
Abstract
Traditionally, elastomers are considered to be one of the best material candidates for the design of energy absorbing devices, due to their remarkable visco-elastic and extensibility material properties. This capability can be further enhanced by the design of appropriate Dielectric Elastomer Generators (DEGs). The present paper proceeds to another alternative direction, which consists of the design of appropriate elastomer structures with enhanced energy absorption capabilities, are attributed more to the appropriate non-linear design of the elastomer structure itself, than to the hyperelastic material properties of the elastomer members. For this reason, a simple chi-shaped in-plane elastic structure is considered, comprising one proof mass with four elastomer members attached to it, placed in a chi-shaped configuration, and being properly stretched. A systematic analysis is carried out, with respect to the variation of two basic structure design properties on the dynamic behavior: the orientation angle of the members and their initial pre-stress. The obtained results show that the variation of just these two basic parameters of the structure may lead to a quite rich and interesting non-linear dynamic behavior. More specifically, the traditional always-in-tension concept leads to a linear dynamic system response, even though the elastomer members are considered to have been made of a non-linear hyper-elastic material. Alternatively, a new partially-loose-member operating concept is analyzed. This concept suggests that some individual elastomer members be allowed to become loose for some period of the operating cycle, (but not all of them simultaneously), strongly enhancing the broadband energy absorbing capability of the structure itself.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Elastomers are rubbery materials composed of long chain-like molecules (polymers) and capable of recovering their original shape after being stretched to great extents (elastic polymers). This property, in combination with their remarkable visco-elastic material properties, renders elastomers as one of the best material candidates for the design of energy absorbing devices. Quite recently, this energy absorption property has been shown to be further combined with their ability to convert mechanical strain into electricity, therefore, turning the aforementioned absorbing devices into generators.
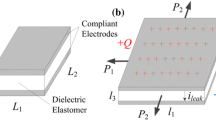
Toward this direction, substantial work can be found in the literature, such as that concerning dielectric elastomers. Dielectric Elastomers (DEs) is an interesting subcategory of elastomers, which exhibit very large strains under the appropriate application of voltage [1]. Apart from actuation, (DEs) can be used for producing electricity. Acrylic elastomers present an energy production up to 0.4 J/g, while advanced single crystal ceramics produce approximately 0.13 J/g and electromagnetics produce approximately 0.04 J/g [2]. In addition, (DEs) are able to scavenge about 10 times more than electrostrictive polymers and almost 100 times more than piezo-electric composites [3], while the estimated theoretical energy density of (DEs) is approximately 1.6–1.7 J/g [4, 5]. Therefore, using elastomers, and particularly (DEs), seems to be a very promising technology for energy absorption. This technology may also be combined with energy harvesting devices, such as the Wave Energy Converters (WEC), which extract energy from regular waves using oscillating floating bodies [6].
Up-to-date, energy absorbing devices are mainly designed as linear resonators, thus a slight shift of the excitation frequency will cause a dramatic reduction in their performance [7]. To overcome this drawback, broadband vibration-based solutions have been developed [7], covering resonance tuning, multimodal energy harvesting, frequency up-conversion, and techniques exploiting non-linear oscillations, such as those implementing a non-linear stiffness. Piezo-electric elements belong to this category of solutions [8–10]. More particular, Seuaciuc-Osorio and Daqaq [11] considered a piezo-electric stack-type absorber, subjected to a harmonic excitation of constant amplitude and sinusoidal frequency, and they obtained analytical expressions for the response, output voltage, and power of the absorber. Sebald et al. provided the solution, both in the frequency and in the time domain, for a particular piezo-electric electro-mechanical dimensionless Duffing oscillator model [12]. Wang et al. presented a type of vibration energy absorber combining a piezo-electric cantilever and a single degree of freedom (SDOF) elastic system. They showed that the power output can be increased and the frequency bandwidth can be improved if a larger lumped mass and a smaller damping ratio is implemented to the SDOF elastic system [13]. Daqaq explored the idea of intentionally introducing stiffness nonlinearities into a piezo-electric energy absorber for improving the absorbing performance especially in random and non-stationary vibratory environments. He concluded that, for large ratios, stiffness-type non-linearities have very little influence on the voltage response, while for small ratios a Duffing-type mono-stable absorber can never outperform its linear counterpart and a bi-stable absorber can outperform a linear absorber only under certain conditions [14]. Abdelkefi et al. investigated the level of energy absorption from a piezo-aeroelastic energy absorber and showed that the absorbed power can be increased by an order of magnitude by properly design choices [15].
