
Abstract
The shaking tables that are used in earthquake engineering are normally driven by hydraulic actuators, which require high maintenance and operation costs. In some studies, when it is only desirable to conduct small-scaled model tests, a pneumatic shaking table can be considered as an alternative to a hydraulic shaking table. This paper describes the design, development, calibration, and performance of a pneumatic shaking table system. It was proved that the pneumatic shaking table can offer satisfactory performances. Using the pneumatic shaking table, a liquefaction test on saturated sand was conducted. During liquefaction, both the stiffness and acceleration response of the ground greatly decreased. In comparison to the sharp increase in excess pore water pressure (EPWP) when liquefaction started, the dissipation process lasted for a much longer time period.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Shaking tables are used extensively for seismic research in earthquake geotechnical engineering. Researchers employ shaking tables to produce simulated ground motions. Tested specimens, such as soil or structural models, are shaken on the platforms of the shaking tables. Thus, the soil behaviors under the seismic loading conditions can be observed and analyzed (e.g., the recent works by Kim et al. 2005; Motamed and Towhata 2010; Giri and Sengupta 2010; Huang et al. 2012).
Shaking tables used in earthquake geotechnical engineering are normally driven by hydraulic actuators. The hydraulic actuator uses a pressurized hydraulic liquid, which is typically oil, for power transmission. Because the hydraulic actuator can apply powerful loading to the shaking table platform, the size and payload of a hydraulic shaking table can be very large. For example, the world’s largest shaking table, the E-defense shaking table in Japan, has a platform size of 15 × 20 m, and the payload reaches 1,200 tonf (Sato and Inoue 2004).
Most of the hydraulic actuators used for shaking tables require high maintenance and operation costs (Ogawa et al. 2001). However, in some research, when it is only desirable to conduct small-scaled model tests, a pneumatic shaking table can be considered as an alternative to a hydraulic shaking table. A pneumatic actuator system is much simpler than a complex hydraulic actuator system and requires almost no maintenance costs. Pneumatic actuators are widely used in mechanical engineering and manufacturing industries; however, their application in shaking table devices in earthquake geotechnical engineering has never been reported. This paper attempted to develop the first pneumatic shaking table device that can offer satisfactory performances. Certainly, because air has a much greater compressibility than oil as a power transmission medium, the loading capacity of the pneumatic actuator is smaller than the hydraulic actuator. Hence, the size and payload of the pneumatic shaking table are limited when compared to that of the hydraulic shaking table. However, when the response and failure mechanism of soil structure, such as the liquefaction failure of a sandy ground, are of importance, a small-scaled shaking table test is sufficient. Considering these factors, a pneumatic shaking table was designed and fabricated.
2 Pneumatic shaking table
Figure 1 displays the configuration of the developed pneumatic shaking table device. The device consists of a pneumatic actuator system, a table platform, a laminar shear box, and a control system.

The configuration of the shaking table device
2.1 Pneumatic actuator system
Figure 2 presents the schematic illustration of the pneumatic actuator system. An air compressor is used to fill pressurized air (0.8–1.2 MPa) into two pressure tanks. Each tank has a volume of 260 L. The pressurized air in these two tanks is used as the power source for the pneumatic shaking table system. The pressure tanks are connected with two main cylinders and two damping cylinders through a set of regulators and boosters. The cylinders are symmetrically installed below the table platform. Before shaking, the air pressures in the main and damping cylinders are adjusted to a specific value (generally 0.4 MPa) by the regulators and boosters, and the table platform is maintained in a balanced state. When shaking initiates, the control system sends command signals to the boosters and the two control valves. According to the command signals, the boosters can control the pressure and the airflow rate that flows into the main cylinders. The control valves are slide valves that can control the direction of the airflow in the main cylinders. As shown in Fig. 3, if the spool in the control valve moves rightward, the pressurized air will flow into the left chamber of the main cylinder, and the air in the right chamber will flow out. The table platform will then be driven rightward by the pistol. Similarly, if the spool moves leftward, the air will flow into the right chamber and flow out from the left chamber, pushing the table platform to move leftward. The dissipated air will flow into a muffler to reduce the exhaust noise. The pressurized air in the damping cylinders does not dissipate during shaking; it serves as a cushioned material for table platform movements.

