
Abstract
Increasing numbers of hard environmental constraints are being imposed in urban traffic networks by authorities in an attempt to mitigate pollution caused by traffic. However, it is not trivial for authorities to assess the cost of imposing such hard environmental constraints. This leads to difficulties when setting the constraining values as well as implementing effective control measures. For that reason, quantifying the cost of imposing hard environmental constraints for a certain network becomes crucial. This paper first indicates that for a given network, such cost is not only related to the attribution of environmental constraints but also related to the considered control measures. Next, we present an assessment criterion that quantifies the loss of optimality under the control measures considered by introducing the environmental constraints. The criterion can be acquired by solving a bi-level programming problem with/without environmental constraints. A simple case study shows its practicability as well as the differences between this framework and other frameworks integrating the environmental aspects. This proposed framework is widely applicable when assessing the interaction of traffic and its environmental aspects.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Environmental concerns have become an important issue in traffic management as well as in traffic impact assessment. Traffic emissions, especially nitrogen oxides (NOx), carbon monoxide (CO), and Particulate Matters (PM), and other local pollutants, are key contributors to urban pollution (Carslaw et al. 2011; Du et al. 2012). The growing number of automobiles, combined with a continuous pursuit of a more enhanced quality of life, makes air quality control even more challenging.
Many approaches and measures exist to mitigate the negative environmental impact of traffic. These measures can be classified on the basis of the scale that they operate upon. Macroscopic measures usually focus on reducing the excess car transport demand and try to improve the composition of vehicle types. Mesoscopic measures are concerned with the issue of improving driving patterns and influencing traffic assignment to the network. Finally, microscopic measures focus on the vehicle level, such as employing advanced vehicular technology. It is worth noting that the final traffic emissions result from a complex interaction on the three mentioned scales since all the measures are mutually intertwined and moreover do not necessarily lead to positive effects on all aspects.
In practice all the approaches and measures are implemented often with different goals in mind, with or without environmental targets. These goals are normally pre-set by the authorities from a preliminary research on the relationship between traffic emission, environment-related damage, safety and economic loss. Only in accordance to a specific goal, a set of suitable measures can be selected. For example, the decrease of total emission is a primary goal concerning all pollutants. However, to some extent, it makes more sense to focus on the pollutants influencing large scale areas and with a long term effect, such as CO2, CH4 and other greenhouse gasses. On the other hand some pollutants have a short-period but harmful influence on human health, such as NOx, CO, PM and Noise. For such kind of pollutants the goal naturally is to force them under certain dangerous levels.
When trying to achieve some goals which are only related to environmental performance, it is necessary for the authorities to understand the impact of satisfying such a goal to other traffic-related and environmental indicators. Moreover, the local and short-period environmental goals are frequently superimposed onto the global environmental goals in urban areas, especially in large cities such as Beijing (Wu et al. 2010) and London. Such local environmental constraints have a complex influence on other goals in the network, such as traffic accessibility and global environmental goals, because the different goals are unfortunately not always aligned and often in conflict. These kinds of conflict occur when the goals focus on different pollutants, different spatial and temporal scales, and different spatial and temporal parts (the goal on one link/at 1 h may contradict a goal on another link/at another hour). The traffic performance, as one main concern in traffic management, is generally considered as being deteriorated by imposing the environmental constraints. However, in some cases, such as imposing an environmental constraint in the middle link of Braess’s paradox network (Braess 1968; Park 2011), it may occur that those local environmental constraints are beneficial to the global traffic performance.
Despite the complexity of the system due to variable control measures, goals and other factors, it is of critical importance to establish a metric that allows us to assess the impact of imposing a specific environmental goal to the network. Besides, in practical applications, the number of suitable control measures in a certain urban area is somewhat limited and normally only a restricted set of control measures can be implemented or are under the authority. This leads to the main research question in this study: How can we assess the influence of achieving certain environmental goals to the network as a whole, based on the available set of control measures?
To address this research question, a novel metric criterion named Loss of Optimality and corresponding framework are presented in order to give the policy makers a general idea about the influence of imposing environmental constraints to the network, given the available control measures. In this study we focus especially on the influence on traffic performance and local environmental constraints but both can easily be extended. The framework adopts the structure of the Network Design Problem (NDP). The essential idea of this framework is primarily to quantify the loss in performances as compared to the best achievable system performance—that is under optimal control and user equilibrium—caused by the introduction of environmental constraints.
This paper is composed as follows: Section 2, state-of-the-art reviews different existent approaches involving the environmental aspect in traffic management. In Section 3, the absence of a suitable framework to assess the influence of imposing local environmental constraints is ascertained, and a framework is established based on a bi-level programming approach inspired by the Network Design Problem. In Section 4, a simple static network is used to compare the proposed approach and other existent approaches. Finally, Section 5 contains some discussion about further applications based on the framework.
2 State-of-the-Art
The study of the environmental aspects of traffic has a long history. The roles of such aspects differed according to the purposes of the researches. In this section, we first study different concerns on environmental aspects in order to define the role of environmental constraints in traffic.
