
Abstract
In this paper, an adaptive fuzzy sliding mode control (AFSMC) for Micro-Electro-Mechanical Systems (MEMS) triaxial gyroscope is proposed. First, a novel adaptive identification approach with sliding mode controller which can identify angular velocity and other system parameters is developed. And in order to reduce the chattering, an AFSMC is designed to approximate the upper bound of the uncertainties and external disturbances. Based on Lyapunov methods, these adaptive laws can guarantee that the system is asymptotically stable. Numerical simulations are investigated to verify the effectiveness of the proposed AFSMC scheme.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The Micro-Electro-Mechanical Systems (MEMS) are penetrating more and more into measurement and control problems because of their small size, low cost, and low power consumption. The vibrating gyroscope is one of the MEMS devices that commonly used for measuring angular velocity. MEMS gyroscopes are widely applied in the area of aviation, navigation, automotive, biomedicine, military affairs, and consumer electronics. The performance of the MEMS gyroscopes is deteriorated by the effects of time varying parameters, environment variations, quadrature errors, and external disturbances. Therefore, advanced control such as adaptive control, sliding mode control, and intelligent control are necessary to be used to control the MEMS gyroscope and improve its performance and stability.
In the last few years, some control approaches have been proposed to control the MEMS gyroscope. Increasing attention has been given to the adaptive tracking control of MEMS gyroscope. Adaptive control is a technique of applying system identification method to obtain a model of the process with its environment and using this model to design a real-time controller. Therefore, adaptive control can effectively solve the robustness problem in the presence of unknown model parameters and external disturbances. Park [1] and Leland [2] presented an adaptive controller for a MEMS gyroscope, which drives both axes of vibration and controls the entire operation of the gyroscope. John et al. [3] extends the park’s method [1] and presents an adaptive controller for triaxial angular sensors. Batur et al. [4] developed a sliding mode control for a MEMS gyroscope. Sung et al. [5] derived a phase-domain design approach to study the mode-matched control of gyroscope. Park et al. [6] developed adaptive control and trajectory-switching algorithm for a MEMS Gyroscope. Adaptive sliding mode control has the advantages of combining the robustness of variable structure methods with the tracking capability of adaptive control strategies. An adaptive sliding mode controller with upper bound estimation has been developed to control the vibration of MEMS gyroscope [7]. System nonlinearities are inevitable in actual engineering and require the controller to be either adaptive or robust to these model uncertainties. Intelligent control approaches such as neural network and fuzzy control do not require mathematical models and have ability to approximate nonlinear systems. Neural network technologies have been applied into the nonlinear control system [8–10]. Wang [11] proposed universal approximation theorem and demonstrated that the arbitrary function of a certain set of functions can be approximated with arbitrary accuracy using fuzzy system on a compact domain. Therefore, fuzzy logic system which can approximate arbitrary nonlinear functions makes it a useful tool for adaptive application. Guo et al. [12] proposed adaptive fuzzy sliding mode controller for robot manipulator. Yoo et al. [13] developed adaptive controller for robot manipulator using fuzzy compensator. Wai et al. [14, 15] presented adaptive fuzzy sliding-mode control with application to electrical servo drive. Chen et al. [16] derived adaptive fuzzy output tracking control of MIMO nonlinear uncertain systems. Ren et al. [17] investigated a fuzzy adaptive high-gain-based observer backstepping control for SISO nonlinear systems with dynamical uncertainties. Cetin et al. [18] developed a new semi-active nonlinear adaptive controller for structures using MR damper. Li et al. [19] derived an adaptive fuzzy controller for uncertain MIMO nonlinear systems in block-triangular forms. Wen et al. [20] designed an adaptive fuzzy-neural tracking controller for uncertain nonlinear discrete-time systems in the NARMAX form.
In this paper, the study of AFSMC is extended from two axial angular sensors to triaxial angular sensors. The contribution of this paper is the integration of the adaptive sliding mode control and the nonlinear approximation of AFSMC. Consider the MEMS triaxial gyroscope with parameter uncertainties and external disturbances, a novel adaptive identification approach based on the sliding mode control that can identify angular velocity and other system parameters is developed. As we know, the sliding mode control requires the upper bound of uncertainties and disturbances to specify the sliding mode gain to satisfy the requirement of stability and robustness. However, the bound of the uncertainties is difficult to measure in advance for practical applications and high sliding mode gain will cause large chattering. Therefore, an AFSMC is designed to approximate the upper bound of the uncertainties and external disturbances. Thus, the chattering in control efforts is reduced greatly. The proposed adaptive fuzzy sliding mode controller can guarantee the stability of the closed loop system and improve the robustness for external disturbances and model uncertainties.
The main motivations in the paper are highlighted as follows:
-
1.
The adaptive fuzzy control method has been extended to the control of MEMS gyroscope in this paper. An adaptive fuzzy sliding mode control is adopted to approximate the unknown upper bound of the uncertainties and external disturbances. The advantage of using adaptive fuzzy sliding mode control is that we need not know the upper bound of uncertainties and disturbances in advance. It will be convenient for us to control the MEMS gyroscope since the upper bound of the uncertainties and external disturbances can be adaptively tuned. This is the most important feature of the proposed control as compared with the existing work.
-
2.
An adaptive fuzzy control is incorporated into the MEMS control system to strengthen the robustness of the control system. An adaptive sliding mode controller is derived to identify angular velocity and other system parameters of MEMS triaxial gyroscopes and an adaptive fuzzy control method based on the sliding-mode control is developed to estimate the optimal upper bound of uncertainties and disturbance. This is the successfully application example using fuzzy control with the MEMS gyroscope. Both of these features are the innovative developments of intelligent adaptive control approach incorporated into conventional adaptive control for the MEMS gyroscope.
The organization of this paper is as follows: In Sect. 2, the dynamics of MEMS triaxial gyroscope is described through nondimensional transformation. In Sect. 3, an adaptive sliding mode control strategy is derived to identify angular velocity and other system parameters of MEMS triaxial gyroscopes. In Sect. 4, an adaptive fuzzy control method based on the sliding-mode control is developed to estimate the optimal upper bound of uncertainties and disturbance. Simulation results are presented in Sect. 5 to verify the effectiveness of the proposed adaptive fuzzy sliding mode control. Finally, conclusions are given in Sect. 6.
2 Dynamics of MEMS triaxial gyroscope
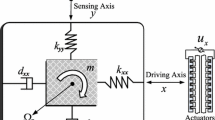
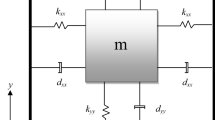
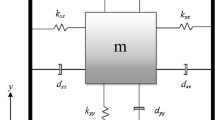
This section describes the dynamics of MEMS triaxial gyroscope. We assume that the gyroscope is moving with a constant linear speed. The gyroscope is rotating at a constant angular velocity. The centrifugal forces are assumed negligible because of small displacements. The gyroscope undergoes rotations along x, y, and z axis.
Referring to [6], the dynamics of triaxial gyroscope becomes
where m is the mass of proof mass. Fabrication imperfections contribute mainly to the asymmetric spring terms k xy , k xz , and k yz and asymmetric damping terms d xy , d xz , and d yz . The spring terms in the x, y and z direction are k xx , k yy , and k zz , respectively. The damping terms in the x, y, and z direction are d xx , d yy , and d zz .
Ω x , Ω y , and Ω z are angular velocities in the x, y, and z direction, respectively. u x , u y , and u z are the control forces in the x, y, and z direction, respectively.
Dividing Eq. (1) by the reference mass and rewriting the dynamics in vector forms result in
where

