
Abstract
In order to overcome the shortage that point-based data acquisition techniques cannot retrieve the whole basin subsidence caused by underground mining, and to avoid complex splicing of terrestrial 3D laser scanner (TLS) point cloud data and the errors caused by such splicing, GPS/TLS combined technology is employed for mining subsidence monitoring. The basic idea of the monitoring technology is put forward. In this article, an application of the method to a coal mining area in China is presented. Support vector machine (SVM) model for GPS level conversion in the mining area is established, and a comparative analysis of SVM, BP neural network and polynomial established local quasi-geoid in the mining area is conducted. Ground surface digital elevation model (DEM) of the mining area is established by using TLS point cloud data, and the ground surface dynamic subsidence basin is obtained through a subtraction of two DEMs. The results indicate that the quasi-geoid established by using SVM model features a relatively high level of stability and accuracy and that the established mining surface DEM and subsidence basin can provide the fundamental data for the reconstruction of ecological environment in the mining area. GPS/TLS combined monitoring technology is a new monitoring technology, which entangles the advantages of both GPS and TLS and could offset their disadvantages, thus obtaining complementary advantages. According to analysis on its application in the mining area, we conclude that the technology is feasible and has a great application prospect for the mining area purposes.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The subsidence induced by coal mining is a complex spatio-temporal process. Obtaining data through monitoring mining subsidence provides a basis for studying the complex process. With the development of the surveying and mapping technology, the mining subsidence monitoring technology has developed from traditional separated leveling and plane coordinate observations (He et al. 1991) to the total station and GPS (Liu et al. 2012; Wang et al. 2011; Xu et al. 2006), and then to terrestrial 3D laser scanner (TLS) observation. Measurement taken with the traditional observation technology uses the “point-based” method, which features a low efficiency and heavy workload. This article puts forward the combined technology of GPS/TLS for the purposes of monitoring the surface subsidence originated by underground mining.
Satellite positioning system (GPS) is a technology conducting point measurement using artificial earth satellites (Xu et al. 2006). With its advantages including all-weather, automatic, no visibility needed between stations and simultaneous measurement of three-dimensional coordinates of points, it has been widely used in various fields and has achieved satisfactory results in mining subsidence monitoring (Liu et al. 2012; Wang et al. 2011; Zheng et al. 2003; Han et al. 2002b; Han et al. 2002a; Zhang et al. 2000; Gao and Yu 1999). Still, there are some ongoing problems: data obtained by GPS are point-based, and information of the whole subsidence basin in the mining area cannot be measured, which would make it difficult to play an important role in analyzing surface movement and deformation of the whole mining subsidence basin.
TLS technology is a new measurement technique developed in recent years, and the technology can quickly obtain “plane” information and becomes one of the important means to obtain the spatial data (Zhang 2008). Specifically, it can achieve the whole basin monitoring of a surface subsidence due to coal mining and overcome the defects of the point-based observation mode. However, TLS has a defect that the point cloud data between stations need to be spliced to a unified coordinate system; though by using current registration method (Sheng et al. 2010; Shi et al. 2009; Zheng et al. 2008; Shi et al. 2008; Zheng 2005), problems in stations matching have been solved to some extent, yet again such problems arises: (1) registration algorithm is complex and difficult to calculate; (2) no matter how good the registration method is, it will cause errors; and (3) in the deformation monitoring field, the matching error may affect the result seriously. Based on the above problems and complementarities of GPS and TLS, we propose the combined usage of GPS and TLS for mining subsidence monitoring.
