
Abstract
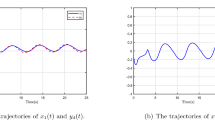
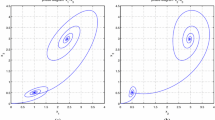
The contribution of this work is to study the control of unknown chaotic systems with input saturation, and the backstepping-based an adaptive fuzzy neural controller (AFNC) is proposed. In many practical dynamic systems, physical input saturation on hardware dictates that the magnitude of the control signal is always constrained. Saturation is a potential problem for actuators of control systems. It often severely limits system performance, giving rise to undesirable inaccuracy or leading instability. To deal with saturation, we construct a new system with the same order as that of the plant. With the error between the control input and saturation input as the input of the constructed system, a number of signals are generated to compensate the effect of saturation. Finally, simulation results show that the AFNC can achieve favorable tracking performances.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Ott, E., Grebogi, C., Yorke, J.A.: Controlling chaos. Phys. Rev. Lett. 64, 1196–1199 (1990)
Raj, S.P., Rajasekar, S.: Migration control in two couple Duffing oscillators. Phys. Rev. E 55, 6237–6240 (1997)
Myneni, K., Barr, T.: New method for the control of fast chaotic oscillations. Phys. Rev. Lett. 83, 2175–2178 (1999)
Yu, Y., Zhang, S.: Controlling uncertain Lü system using backstepping design. Chaos Solitons Fractals 15, 897–902 (2003)
Hua, C., Guan, X., Shi, P.: Adaptive feedback control for a class of chaotic systems. Chaos Solitons Fractals 23, 757–765 (2005)
Soong, C.Y., Huang, W.T., Lin, F.P.: Chaos control on autonomous and non-autonomous systems with various types of genetic algorithm-optimized weak perturbations. Chaos Solitons Fractals 34, 1519–1537 (2007)
Liu, Y.J., Zheng, Y.Q.: Adaptive robust fuzzy control for a class of uncertain chaotic systems. Nonlinear Dyn. 57, 431–439 (2009)
Zhang, H.G., Li, M., Yang, J., Yang, D.D.: Fuzzy model-based robust networked control for a class of nonlinear systems. IEEE Trans. Syst. Man Cybern., Part A, Syst. Hum. 39, 437–447 (2009)
Tong, S.C., Li, Y.M.: Observer-based fuzzy adaptive control for strict-feedback nonlinear systems. Fuzzy Sets Syst. 160, 1749–1764 (2009)
Tong, S.C., Li, C.Y., Li, Y.M.: Fuzzy adaptive observer backstepping control for MIMO nonlinear systems. Fuzzy Sets Syst. 160, 2755–2775 (2009)
Liu, Y.J., Wang, W.: Adaptive fuzzy control for a class of uncertain nonaffine nonlinear systems. Inf. Sci. 177, 3901–3917 (2007)
Liu, Y.J., Tong, S.C., Wang, W.: Adaptive fuzzy output tracking control for a class of uncertain nonlinear systems. Fuzzy Sets Syst. 160, 2727–2754 (2009)
Liu, Y.J., Tong, S.C., Wang, W., Li, Y.M.: Observer-based direct adaptive fuzzy control of uncertain nonlinear systems and its applications. Int. J. Control. Autom. Syst. 7, 681–690 (2009)
Zhou, N., Liu, Y.J., Tong, S.C.: Adaptive fuzzy output feedback control of uncertain nonlinear systems with nonsymmetric dead-zone input. Nonlinear Dyn. 63, 771–778 (2011)
Liu, Y.J., Tong, S.C., Li, T.S.: Observer-based adaptive fuzzy tracking control for a class of uncertain nonlinear MIMO systems. Fuzzy Sets Syst. 164, 25–44 (2011)
Narendra, K.S., Parthasarathy, K.: Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Netw. 1, 4–27 (1990)
Hunt, K.J., Sbarbaro, D., Zbikowski, R., Gawthrop, P.J.: Neural networks for control: a survey. Automatica 28, 1083–1112 (1992)
Liu, Y.J., Chen, C.L.P., Wen, G.X., Tong, S.C.: Adaptive neural output feedback tracking control for a class of uncertain discrete-time nonlinear systems. IEEE Trans. Neural Netw. 22, 1162–1167 (2011)
Liu, Y.J., Tong, S.C., Wang, D., Li, T.S., Chen, C.L.P.: Adaptive neural output feedback controller design with reduced-order observer for a class of uncertain nonlinear siso systems. IEEE Trans. Neural Netw. (2011). doi:10.1109/TNN.2011.2159865