Apart from piezo-electric energy absorbers and their variations, other interesting absorbers have been stated. Mann and Owens reported that, for a non-linear absorber with a bi-stable potential well, the non-linear phenomenon of escaping from a potential well broadens the frequency spectrum of the absorber [16]. Ramlan et al. showed that the effectiveness of non-linear absorbing devices over tuned linear devices cannot be greater than a fundamental limit [17]. Quinn et al. reported that it is possible to get significant performance gains if a non-linear cubic oscillator, instead of a tuned linear attachment, is embodied to an absorbing device [18]. Trigona et al. investigated the issue of energy absorption from ambient vibrations, considering both periodic and stochastic sources, and proposed a device of a large amplitude response over a broad range of frequencies [19]. Orazov et al. developed a hybrid system consisting of a pair of harmonically excited mass–spring–dashpot systems and a set of four state-dependent switching rules in order to investigate the dynamics of a simple ocean wave energy converter. They revealed an interesting response with respect to a wide spectrum of harmonic excitations [20]. Andersen et al. examined the dynamics of a system of coupled oscillators possessing strongly non-linear stiffness and damping, where the non-linear terms of the system are realized due to geometric effects. They examined the transient instability caused by a bifurcation to 1:3 resonance capture and they showed that such instabilities result in strong energy transfer, which is suitable for vibration suppression and energy absorption [21]. Elshurafa et al. examined the spring softening and hardening phenomena that occur in particular electrostatically actuated micro-electromechanical systems. They also carried out a stability analysis based on phase plane trajectory and provided a way to predict the actual behavior of such resonators [22]. Papaspiridis and Antoniadis examined shock/vibration absorbers and presented a general framework for the usage of (DEs) as elements of active vibration control systems [23], while Antoniadis et al. showed that the application of a loose-part concept to two-member Dielectric Elastomer energy generating synergetic structures ensures the appearance of a non-linear broad-band system response, enhancing energy transfer from the environmental source [24].
The main characteristic of the aforementioned literature review is that, for widening the bandwidth over which a vibration-based energy absorber performs well, a non-linear attachment of constant material stiffness is introduced to the absorber. On the other hand, it is possible to build an energy absorber using members of variable stiffness. Toward this direction, the present paper examines a novel design, the basic pattern of which is an in-plane elastic structure comprising one proof mass with four non-linear hyper-elastic elastomer members attached to it, placed in a chi-shaped configuration, and being properly stretched. The proposed design is combined with a novel operating concept, termed here as partially-loose-member concept, which allows for the elastomer members to become loose, but not all of them simultaneously, at some time during the operating cycle. For the evaluation of the proposed design and operating concept, an extensive parametric investigation was carried out. The obtained results show that, due to the proposed partially-loose-member concept, the broad-band system response is non-linear, while the application of the traditional always-in-tension concept leads to a linear dynamic system response, even though the elastomer members are considered to have been made of a non-linear hyper-elastic material.
2 Analysis of the chi-shaped in-plane configuration
2.1 Basic design concept
The basic design concept of the proposed chi-shaped in-plane configuration is illustrated in Fig. 1. It is composed of a proof mass and four elastomer members, termed as M 1, M 2, M 3, and M 4, respectively (Fig. 1a). Each elastomer member (i-member) has an initial length l 0,i , an initial cross-section A 0,i , and an initial width d 0,i perpendicular to the plane of the paper. In the most general case, the initial position of each elastomer member is defined by two geometrical characteristics, namely the pre-stretch ratio λ p,i and the orientation angle α i . The pre-stretch ratio λ p,i is defined as the ratio of the pre-stretched length l p,i of each elastomer member over its initial length l 0,i . Without loss of generality, it is assumed that all elastomer members are of the same material and have the same initial geometry (Fig. 1a), i.e. initial length l 0, initial cross-section A 0, initial width d 0, initial absolute value of the orientation angle α and initial pre-stress λ p . In this way, the M 1 and M 3 members are collinear and so are the M 2 and M 4 members, thus a doubly symmetric chi-shape (Fig. 1b) is formed.