2 SVM model for GPS level conversion
Elevation measured by GPS is the geodetic high, and normal height is commonly used in China (Xu et al. 2006). Hence, GPS level conversion is needed, and the key of conversion is determined by abnormal elevation. The commonly used methods nowadays are the direct method and the fitting method, the former needs gravity data and terrain data, its application is limited, while the latter is relatively simple, its procedures are carried out as following: firstly, measure geodetic height of control points by using GPS and obtain the normal height using leveling, then fit the local quasi-geoid, and then calculate the height anomaly of these points to be measured through interpolation, finally calculate the normal height. Commonly used fitting methods include polynomial fitting (Gao and Xu 2004; Hu et al. 2002) and BP neural network simulation (Wang et al. 2009; Yang et al. 1999). This paper uses support vector machine (SVM) (Wu et al. 2004) in the local quasi-geoid fitting.
The SVM, which possesses good model generalization ability, is a new machine learning algorithm and can conduct the function fitting very well. Application the SVM model for GPS height conversion is to determine the functional relationship between the height anomaly ξ of the observation points and their plane coordinate X, \(\xi = f(X).\)
In the function approximation, for data sets {x i , y i }, i = 1,2,…,n, x i ∈R d , y i ∈R, if a linear function of \(f\left( x \right) = wx + b\)is used to conduct fitting, the fitting precision is ε, and then use slack factor \(\xi_{i} \ge 0\)and \(\zeta_{i}^{*} \ge 0\); according to the structural risk minimization (SRM) criterion, the fitting function f(x) should minimize the optimization goal, i.e., Eq. (2) while at the same time meeting the constraint Eq. (1).
where C > 0 is the penalty factors on cross-border sample points, reflecting the complexity of the algorithm and compromise degree of prediction accuracy.
By using the Lagrange optimization method, the dual problem of the optimization goals can be presented as Lagrange optimization problem, under the condition of \(\mathop \sum \limits_{i = 1}^{n} \left( {\alpha_{i}^{*} + \alpha_{i} } \right) = 0, \, 0 \le \alpha_{i}, \alpha_{i}^{*} \le C, \, i = 1,2, \ldots ,n\), maximizes the objective function for the Lagrange factor \(\alpha_{i}\), \(\alpha_{i}^{*}\).
An optimal \(\alpha_{i}^{*} ,\alpha_{i}\)(i = 1,2,…,n)is gotten, b* is obtained by using the given sample and based on f(x) = wx + b, and obtain the regression function:
For a nonlinear function fitting, linear approximation after a nonlinear transformation \(\phi \left( x \right)\)can be achieved by using an appropriate kernel function k(x i , x j ), and then the fitting function becomes:
where \(k\left( {x,x_{i} } \right) = \phi^{T} (x_{i} ) \cdot \phi (x)\), referred to as an inner product kernel; kernel functions commonly used in SVM mainly include polynomial kernel functions, the radial basis function (RBF), and Sigmoid kernel function.
3 Methods of TLS for mining subsidence and observation stations
3.1 Methods of TLS for mining subsidence
Figure 1 is a schematic diagram of TLS used for monitoring subsidence in mining process. When coal seam is excavated toward position 1, observe the ground surface above the coal face using TLS, and then establish digital elevation model (DEM) in the mining subsidence area through scanning data (hereinafter referred to as DEM1). When coal seam is excavated toward position 2, scans the same surface with TLS again, so as to renew and obtain DEM (hereinafter referred to as DME2). By deducting DEM2 from DEM1, we can get the ground surface subsidence during period between two mining processes (position 1 and position 2), i.e., the measured dynamic subsidence basin.

