
Abstract
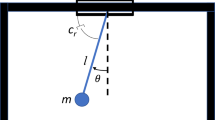
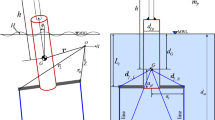
Time-delay feedback control of container cranes is robustly stable and insensitive to initial conditions for most of the linearly stable region. To better understand this robustness and any limitations of the technique, we undertake a nonlinear analysis of the system. To this end, we develop a nonlinear model of the crane system by modeling the crane-hoist-payload assembly as a double pendulum. Then, we derive a linear approximation specific to this model. Finally, we derive a cubic model of the dynamics for nonlinear analysis. Using linear analysis, we determine the gain and time delay factors for stabilizing controllers. Also, we show that the controller undergoes a Hopf bifurcation at the linear stability boundary. Using the method of multiple scales on the cubic model, we determine the normal form of the Hopf bifurcation. We then show that for practical operating ranges, the controller undergoes a supercritical bifurcation that helps explain the robustness of the controller.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Abdel-Rahman, E.M., Nayfeh, A.H., Masoud, Z.N.: Dynamics and control of cranes: A review. J. Vib. Control 9, 863–908 (2003)
Golafshani, A.R., Aplevich, J.D.: Computation of time-optimal trajectories for tower cranes. In: Proceedings of the IEEE Conference on Control Applications, pp. 1134–1139 (1995)
Alsop, C.F., Forster, G.A., Holmes, F.R.: Ore unloader automation—a feasibility study. In: Proceedings of IFAC on Systems Engineering for Control Systems, pp. 295–305 (1965)
Carbon, L.: Automation of grab cranes. Siemens Rev. XLIII 2, 80–85 (1976)
Jones, J.F., Petterson, B.J.: Oscillation damped movement of suspended objects. In: Proceedings of the IEEE International Conference on Robotics and Automation, Philadelphia, PA, vol. 2, pp. 956–962 (1988)
Noakes, M.W., Jansen, J.F.: Shaping inputs to reduce vibration for suspended payloads. In: Proceedings of the 4th ANS Topical Meeting on Robotics and Remote Systems, Albuquerque, NM, pp. 141–150 (1990)
Noakes, M.W., Petterson, B.J., Werner, J.C.: An application of oscillation damped motion for suspended payloads to the advanced integrated maintenance system. In: Proceedings of the 38th Conference on Remote Systems Technology, San Francisco, CA, vol. 1, pp. 63–68 (1990)
Noakes, M.W., Jansen, J.F.: Generalized inputs for damped-vibration control of suspended payloads. Robot. Auton. Syst. 10(2), 199–205 (1992)
Zinober, A.S., Fuller, A.T.: The sensitivity of normally time-optimal control of systems to parameter variation. Int. J. Control 17, 673–703 (1973)
Virkkunen, J., Marttinen, A.: Computer control of a loading bridge. In: Proceedings of the IEE International Conference: Control’88, Oxford, UK, pp. 484–488 (1988)
Yoon, J.S., Park, B.S., Lee, J., Park, H.S.: Various control schemes for implementation of the anti-swing crane. In: Proceedings of the ANS 6th Topical Meeting on Robotics and Remote Systems, Monterey, CA, pp. 472–479 (1995)
Singhose, W.E., Porter, L.J., Seering, W.P.: Input shaped control of a planar crane with hoisting. In: Proceedings of the American Control Conference, Albuquerque, NM, pp. 97–100 (1997)
Nayfeh, N.A., Masoud, Z.N., Baumann, W.T.: A comparison of three feedback controllers for container cranes. In: ASME IDETC (2005)
Yong-Seok, A., Hyungbo, S., Hidemasa, Y., Naoki, F., Hideshi, K., Seung-Ki, S.: A new vision-sensoreless anti-sway control system for container cranes. In: IEEE Industry Applications Conference, Salt Lake City, UT, vol. 1, pp. 262–269 (2003)
Yong-Seok, A., Keum-Shik, H., Seung-Ki, S.: Anti-sway control of container cranes: inclinometer, observer, and state feedback. Int. J. Control Autom. Syst. 2(4), 435–449
DeSantis, R.M., Krau, S.: Bang-bang motion of a Cartesian crane. Robotica 12, 174–177 (1994)
Henry, R.J., Masoud, Z.N., Nayfeh, A.H., Mook, D.T.: Cargo pendulation reduction on ship-mounted cranes via boom-luff angle actuation. J. Vib. Control 7, 1253–1264 (2001)
Masoud, Z.N., Nayfeh, A.H.: Sway reduction on container cranes using delayed feedback controller. Nonlinear Dyn. 34(3–4), 347–358 (2003)
Nayfeh, N.A.: Adaptation of delayed position feedback to the reduction of sway of container cranes. Master’s thesis, Virginia Polytechnic Institute and State University (2002)
Nayfeh, A.H., Chin, C.M., Pratt, J.: Perturbation methods in nonlinear dynamics–applications to machining dynamics. J. Manuf. Sci. Eng. 119, 485–493 (1997)
Stone, E., Campbell, S.: Stability and bifurcation analysis of a nonlinear dde model for drilling. J. Nonlinear Sci. 14(1), 27–57 (2004)
Nayfeh, A.H.: Method of Normal Forms. Wiley–Interscience, New York (1993)
Masoud, Z.N., Nayfeh, A.H., Al-Mousa, A.: Delayed position-feedback controller for the reduction of payload pendulations of rotary cranes. J. Vib. Control 9(1), 257–277 (2003)
Hartman, P.: A lemma in the theory of structural stability of differential equations. In: Proceedings of the American Mathematical Society, vol. 11, pp. 610–620 (1960)
Grobman, D.M.: Homeomorphisms of systems of differential equations. Dokl. Akad. Nauk SSSR 128 (1959)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Nayfeh, N.A., Baumann, W.T. Nonlinear analysis of time-delay position feedback control of container cranes. Nonlinear Dyn 53, 75–88 (2008). https://doi.org/10.1007/s11071-007-9297-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-007-9297-z