Wang, L.X.: Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Prentice-Hall, Englewood Cliffs (1994)
Yu, W., Li, X.: Fuzzy identification using fuzzy neural networks with stable learning algorithms. IEEE Trans. Fuzzy Syst. 12, 411–420 (2004)
Jang, J.S.: ANFIS: adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 23, 665–685 (1993)
Lin, C.T., Lee, C.S.G.: Neural Fuzzy Systems. Prentice-Hall, Englewood Cliffs (1996)
Chen, B., Liu, X., Tong, S.: Adaptive fuzzy approach to control unified chaotic systems. Chaos Solitons Fractals 34, 1180–1187 (2007)
Kim, J.H., Hyun, C.H., Kim, E., Park, M.: Adaptive synchronization of uncertain chaotic systems based on T-S fuzzy model. IEEE Trans. Fuzzy Syst. 15, 359–369 (2007)
Wang, X., Meng, J.: Observer-based adaptive fuzzy synchronization for hyperchaotic systems. Chaos 18, 033102-5 (2008)
Roopaei, M., Jahromi, M.Z., Jafari, S.: Adaptive gain fuzzy sliding mode control for the synchronization of nonlinear chaotic gyros. Chaos 19, 013125-9 (2009)
Liu, Y.J., Wang, W., Tong, S.C., Liu, Y.S.: Robust adaptive tracking control for nonlinear systems based on bounds of fuzzy approximation parameters. IEEE Trans. Syst. Man Cybern., Part A, Syst. Hum. 40, 170–184 (2010)
Lin, D., Wang, X.: Observer-based decentralized fuzzy neural sliding mode control for interconnected unknown chaotic systems via network structure adaptation. Fuzzy Sets Syst. 161, 2066–2080 (2010)
Kapoor, N., Teel, A.R., Daoutidis, P.: An anti-windup design for linear systems with input saturation. Automatica 34, 559–574 (1998)
Bemporad, A., Teel, A.R., Zaccarian, L.: Anti-windup synthesis via sampled-data piecewise affine optimal control. Automatica 40, 549–562 (2004)
Fliegner, T., Logemann, H., Ryan, E.P.: Low-gain integral control of continuous time linear systems subject to input and output nonlinearities. Automatica 39, 455–462 (2003)
Grognard, F., Sepulchre, R., Bastin, G.: Improving the performance of low-gain designs for bounded control of linear systems. Automatica 38, 1777–1782 (2002)
Chaoui, F.Z., Giri, F., Msaad, M.: Asymptotic stabilization of linear plants in the presence of input and output saturations. Automatica 37, 37–42 (2001)
Karason, S.P., Annaswamy, A.M.: Adaptive control in the presence of input constraints. IEEE Trans. Autom. Control 39, 2325–2330 (1994)
Nicolao, G.D., Scattolini, R., Sala, G.: An adaptive predictive regulator with input saturations. Automatica 32, 597–601 (1996)
Chaoui, F.Z., Giri, F., Msaad, M.: Adaotive control of input-constrained tyoe-1 plants stabilization and tracking. Automatica 37, 197–203 (2001)
Jagannathan, S., Hameed, M.: Adaptive force-banlancing control of MEMS gyroscope with actuator limits. In: Proceedings of American Control Conference, Boston, Massachusetts, pp. 1862–1867 (2004)
Zhou, J., Wen, C.: Adaptive backstepping control of uncertain systems. In: LNCS, vol. 372, pp. 189–197. Springer, Berlin (2008)
Krstic, M., Kanellakopoulos, I., Kokotovic, P.V.: Nonlinear and Adaptive Control Design. Wiley, New York (1995)
Jamshidi, M., Vadiee, N., Ress, T.J.: Fuzzy Logic and Control. Prentice-Hall, Englewood Cliffs (1993)
Leu, Y.G., Lee, T.T., Wang, W.Y.: On-line tuning of fuzzy-neural network for adaptive control of nonlinear dynamical systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 27, 1034–1043 (1997)
Lin, C.T., Lee, C.S.G.: Neural-network-based fuzzy logic control and decision system. IEEE Trans. Comput. 40, 1320–1336 (1991)
Chen, Y.C., Teng, C.C.: A model reference control structure using a fuzzy neural network. Fuzzy Sets Syst. 73, 291–312 (1995)
Wang, L.X.: Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1, 146–155 (1993)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lin, D., Wang, X. & Yao, Y. Fuzzy neural adaptive tracking control of unknown chaotic systems with input saturation. Nonlinear Dyn 67, 2889–2897 (2012). https://doi.org/10.1007/s11071-011-0196-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-011-0196-y