Chi-shaped in-plane configuration of the proposed dynamic elastomer structure: (a) initial state, (b) basic conceptual design of the energy absorber, (c) direct mass excitation and (d) kinematic (base) excitation u(t)=v(t)−y(t)
Such a configuration can be used as the basic building block of a non-linear dynamic absorber. There are two possibilities to provide external energy to the system [27]. The first one is a direct (dynamic) excitation (Fig. 1c) through the action of an external force F ext(t). The second one is a base (kinematic) excitation though an external base displacement y(t) (Fig. 1d). The energy absorption is considered to take place at the damping mechanisms of the system, schematically represented by an equivalent damper of a constant c (Figs. 1c, d). In the case of passive vibration suppression, the energy is entirely dissipated in the damper. In energy harvesting applications, the damper can be considered to model also the equivalent electrical mechanisms of the system, responsible for the mechanical to electrical energy conversion [25, 27].
Furthermore, a slider may be properly attached to the proof mass in order to ensure that the proof mass will move only along the horizontal axis (Figs. 1c, d). Due to symmetry with respect to the horizontal axis, the M 1 and M 4 members are equally stretched during the operating cycle; let their time-dependent length be denoted as l H (t) (Figs. 1c, d). Similarly, let the time-dependent length of the M 2 and M 3 members be denoted as l L (t) (Figs. 1c, d). Based on the aforementioned assumptions, the proof mass, as shown in Fig. 1, always oscillates on the plane of the paper, thus the configuration is characterized as ‘in-plane’.
2.2 Equation of motion
In the direct excitation case (Fig. 1c), the system may be considered as a single degree of freedom mass-spring-damper system, excited by an external sinusoidal force excitation F ext(t)=F 0cos(Ωt), where F 0 is the amplitude and Ω is the frequency of the excitation force. If u is the horizontal displacement of the proof mass during the operating cycle, then the corresponding normalized response η is defined as the ratio of the displacement u over the initial length l 0. For this system, the normalized equation of motion is
where F elas is the elastic force developed by the elastomer members, k 0 is an equivalent stiffness of a linearized system, ω 0 is the corresponding natural frequency and ζ is the corresponding damping ratio.
Equation (1) is also valid for the base excitation case of y(t)=Y 0cos(Ωt) with u(t)=v(t)−y(t) and F 0=Ω 2 mY 0.
2.3 Elastic force
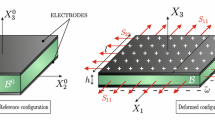
Assuming a pure shear mode of operation for the elastomer members and considering an incompressible neo-Hookean hyperelastic material of volume V 0 and shear modulus G, the strain energy function for each elastomer j-member may be written as
where λ j denotes the stretch ratio of the elastomer j-member under consideration (in the present case, j=1,2,3,4 for the M 1, M 2, M 3, and M 4 members, as per Fig. 1a). The total strain energy U T of the configuration, taking into consideration the horizontal symmetry mentioned in Sect. 2.1, becomes equal to
where \(U_{M_{1}}\) and \(U_{M _{2}}\) are the strain energies for the elastomer members with stretch ratio λ H and λ L , respectively. From the geometry of the configuration, the stretch ratios λ H and λ L corresponding to the time-dependent lengths l H and l L (Figs. 1c, d) are defined as
By definition, the elastic force F elas is equal to
The combination of (2), (3), (4), (5), (6) yields
In (7), the terms F λH and F λL describe the elastic force components due to the (M 1, M 4) and the (M 2, M 3) pairs of elastomer members, respectively. By definition, F λH is nonzero if and only if the corresponding pair (M 1, M 4) is under tension. A similar condition holds for F λL . Therefore, it is essential to estimate the domains of η, for which the aforementioned elastic force components are non-zero. Equivalently, the domains of η are sought such that
To this end, combining (4), (5), (8) yields:
As easily seen, (9), (10) describe two convex quadratic inequalities. However, for both cases, the discriminant is equal to
Consequently, (9), (10) are true for any η λH , η λH ∈[−∞,+∞] if and only if
For the condition
Equation (9) is true for any η λH ∈[η λH,lower,η λH,upper], where the lower bound η λH,lower and the upper bound η λH,upper are estimated by solving (9) as an equality. Similarly, (10) is true for any η λL ∈[η λL,lower,η λL,upper], where the lower bound η λL,lower and the upper bound η λL,upper are estimated by solving (10) as an equality. The solution of these equations results to:
Concluding, if (8) holds, then the elastic force F elas is estimated from (7), while if (13) holds then the force components F λH and F λL must be estimated as follows:
2.4 Equivalent linear stiffness coefficient
By definition, the equivalent linear stiffness coefficient k 0 is equal to:
Combining (7), (20), one gets, after basic manipulations:
As (21) shows, the coefficient k 0 l 0, which is used in the normalized equation of motion (1), depends on the orientation angle α. Therefore, if designs of different orientation angles are to be compared, then a normalization independent from angle α must be carried out. For this reason and without loss of generality, the normalization of (1) was based on the following selection:
2.5 Harmonic Balance approach
The equation of motion (1), based on (7), (18), (19), (22), becomes a well-defined second-order non-linear ordinary differential equation. For its solution, the harmonic balance approach may be used. More particularly, rearranging terms in (1) and adding the quantity \(\omega_{0}^{2} \eta\) to both sides of the equation, yields, after basic manipulations:
where
and
According to the Harmonic Balance (HB) approach [26], it is possible to assume that the solution η to (23) is a vibration of constant amplitude H and phase ψ:
where the phase angle ϕ is equal to:
The necessary condition for the existence of a solution is
where
It is possible to prove that, for the case under examination, the right-hand side of (29) is zero. Consequently, (28) becomes
Equation (32) is a bilinear equation with respect to the frequency ratio w. For a positive discriminant
the following solutions exist:
Plotting (34), (35) for various values of w, the frequency response curves of the examined system are obtained, while for Δ=0, the so-called back-bone response curve is also formed. It is noted that for Δ<0 no real solutions exist. The amount of the dissipated energy due to damping is equal to
where ζ is the damping ratio and P H is the mean absorbed power due to damping over an operating cycle. Equation (36) also provides an estimation of the theoretical maximum mean power that can be absorbed over an operating cycle. At this point, it is clarified that the aforementioned procedure is independent of the behavior of the absorber, thus is applicable to both hardening and softening mechanisms with either linear or non-linear elastic oscillating members.
2.6 Operating zones
As described in Sect. 2.1, the proof mass oscillates along the horizontal axis of symmetry of the energy absorber. The bounds of this oscillation define the operating zone of the absorber. Depending on whether (12) or (13) holds and with respect to the width of the operating zone, there are, in total seven cases emerging from (12)–(17), as illustrated in Fig. 2. Assuming that (12) holds and only the M 2 and M 3 elastomer members are present, the allowable to-the-right displacement of the proof mass is illustrated as a blue right-hatched rectangle and the right-most allowable position of the proof mass is denoted as ‘H Upper’. The allowable to-the-left displacement of the proof mass is illustrated as a green left-hatched rectangle and the left-most allowable position of the proof mass is denoted as ‘H Lower’. Assuming that (12) holds and only the M 1 and M 4 elastomer members are present, the bounds ‘L Upper’ and ‘L Lower’, are obtained, respectively. The simultaneous operation of both (M 1, M 4) and (M 2, M 3) pairs defines an operating zone between the bounds ‘H Lower’ and ‘L Upper’ (Case I) as illustrated in Fig. 2a, where the elastomer members are shown as thick, continuous, black lines in the position of equilibrium, as thick, blue, dashed lines for a right displacement and as thick, green, dashed lines for a left displacement of the proof mass. However, if (13) holds then for the (M 1, M 4) pair of elastomer members there exists a zone (Dead Band Zone, here denoted as DBZ-H and illustrated as a red hatched rectangle) within which this elastomer pair is loose. Similarly, if (13) holds then there is a Dead Band Zone for the (M 2, M 3) pair, as well (denoted here as DBZ-L and also illustrated as a red hatched rectangle). Depending on the pre-stretch ratio λ p and the orientation angle α, the aforementioned dead band zones may be either separate (Case II) or overlapping (Case III), as shown in Fig. 2b and e, respectively. Each one of Case II and Case III has three subcases, as also shown in Figs. 2c, d and f, g.