A schematic illustration of the pneumatic actuator system

A detailed schematic of the control valve and the main cylinder. a Moving rightward, b moving leftward
2.2 Table platform
The table platform is a stainless regular plate with dimensions of 1.6 × 1.2 m, as shown in Fig. 4. The plate is supported on a linear guide rail system, which facilitates the movement of the table platform in only a horizontal direction and prevents its motion in the unwanted degrees of freedom. The plate base is connected with the pistols of the main cylinders so that it can be driven by the pneumatic actuator system. There are 165 threaded holes (11 rows, 15 columns) with 100-mm spacings in the top table surface for mounting the laminar shear box.

The shaking table platform
2.3 Laminar shear box
A multi-layered flexible shear box with an interior dimension of 1.2 × 1.0 × 0.8 m was designed to allow the soil in the box to deform in the same manner as a free field when shaken by the shaking table. Therefore, the boundary effect can be reduced to a very low level during shaking. Figure 5 shows the overall view of the laminar box. The box is composed of 15 layers of sliding frames, as schematically shown in Fig. 6. Each layer is composed of an aluminum frame with a 40-mm-thick and 50-mm-high cross section. The bottom-most layer is rigidly connected to a solid aluminum base, which is fixed on the table platform. The gap between the adjacent layers is 4 mm. Four sets of bearings, two on each side, are used to connect the adjacent layers. These bearings are designed to allow for the free movement of the layers in the longitudinal direction and to restrain their lateral and vertical movements. A silicone rubber membrane is placed inside the box to make the box watertight to contain saturated soils.

An overview of the laminar box

An illustration of the laminar box
2.4 Control system
An image of the control system is shown in Fig. 7. The control system includes a personal computer (PC), a waveform generator, a digital-to-analog converter (D/A converter), and an integrated controller. A flow chart of this system is shown in Fig. 8. The input waveform data are a time history of voltage (−5,000 to 5,000 mV). The PC first sends the waveform data to the memory of the waveform generator. The waveform generator then generates the digital signals and transports them to the D/A converter. The D/A converter changes the digital signals to analog signals and sends them to the integrated controller. According to the analog signals, the integrated controller directs the command signals to the pneumatic actuator system, by which the shaking table can be driven.

An image of the control system

A flow chart of the control system
3 Vibration characteristics of the pneumatic shaking table
Considering the power limit and the hysteresis effect of air compression, the designed frequency range for the shaking table system is 0–10 Hz, and the load range is 0–1,300 kg. Within these ranges, a series of performance tests under different conditions were conducted to understand the vibration characteristics of the pneumatic shaking table, especially the effects of frequency, load, and input voltage. The testing cases are shown in Table 1. In each case, the input voltage wave was a standard sinusoidal wave, and the output acceleration wave was measured by an accelerometer, which was fixed on the table platform.
3.1 Effect of frequency
Figure 9 displays the measured acceleration values at the table platform both in the time and frequency domains in Cases 1–5. All five cases bear no load. The amplitudes of the input voltage wave are the same (1,000 mV), but the frequencies vary from 1 to 5 Hz.

Performance test results of the cases with different frequencies
For Cases 1–3 with lower frequencies (1–3 Hz), although the input voltage is a standard sinusoidal wave, the output acceleration waves do not adapt to a harmonic shape. In the frequency domain, the predominant frequency does not concentrate on the expected value. However, for Cases 4 and 5 with higher frequencies (4–5 Hz), the output acceleration waves are far more harmonic than that for Cases 1–3. The predominant frequency of the output acceleration wave coincides with the input wave. These results indicate that the shaking table can provide a better reproduction of the input sinusoidal wave with higher frequencies (>3 Hz). In the lower frequency range (≤3 Hz), the shaking table cannot well reproduce the input sinusoidal wave. Therefore, it is better to use vibration frequencies of >3 Hz in model tests and to avoid lower frequencies. The inconsistencies between the input and output waves at low frequencies are mainly caused by the nonlinear friction force in the system. The shaking table is driven by the resultant force of air pressure force P and the friction force F r. When the shaking table vibrates at low frequencies, the air pressure force P is small because the acceleration is small. Hence, the friction force accounts for a large share in the resultant force. Because the friction force is highly nonlinear, the shaking table movement is inharmonic at low frequencies.
3.2 Effect of load
Figure 10 displays the output acceleration waves of Cases 5–7 in which the input wave is the same but the loads vary. The loads were applied by placing sandbags with a specific weight into the laminar box, as shown in Fig. 11. The output acceleration waves are harmonic in all three cases with a vibration frequency of 5 Hz. The amplitudes of the acceleration waves decrease with increasing load. When compared with Case 5, the peak accelerations of Cases 6 and 7 decrease by 22 and 32 %, respectively. These results indicate that the load will influence the magnitude of the output acceleration of the shaking table.

