
Abstract
This paper is concerned with the dissipativity problem of stochastic neural networks with time delay. A new stochastic integral inequality is first proposed. By utilizing the delay partitioning technique combined with the stochastic integral inequalities, some sufficient conditions ensuring mean-square exponential stability and dissipativity are derived. Some special cases are also considered. All the given results in this paper are not only dependent upon the time delay, but also upon the number of delay partitions. Finally, some numerical examples are provided to illustrate the effectiveness and improvement of the proposed criteria.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, neural networks have received considerable attention due to their wide applications in various areas such as image processing, signal processing, associative memory, pattern classification, optimization, and moving object speed detection [1]. It has been shown that time delays may be an important source of oscillation, divergence, and instability in systems [2–6], and thus neural networks with time delay have been widely studied in recent years. For example, the stability analysis problem has been addressed in [7–13]. The state estimation problem has been investigated in [14–16]. The passivity problem have been studied in [17–21].
In recent years, there has been a growing interest in stochastic models since stochastic modeling has come to play an important role in many branches of science and engineering [22]. It has also been shown that a neural network could be stabilized or destabilized by certain stochastic inputs [23]. Hence, there has been an increasing interest in neural networks in the presence of stochastic perturbation, and some related results have been published. The problem of stochastic effects to neural networks has been first investigated in [24]. When time delay appears in the stochastic neural networks, the problem of stability has been investigated in [25, 26] based on the delay partitioning approach [27, 28]. The stability analysis problem has been considered for stochastic neural networks with both the discrete and distributed time delays in [29, 30]. It is noted that the results in [25, 26, 29, 30] are concerned with the constant time delay. The stability problem of stochastic neural networks with time-varying delay has been discussed in [31, 32]. The passivity analysis of stochastic neural networks with time-varying delays and parametric uncertainties has been investigated in [33], where both delay-independent and delay-dependent stochastic passivity conditions have been presented in terms of LMIs.
On the other hand, it has been shown that the theory of dissipative systems plays an important role in system and control areas, and the dissipative theory gives a framework for the design and analysis of control systems using an input–output description based on energy-related considerations [34]. Thus, dissipativity has been attracting a great deal of attention [35]. Very recently, the problem of delay-dependent dissipativity analysis has been investigated for deterministic neural networks with distributed delay in [36], where a sufficient condition has been given to guarantee the considered neural network dissipative. In [37], some delay-dependent dissipativity criteria have been established for static neural networks with time-varying or time-invariant delay. Although the importance of dissipativity has been widely recognized, few results have been proposed for the dissipativity of stochastic neural networks with time-varying delay or constant time delay, which motivates the work of this paper.
In this paper, we are concerned with the problem of dissipativity for stochastic neural networks with time delay. By use of the delay partitioning technique and the stochastic integral inequalities, some criteria are derived to ensure the exponential stability and dissipativity of the considered neural networks. Some special cases are also considered. The obtained delay-dependent results also rely upon the partitioning size. Finally, several numerical examples are given to demonstrate the reduced conservatism of the proposed methods.
Notation: The notations used throughout this paper are fairly standard. ℝn and ℝm×n denote the n-dimensional Euclidean space and the set of all m×n real matrices, respectively. The notation X>Y (X≥Y), where X and Y are symmetric matrices, means that X−Y is positive definite (positive semidefinite). I and 0 represent the identity matrix and a zero matrix, respectively. The superscript “T” represents the transpose, and diag{⋯} stands for a block-diagonal matrix. ∥⋅∥ denotes the Euclidean norm of a vector and its induced norm of a matrix. \(\mathcal{L}_{2}[0,+\infty)\) represents the space of square-integrable vector functions over [0,+∞). \(\mathbb{E}\{x\}\) means the expectation of the stochastic variable x. For an arbitrary matrix B and two symmetric matrices A and C,  denotes a symmetric matrix, where “∗” denotes the term that is induced by symmetry. Matrices, if their dimensions are not explicitly stated, are assumed to have compatible dimensions for algebraic operations.
denotes a symmetric matrix, where “∗” denotes the term that is induced by symmetry. Matrices, if their dimensions are not explicitly stated, are assumed to have compatible dimensions for algebraic operations.
2 Preliminaries
Consider the following stochastic neural network with time-delay:
where x(t)=[x 1(t) x 2(t) ⋯ x n (t)T, f(x(k))=f 1(x 1(t)) f 2(x 2(t)) ⋯ f n (x n (t))]T, x i (t) is the state of the ith neuron at time t, and f i (x i (t)) denotes the neuron activation function; y(t) is the output of the neural network, \(u(t) \in\mathcal{L}_{2}[0,+\infty)\) is the input, and ω(t) is a one-dimensional Brownian motion satisfying \(\mathbb{E}\{\mathrm{d}\omega (t)\}=0\) and \(\mathbb{E}\{\mathrm{d}\omega^{2}(t)\}=\mathrm{d}t\); C=diag{c 1,c 2,…,c n } is a diagonal matrix with positive entries; A=(a ij ) n×n and B=(b ij ) n×n are, respectively, the connection weight matrix and the delayed connection weight matrix; M 1 and M 2 are known real constant matrices; τ(t) is the time-delay and in this paper, two cases of τ(t), namely, time-varying and constant, will be discussed, respectively.
Throughout this paper, we shall use the following assumption and definitions.
Assumption 1
([12]) Each activation function f i (⋅) in (1) is continuous and bounded, and satisfies
where f i (0)=0, α 1, α 2∈ℝ, α 1≠α 2, and \(l_{i}^{-}\) and \(l_{i}^{+}\) are known real scalars and they may be positive, negative, or zero, which means that the resulting activation functions may be nonmonotonic and more general than the usual sigmoid functions and Lipschitz-type conditions.
Definition 1
[22] Stochastic time-delay neural network (1) with u(t)=0 is said to be mean-square exponentially stable if there is a positive constant λ such that
We are now in a position to introduce the definition on dissipativity. Let the energy supply function of neural network (1) be defined by