Qualitative illustration of the operating zones of a chi-shaped energy absorber: (a) Case I, (b, c, d) Case II, and (e, f, g) Case III
In Fig. 2, the operating zones are denoted as L oper,1, L oper,2α , L oper,2b , L oper,2c , L oper,3α , L oper,3b , and L oper,3c , respectively, for the three characteristic cases (Case I, Case II, and Case III) and their subcases. In the current paper, all the aforementioned cases and subcases are analyzed. It is noted that Case IIa (Fig. 2b) practically coincides with Case I (Fig. 2a), while Case IIIa (Fig. 2e) is of no practical importance since all the elastomer members are always loose.
2.7 Dead band zones
The normalized width η DBZ of the dead band zones, as seen from (14)–(17), is equal to
As (37) suggests, DBZs exist if and only if
Otherwise, the elastomer members remain stretched during the operating cycle (Sect. 2.2.5, Case I). The plot of (37), with respect to the orientation angle α and for various values of the pre-stretch ratio λ p , is shown in Fig. 3. This plot also illustrates the limiting values of the orientation angle for which it is possible to get loose elastomer members.

Normalized dead band zone widths for various orientation angles and pre-stretch ratios
In more detail, the curve λ p =1 divides the plane in two regions. For values of λ p <1, as for e.g. λ p =0.5 depicted in Fig. 3, (38) holds for all values of α, and thus the width of the corresponding DBZ is always non-zero. More particularly, if α=0∘ then η DBZ=2, while if α=90∘ then η DBZ=1.732. However, for values of λ p >1, the dead band zones can vanish. As, e.g. the curve for λ p =3.0 shows, the normalized width of the dead band zone vanishes for α>20∘, approximately.
3 Results
In order to evaluate if and to which extent the design under consideration offers perspectives and advantages for energy harvesting, two basic features of its dynamic behavior must be examined: (A) the existence of a predictable and periodic response and (B) the existence of a broadband power response function.
3.1 Initially pre-stressed structures (IPDSS and IPDLS)
First, initially pre-stressed structures are examined with a pre-stretch ratio λ p =1.75. Two groups of configurations are considered. The first group, which corresponds to the Case I of Fig. 2, concerns configurations with such an initial pre-stretch that the elastomer members never become loose during the operating cycle. This group is termed here as ‘In-Plane Diagonal Stretched Structures—IPDSS’. For this group, a maximum normalized response η max=0.75 was selected. The second group, which corresponds to Case II of Fig. 2, concerns configurations with such an initial pre-stretch that the elastomer members present separate dead band zones. This group is termed here as ‘In-Plane Diagonal Loose Structures—IPDLS’. For this group, the maximum normalized response was defined as η max=2.0 (IPDLS-1 case) and η max=3.0 IPDLS-2 case), respectively.
3.1.1 Analysis of the elastic force curves
A series of plots of F elas with respect to the normalized system response η for various orientation angles α and for λ p =1.75, are shown in Fig. 4 as a black continuous line (only positive displacements η are shown). This force is estimated using (7), (18), (19). In the same figure, the elastic force component due to the action of the (M 1, M 4) pair of elastomer members F H is also shown as a red dashed line. Similarly, F L is the force component due to the action of the (M 2, M 3) pair of elastomer members and is also shown in Fig. 4 as a blue dashed line. The appearing zero-value plateaus denote that the proof mass moves within a dead band zone thus the corresponding elastomer member produces no restoration elastic force. The curved part of the plots denotes that the absorber behaves as a non-linear system, while the straight parts of the plots denote a linear behavior of the absorber. Visual inspection reveals that the application of the proposed partially-loose-member concept allows for the system to operate beyond the limiting η-values posed by the always-in-stress concept. In addition and most important, for an orientation angle of approximately α>60∘, the system presents a linear behavior, even though the elastomer members are assumed to have been made of a hyperelastic material. This means that the geometry of the configuration cancels out the material non-linearity. Furthermore, as the length of the zero-value plateaus reveals, increasing the orientation angle makes the width of the dead band zones decrease and finally disappear.

Elastic force curves for λ p =1.75 and orientation angle from 0∘ to (step: of 20∘)
3.1.2 The periodicity of the dynamic response
The Frequency Response Curves (FRCs) for the (IPDSS), the (IPDLS-1), and the (IPDLS-2) designs and for various orientation angles α are presented in Fig. 5, where the continuous black lines, the continuous red lines and the continues blue lines illustrate the (FRCs) for the (IPDSS), the (IPDLS-1), and the (IPDLS-2), respectively. The results are obtained by applying the Harmonic Balance (HB) approach, as described in Sect. 2.5

