 75, 633–641 (2014). https://doi.org/10.1007/s11071-013-1091-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1091-5