where \(\mathcal{Q}\), \(\mathcal{S,}\) and \(\mathcal{R}\) are real matrices with \(\mathcal{Q}\), \(\mathcal{R}\) symmetric, and \(\langle{a},b\rangle_{T}=\int_{0}^{T}a^{\mathrm{T}}b\,\mathrm{d}t\). Without loss of generality, it is assumed that \(\mathcal{Q}\leq 0\) and denoted that \(-\mathcal{Q}=\mathcal{Q}_{-}^{\mathrm{T}}\mathcal{Q}_{-}\) for some \(\mathcal{Q}_{-}\).
Definition 2
Neural network (1) is said to be strictly \((\mathcal{Q},\mathcal {S},\mathcal{R})\)-γ-dissipative if, for some scalar γ>0, the following inequality:
holds under zero initial condition for any nonzero disturbance \(u \in \mathcal{L}_{2}[0,\infty)\).
The main purpose of this paper is to establish some delay-dependent conditions, which ensures neural network (1) is mean-square exponentially stable and strictly \((\mathcal{Q},\mathcal{S},\mathcal {R})\)-γ-dissipative.
To end this section, we introduce the following integral inequalities, which will play important roles in deriving main results.
Lemma 1
(Jensen inequality) [38]
For any matrix W>0, scalars γ 1 and γ 2 satisfying γ 2>γ 1, a vector function ω:[γ 1,γ 2]→ℝn, if the following integrations concerned are well defined, then

Lemma 2
Let n-dimensional vector functions x(t), φ(t), and g(t) satisfy the stochastic differential equation
where
ω(t) follows the same definition as that in (1). For any matrix
 , scalars
γ
1, γ
2, γ(t) satisfying
γ
1≤γ(t)≤γ
2, if the following integrations concerned are well defined, then
, scalars
γ
1, γ
2, γ(t) satisfying
γ
1≤γ(t)≤γ
2, if the following integrations concerned are well defined, then

where

Proof
Denote \(\delta_{1}(t)=\int_{t-\gamma(t)}^{t-\gamma_{1}}\varphi(\alpha )\,\mathrm{d}\alpha\) and \(\delta_{2}(t)=\int_{t-\gamma_{2}}^{t-\gamma(t)}\varphi(\alpha)\, \mathrm{d}\alpha\). When γ 1<γ(t)<γ 2, according to Lemma 1, we have that

Based on the lower bounds lemma of [39], we get

which implies

Then, we can get from (9) and (11) that

It is noted that when γ(t)=γ 1 or γ(t)=γ 2, we have δ 1(t)=0 or δ 2(t)=0, respectively, and thus (12) still holds based on Lemma 1. On the other hand, it is clear from (7) that

and

Substituting (13) and (14) into (12) and considering

we can get (8) immediately. This completes the proof. □
Remark 1
It is noted that a stochastic integral inequality is proposed in Lemma 2 based on the lower bounds lemma of [39]. It can be found that when γ(t)=γ 1 or γ(t)=γ 2, the stochastic integral inequality (8) reduces to the following stochastic integral inequality:

3 Main results
In this section, we make use of the delay partitioning technique to derive some new delay-dependent dissipativity criteria for neural network (1). Both time-varying and constant time delays are treated, respectively. For presentation convenience, we denote e i =[02n×2(i−1)n I 2n 02n×2(m+1−i)n ] (i=1,2,…,m+1) and

3.1 The case of a time-varying delay
In this subsection, the delay τ(t) is time-varying and satisfies 0≤τ(t)≤τ and \(\dot{\tau}(t)\leq \mu\). It is noted that the neural network (1) can be rewritten as
where \(\varphi(t)=\mathcal{C}_{1}e_{1}\theta(t)+\mathcal{C}_{2}\eta(t-\tau (t))+u(t)\) and g(t)=M 1 Π 1 e 1 θ(t)+M 2 Π 1 η(t−τ(t)).
Theorem 1
Given an integer
m>0, neural network (1) is mean-square exponentially stable and strictly
\((\mathcal{Q},\mathcal{S},\mathcal {R})\)-γ-dissipative, if there exist matrices
P>0,  (i=1,2,…,m), Y>0, Q>0, diagonal matrices
F
l
(l=1,2,…,m+2), G
1=diag{λ
1,λ
2,…,λ
n
}>0, G
2=diag{δ
1,δ
2,…,δ
n
}>0, and a scalar
γ>0, such that for any
\(j\in\mathcal{J}=\{ 1,2,\ldots,m\}\)
(i=1,2,…,m), Y>0, Q>0, diagonal matrices
F
l
(l=1,2,…,m+2), G
1=diag{λ
1,λ
2,…,λ
n
}>0, G
2=diag{δ
1,δ
2,…,δ
n
}>0, and a scalar
γ>0, such that for any
\(j\in\mathcal{J}=\{ 1,2,\ldots,m\}\)

where \(\hat{Z}= (\frac{\tau}{m} )^{2}\sum_{i=1}^{m}Z_{i}\), \(\hat{P}=P+(G_{1}+G_{2})(L^{+}-L^{-})\), and

Proof
First, let us consider stability of neural network (1) with u(t)=0. By Schur complement, we obtain from (17) that

It is clear from (18) that we can always find two small enough scalars ε 1>0 and ε 2>0 such that

where \(\hat{\varXi}_{11}^{j}= \varXi_{11}^{j}+\tau^{2}\varepsilon_{1}e_{1}^{\mathrm{T}}\varPi_{1}^{\mathrm{T}}\varPi_{1}e_{1}\) and \(\bar{Z}= (\frac{\tau}{m} )^{2}\sum_{i=1}^{m}Z_{i}+\tau^{2}\varepsilon_{2}\). Choose the following Lyapunov–Krasovskii functional for neural network (1) with u(t)=0:
where

where \(\hat{\varphi}(t)=\mathcal{C}_{1}e_{1}\theta(t)+\mathcal{C}_{2}\eta (t-\tau(t))\). By Itô’s formula, we have
where σ(t)=2x(t)T(P−L − G 1+L + G 2)g(t)+2f(x(t))T(G 1−G 2)g(t). It can be calculated that




It is noted that, for any t≥0, there should exist an integer \(j\in\mathcal{J}\) such that \(\tau(t)\in [\frac{(j-1)\tau}{m},\,\frac {j\tau}{m} ]\). Then based on Lemma 2, we can get that

where

Meanwhile, we can also get from (15) that

On the other hand, by (2), we have that for any i∈{1,2,…,m+1}

which implies
We can also get from (2) that
On the other hand, it can be easily obtained from (20) that there exists a scalar ε 3>0 such that

Thus, we have from (22)–(27) and (29)–(31) that for \(\tau(t)\in [\frac{(j-1)\tau}{m},\,\frac{j\tau }{m} ]\),

Let λ>0 be sufficiently small such that
and for any \(j\in\mathcal{J}\),
Then we can get from (32), (33), and (34) that
By Itô’s formula, we have