Frequency response curves for λ p =1.75 and orientation angle from 0∘ to 60∘ (step: 20∘) (continuous lines: (HB) results, circular markers: (R–K) solutions)
Then the exact solution of these equations is obtained by numerical integration using the Runge–Kutta (R–K) approach. The results are again presented in Fig. 5 verifying that the solutions presented in Fig. 5 correspond to harmonic responses.
With respect to the (IPDSS) for small orientation angles, it clearly presents a hardening behavior, with the maximum normalized response amplitude n max appearing at a frequency ratio (Ω/ω)=1.25. As the orientation angle increases, the hardening behavior diminishes and finally disappears for an orientation angle of 30∘, approximately, while the maximum normalized response amplitude n max continues to appear at (Ω/ω)=1.25. For angles greater than 30∘, the corresponding (FRCs) describe a typical linear behavior with the maximum normalized response amplitude n max being shifted from (Ω/ω)=1.25 toward the left (left-shifting of the entire FRC). For an orientation angle approximately equal to 60∘, the corresponding n max appears at (Ω/ω)=1.00 (FRC of a typical linear absorber), while for an orientation angle equal to 90∘, the corresponding n max appears at (Ω/ω)=0.95, approximately. The physical interpretation of this behavior is straight forward. In more details, the (M 1, M 4) and (M 2, M 3) pairs of elastomer members (Fig. 2) never become loose due to their adequate initial pre-stretch. This fact, in combination with a small orientation angle, results in a purely antagonistic action of the aforementioned pairs, which in turn is realized as a hardening behavior. However, for larger orientation angles and exactly due to the geometry of the configuration, the operation of the aforementioned pairs becomes synagonistic, which in turn is realized as a linear behavior.
With respect to the IPDLS-1, for small orientation angles and for n max<0.75, the corresponding (FRCs) present a clear hardening behavior, which switches to a softening behavior for n max>0.75. As the orientation angle increases, the aforementioned non-linear behavior diminishes, and finally disappears for an orientation angle around 60∘. For larger orientation angles, the corresponding (FRCs) are almost identical and illustrate the behavior of a dynamic linear absorber with the maximum response amplitude n max appearing at a frequency ratio (Ω/ω)=0.98. The physical interpretation of this more complex behavior is also straight forward. For small orientation angles and for n max<0.75, the antagonistic action of the (M 1, M 4) and (M 2, M 3) pairs of elastomer members, which never become loose, prevails. However, for n max>0.75, the aforementioned pairs alternatively fall in their dead band zones, thus while one pair becomes more stretched the other pair has no contribution to the stiffness of the oscillating system, which isrealized as a softening behavior. At this point, it is strongly emphasized that the limiting positions of the system fall in the dead band zones (Fig. 2b) of the system. Furthermore, as the orientation angle increases, the aforementioned pairs behave synagonistically. At the same time, their dead band zones, due to the initial pre-stretch of the elastomer members, diminish and finally disappear, thus making the system behave as linear absorber.
With respect to the (IPDLS-2), for small orientation angles and for n max<0.75, the corresponding (FRCs) also present a hardening behavior and are similar to the (FRCs) of the (IPDLS-1), the major difference being that, clearly, the (FRC-IPDLS-2) encloses the (FRC-IPDLS-1). For n max>0.75 and up to n max<2.0, the aforementioned hardening behavior switches to a softening behavior. For n max>2.0, the system again switches back to a hardening behavior. As the orientation angle increases, the aforementioned non-linear complex behavior diminishes and finally disappears for an orientation angle around 60∘. As with (IPDLS-1), for larger orientation angles, the corresponding (FRCs) of the (IPDLS-2) are almost identical and illustrate the behavior of a dynamic linear absorber with the maximum response amplitude n max appearing at a frequency ratio (Ω/ω)=0.98. The physical interpretation of the (IPDLS-2) is also straight forward. Initially, for small orientation angles and for n max<0.75, the (M 1, M 4) and (M 2, M 3) pairs of elastomer members never become loose and behave antagonistically. For 0.75<n max<2.0, the aforementioned pairs alternatively fall in their dead band zones, thus while one pair becomes more stretched the other pair has no contribution to the stiffness of the oscillating system, which is realized as a softening behavior. However, exactly due to the high value of the allowable maximum normalized response amplitude, the limiting positions of the system are beyond the dead band zones (Fig. 2e) of the system, thus the elastomer pairs pass through their dead band zone, continue to extend and become antagonistic again beyond their dead band zones. As a result, a new hardening behavior appears. As the orientation angle increases, the (IPDLS-2) behaves similarly to the (IPDLS-1), meaning that the aforementioned pairs become synagonistic, while simultaneously, their dead band zones, due to the initial pre-stretch of the elastomer members, diminish and finally disappear. In this way, the system degenerates to a linear absorber.
In comparison with the (FRC-IPDSS), it is clear that the (FRCs-IPDLS-1) enclose the (FRCs-IPDSS), while (FRC-IPDLS-2) enclose the (FRC-IPDLS-1). Indicatively, from Fig. 5a, the domain of (Ω/ω) for η max=0.75 is {1.25}, [1.00,1.28], and [0.92,1.38], respectively, for the (IPDSS), the (IPDLS-1), and the (IPDLS-2). Similarly, from Fig. 5g, the corresponding domains of (Ω/ω) for η max=0.75 are {0.98}, [0.85,1.10], and [0.75,1.18], respectively. Therefore, it is clear that while the maximum normalized response amplitude of the (IPDSS) occurs for a single (Ω/ω) value, the same response amplitude may appear for an (IPDLS) but for a domain of (Ω/ω) values, which becomes wider as the maximum normalized response amplitude of the (IPDLS) increases. Since the (IPDSS) realizes the always-in-tension concept and the (IPDLSs) realize the proposed chi-shaped design in combination with the proposed partially-loose-member concept, it becomes evident that the proposed combination of design and concept is superior for all values of the orientation angle α and for all values of the pre-stretch ratio λ p .
An interesting observation in Figs. 5 is the fact that, depending on the pre-stretch ratio and the orientation angle, some FRCs presented resemble in a certain sense the corresponding FRCs of a softening Duffing type nonlinear oscillator [28]. An enlarged view of such an FRC is more clearly depicted in Fig. 6, where it can be observed that for a single value of the ratio (Ω/ω) three possible values for the amplitude η exist in a certain range of the FRC. Results of some further analysis are presented in Fig. 7, where the green (blue) color corresponds to that set of initial conditions that converge to the upper (lower) branch of the frequency response curve. No set of initial conditions exists in Fig. 7, which leads to the intermediate point of the curve.