Using nondimensional time t ∗=w 0 t, and dividing both sides of equation by reference length \(w_{0}^{2}\) and the reference length q 0 give the final form of the nondimensional equation of motion as
We define the new parameters as follows:

Ignoring the superscript (∗) for notational clarity, the nondimensional representation of (1) and (2) is
where
3 Angular velocity estimation based on adaptive sliding mode control
In this section, we consider the parameter uncertainties and external disturbances, an adaptive sliding mode control strategy is presented to identify angular velocity and other system parameters of MEMS triaxial gyroscopes.
Rewriting the gyroscope model in state-space equation as
where

The reference models are chosen at the given different frequency and amplitude:

The state-space equation of reference model can be rewritten as
where

Referring Eq. (5), we consider the system with parameter uncertainties and external disturbances as
where ΔA is the unknown parameter uncertainties of the matrix A, f(t) is the external disturbances.
To ensure the achievement of the control objective, we make the following assumptions.
Assumption 1
(Matching condition)
There exists unknown matrix functions of appropriate dimensions D(t) and G(t) such that
where BD(t) is the matched uncertainty and BG(t) is the matched disturbance
Under the assumption of matching condition, (7) can be rewritten as follows:

where Bf m represents the lumped matched parameter uncertainties and external disturbances, which is given by
Assumption 2
(Matching condition)
There exists a constant matrix K ∗ such that the following matching condition A+BK ∗T=A m can be always satisfied, where
Assumption 3
(Bounded condition)
There exists a positive definite matrix f=diag[f 1 f 2 f 3] such that the bounded condition |f mi |<f i (i=1,2,3) can always be satisfied.
Define the tracking error as follows:
Then the derivative of tracking error is