Integrating from 0 to t and taking expectation on both sides of (36) yields

Combining (20), (35), and (37), we have

which implies (3) holds. Thus, the mean-square exponential stability of neural network (1) is proved.
Now let us proceed to discuss the strictly \((\mathcal{Q},\mathcal {S},\mathcal{R})\)-γ-dissipativity of neural network (1). To this end, choose the following Lyapunov–Krasovskii functional for neural network (1):
where V 1(t) and V 2(t) follow the same definitions as those in (20), and
Applying a similar analysis method employed in the proof of stability, we have that for \(\tau(t)\in [\frac{(j-1)\tau}{m},\,\frac{j\tau }{m} ]\),

where

We can get from (18) that for any nonzero disturbance u(t)∈L 2[0,∞),
which, by Dynkin’s formula, implies under zero initial condition

Thus, we find (5) holds. Therefore, neural network (1) is strictly \((\mathcal{Q},\mathcal{S},\mathcal{R})\)-γ-dissipative. This completes the proof. □
Remark 2
A dissipativity condition is proposed in Theorem 1 for neural network (1) based on the delay partitioning technique and stochastic integral inequality (8) and (15). It is noted that the Lyapunov–Krasovskii functional (20) makes full use of the information on neuron activation functions and the involved time delay, and thus our result has less conservatism. Moreover, the conservatism reduction of the proposed condition becomes more obvious with the partitioning getting thinner (i.e., m becoming larger), which will be demonstrated in Sect. 4. It should be pointed out that the LMIs in (17) are not only over the matrix variables, but also over the scalar γ, and thus by setting δ=−γ and minimizing δ subject to (17), we can obtain the optimal dissipativity performance γ (by γ=−δ).
Remark 3
If we make use of the free-weighting matrix method together with the delay partitioning technique to deal with the same problem, then in order to get a less conservative result, for any subinterval \([\frac{(j-1)\tau}{m},\,\frac{j\tau}{m} ]\), we need to introduce the following two equalities:

and

Therefore, 4mn 2 decision variables should be introduced. But in this paper, we utilize the stochastic integral inequality (8) to deal with the term \(\int_{t-\frac{j\tau}{m}}^{t-\frac{j-1}{m}\tau}\hat {\varphi}(s)\,\mathrm{d}s\) instead of the free-weighting matrix method, and only mn 2 decision variables are required. Thus, our condition has computational advantage over the condition based on the free-weighting matrix method.
From Theorem 1, it is easily get the following stability condition for neural network (1) with u(t)=0.
Corollary 1
Given an integer
m>0, neural network (1) with
u(t)=0 is mean-square exponentially stable, if there exist matrices
P>0,  (i=1,2,…,m), Y>0, Q>0, diagonal matrices
F
l
(l=1,2,…,m+2), G
1=diag{λ
1,λ
2,…,λ
n
}>0, and
G
2=diag{δ
1,δ
2,…,δ
n
}>0, such that for any
\(j\in\mathcal{J}\),
(i=1,2,…,m), Y>0, Q>0, diagonal matrices
F
l
(l=1,2,…,m+2), G
1=diag{λ
1,λ
2,…,λ
n
}>0, and
G
2=diag{δ
1,δ
2,…,δ
n
}>0, such that for any
\(j\in\mathcal{J}\),

where \(\varXi_{12}^{j}\), \(\varXi_{22}^{j}\), \(\hat{Z}\), and \(\hat{P}\) follow the same definitions as those in Theorem 1, and

Remark 4
It is noted that the stability condition of [32] is only valid for the case of \(l_{i}^{-}=0\). Moreover, if setting m=1, λ
i
=0, δ
i
=0,  , and
, and  , the Lyapunov–Krasovskii functional (20) coincides with that of [32]. Thus, our Lyapunov–Krasovskii functional is much more general than that of [32] even for the case of m=1, that is, our result has less conservatism than the condition of [32] even when m=1.
, the Lyapunov–Krasovskii functional (20) coincides with that of [32]. Thus, our Lyapunov–Krasovskii functional is much more general than that of [32] even for the case of m=1, that is, our result has less conservatism than the condition of [32] even when m=1.
Next, we specialize Theorem 1 to the problem of passivity analysis of neural network (1). Choosing \(\mathcal{Q}=0\), \(\mathcal{S}=I\), and \(\mathcal{R}=2\gamma I\), we can get the following corollary based on Theorem 1.
Corollary 2
Given an integer
m>0, neural network (1) is passive, if there exist matrices
P>0,  (i=1,2,…,m), Y>0, Q>0, diagonal matrices
F
l
(l=1,2,…,m+2), G
1=diag{λ
1,λ
2,…,λ
n
}>0, G
2=diag{δ
1,δ
2,…,δ
n
}>0, and a scalar
γ>0, such that for any
j∈{1,2,…,m}
(i=1,2,…,m), Y>0, Q>0, diagonal matrices
F
l
(l=1,2,…,m+2), G
1=diag{λ
1,λ
2,…,λ
n
}>0, G
2=diag{δ
1,δ
2,…,δ
n
}>0, and a scalar
γ>0, such that for any
j∈{1,2,…,m}