Sketch of basic philosophy for TLS used in subsidence monitoring
3.2 Laying out of observation stations
Procedures for laying out GPS/TLS observation station mainly include (1) determining the subsidence basin boundary; (2) number, density and distribution of monitoring positions.
(1) Determination method for subsidence basin range: Taking a position subsiding by 10 mm as a boundary, we determine the outer boundary of the mobile basin according to angle of critical deformation, for further details please see Fig. 2. Also, range of mining subsidence can be predicted by using an integral probability method (He et al. 1991).
(2) Number, density and distribution of monitoring positions: Monitoring position is generally distributed in the basin, as shown in Fig. 2a ABCD, the internal grid points comprehend design scanning and monitoring positions, and the distances between positions are shown in Fig. 2d. Number of monitoring positions N can be calculated with the following equation:
where r is a scanning radius on each scan position (Fig. 2d), which can be determined according to the scanner model, unit: m. AB and CD are, respectively, strike and dip length of monitoring positions (see Fig. 2a), unit: m.

Determination of subsidence basin range and distribution of monitoring positions
3.3 Steps for observation
The steps for monitoring observation stations using GPS/TLS include
(1) Firstly, we measure WGS84 3D coordinate of monitoring points by using GPS and convert them to a three-dimensional coordinate system of mining area through leveling and plane coordinates system transformation.
(2) Taking the monitoring points as instrument coordinates, we scan the mining area surface with TLS; point cloud data obtained are related to the instrument coordinates; when instrument coordinates (i.e., the coordinates of monitoring points) are known, the point cloud data shall be in the same coordinate system, so as to avoid splicing later.
4 Technical flow of monitoring mining subsidence with GPS/TLS
Figure 3 shows technical flow of monitoring mining subsidence with GSP/TLS combined technology. Firstly, the quasi-geoid in mining subsidence area is determined by using GPS and the conventional leveling and obtains a high-precision normal height of positions to be measured; through the plane coordinate transformation model, the GPS plane coordinates are transformed to a plane coordinates suitable for the mining area, so as to obtain high-precision 3D coordinates of the monitoring points. When scanning monitoring positions, input the data into TLS system based on the obtained 3D coordinate, that is, set the point cloud data into a unified coordinate system, so as to avoid problem in later matching of point cloud data. Based on the rich ground point cloud data obtained by TLS, a DEM in subsidence area during mining could be established; according to the multi-period scanned data, DEM of the subsidence area can be regularly updated and subsidence basin can be obtained by subtracting one DEM with another DEM, which can provide the reliable basic data for the land reclamation recovery, environment reconstruction and ecological recovery. Moreover, the normal height transformed by GPS and subsidence data obtained from interpolated point cloud data (DEM data) can be used for calculating subsidence parameters (due to space constraints, parameters of this part are not given in this paper), which can be used for disaster forecast services for the mining subsidence.

Technical flow of monitoring mining subsidence with GSP/TLS combined technology
5 Engineering application analysis
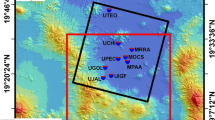
The monitoring technology is tested in the coal face of a mining area in Hebei Province of China; the basic specification of such working face is as follows: length of working face 700 m; width of working face 139 m; average mining depth 540 m; average elevation of ground surface above working face 147 m; average mining thickness 5 m; average mining speed 1.3 m/d; seam dip 12°. Monitor with Trimble GX200 type TLS is used, and scanning radius of a single station is set as 40 m; according to the formula (6), 28 monitoring points are set in ground surface above the coal face, which are evenly distributed on the surface above the coal face. Totally 15 control points are collected in the mining area (as shown in Fig. 4), and the 3D coordinate of such control points are known as Beijing 54 Gauss coordinate system, Yellow Sea height system, and national third-order level data. During the first comprehensive observation, the WGS84 coordinates of all 43 monitoring points (15 control points + 28 monitoring points) are observed by using the GPS–RTK technology, carried out monitoring monthly from November 2009 to March 2010 in accordance with the observation, totally 4 times, and gained rich ground point cloud data.

Schematic diagram of distribution of control points in the mining area
5.1 Establishment of a local quasi-geoid in mining area
Ten control points in the mining area that were uniformly distributed (see control points with five-point star in Fig. 4) were selected as a learning set for training purposes. Other 5 control points (see control points with triangle in Fig. 4) were selected as the detection test set. For comparison analysis, local quasi-geoid fitting was performed in the mining area by using 3 kinds of models, namely SVM, polynomial, and BP neural network.
Based on the SVM model converted from GPS level in mining area, RBF (Gaussian radial basis function)is chosen as the kernel function, with kernel function factor σ 2 = 9, the penalty factor C = 1000, and insensitive loss function parameter ε = 0.0001.
Three-layer BP neural network models including input layer, hidden layer, and output layer are adopted, wherein there are two nodes on the input layer, i.e., the plane coordinate (x, y) of a point; there are 5 neurons on the hidden layer; and one node on the output layer, namely the height anomaly \(\xi\). Calculations are performed using the MATLAB software.
Before the data fitting, both SVM and BP neural network need to be normalized by inputting and outputting data to the interval [0, 1], so that learning and training can be carried out by using the foresaid algorithm. Normalized processing functions are as follows:
where in X stands for the input or output value; X max , X min stands for maximum, minimum value of the input or output data; \(X^{*}\)is the normalized value.
With the polynomial curve fitting (Xu et al. 2006), elevation anomaly ξ and plane coordinate (x, y) have the following relationship: \(\xi = f\left( {x, y} \right) + \varepsilon\), where \(f\left( {x,y} \right) = a_{0} + a_{1} x + a_{2} y + a_{3} x^{2} + a_{4} y^{2} + a_{5} xy\)is the trend of ξ and ε stands for error. It is written in matrix form: \(\xi = XB + \varepsilon\), when \(\mathop \sum \nolimits \varepsilon^{2} = \hbox{min}\), \(a_{i}\)can be obtained, and it is substituted into the formula to compute \(\xi\)and obtain the normal height.
Evaluation index adopts the internal and external accord accuracy, and the calculation formula is as follows: \(\mu = \pm \sqrt {\left[ {VV} \right]/(n - 1)}\), wherein \(V = \xi_{i} - \xi_{i}^{*}\)height anomaly fitting residuals.
Figure 5 shows the fitting residuals of different models, and fluctuations amplitude of SVM is the smallest where the maximum fitting error is 1.43 cm; the second one is the BP neural network with the maximum fitting error of 1.44 cm; and the biggest one is the polynomial with the maximum fitting error of 1.54 cm. Figure 6 shows the predicted error of different models, the fluctuation amplitude of SVM is the most stable, followed by the BP neural network, and the polynomial. From fitting precision given in Table 1, both internal and external accord accuracy values are higher than the polynomial and BP neural network ones.