Define the sliding surface as follows:
where S=[s 1 s 2 s 3]T, C is a constant matrix.
Then the derivative of sliding surface is

Setting \(\dot{S} = 0\), we get the equivalent control u eq as
Consider the system parameters of A may be unknown, namely K ∗ is unknown, the control law u eq cannot be implemented in practical applications. Therefore, an adaptive version of control algorithm is proposed as

where K is the estimate of K ∗, the last component \(u_{n} = - f\operatorname{sgn} (S)\) is designed to compensate the uncertainties and disturbances f m to guarantee that the sliding mode reaching condition can be always satisfied.
Substituting (16) into (14), we get
where \(\tilde{K} = K - K^{*}\).
Define a Lyapunov function as
where M=M T>0, M is a positive definite matrix, \(\operatorname{tr}[M]\) denoting the trace of M.
Differentiating V 1 with respect to time yields

To make \(\dot{V}_{1} \le0\), we choose the adaptive laws as
Substituting \(\dot{\tilde{K}}{}^{\mathrm{T}}(t)\) into (19)

This implies that the trajectory reaches the sliding surface in finite time and remains on the sliding surface. Furthermore, it can be proved that the controller parametersK will converge to their true values K ∗ if ω 1≠ω 2≠ω 3, \(\lim_{t \to\infty} \tilde{K} \to0\). Then from Assumption 3, we get

The parameters of MEMS gyroscope can be obtained as follows:

4 Adaptive fuzzy sliding mode control design
In conventional sliding mode control, the upper bound f of uncertainties, which includes parameter variations and external disturbances, must be available. However, the bound of the uncertainties is difficult to measure in advance for practical applications. If f is chosen to be too small, it may not compensate the uncertainties and disturbances f m to guarantee reaching condition of sliding mode, so the control system may be unstable. If f is chosen to be too large, the control effort will have large chattering. Therefore, an adaptive fuzzy control method based on the sliding-mode control is proposed to estimate the optimal upper bound of f m in this section.
Replacing f by \(\hat{f}\) in (16), the new version of control algorithm can be obtained:

where \(\hat{f}\) is the estimate of f, \(\hat{f} = \operatorname{diag}[ \hat{f}_{1}\ \hat{f}_{2}\ \hat{f}_{3}]\).
The dynamics of sliding surface (17) can be rewritten as
According to the universal approximation theorem, there exists an optimal fuzzy control system f ∗ such that
where ε is the approximation error and satisfying |ε|<E.
Employing an adaptive fuzzy control system\(\hat{f}\) to approximate f. By using the strategy of singleton fuzzification, product inference and center-average defuzzification, the output of adaptive fuzzy system is
where \(\hat{\boldsymbol{\alpha}} _{i}\) is the estimate of \(\boldsymbol{\alpha} ^{*}_{i}\), which is an adjustable parameter vector. \(\hat{\boldsymbol{\alpha}}_{i} = [\hat{\alpha}_{i1},\hat{\alpha} _{i2},\ldots,\hat{\alpha} _{im}]^{\mathrm{T}}\), ξ i =[ξ i1,ξ i2,…,ξ im ]T.
Define a Lyapunov function as
where M=M T>0, M is a positive definite matrix, \(\operatorname{tr}[M]\) denoting the trace of M, η is a positive constant, \(\tilde{\boldsymbol{\alpha}} _{i} = \hat{\boldsymbol{\alpha}} _{i} - \boldsymbol{\alpha}^{*}_{i}\).
Differentiating V with respect to time yields