where \(\bar{{\varXi}}_{11}^{j}\) follows the same definition as that in Corollary 1, \(\varXi_{12}^{j}\), \(\varXi_{22}^{j}\), \(\hat{Z}\), and \(\hat{P}\) follow the same definitions as those in Theorem 1, and \(\bar{\varXi}_{13}=-e_{1}^{\mathrm{T}}\varPi_{2}^{\mathrm{T}}+e_{1}^{\mathrm{T}}\varPi_{1}^{\mathrm{T}}(P-L^{-}G_{1}+L^{+}G_{2})+e_{1}^{\mathrm{T}}\varPi_{2}^{\mathrm{T}}(G_{1}-G_{2})\).
Remark 5
It should be pointed out that when λ
i
=0, δ
i
=0, Q=0,  , and Z
i
=mZ, the Lyapunov–Krasovskii functional (20) coincides with that of [33]. Thus, our Lyapunov–Krasovskii functional is much more general than that of [33]. Moreover, the passivity condition of [33] is only valid for the case of \(l_{i}^{-}=0\). Thus, our result is more effective that of [33].
, and Z
i
=mZ, the Lyapunov–Krasovskii functional (20) coincides with that of [33]. Thus, our Lyapunov–Krasovskii functional is much more general than that of [33]. Moreover, the passivity condition of [33] is only valid for the case of \(l_{i}^{-}=0\). Thus, our result is more effective that of [33].
3.2 The case of a constant time delay
For simplicity, we rewrite neural network (1) as
where \(\check{\varphi}(t)=(\mathcal{C}_{1}e_{1}+\mathcal{C}_{2}e_{m+1})\theta (t)+u(t)\) and \(\hat{g}(t)=(M_{1}\varPi_{1}e_{1}+M_{2}\varPi_{1}e_{m+1})\theta(t)\).
Theorem 2
Given an integer m>0, neural network (1) is mean-square exponentially stable and strictly \((\mathcal{Q},\mathcal{S},\mathcal {R})\)-γ-dissipative, if there exist matrices P>0, Z i >0 (i=1,2,…,m), Q>0, diagonal matrices F l (l=1,2,…,m+1), G 1=diag{λ 1,λ 2,…,λ n }>0, G 2=diag{δ 1,δ 2,…,δ n }>0, and a scalar γ>0, such that

where Ξ 13, \(\hat{Z}\), and \(\hat{P}\) follow the same definitions as those in Theorem 1, and

Proof
First, let us consider stability of neural network (1) with u(t)=0. By Schur complement, we obtain from (46) that

It is clear from (47) that we can always find two small enough scalars ε 1>0 and ε 2>0 such that

where \(\hat{\varOmega}_{11}=\varOmega_{11}+\tau^{2}\varepsilon_{1}e_{1}^{\mathrm{T}}\varPi_{1}^{\mathrm{T}}\varPi_{1}e_{1}\). Choose the following Lyapunov–Krasovskii functional for neural network (1) with u(t)=0:
where V 1(t) follows the same definition as that in (20), and

where \(\bar{\varphi}(t)=(\mathcal{C}_{1}e_{1}+\mathcal{C}_{2}e_{m+1})\theta (t)\). By Itô’s formula, we have
where \(\sigma(t)=2x(t)^{\mathrm{T}}(P-L^{-}G_{1}+L^{+}G_{2})\hat {g}(t)+2f(x(t))^{\mathrm{T}}(G_{1}-G_{2})\hat{g}(t)\). It can be calculated that




We can get from (15) that

On the other hand, it can be easily obtained from (49) that there exists a scalar ε 3>0 such that