Performance test results of the cases with different loads

Load applications in the laminar box
3.3 Effect of input voltage
The actuator system adjusts the pressure and the flow rate of the pressurized air that flows into the main cylinders according to the magnitude of the input voltage. Figure 12 displays the test results of Cases 7–10 in which the loads and frequencies are the same, but the input voltage amplitudes range from 1,000 to 4,000 mV. From Fig. 12, the output accelerations increase with increasing voltage. Figure 13 demonstrates the relationship between the peak values of the acceleration waves and the amplitudes of the input voltage waves. When ranging from 1,000 to 3,000 mV, the output accelerations increase almost linearly with increasing input voltage amplitudes. However, when ranging from 3,000 to 4,000 mV, the output accelerations are almost unchanged. This result indicates that a limitation in the output acceleration by which the maximum power from the actuator is applied to the table platform exists.

Performance test results of the cases with different input voltages

Relationship between the acceleration peak values and input voltages
From the above performance test results, the waveform of the output acceleration is mainly influenced by the frequency: The higher the frequency, the more harmonic the output acceleration waveform will be. In contrast, the magnitude of the output acceleration is greatly influenced by the load and input voltage. Because most shaking table experiments require control of the maximum movement acceleration, calibrating the acceleration under a certain load by adjusting the input voltage before the real tests is recommended. The method is to first apply the same load with the weight of the expected tested specimen on the shaking table and then perform calibration tests using different input voltages from small to large values. The value that can bring the output acceleration closest to the expected value is selected.
4 Liquefaction test on pure sandy ground
As an application example of the newly developed pneumatic shaking table device, a liquefaction test on pure sandy ground is described in this section.
4.1 Model ground
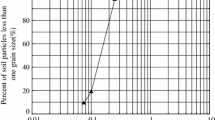
The material of the model ground used for this experiment is standard Toyoura sand. The sand particle size is very uniform and is widely used in geotechnical experiments in Japan. The physical properties of Toyoura sand are listed in Table 2.
Initial loose sandy ground with a void ratio of 0.78 and relative density of 53 % was carefully prepared using the water pluviation method. Water (depth of 10 cm) was first poured into the shear box, and saturated sand was then slowly and carefully poured into the shear box with scoops beneath the water level. The model ground was built up little by little until the ground reached the height of approximately 60 cm. To measure the initial density of the model ground, another small ground was prepared in a small container using the same preparation method. The mass of the ground and the volume of the container were measured after preparation, and the initial density was computed.
4.2 Measurements
Two types of sensors were used in the shaking table tests, as shown in Fig. 14. Accelerometers (numbered as AS1 to AS10) were installed at different positions in the ground to measure the acceleration responses of the ground and on the table platform (AS11) to measure the output acceleration of the shaking table. Pore pressure transducers (numbered as PP1 to PP10) were installed in different depths to measure the accumulated excess pore water pressure (EPWP).

Layout of the sensors. a Vertical view, b planar view
4.3 Input wave and table movements
The input voltage and output acceleration wave are shown in Figs. 15 and 16, respectively. The input wave was designed as a sweep sinusoidal wave with amplitudes ranging from 0 to 600 mV. The frequency was 4 Hz. From Fig. 16, the overall output acceleration wave has the same sweep sinusoidal waveform as that of the input wave. However, a notable sudden change in acceleration at the moment of approximately t = 10 s was observed. Compared with the time history of the EPWP measured in the model ground shown in Fig. 17, this sudden change in acceleration occurred almost simultaneously with a sharp increase of EPWP, which signifies ground liquefaction. Thus, this sudden change in output acceleration was caused by the ground liquefaction. When the ground began to liquefy, the ground stiffness changed greatly and sharply. The change of the ground stiffness would react on the actuator system, influencing the shaking table movement. To confirm this influence of liquefaction, another test using dry sand (without liquefaction) was conducted, and the time history of the output acceleration is shown in Fig. 18. It is clear that the sudden change in output acceleration is not observed in the case of dry sand.