To make \(\dot{V} \le0\), the adaptive law is designed as
Then (28) becomes
This implies that \(\dot{V}\) is a negative semi-definite function. \(\dot{V}\) becomes negative semi-definite implying that the trajectory reaches the sliding surface in finite time and remains on the sliding surface and \(S,\tilde{K},\tilde{\boldsymbol{\alpha}}_{i}\) are all bounded.
Furthermore, we have \(\int_{0}^{t} \dot{V}(\tau)\,d\tau = V(t) - V(0) \le- \int_{0}^{t} \sum_{i = 1}^{3} \lambda_{i}| s_{i} | (f_{i} + \varepsilon_{i} - | f_{mi} |)\,d\tau\), that is \(V(t) + \int_{0}^{t} \sum_{i = 1}^{3} \lambda_{i}| s_{i} | (f_{i} + \varepsilon_{i} - | f_{mi} |)\,d\tau\le V(0)\). Since V(0) is bounded and V(t) is nonincreasing bounded function, \(\lim_{t \to \infty} \int_{0}^{t} \sum_{i = 1}^{3} \lambda_{i}| s_{i} | (f_{i} + \varepsilon_{i} - | f_{mi} |) \,d\tau< \infty\). According to the Barbalat lemma, it can be concluded that \(\lim_{t \to\infty} \sum_{i = 1}^{3} \lambda_{i}| s_{i} | (f_{i} + \varepsilon_{i} - | f_{mi} |) = 0\), which means lim t→∞ s i (t)=0. Consequently, e(t) also converges to zero asymptotically.
5 Simulation analysis
According to the proposed adaptive fuzzy sliding mode control approach, the simulation is performed in MATLAB/Simulink software. The control objective is design an adaptive fuzzy sliding mode controller so that the position q can track the reference model q m and the unknown angular velocity can be estimated. The parameters of the MEMS triaxial gyroscope are as follows:

The unknown angular velocity is assumed Ω x =3 rad/s, Ω y =2 rad/s, Ω z =5 rad/s. Through non-dimensional transformation, angular velocity can be obtained:
The reference inputs are x m =sin(6.71t), y m =1.2sin(5.11t), z m =1.5sin(4.17t).
The initial state condition are x 0=[0 0 0 0 0 0], the initial value of K is K(0)=0.95K ∗, the true value of K are
the external disturbance is f m (t)=[10sin(6t)10cos(5t) 10cos(4t)]T. The upper bound of gain is \(f = \operatorname{diag}[ 100\ 100\ 100]\).
In (20) and (29), the parameters are chosen as

The membership functions for sliding surface s are chosen as

Figures 1 and 2 show the position tracking and tracking error of X, Y, and Z axis of the AFSMC system, respectively. It can be found that the position of X, Y, and Z axis can effectively track the desired trajectory in the presence of the external disturbances and the tracking error can converge to zero in very short time. It can be concluded from Fig. 1 and Fig. 2 that the MEMS triaxial gyroscope can maintain the proof mass to oscillate in the X, Y, and Z direction at given frequency and amplitude. Figure 3 depicts that the sliding surface converge to zero asymptotically in a short time, demonstrating the control system will get into sliding surface and remain along with it. Figure 5 plots the adaptation of the controller parameters K. It can be shown that the estimation of controller parameters K converge to their true values with persistent excitation signals.

Position tracking of X, Y, Z axis

Tracking errors of X, Y, Z axis

Convergence of the sliding surface s
Figure 4 draws the adaptation of angular velocity. It can be observed that the angular velocity Ω x , Ω y , Ω z converge to their true values after computation of dimensionless. Figure 6 shows the adaptation of \(\hat{\boldsymbol{\alpha}} _{i}\). It can be found that the adjustable parameter \(\hat{\boldsymbol{\alpha}}_{i}\) converge to constant values. Figure 7 and Fig. 8 compare the control efforts between AFSMC system with adaptive sliding gain using adaptive fuzzy approach and the conventional adaptive sliding control system with fixed sliding gain. It is obvious that the control input in Fig. 7 is better than that of Fig. 8 and the chattering is reduced greatly when using AFSMC to estimate the upper bound of system disturbances.

Adaptation of angular velocity Ω x , Ω y , Ω z

Adaptation of the controller parameters K

Adaptation of \(\hat{\boldsymbol{\alpha}}_{i}\)