Thus, we have from (51)–(56) and (29) that

Let λ>0 be sufficiently small such that

which combining with (57) implies
Then, by using a similar method as employed in Theorem 1, we can get prove the mean-square exponential stability of neural network (1).
Now let us proceed to discuss the strictly \((\mathcal{Q},\mathcal {S},\mathcal{R})\)-γ-dissipativity of neural network (1). To this end, choose the following Lyapunov–Krasovskii functional for neural network (1):
where V 1(t) follows the same definition as that in (20), V 2(t) follows the same definition as that in (49), and
Then, by using a similar method as employed in Theorem 1, we can easily get that neural network (1) is strictly \((\mathcal {Q},\mathcal{S},\mathcal{R})\)-γ-dissipative. This completes the proof. □
Similarly, it is easy to get the following stability and passibility conditions for neural network (1) with constant time delay.
Corollary 3
Given an integer m>0, neural network (1) with u(t)=0 is mean-square exponentially stable, if there exist matrices P>0, Z i >0 (i=1,2,…,m), Q>0, diagonal matrices F l (l=1,2,…,m+1), G 1=diag{λ 1,λ 2,…,λ n }>0, and G 2=diag{δ 1,δ 2,…,δ n }>0, such that

where \(\hat{Z}\), and \(\hat{P}\) follow the same definitions as those in Theorem 1, Ω 13 and Ω 14 follow the same definitions as those in Theorem 2, and

Remark 6
It is noted that compared with the Lyapunov–Krasovskii functionals applied in [25, 26], the Lyapunov–Krasovskii functional (49) includes more information on neuron activation functions and the involved constant delay. Thus, our Lyapunov–Krasovskii functional is more general and leads to an improved stability criterion.
Corollary 4
Given an integer m>0, neural network (1) is passive, if there exist matrices P>0, Z i >0 (i=1,2,…,m), Q>0, diagonal matrices F l (l=1,2,…,m+1), G 1=diag{λ 1,λ 2,…,λ n }>0, G 2=diag{δ 1,δ 2,…,δ n }>0, and a scalar γ>0, such that

where \(\bar{\varOmega}_{11}\) follows the same definition as that in Corollary 3, \(\bar{\varXi}_{13}\) follows the same definitions as those in Corollary 2, \(\hat{Z}\), and \(\hat{P}\) follow the same definitions as those in Theorem 1, Ω 13 and Ω 14 follow the same definitions as those in Theorem 2.
4 Numerical examples
In this section, we shall give several numerical examples to show the validity and potential of our developed theoretical results.
Example 1
Consider neural network (1) with u(t)=0 and the following parameters:

and A=0, \(l_{1}^{-}=l_{2}^{-}=l_{3}^{-}=0\), \(l_{1}^{+}=0.4129\), \(l_{2}^{+}=3.8993\), \(l_{3}^{+}=1.0160\).
In this example, we suppose the time delay is a constant time delay. Applying the stability criteria in [25, 26], and Corollary 3 in this paper, the maximum admissible upper bounds of τ are listed in Table 1, from which it can be found that Corollary 3 in this paper has less conservative than the those criteria in [25, 26].
Example 2
Consider neural network (1) with u(t)=0 and the following parameters:

and take the activation functions f 1(s)=f 2(s)=tanh(0.5s). It is clear that the activation functions satisfy Assumption 1 with \(l_{1}^{-}=l_{2}^{-}=0\) and \(l_{1}^{+}=0.5\), \(l_{2}^{+}=0.5\).
In this example, we suppose the time delay is a time-varying delay. By using the stability criteria in [32] and Corollary 1 in this paper, the maximum admissible upper bounds of τ for various μ are listed in Table 2, from which it can be found that Corollary 1 in this paper gives better results than the condition in [32] even for m=1.
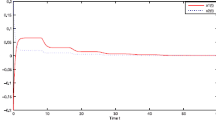
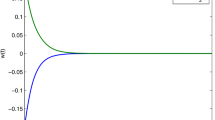
It is assumed that τ(t)=3.97+sin(0.8t). A straightforward calculation gives τ=4.97 and μ=0.8. The corresponding state responses of the considered neural network are shown at Fig. 1, where the initial condition x(t)=[3 2]T t∈[−4.97, 0]. We can find from Fig. 1 that the corresponding state responses converge to zero.

State responses of the considered neural network
Example 3
Consider neural network (1) with the following parameters:

In this example, we suppose the time delay is a time-varying delay. We first compare the passivity condition in Corollary 2 of this paper with that of [33]. To this end, we let τ=1.5, \(l_{1}^{-}=l_{2}^{-}=0\), and \(l_{1}^{+}=l_{2}^{+}=1\). Table 3 provides the minimum passivity performance γ for different methods. It is clear that Corollary 1 in this paper greatly improves the criterion in [33]. In particular, when μ=0.8, the method of [33] fails, but Corollary 2 of this paper is still valid.
Next, let us pay attention to the dissipativity of the considered neural network and choose

