
Abstract
The finite-time synchronization problem of a class of complex dynamical networks with time-varying delays is addressed in this paper. The network topology is assumed to be directed and weakly connected. By introducing a special zero row-sum matrix and combining the Lyapunov–Krasovskii functional method and the Kronecker product technique, a sufficient condition is presented, which consist of two simple low-dimensional matrix inequalities. Illustrative example is given to show the feasibility of the proposed method.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, complex dynamical networks which consist of a number of interacting dynamical nodes connected by links have received a great deal of attention from various fields such as mathematics, physics, engineering, and economic science [1, 2]. Complex dynamical networks exist in everywhere in our daily lives including neural networks, powergrids, ecosystems, Internet, and so on.
Among many dynamical behaviors of complex networks, synchronization is one of the most important ones that has been an ever hot research topic. Works on this issue have concentrated on the networks with undirected and strongly connected topology [3–14]. In [3], a uniform dynamical network model was proposed and the system decomposition technique was presented. Based on this seminal work and the introduction of the delayed coupling, synchronization properties were investigated in [4]. By the Lyapunov functional method and linear matrix inequalities (LMIs), global synchronization criterion of coupled delayed neural networks with hybrid coupling scheme was proposed in [5–9]. When the complex networks with adaptive coupling weights and neutral delay weights are considered, the synchronization results can be founded in [10] and [12], respectively. In the literature mentioned above, the coupling configuration matrix is assumed to be symmetric and irreducible, which is quite restrictive in practice. When the coupling matrix is allowed to be asymmetric, the synchronization results can be founded in [15–20]. On the basis of geometrical analysis of the synchronization manifold, a new approach for synchronization of coupled oscillators was provided in [16]. In [18], the synchronization condition for complex networks with switching topology was obtained by using the assumption of simultaneous triangularization of the coupling matrix. However, the quantity or dimension of the inequality in derived conditions in these works are depended on nodes’ quantity N even N×N, so that these conditions are not suitable for large-scale complex networks. In [21–23], one measure distilled from the coupling matrix was given to characterize the synchronizability of directed large-scale networks.
Up to now, most of the existing results related to stability or synchronization focus on Lyapunov asymptotic stability or synchronization, which are defined over an infinite time interval. Nevertheless, in the practical engineering process, one is interested in a bound of system trajectories over a fixed finite time [24]. Hence, the concept of short time stability, such as finite-time stability is introduced. There exist two concepts of finite-time stability. One of them means that for a given bound on the initial condition the state of system remains within a prescribed bound in a fixed time interval [25], which is also called as finite-time boundedness. Another one means that the state converges to 0 with finite time. Generally speaking, the latter means optimality in convergence time. There are many results on finite-time stability for linear system and nonlinear system [24–29]. However, to the best of our knowledge, there are few results concerning finite-time synchronization (or finite-time boundedness) for complex networks.
Motivated by the above discussion, we consider the problem of finite-time synchronization analysis of complex dynamical networks with time-varying delays in this paper. First of all, inspired by the concept of finite-time stability (or finite-time boundedness) for the general linear system given in [25], definition of finite-time synchronization for the complex networks is proposed. Then, by using the Lyapunov functional method and Kronecker product techniques, the sufficient condition is derived. By utilizing a special zero row-sum matrix U, only one quantitative measure on U is included in our condition, which is easy to obtain even for large-scale networks. The proposed criterion is expressed as two simple and low-dimensional LMIs which can be checked easily and conveniently by Matlab Toolbox. It is also worth noting that the coupling configuration matrix is not assumed to be symmetric or irreducible, so that the structure of the network can be directed, weighted, and weakly connected.
Notation Throughout this paper, for real symmetric matrices X and Y, the notation X≥Y (respectively, X>Y) means that the matrix X−Y is positive semi-definite (respectively, positive definite). λ max (X) (respectively, λ 2(X)) denote the largest (respectively, second largest) eigenvalue of matrix X. The notation X T represents the transpose of X. The symmetric terms in a symmetric matrix are denoted by ∗. The Kronecker product of matrices X and Y is denoted as X⊗Y. \(\mathcal{R}^{n}\) denotes the n-dimensional Euclidean space. I n is the n-dimensional identity matrix. Matrices, if not explicitly stated, are assumed to have compatible dimensions.
2 Problem formulation
We consider a complex dynamical network consisting of N delayed neural networks:

where \(x_{i}=[x_{i1},x_{i2},\ldots,x_{in}]^{T}\in\mathcal{R}^{n}\) is the state vector of the node i; f(x i (t))=[f 1(x i1(t)),…,f n (x in (t))]T. Diagonal matrix C>0 describes the rate with which the each neuron will reset its potential to the resting state when isolated from other cells and inputs. B 1, B 2 are the connection weight matrix, the delayed connection weight matrix, respectively. I(t) is an external input vector. τ(t) represents the transmission delay that satisfies \(0<\tau(t)\leq\bar{\tau}\), \(\dot{\tau}(t)\leq\mu<1\). Diagonal matrix Γ>0 describes the inner-coupling between the subsystems; c is the coupling strength. A=(a ij ) N×N is the coupling configuration matrix representing the topological structures of the networks, and a ij is defined as follows: if there is a connection from node j to i (j≠i), then a ij >0; otherwise, a ij =0. The diagonal entries of matrix A satisfy the following diffusive coupling condition:

Let

Then complex dynamical network (1) can be rewritten as

Remark 1
A is allowed to be asymmetric matrix representing the network topology which can be directed and weighted in this paper. In many existing literature, A is restricted to be symmetric [3–13], which is not practical in the real-world networks. In [21], A is assumed to be irreducible and reducible as two parts to discuss, respectively. However, in this paper, no assumption on irreducibility is needed; we just discussed the weakly connected structure. Namely, the reverse of the graph generated by matrix A must contain a rooted spanning directed tree [15].
Assumption 1
Real parts of eigenvalues of A are all negative except an eigenvalue 0 with multiplicity 1 (the reverse of the graph generated by matrix A contains a rooted spanning directed tree).
Assumption 2
The activation function is global Lipschitz continuous, and there exists K=diag(k 1,…,k n )>0 such that

for any \(\alpha,\beta\in\mathcal{R}\).
Throughout this paper, the following lemma and definition are needed to prove our main results.
Lemma 1
([11])
Let \(\mathcal{U}=(u_{ij})_{N\times N}\), P∈R n×n, \(x^{T}=[x_{1}^{T},x_{2}^{T},\ldots,x_{N}^{T}]\), \(y^{T}=[y_{1}^{T},y_{2}^{T},\ldots,y_{N}^{T}]\), x i ,y i ∈R n, i=1,2,…,N. If \(\mathcal{U}=\mathcal{U}^{T}\) and each row sum of \(\mathcal{U}\) is zero, then
Definition 1
The complex network (3) is said to be finite-time synchronization with respect to (c 1,c 2,T) with c 1<c 2, if for \(\sum_{1\leq i<j\leq N}\sup_{-\bar{\tau} \leq \theta\leq0}\Vert x_{i}(\theta)-x_{j}(\theta)\Vert^{2}\leq c_{1}\), one has

for i,j=1,2,…,N.
3 Main results
Now we are in a position to present our main results. Firstly, we introduce a matrix U with special structure as follows:

It can be concluded that U is a zero row-sum symmetric matrix with eigenvalue λ max =N.
Theorem 1
For given scalars \(\bar{\tau}>0\) and μ<1, under Assumptions 1 and 2, the complex network (3) is finite-time synchronization with respect to (c 1,c 2,T) with c 1<c 2, if there exist a matrix Q>0, diagonal matrices L>0, P>0 and a scalar α>0, such that


where

Proof
Define a Lyapunov–Krasovskii functional candidate for system (3) as

Calculating the time derivative of V(x) along the trajectories of (3) and noting that (U⊗P)I(t)=0, one has

From Assumption 2, we have

Then, by Lemma 1 and through some calculation, we obtain

From matrix analysis theory, we can conclude that UA+A T U is a zero row-sum symmetric matrix with negative diagonal elements. The eigenvalues of UA+A T U can be obtained as 0=λ 1(UA+A T U)>λ 2(UA+A T U)≥λ 3(UA+A T U)≥⋯≥λ N (UA+A T U). It follows that there exists a unitary matrix ϒ such that ϒ T(UA+A T U)ϒ=Λ, where Λ=diag{0,λ 2(UA+A T U),…,λ N (UA+A T U)}, and ϒ=[ϒ 1,ϒ 2,…,ϒ N ] with ϒ 1=[υ c ,υ c ,…,υ c ]T, \(\upsilon_{c}\in\mathcal{R}\) is a constant. Set x(t)=(ϒ⊗I n )y(t). Then one has

Now recall the structure of matrix U, one can obtain that Uϒ 1=O N×1, and

where \(\bar{\varUpsilon}=[\varUpsilon_{2},\varUpsilon_{3},\ldots,\varUpsilon_{N}]\). Let \(\bar{y}(t)=[y_{2}^{T}(t),\ldots,\allowbreak y_{N}^{T}(t)]^{T}\), it follows that

Then, it follows from (10)–(12) that

where

and

Notice that

According to (5)