Comparison of fitting residue of different models

Comparison of predicted residue of different models
Therefore, it is the GPS level conversion model, which is relatively stable and accurate. Geodetic height data of 43 scanned stations calculated by means of the SVM model are selected in this article.
5.2 Transformation of plane coordinates
The plane coordinate transformation model in the mining area can be obtained by referring to the reference Xu et al. (2006) and Gao and Yu (1999). Using GPS coordinates and BJ54 coordinates of 15 control points for benchmark, we can transform from a WGS84 system to a BJ54 system coordinate, where transformation can be realized according to the plane coordinate transformation model. Then, the BJ54 coordinates of the remaining 28 monitoring points can be obtained.
With the normal height of points calculated as such, high-precision 3D coordinates of each scanning and monitoring points can be obtained. When scanning, coordinates of monitoring points are input to TLS as the instrument coordinates; then, each scanning positions is integrated into a unified BJ54 coordinate system, and the relationship between the scanning positions and monitoring points is established, so that complex splicing process and stitching error in a later phase can be avoided. The point cloud data obtained by scanning can be used to update the existing DEM or establish DEM in the mining area, as well as to provide fundamental data for land reclamation and ecological environment recovery.
5.3 DEM establishment
From November 2009 to March 2010, a total of four scanning sessions have been carried out on ground surface above the working face; before scanning, GPS–RTK observation was performed for 28 monitoring points, so as to obtain high-precision 3D coordinates through conversion, which can be regarded as connection data among monitoring points. No original DEM data were provided in the ore mining area, so DEM1 of the ground surface in the mining area was obtained based on the point cloud scanned first time (November 8, 2009) as shown in Fig. 7a, and then DEM2 of the ground surface in the mining area was established by using a point cloud data obtained the last time (March 3, 2010) as shown in Fig. 7b; by subtracting DEMs (DEM2-DEM1), dynamic subsidence basin can be obtained from November 2009 to March 2010 as shown in Fig. 7c.

Establishment of DEM and dynamic subsidence basin. a November 8, 2009 ground surface DEM1/unit: m; b March 10, 2010 ground surface DEM2/unit m; c Dynamic subsidence basin between two scanning periods (2009.11.08–2010.03.10)/unit mm
6 Illustrations
Above mentioned are core elements and technical flows of GPS/TLS combined monitoring technology for coal mining subsidence with a mining area of Hebei Province in China as an example; however, the technology was also tested in Yanzhou mining area of Shandong Province in China. Figure 8 shows point cloud data of twice scanning in Yanzhou mining area. Figure 9 is dynamic subsidence basin between the two scanning periods (January 31, 2008–February 13, 2008). The result shows that the technology is feasible.

Point cloud data and cloud superposition of scanning in Yanzhou mining area. a Point cloud of first scanning on January 31, 2008; b Point cloud of second scanning on February 13, 2008; c Cloud superposition of twice scanning