Input voltage wave

Output acceleration wave

Time history of the EPWP measured by PP3

Output acceleration wave in the test using dry sand (without liquefaction)
4.4 Soil responses and pore water pressure changes
Figure 19 displays the measured acceleration response and EPWP in the center of the model ground. As shown in Fig. 16, the acceleration of the table platform continuously increased from 0 to approximately 300 cm/s2. Therefore, the applied dynamic loading to the model ground was very small at the beginning, and the ground did not liquefy. When the acceleration response increased to approximately 50 cm/s2 (t = 10 s), the ground suddenly liquefied, and the EPWP increased very quickly. Because of the degradation of ground stiffness, the vibration energy that was transferred from the shaking table to the ground became very weak, and the ground only vibrated in a very small amplitude, although at this time, the input motions of the shaking table were increasing. When the shaking table motion stopped, the EPWP began to dissipate. In comparison with the sharp increase of pore pressure when liquefaction started, the dissipation process persisted for a long time period (approximately 20 s).

Time history of the measured acceleration and EPWP values by AS3 and PP3, respectively
5 Conclusions
The shaking tables that are used in earthquake geotechnical engineering are generally driven with hydraulic actuators and perform at a high cost. A pneumatic shaking table can be considered as an alternative to a hydraulic shaking table. This paper describes the design, development, calibration, and performance of a pneumatic shaking table system. The main conclusions from this study are as follows:
-
1.
The shaking table device consists of a pneumatic actuator system, a table platform, a laminar shear box, and a control system. The pneumatic actuator system uses pressurized air as the power transmission medium and drives the table platform by controlling the pressure, direction, and flow rate of the air flowing into the two main cylinders. A laminar box, which is fixed on the platform, can reduce the boundary effects during shaking. The control system converts the input digital data into analog command signals that are sent to the actuator system.
-
2.
The performance tests show that the pneumatic shaking table can well reproduce the input sinusoidal waveform with higher frequencies (>3 Hz). At lower frequencies (≤3 Hz), however, some unexpected noisy waves mix with the output acceleration wave. This wave distortion is caused by the nonlinearity of the system at low frequencies. Therefore, the suitable frequency range for the shaking table tests is larger than 3 Hz.
-
3.
The amplitude of the output acceleration wave is influenced by the combination effects of the input voltage and the load. Before conducting a real shaking table test, the output acceleration under a specific load should be calibrated by adjusting the input voltage.
-
4.
The pneumatic shaking table was successfully applied to a liquefaction test on sandy ground, and the behaviors of the liquefied ground were investigated. From this application example, it is proved that the shaking table can offer satisfactory performances for small-scaled model tests.
References
Giri D, Sengupta A (2010) Dynamic behavior of small-scale model slopes in shaking-table tests. Int J Geotech Eng 4(1):1–11
Huang Y, Mao WW, Zheng H, Li GH (2012) Computational fluid dynamics modeling of post-liquefaction soil flow using the volume of fluid method. Bull Eng Geol Environ 71(2):359–366
Kim J, Riemer M, Bray JD (2005) Dynamic properties of geosynthetic interfaces. Geotech Test J 28(3):288–296
Motamed R, Towhata I (2010) Shaking-table model tests on pile groups behind quay walls subjected to lateral spreading. J Geotech Geoenviron Eng ASCE 136(3):477–489
Ogawa N, Ohtani K, Katayama T, Shibata H (2001) Construction of a three-dimensional, large-scale shaking table and development of core technology. Philos Trans R Soc A: Math Phys Eng Sci 359(1786):1725–1751
Sato M, Inoue T (2004) General frame work of research topics utilizing the 3-D full-scale earthquake testing facility. J Jpn Assoc Earthq Eng 4(3):448–456
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No. 41002094), the Science Foundation of Key Laboratory of Engineering Geomechanics, Institute of Geology and Geophysics, Chinese Academy of Sciences (No. KLEG201108), and the Kwang-Hua Fund for College of Civil Engineering, Tongji University.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ye, B., Ye, G., Ye, W. et al. A pneumatic shaking table and its application to a liquefaction test on saturated sand. Nat Hazards 66, 375–388 (2013). https://doi.org/10.1007/s11069-012-0489-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-012-0489-6