Magnified view of a typical frequency response curve for λ p =1.75

Basins of attraction for λ p =1.75: (a) α=0∘, η max=3, (Ω/ω)=0.90, (b) α=90∘, η max=3, (Ω/ω)=0.95, (c) α=0∘, η max=2, (Ω/ω)=0.90 and (d) α=90∘, η max=2, (Ω/ω)=0.95
3.1.3 Broadband energy features
The power response curves, computed according to (36), are shown in Fig. 8 where, again, the continuous black lines, the continuous red lines, and the continuous blue lines illustrate the (FRCs) for the (IPDSS), the (IPDLS-1), and the (IPDLS-2), respectively, while the dashed lines indicate the bounds of unstable regions. As is clearly understood by visual inspection, for any frequency ratio (Ω/ω), the (IPDLSs) outperform the (IPDSS) in terms of normalized power. However, of major importance is the fact that, for any normalized power greater than a given threshold, the (IPDLS) bandwidth corresponding to the aforementioned threshold is significantly wider than that of the (IPDSS). Therefore, Fig. 8 also verifies the superiority of the proposed partially-loose-member concept, in combination with in-plane chi-shaped energy absorbing configurations, over the widely-applied always-in-tension concept.

Power response curves for λ p =1.75 and orientation angle from 0∘ to 60∘ (step: 20∘)
A further comparison between the possible IPDLS designs reveals which IPDLS design is less favorable. Toward this direction, the following procedure was applied:
-
Based on the obtained Power Response Curves (PRC), arbitrarily select values for the Normalized Power, let them termed as threshold values. In the present paper, the values 0.075, 0.050, 0.025, and 0.010 were selected. A threshold value divides a PRC into an upper part (values on the power response curve that are higher than the threshold value) and a lower part.
-
For each PRC and for each selected threshold value, determine the area under the PRC that corresponds to its upper part, as that was defined previously.
-
Select one PRC as a reference.
-
Compare all PRCs to the reference PRC.
The results from the application of the preceding procedure are illustrated in Figs. 9, 10. More specifically, Fig. 9 refers to IPDLS designs with λ p =1.75. The PRCs have been altered so that the unstable regions have been removed and the harvested power is maximized. As a reference, the PRC corresponding to an angle of 60∘ has been selected because it presents a linear behavior. The presented bar charts reveal that the amount of the harvested power is least for α=60∘. Furthermore, the line charts (Figs. 9a, c) show that all PRCs have the same peak value. If the area under two curves with the same peak value and the same height (i.e. difference between a threshold and the peak value) is different, then their ‘base’ is different and the ‘base’ is wider for the curve surrounding the larger area. This qualitative description is of major importance in the case under examination because the physical interpretation of the ‘base’ of the PRCs is the broadband that can be used for harvesting power. Therefore, the least favorable case goes along both with the smaller amount of harvested power and the shortest broadband. The corollary is that IPDLS designs with non-linear behavior go along with higher amounts of harvested power and wider broadbands than the designs with linear behavior.

(a) Power response curves for (λ p =1.75, η max=2), (b) comparison between IPDLS for (λ p =1.75, η max=2), (c) power response curves for (λ p =1.75, η max=3), (d) comparison between IPDLS for (λ p =1.75, η max=3)

(a) Power response curves for (λ p =1.00, η max=1), (b) comparison between IPDLS for (λ p =1.00, η max=1), (c) power response curves for (λ p =1.00, η max=3), (d) comparison between IPDLS for (λ p =1.00, η max=3)
The same conclusion is confirmed from Fig. 10, which refers to IPDLS designs with λ p =1.00. This time, as a reference, the PRC for α=55∘ has been selected because it is the closest to a linear behavior.
Based on the preceding comparisons, it follows that IPDLS designs must be such that their response is far from being linear. Equivalently, non-linear energy absorbers based on properly stretched in-plane elastomer structures are far more favorable than linear ones both in terms of harvested power and broadband.
3.2 Initially loose structures (IPDILS)
Next, configurations of initially loose elastomer structures are considered, termed as ‘In-Plane Diagonal Initially Loose Structures—IPDILS’. They correspond to Case III of Fig. 2. In this case, a pre-stretch ratio less than one (λ p =0.5<1) and a maximum normalized response amplitude of η max=1.5 and η max=3.0 was selected.
The selection of all the aforementioned λ p and η max values is such that some basic interesting aspects with respect to the response of the examined configurations are revealed. For each (λ p ,η max) pair of values, four different configurations were examined with the orientation angle α varying from 0∘ to 90∘ with a step of 30∘. Based on the obtained results, the corresponding Frequency Response Curves (FRCs) were created.
The elastic force F elas with respect to the normalized system response η, for various orientation angles and for λ p =0.50 is shown in Fig. 11 as a black continuous line. Again, only positive displacements η are shown, while F H and F L are shown as a red and as a blue dashed line, respectively. Similar remarks with the ones mentioned for Fig. 4 apply. In addition, Fig. 11 provides useful information about the presence and the overlapping of the dead band zones. For the completeness of the text, only Fig. 11a will be analytically discussed. More particularly, F elas is zero for η<0.5, which means that both F H and F L are zero, or, equivalently, that the proof mass lies in the overlapping portion of the two DBZs. For 0.5<η<1.5, only F L is zero, which means that the proof mass has exited the DBZ-H but is still inside the DBZ-L. For η>1.5, both F H and F L are non-zero, thus the proof mass is outside of both DBZs. Lastly, as the lengths of the zero-value plateaus reveal, increasing the orientation angle α makes the widths of the dead band zones become equal.