Control efforts with AFSMC

Control efforts with fixed gain
6 Conclusion
This paper investigates an adaptive algorithm based the sliding mode control to identify the unknown angular velocity and an AFSMC strategy to estimate the upper bound of the uncertainties and external disturbances. The stability of the closed-loop system can be guaranteed with the proposed AFSMC strategy. The simulation results demonstrate the proposed AFSMC method has better robustness and favorable tracking performance. At the same time, the unknown angular velocity can be estimated correctly when the persistent excitation condition is satisfied and the chattering is reduced greatly with the upper bound estimation of the model uncertainties and external disturbances.
References
Park, R.: Adaptive control strategies for MEMS Gyroscopes. PhD Dissertation, UC Berkeley (2000)
Leland, P.: Adaptive control of a MEMS gyroscope using Lyapunov methods. IEEE Trans. Control Syst. Technol. 14(2), 278–283 (2006)
John, J., Vinay, T.: Novel concept of a single mass adaptively controlled triaxial angular rate sensor. IEEE Sens. J. 6(3), 588–595 (2006)
Batur, C., Sreeramreddy, T.: Sliding mode control of a simulated MEMS gyroscope. ISA Trans. 45(1), 99–108 (2006)
Sung, W., Lee, Y.: On the mode-matched control of MEMS vibratory gyroscope via phase-domain analysis and design. IEEE/ASME Trans. Mechatron. 14(4), 446–455 (2009)
Fei, J.: Robust adaptive vibration tracking control for a MEMS vibratory gyroscope with bound estimation. IET Control Theory Appl. 4(6), 1019–1026 (2010)
Park, S., Horowitz, R., Hong, S., Nam, Y.: Trajectory-switching algorithm for a MEMS gyroscope. IEEE Trans. Instrum. Meas. 56(60), 2561–2569 (2007)
Sadati, N., Ghadami, R.: Adaptive multi-model sliding mode control of robotic manipulators using soft computing. Neurocomputing 71(2), 2702–2710 (2008)
Park, B.S., Yoo, S.J., Park, J.B., Choi, Y.H.: Adaptive neural sliding mode control of nonholonomic wheeled mobile robots with model uncertainty. IEEE Trans. Control Syst. Technol. 17(1), 207–214 (2009)
Lee, M., Choi, Y.: An adaptive neucontroller using RBFN for robot manipulators. IEEE Trans. Ind. Electron. 51(3), 711–717 (2004)
Wang, L.: Adaptive Fuzzy Systems and Control-Design and Stability Analysis. Prentice Hall, New Jersey (1994)
Guo, Y., Woo, P.: An adaptive fuzzy sliding mode controller for robotic manipulators. IEEE Trans. Syst. Man Cybern., Part A, Syst. Hum. 33(2), 149–159 (2004)
Yoo, B., Ham, W.: Adaptive control of robot manipulator using fuzzy compensator. IEEE Trans. Fuzzy Syst. 8(2), 186–199 (2000)
Wai, R.J.: Fuzzy sliding-mode control using adaptive tuning technique. IEEE Trans. Ind. Electron. 54(1), 586–594 (2007)
Wai, R.J., Lin, C.M., Hsu, C.F.: Adaptive fuzzy sliding-mode control for electrical servo drive. Fuzzy Sets Syst. 143(2), 295–310 (2004)
Chen, B., Liu, X.S., Tong, C.: Adaptive fuzzy output tracking control of MIMO nonlinear uncertain systems. IEEE Trans. Fuzzy Syst. 15(2), 287–300 (2007)
Ren, C., Tong, S., Li, Y.: Fuzzy adaptive high-gain-based observer backstepping control for SISO nonlinear systems with dynamical uncertainties. Nonlinear Dyn. 67(2), 941–955 (2012)
Cetin, S., Zergeroglu, E., Sivrioglu, S., Yuksek, I.: A new semiactive nonlinear adaptive controller for structures using MR damper: design and experimental validation. Nonlinear Dyn. 66(4), 731–743 (2011)
Li, T., Wang, D., Chen, N.: Adaptive fuzzy control of uncertain MIMO non-linear systems in block-triangular forms. Nonlinear Dyn. 63(1–2), 105–123 (2011)
Wen, G., Liu, Y.: Adaptive fuzzy-neural tracking control for uncertain nonlinear discrete-time systems in the NARMAX form. Nonlinear Dyn. 66(4), 745–753 (2011)
Acknowledgements
The authors thank to the anonymous reviewers for useful comments that improved the quality of the manuscript. This work is supported by National Science Foundation of China under Grant No. 61074056, The Natural Science Foundation of Jiangsu Province under Grant No. BK2010201, and Scientific Research Foundation for the Returned Overseas Chinese Scholars, State Education Ministry.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Fei, J., Xin, M. An adaptive fuzzy sliding mode controller for MEMS triaxial gyroscope with angular velocity estimation. Nonlinear Dyn 70, 97–109 (2012). https://doi.org/10.1007/s11071-012-0433-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0433-z