τ=1, \(l_{1}^{-}=-0.1\), \(l_{2}^{-}=0.1\), and \(l_{1}^{+}=l_{2}^{+}=0.9\). The optimal dissipativity performance γ for different m and μ can be found in Table 4, from which we can find that the optimal dissipativity performance γ depends on m and μ. Specifically, when m is fixed, the larger μ(≤1) corresponds to the smaller γ, and when μ is fixed, the larger m corresponds to the larger γ. Furthermore, when μ(≥1), the conservatism of Theorem 1 is dependent on m and independent of μ.
5 Conclusion
In this paper, the problem of dissipativity analysis has been investigated for stochastic neural networks with time delay using the delay partitioning technique. A stochastic integral inequality has been given. Several delay-dependent sufficient conditions have been proposed to guarantee the exponential stability and dissipativity of the considered neural networks. Some other cases have also been considered. All the results given in this paper are delay-dependent as well as partition-dependent. The effectiveness as well as the reduced conservatism of the derived results has been shown by several numerical examples. We would like to point out that it is possible to extend our main results to more general neural networks with mixed time-delays, uncertainties, and Markov jump parameters, and the corresponding results will appear in the near future.
References
Gupta, M.M., Jin, L., Homma, N.: Static and Dynamic Neural Networks: From Fundamentals to Advanced Theory. Wiley-IEEE Press, New York (2003)
Chen, H., Zhu, C., Hu, P., Zhang, Y.: Delayed-state-feedback Exponential Stabilization for Uncertain Markovian Jump Systems with Mode-dependent Time-varying State Delays, Nonlinear Dynamics. Nonlinear Dyn. 69, 1023–1039 (2012)
Park, J.H.: Design of dynamic output feedback controller for a class of neutral systems with discrete and distributed delays. In: IEE Proceedings Control Theory and Applications, vol. 151, pp. 610–614 (2004)
Zhang, Y., Wu, A., Duan, G.: Improved L 2−L ∞ filtering for stochastic time-delay systems. Int. J. Control. Autom. Syst. 8, 741–747 (2010)
Jiang, B., Du, D., Cocquempot, V.: Fault detection for discrete-time switched systems with interval time-varying delays. Int. J. Control. Autom. Syst. 9, 396–401 (2011)
Xu, L.: Exponential P-stability of singularly perturbed impulsive stochastic delay differential systems. Int. J. Control. Autom. Syst. 9, 966–972 (2011)
Zhang, Z., Zhang, T., Huang, S., Xiao, P.: New global exponential stability result to a general Cohen–Grossberg neural networks with multiple delays. Nonlinear Dyn. 67, 2419–2432 (2012)
Park, J.H., Kwon, O.M., Lee, S.M.: LMI optimization approach on stability for delayed neural networks of neutral-type. Appl. Math. Comput. 196, 236–244 (2008)
Li, T., Wang, T., Song, A., Fei, S.: Exponential synchronization for arrays of coupled neural networks with time-delay couplings. Int. J. Control. Autom. Syst. 9, 187–196 (2011)
Li, H., Chen, B., Zhou, Q., Qian, W.: Robust stability for uncertain delayed fuzzy Hopfield neural networks with Markovian jumping parameters. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 39, 94–102 (2009)
Faydasicok, O., Arik, S.: Equilibrium and stability analysis of delayed neural networks under parameter uncertainties. Appl. Comput. Math. 218, 6716–6726 (2012)
Liu, Y., Wang, Z., Liu, X.: Global exponential stability of generalized recurrent neural networks with discrete and distributed delays. Neural Netw. 19, 667–675 (2006)
Tian, J., Li, Y., Zhao, J., Zhong, S.: Delay-dependent stochastic stability criteria for Markovian jumping neural networks with mode-dependent time-varying delays and partially known transition rates. Appl. Comput. Math. 218, 5769–5781 (2012)
Wang, Z., Ho, D.W.C., Liu, X.: State estimation for delayed neural networks. IEEE Trans. Neural Netw. 16, 279–284 (2005)
Wang, Z., Liu, Y., Liu, X.: State estimation for jumping recurrent neural networks with discrete and distributed delays. Neural Netw. 22, 41–48 (2009)
Ahn, C.K.: Delay-dependent state estimation for T-S fuzzy delayed Hopfield neural networks. Nonlinear Dyn. 61, 483–489 (2010)
Li, H., Gao, H., Shi, P.: New passivity analysis for neural networks with discrete and distributed delays. IEEE Trans. Neural Netw. 21, 1842–1847 (2011)