Elastic force curves for λ p =0.50 and orientation angles from 0∘ to 90∘ (step: 30∘)
The Frequency Response Curves (FRCs), for the (IPDILS) designs and for various orientation angles α, are illustrated in Fig. 12. The continuous red lines represent the (FRCs) for an (IPDILS) with pre-stretch ratio λ p =0.50, damping ratio ζ=0.05 and maximum normalized response amplitude n max=1.5. The continuous blue lines represent the (FRCs) of a similar (IPDILS) with n max=3.0.

Frequency response curves for λ p =0.50 and orientation angle from 0∘ to 90∘ (step: 30∘)
The fact that the elastic force F elas is zero for η<0.5 generates now a dead band zone for the entire structure. Therefore, a far more complex dynamic response is anticipated that in the case of the Initially Pre-stressed Structures (IPDSS and IPDLS) in Sect. 3.1.
An indication of the expected complexity of the dynamic response of the initially loose structures is the fact that in certain cases, as depicted in Fig. 13, up to five possible values for the amplitude η may exist for a single value of the ratio (Ω/ω). The time responses in Fig. 14 confirm this fact, where for small variations in the excitation frequency, large variations in the amplitude result.

Magnified view of a typical frequency response curve for λ p =0.50

Time Response Curves for λ p =0.50, η max=3, α=10∘: (a) (Ω/ω)=0.885, (b) (Ω/ω)=0.890 (Zero initial conditions and force amplitude F 0=2.947)
Taking into account that for reasons due to constraints in their mechanical/electrical design, typical energy harvesting applications require a periodic almost harmonic response. Further research is necessary on the proper application of the initially loose structures to energy harvesting.
3.3 Parametric investigation with respect to the pre-stress ratio λ p
For the needs of the present paper, an extensive parametric investigation with respect to the pre-stretch ratio λ p took place, in order to reveal its effect on the system behavior. Indicative plots of the frequency response curves are shown in Fig. 15. For example, Fig. 15a suggests that, as the pre-stretch ratio increases, the base of the FRC lobe shifts characteristically to the right (a hardening behavior changes to a softening one) while the value (Ω/ω) corresponding to the peak of the plotted curves changes insignificantly. Furthermore, the higher the pre-stretch ratio is the higher the value η max for which the second hardening state initiates.

Frequency response curves for ζ=0.05 and orientation angles (a) 0∘, (b) 45∘ and (c) 20∘
Similar remarks can also be drawn from Fig. 16, which illustrates indicative power response curves.

Power response curves for ζ=0.05 and orientation angles (a) 0∘, (b) 45∘, and (c) 20∘
3.4 Parametric investigation with respect to the damping ratio ζ
An extensive parametric investigation with respect to the damping ratio ζ also took place. Indicative plots for λ p =1.75 are shown in Fig. 17 (frequency response curves) and Fig. 18 (power response curves).

Frequency response curves for λ p =1.75 and orientation angles (a) 0∘, (b) 45∘, and (c) 20∘