We have

Multiplying (16) by e −αt, it obtains that

Integrating (17) from 0 to t, with t∈[0,T], it follows that

Since

Therefore,

Namely,

From (6), for all t∈[0,T], ∑1≤i<j≤N ∥x i (t)−x j (t)∥2<c 2. The proof is completed. □
Remark 2
Theorem 1 provide the finite-time synchronization condition for complex network (3). Following a similar line as in the proof of it, asymptotic synchronization and exponential synchronization conditions can also be presented, which will be considered in our future work.
Remark 3
From a viewpoint of computation, it should be noted that the conditions in Theorem 1 are not standard LMIs conditions. However, we can utilize the algorithm proposed in [24, 25] to transform the condition (6) to standard LMIs condition.
Remark 4
In many existing literature, whatever A is asymmetric or symmetric, the quantity of inequalities in the conditions is very large, e.g., \(\frac{N(N-1)}{2}\) in [5–11], (N−1) in [3, 4, 12], N in [18]. Therefore, such conditions are not applicable for large-scale networks. In contrast, there is just one inequality in (5) of Theorem 1 in this paper, which is dependent on the second largest eigenvalue of (UA+A T U) and the quantity of nodes. Notice that these two quantitative measures can be checked very easily, even for large-scale networks.
Remark 5
In [21–23], the author utilizes the normalized left eigenvector of the coupling configuration matrix A with respect to eigenvalue 0 to deduce the synchronization criterion. However, by proposing a special symmetric matrix U with zero row-sum and negative off-diagonal elements, the redundant calculation is avoided in this paper.
4 Simulation example
In this section, we will give an example to demonstrate the effectiveness of the proposed approach.
Example 1
Consider the complex dynamical network (1) consisting of N linearly coupled nodes. The isolated neural network can be described as follows:

where

and
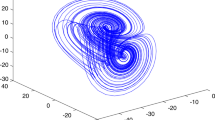
For initial values x(θ)=[0.2,−2]T, ∀θ∈[−1,0], the phase trajectories of this chaotic neural network is show in Fig. 1.

The phase trajectories of chaotic system (22)
In this example, we consider complex network containing 4 subsystems of (22). The inner coupling matrix Γ and the coupling strength c are chosen as Γ=diag{2,2} and c=2, respectively. The coupling configuration matrix A is chosen as

The reverse of the graph generated by A can been shown in Fig. 2. It is obvious that the graph contains a rooted spanning directed tree. It is easy to check that λ 1(UA+A T U)=0, λ 2(UA+A T U)=−3.101. Let c 1=7, c 2=10, T=10, by using the Matlab LMI control Toolbox to solve the LMIs in Theorem 1, we obtain a set of feasible solutions,

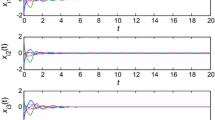
Therefore, the complex network (1) with parameters given in this example is finite-time synchronization. With initial conditions x 1(θ)=[0.2,−2]T, x 2(θ)=[0.4,−3]T, x 3(θ)=[0.6,−1.8]T, x 4(θ)=[0.5,−3.5]T, ∀θ∈[−1,0], the numerical simulations are presented in Figs. 3–4.

The corresponding graph generated by A

System trajectories x 11−x i1 (i=2,3,4)