Li, H., Lam, J., Cheung, K.C.: Passivity criteria for continuous-time neural networks with mixed time-varying delays. Appl. Math. Comput. (2012, in press). doi:10.1016/j.amc.2012.05.002
Wu, Z., Park, J.H., Su, H., Chu, J.: New results on exponential passivity of neural networks with time-varying delays. Nonlinear Anal., Real World Appl. 13, 1593–1599 (2012)
Kwon, O.M., Park, J.H., Lee, S.M., Cha, E.J.: A new augmented Lyapunov–Krasovskii functional approach to exponential passivity for neural networks with time-varying delays. Appl. Comput. Math. 217, 10231–10238 (2011)
Song, Q., Cao, J.: Passivity of uncertain neural networks with both leakage delay and time-varying delay. Nonlinear Dyn. 67, 1695–1707 (2012)
Mao, X.: Stochastic Differential Equations and Applications. Horwood, Chichester (2007)
Blythe, S., Mao, X., Liao, X.: Stability of stochastic delay neural networks. J. Franklin Inst. 338, 481–495 (2001)
Liao, X., Mao, X.: Exponential stability and instability of stochastic neural networks. In: Stochastic Analysis and Applications, vol. 14, pp. 165–185 (1996)
Yang, R., Gao, H., Shi, P.: Novel robust stability criteria for stochastic Hopfield neural networks with time delays. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 39, 467–474 (2009)
Chen, Y., Zheng, W.: Stability and L 2 performance analysis of stochastic delayed neural networks. IEEE Trans. Neural Netw. 22, 1662–1668 (2011)
Lam, J., Gao, H., Wang, C.: Stability analysis for continuous systems with two additive time-varying delay components. Syst. Control. Lett. 56, 16–24 (2007)
Peaucelle, D., Arzelier, D., Henrion, D., Gouaisbaut, F.: Quadratic separation for feedback connection of an uncertain matrix and an implicit linear transformation. Automatica 43, 795–804 (2007)
Wang, Z., Liu, Y., Fraser, K., Liu, X.: Stochastic stability of uncertain Hopfield neural networks with discrete and distributed delays. Phys. Lett. A 354, 288–297 (2006)
Wang, Z., Liu, Y., Li, M., Liu, X.: Stability analysis for stochastic Cohen–Grossberg neural networks with mixed time delays. IEEE Trans. Neural Netw. 17, 814–820 (2006)
Yang, R., Zhang, Z., Shi, P.: Exponential stability on stochastic neural networks with discrete interval and distributed delays. IEEE Trans. Neural Netw. 21, 169–175 (2010)
Liu, F., Wu, M., He, Y., Yokoyama, R.: Improved delay-dependent stability analysis for uncertain stochastic neural networks with time-varying delay. Neural Comput. Appl. 20, 441–444 (2011)
Chen, Y., Wang, H., Xue, A., Lu, R.: Passivity analysis of stochastic time-delay neural networks. Nonlinear Dyn. 61, 71–82 (2010)
Brogliato, B., Lozano, R., Maschke, B., Egeland, O.: Dissipative Systems Analysis and Control: Theory and Applications. Springer, London (2007)
Feng, Z., Lam, J., Gao, H.: α-Dissipativity analysis of singular time-delay systems. Automatica 47, 2548–2552 (2011)
Feng, Z., Lam, J.: Stability and dissipativity analysis of distributed delay cellular neural networks. IEEE Trans. Neural Netw. 22, 976–981 (2011)
Wu, Z., Lam, J., Su, H., Chu, J.: stability and dissipativity analysis of static neural networks with time delay. IEEE Trans. Neural Netw. Learn. Syst. 23, 199–210 (2012)
Shu, Z., Lam, J.: Exponential estimates and stabilization of uncertain singular systems with discrete and distributed delays. Int. J. Control 81, 865–882 (2008)
Park, P.G., Ko, J.W., Jeong, C.: Reciprocally convex approach to stability of systems with time-varying delays. Automatica 47, 235–238 (2011)
Acknowledgements
The work was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science, and Technology (2010-0009373). This work was also supported in part by the National Creative Research Groups Science Foundation of China under Grant 60721062, the National High Technology Research and Development Program of China 863 Program under Grant 2006AA04 Z182, and the National Natural Science Foundation of China under Grants 60736021 and 61174029.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wu, ZG., Park, J.H., Su, H. et al. Dissipativity analysis of stochastic neural networks with time delays. Nonlinear Dyn 70, 825–839 (2012). https://doi.org/10.1007/s11071-012-0499-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0499-7