Power response curves for λ p =1.75 and orientation angles (a) 0∘, (b) 45∘, and (c) 20∘
As anticipated, increasing the damping of the system makes the system behave as a typical linear absorber, thus the regions with multi-valued FRCs diminish. This observation is also illustrated in Fig. 18.
4 Conclusion
The traditional approach of designing a chi-shaped elastomer structure in such a way that all of its members are “always-in-tension” may result to a linear dynamic system response, even though the individual elastomer members are considered to have been made of a non-linear (hyper-elastic) material. On the other hand, the proposed chi-shaped elastomer structures, in which certain members are allowed to become loose in a controlled way during certain phases of their operation (partially-loose-member concept) indicates the existence of a harmonic dynamic response with a broad-band potential, which can result in energy absorbers with enhanced energy absorption capabilities. Such a behavior is possible when all members of the structure are initially pre-stressed at an appropriate level and form an appropriate orientation angle between them. In case that all the members of the chi-shaped structure are allowed to be initially loose, a far more complex non-linear dynamic behavior is expected, requiring further research on the proper application of the proposed configuration for energy harvesting.
References
Pelrine, R., Kornbluh, R., Pei, Q., Joseph, J.: High-speed electrically actuated elastomers with strain greater than 100 %. Science 287, 836–839 (2000)
Pelrine, R., Kornbluh, R., Eckerle, J., Jeuck, P., Oh, S., Pei, Q., Stanford, S.: Dielectric elastomers: generator mode fundamentals and applications. Proc. SPIE 4329, 148–156 (2001)
Jean-Mistral, C., Basrour, S., Chaillout, J.J.: Modelling of dielectric polymers for energy scavenging applications. Smart Mater. Struct. (2010). doi:10.1088/0964-1726/19/10/105006
Koh, S.J.A., Keplinger, C., Li, T., Bauer, S., Suo, Z.: Dielectric elastomer generators: how much energy can be converted? IEEE/ASME Trans. Mechatron. 16(1), 33–41 (2011)
Baumgartner, R., Keplinger, C., Kaltseis, R., Schwödiauer, R., Bauer, S.: Dielectric elastomers: from the beginning of modern science to applications in actuators and energy harvesters. Proc. SPIE (2011). doi:10.1117/12.880289
Falcão, A.F. de O.: Wave energy utilization: a review of the technologies. Renew. Sustain. Energy Rev. 14, 899–918 (2010)
Tang, L., Yang, Y., Soh, C.K.: Toward broadband vibration-based energy harvesting. J. Intell. Mater. Syst. Struct. 21, 1867–1897 (2010)
Anton, S.R., Sodano, H.A.: A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater. Struct. (2007). doi:10.1088/0964-1726/16/3/R01
Lallart, M., Wu, Y.C., Richard, C., Guyomar, D., Halvorsen, E.: Broadband modeling of a nonlinear technique for energy harvesting. Smart Mater. Struct. (2012). doi:10.1088/0964-1726/21/11/115006
Dalzell, P., Bonello, P.: Analysis of an energy harvesting piezoelectric beam with energy storage circuit. Smart Mater. Struct. (2012). doi:10.1088/0964-1726/21/10/105029
Seuaciuc-Osorio, T., Daqaq, M.F.: Energy harvesting under excitations of time-varying frequency. J. Sound Vib. 329, 2497–2515 (2010)
Sebald, G., Kuwano, H., Guyomar, D., Ducharne, B.: Simulation of a Duffing oscillator for broadband piezoelectric energy harvesting. Smart Mater. Struct. (2011). doi:10.1088/0964-1726/20/7/075022
Wang, H.Y., Shan, X.B., Xie, T.: An energy harvester combining a piezoelectric cantilever and a single degree of freedom elastic system. Univ.-Sci. A, Appl. Phys. Eng. 13(7), 526–537 (2012)
Daqaq, M.F.: On intentional introduction of stiffness nonlinearities for energy harvesting under white Gaussian excitations. Nonlinear Dyn. 69, 1063–1079 (2012)
Abdelkefi, A., Nayfeh, A.H., Hajj, M.R.: Enhancement of power harvesting from piezoaeroelastic systems. Nonlinear Dyn. 68, 531–541 (2012)
Mann, B.P., Owens, B.A.: Investigations of a nonlinear energy harvester with a bistable potential well. J. Sound Vib. 329, 1215–1226 (2010)
Ramlan, R., Brennan, M.J., Mace, B.R., Kovacic, I.: Potential benefits of a non-linear stiffness in an energy harvesting device. Nonlinear Dyn. 59, 545–558 (2010)
Quinn, D.D., Triplett, A.L., Bergman, L.A., Vakakis, A.F.: Comparing linear and essentially nonlinear vibration-based energy harvesting. J. Vib. Acoust. (2011). doi:10.1115/1.4002782
Trigona, C., Dumas, N., Latorre, L., Andò, B., Baglio, S., Nouet, P.: Exploiting benefits of a periodically-forced nonlinear oscillator for energy harvesting from ambient vibrations. Proc. Eng. 25, 819–822 (2012)
Orazov, B., O’Reilly, O.M., Zhou, X.: On forced oscillations of a simple model for a novel wave energy converter. Nonlinear Dyn. 67, 1135–1146 (2012)
Andersen, D., Starosvetsky, Y., Vakakis, A., Bergman, L.: Dynamic instabilities in coupled oscillators induced by geometrically nonlinear damping. Nonlinear Dyn. 67, 807–827 (2012)
Elshurafa, A.M., Khirallah, K., Tawfik, H.H., Emira, A., Abdel Aziz, A.K.S., Sedky, S.M.: Nonlinear dynamics of spring softening and hardening in folded-MEMS comb drive resonators. J. Microelectromech. Syst. 20(4), 943–958 (2011)
Papaspiridis, F.G., Antoniadis, I.A.: Dielectric elastomer actuators as elements of active vibration control systems. Adv. Sci. Technol. 61, 103–111 (2008)
Antoniadis, I.A., Venetsanos, D.T., Papaspyridis, F.G.: DIESYS—dynamically non-linear dielectric elastomer energy generating synergetic structures: perspectives and challenges. Smart Mater. Struct. (2013). doi:10.1088/0964-1726/22/10/104007
Graf, C., Maas, J.: Electroactive polymer devices for active vibration damping. Proc. SPIE (2011). doi:10.1117/12.879934
Stoker, J.J.: Nonlinear Vibrations in Mechanical and Electrical Systems. Wiley, New York (1950)
Stephen, N.G.: On energy harvesting from ambient vibration. J. Sound Vib. 293, 409–425 (2006)
Kalmár-Nagy, T., Balachandran, B.: Forced harmonic vibration of a Duffing oscillator with linear viscous damping. In: Kovacic, I., Brennan, M.J. (eds.) The Duffing Equation: Nonlinear Oscillators and Their Behaviour, pp. 139–173. Wiley, New York (2011)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Antoniadis, I.A., Venetsanos, D.T. & Papaspyridis, F.G. Dynamic non-linear energy absorbers based on properly stretched in-plane elastomer structures. Nonlinear Dyn 75, 367–386 (2014). https://doi.org/10.1007/s11071-013-1072-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1072-8