Dynamic subsidence basin in Yanzhou coal mining area between two scanning periods (January 31, 2008–February 13, 2008)/unit m
7 Conclusions
The GPS/TLS combined monitoring technology for mining subsidence presents a new monitoring technology, integrating the advantages of both GPS and TLS. GPS provides coordinate system connection for TLS scanning measurement, which can overcome the problem of the point cloud data registration; TLS can access to subsidence basin data in the mining area, which offsets shortcoming of “point”-shaped observation of GPS and forms some complementary advantages, so that its application in the mining area is feasible and has great application prospects.
Through a comparative analysis of the existing engineering examples in Hebei Province in China by using SVM, BP neural network and polynomial, local quasi-geoid can be established in the mining area, and the established SVM model is relatively stable and of high precision.
By using the point cloud data, ground surface DEM in the mining area can be established and the surface subsidence basin can be obtained during the two scanning periods by subtracting DEMs from one another; therefore, the fundamental data for the reconstruction of ecological environment in the mining area can be provided.
References
Gao W, Xu SQ (2004) Subregional fitting and transforming GPS height into normal height. Geomat Inf Sci Wuhan Univ 29(10):908–911 (in Chinese)
Gao JX, Yu XX (1999) Study on Robust Estimation Model for Coordinate Transformation of GPS Network in Mining Areas. J China Univ Ming Technol 28(02):99–103 (in Chinese)
Han BM, Ou JK, Chai YJ, Lu XS (2002a) Method for processing data observed from GPS for subsidence surveying in mining area. Chin J Noferrous Met 12(05):1035–1039 (in Chinese)
Han BM, Ou JK, Cheng S, Liu GY (2002b) A new GPS single epoch phase processing algorithm and its application in mining subsidence surveying. J China Coal Soc 27(05):479–482 (in Chinese)
He GQ, Yang L, Ling GT, Jia CF, Hong D (1991) Mining subsidence sciences. China University of Mining and Technology Press, Xuzhou (in Chinese)
Hu WS, Hua XS, Zhang ZW (2002) Conversion of GPS height in plainness area by the CF & NNM method. Acta Geodaetica et Cartographica Sinica 31(02):128–133 (in Chinese)
Liu C, Zhou F, Gao J, Wang J (2012) Some problems of GPS RTK technique application to mining subsidence monitoring. Int J Min Sci Technol 22(2):223–228. doi:10.1016/j.ijmst.2012.03.001
Sheng YH, Zhang K, Wang YB (2010) Seamless multi-station merging of terrestrial laser scanned 3D point clouds. J China Univ Ming Technol 39(02):233–237 (in Chinese)
Shi GG, Wang F, Cheng XJ, Li QL (2008) Optimal station position number for terrestrial laser scanning multi-view point cloud registration. J Dalian Marit Univ 34(03):64–66 (in Chinese)
Shi GG, Cheng XJ, Guan YL, Li QL (2009) Best distance of terrestrial 3D laser scanning point cloud registration. J Jiangsu Univ (Nat Sci Edition) 30(02):197–200 (in Chinese)
Wang SW, Li F, ke BG, Wang WR (2009) Conversion of GPS height based on BP ANNS. Geomat Inf Sci Wuhan Univ 34(10):1190–1193 (in Chinese)
Wang J, Peng XG, Xu CH (2011) Coal mining GPS subsidence monitoring technology and its application. Min Sci Technol (China) 21(4):463–467. doi:10.1016/j.mstc.2011.06.001
Wu ZF, Gong P, Gao F, Wang N (2004) GPS quasi geoid fitting based on support vector machine technology. Acta Geodaetica et Cartographica Sinica 33(04):303–306 (in Chinese)
Xu SQ, Zhang HH, Yang ZQ (2006) Principle and application of GPS measurements. Wuhan university press, WuHan China
Yang MQ, Jin F, Zhu DC, Cheng XC (1999) Conversion of GPS height by artificial neural network method. Acta Geodaetica et Cartographica Sinica 28(04):301–307 (in Chinese)
Zhang S (2008) The study of fast acquiring of mining subsidence prediction parameters using 3D laser scanner. China University of Mining and Technology Press, Xuzhou (in Chinese)
Zhang HH, Li JZ, Yu XX, Lu WC (2000) Data process model for GPS deformation monitoring network. J China Univ Ming Technol 29(04):423–427 (in Chinese)
Zheng DH (2005) Three-dimensional laser scanning image combination model and experimental analysis. J Hohai Univ (Nat Sci) 33(04):466–471 (in Chinese)
Zheng ZY, Huang C, Lu XS, Zhang FP (2003) Wavelet analysis of GPS dynamic observations of stratigraphic displacement in mining area. J Geodesy Geodyn 23(03):107–111 (in Chinese)
Zheng DH, Yue DJ, Yue JP (2008) Geometric feature constraint based algorithm for building scanning point cloud registration. Acta Geodaetica et Cartographica Sinica 37(04):464–468 (in Chinese)
Acknowledgments
The research has been supported by a project funded by the Priority Academic Program Development of the Jiangsu Higher Education Institutions (PAPD, approval number: SA1202) and the Graduate Scientific Research Innovation Program of Jiangsu Province Ordinary University (No. CXLX13_945).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhou, D., Wu, K., Chen, R. et al. GPS/terrestrial 3D laser scanner combined monitoring technology for coal mining subsidence: a case study of a coal mining area in Hebei, China. Nat Hazards 70, 1197–1208 (2014). https://doi.org/10.1007/s11069-013-0868-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-013-0868-7