System trajectories x 12−x i2 (i=2,3,4)
5 Conclusions
This paper has considered the finite-time synchronization problem for a class of complex dynamical networks with time-varying delays. Concerning with the mild assumption that the coupling configuration matrix can be asymmetric, weighted or reducible, the synchronization criterion has been obtained by Lyapunov functional method and the Kronecker product techniques. The provided criterion is simple and applicable to large-scale complex networks, and the criterion can be checked easily by Matlab LMI Toolbox. The numerical example has demonstrated the effectiveness of the proposed approach.
There are still a number of related interesting problems deserving further investigation. For instance, it is desirable to study synchronization problem for complex dynamical networks with stochastic disturbances, sampled data, switching topology, and so on, some of which will be investigated in the near future.
References
Boccaletti, S., Latora, V., Moreno, Y., Chavez, M., Hwang, D.U.: Complex networks: structure and dynamics. Phys. Rep. 424, 175–308 (2006)
Wang, X., Chen, G.: Complex networks: small-world, scale-free, and beyond. IEEE Circuits Syst. Mag. 3, 6–20 (2003)
Wang, X., Chen, G.: Synchronization in scale-free dynamical networks: robustness and fragility. IEEE Trans. Circuits Syst. I 49, 54–62 (2002)
Gao, H., Lam, J., Chen, G.: New criteria for synchronization stability of general complex dynamical networks with coupling delays. Phys. Lett. A 360, 263–273 (2006)
Cao, J., Li, P., Wang, W.: Global synchronization in arrays of delayed neural networks with constant and delayed coupling. Phys. Lett. A 353, 318–325 (2006)
Song, Q., Cao, J.: Synchronization of nonidentical chaotic neural networks with leakage delay and mixed time-varying delays. Adv. Differ. Equ. 16, 1–17 (2011)
Cao, J., Chen, G., Li, P.: Global synchronization in an array of delayed neural networks with hybrid coupling. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 19, 532–535 (2008)
Liu, Y., Wang, Z., Liang, J., Liu, X.: Stability and synchronization of discrete-time Markovian jumping neural networks with mixed mode-dependent time delays. IEEE Trans. Neural Netw. 20, 1102–1116 (2009)
Liang, J., Wang, Z., Liu, Y., Liu, X.: Robust synchronization of an array of coupled stochastic distrete-time delayed neural networks. IEEE Trans. Neural Netw. 19, 1910–1921 (2008)
Hu, C., Yu, J., Jiang, H., Teng, Z.: Pinning synchronization of weighted complex networks with variable delays and adaptive coupling weights. Nonlinear Dyn. 67, 1373–1385 (2012)
Zhang, Y., Xu, S., Chu, Y., Lu, J.: Robust global synchronization of complex networks with neutral-type delayed nodes. Appl. Math. Comput. 216, 768–778 (2010)
Ji, D.H., Lee, D.W., Koo, J.H., Won, S.C., Lee, S.M., Park, J.H.: Synchronization of neutral complex dynamical networks with coupling time varying delays. Nonlinear Dyn. 65, 349–358 (2011)
Li, X., Ding, C., Zhu, Q.: Synchronization of stochastic perturbed chaotic neural networks with mixed delays. J. Franklin Inst. 347, 1266–1280 (2010)
Lu, J., Kurths, J., Cao, J., Mahdavi, N., Huang, C.: Synchronization control for nonlinear stochastic dynamical networks: pinning impulsive strategy. IEEE Trans. Neural Netw. learn. Syst. 23, 285–292 (2012)
Wu, C.W.: Synchronization in networks of nonlinear dynamical systems coupled via a directed graph. Nonlinearity 18, 1057–1064 (2005)
Lu, W., Chen, T.: New approach to synchronization analysis of linearly coupled ordinary differential systems. Physica D 213, 214–230 (2006)
Chen, B., Chiang, C., Nguang, S.: Robust H ∞ synchronization design of nonlinear coupled network via fuzzy interpolation method. IEEE Trans. Circuits Syst. I 58, 349–362 (2011)
Zhao, J., Hill, D.J., Liu, T.: Synchronization of complex dynamical networks with switching topology: a switched system point of view. Automatica 45, 2502–2511 (2009)
He, W., Cao, J.: Exponential synchronization of hybrid coupled networks with delayed coupling. IEEE Trans. Neural Netw. 21, 571–583 (2010)
Lu, J., Ho, D.W.C., Liu, M.: Globally exponential synchronization in an array of asymmetric coupled neural networks. Phys. Lett. A 369, 444–451 (2007)
Lu, J., Ho, D.W.C.: Globally exponential synchronization and synchronizability for general dynamical networks. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 40, 350–361 (2010)
Lu, J., Ho, D.W.C., Cao, J.: A unified synchronization criterion for impulsive dynamical networks. Automatica 46, 1215–1221 (2010)
Lu, J., Ho, D.W.C., Cao, J., Kurths, J.: Exponential synchronization of linearly coupled neural networks with impulsive disturbances. IEEE Trans. Circuits Syst. I 58, 349–362 (2011)
Lin, X., Du, H., Li, S.: Finite-time boundedness and L 2-gain analysis for switched delay systems with norm-bounded disturbance. Appl. Math. Comput. 217, 5982–5993 (2011)
Amato, F., Ariola, M., Dorato, P.: Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 37, 1459–1463 (2001)
Amato, F., Ariola, M., Cosentino, C.: Finite-time stability of linear time-varying systems: analysis and controller design. IEEE Trans. Autom. Control 55, 1003–1008 (2010)
Qian, C., Li, J.: Global finite-time stabilization by output feedback for planar systems without observable linearization. IEEE Trans. Autom. Control 50, 885–890 (2005)
Hong, Y., Jiang, Z.: Finite-time stabilization of nonlinear systems with parametric and dynamic uncertainties. IEEE Trans. Autom. Control 51, 1950–1956 (2006)
Bartolini, G., Pisano, A., Usai, E.: On the finite-time stabilization of uncertain nonlinear systems with relative degree three. IEEE Trans. Autom. Control 52, 2134–2141 (2007)
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grant No. 61004078, No. 61104117, and the Graduate Innovation and Creativity Foundation of Jiangsu Province under Grant CXZZ11_0255.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ma, Q., Wang, Z. & Lu, J. Finite-time synchronization for complex dynamical networks with time-varying delays. Nonlinear Dyn 70, 841–848 (2012). https://doi.org/10.1007/s11071-012-0500-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0500-5