2.1 Ex-ante Evaluation
In the early stages, the investigations primarily dealt with measuring the amount of pollutants emitted by traffic (Waller et al. 1961, 1965). Information was gathered on the pollutants composition, the quantity, their contribution to environment pollution, and the relationship between emission, speed, vehicle types and other variables (Zhang et al. 2011). The study of the mechanisms of emission lead to the development of a great number of emission models (Smit et al. 2010). These models could be used as tools to evaluate the traffic environmental performance such as total emission, concentration, based on existing situations or resulting from a pre-set policy (Borrego et al. 2006; Wang et al. 2009, 2011). The environmental performance may be evaluated based directly on traffic data or indirectly through traffic models. This approach allows the use of fairly involved environmental models leading to detailed results on environmental performance, and therefore is popular in traffic environmental impact assessment. However, one key drawback is that there is no direct feedback from environmental results to traffic policy during the simulation process. Traffic-related policies to ensure the environmental goals cannot be proved or improved unless the environmental simulation results finalize. Some goals can only be achieved by a decision selection process from a limited number of pre-set scenarios or by a ‘trail-and-error’ process.
2.2 Ex-post Analysis
Therefore, an alternate to the ex-ante process, the ex-post or so called ‘Inverse’ approaches were developed. In these approaches, the environmental aspects determine the suitable traffic assignments, reflecting the traffic status. For a detailed review of such problems, we refer to Szeto et al. (2012).
The suitable traffic assignment for environmental goals can be realized by the users’ spontaneous behavior or control measures. The former one is formulated as a user equilibrium problem with environmental concerns. For example, the users are assumed to choose their routes according to the equality of emission instead of travel time (Rilett and Benedek 1994), or according to minimal total sustainability cost including both emission cost and travel cost (Benedek and Rilett 1998). However, due to users’ selfish behaviors, they do not consider such sustainability goals unless environmental aspects become direct and instant costs to them. This spontaneous behavior may occur if users take the fuel consumption as the travel cost instead of the time cost (Behrisch et al. 2012). Otherwise, external cost needs to be charged in order to influence users’ choices. Johansson (1997; Johansson-Stenman 2006) suggested that such external cost should include marginal system cost, user’s own environmental cost and marginal system environmental cost, with the purpose of achieving optimal total cost including both travel cost and emission cost. As a result, tolling based on such external costs is naturally proposed as the control measure. There is however not only tolling but also other control measures for environmental goals. Unfortunately, many of them could not employ the marginal cost framework, and therefore were modeled as optimization problem, in order to seek the proper measures. Besides, the goals may not be exactly the integrated cost but a special system performance (Proost and Van Dender 2001; Zhang et al. 2010; Li et al. 2013) or multi objectives (Yin 2002; Wismans et al. 2011; Szeto et al. 2013).
2.3 Analysis on Environmental Constraints
In practice environmental constraints, often called environmental standards, are imposed in order to guarantee that the total emission or the emission in a local area is under some certain levels, for example, the Carbon budgets policy and local noise constraints. Compared to the environmental goals related to amount or cost, such constraints have a non-continuous character: there is no influence when the standards are satisfied, but critical influence when the standards are not satisfied. As a result, these constraints cannot be incorporated in the ordinary objective function related to amount and thus several alternative approaches can be used. One approach is to transform the non-continuous goal function of environmental constraints into a continuous penalty function by smoothing. In another approach, modified network parameters, such as environmental capacity (Immers and Oosterbaan 1991; Bekhor and Iscovitch 2011), are used. These parameters indicate that the area becomes less attractive when the emissions of such an area are close to the constraint. These two approaches treat the environmental constraints as soft constraints, meaning that constraints can be exceeded but then the system will suffer from a high cost. In the policy making process, such excess is often unacceptable, especially in the preliminary stage of assessment. Other approaches employ hard environmental constraints. As one approach, the concept of searching for proper control measures was developed. For example, Lin et al. (2010) suggested using an inverse fundamental diagram to guide the search for control measures satisfying the hard link environmental constraints. Another alternative approach to involving the hard link environmental constraints is formulating such problems in the framework of user equilibrium with side constraints (UE-SC). The UE-SC framework has been well developed since the work of Ferrari (1995) and Larsson and Patriksson (1995), in both static and dynamic approaches (Chen and Wang 1999; Larsson and Patriksson 2004; Chen et al. 2011; Zhong et al. 2011). Furthermore, as a special case of hard constraints, the constraint conformity probability can be analyzed under the stochastic framework (Ng and Lo 2013).
3 Loss of Optimality
3.1 The Role of Environmental Hard Constraints
There is a tendency at introducing environmental aspects into traffic management. Some research considered the hard environmental constraints but few researchers have addressed the impact of such constraints in traffic network management. However, the impact can be correctly assessed only if there exists a proper understanding of the role of the environmental constraints in traffic networks.
Firstly, environmental hard constraints are definitely traffic management goals which need to be achieved. However, those constraints do not require optimal value, compared to other goals such as total traffic cost. This indicates that those approaches involving environmental constraints in the objective function are not relevant to assess the impact, and there could be multi scenarios to attain the constraints. The multi scenarios make it possible to simultaneously consider other management goals.
Secondly, the environmental constraints will always influence the selection of appropriate control measures. To some extent, they have negative impact by limiting the solution space of available control measures. Although the objective function of UE-SC gives a unique result satisfying the constraints, the assignment does not tell much about the fundamental influence of the constraint in traffic management. It is well-known that unconstrained UE is not efficient in the sense of system performance (Sheffi 1984). Some links in the assignment with efficient performance, such as System Optimum (SO), may carry more or less flow than those in the UE. The UE-SC coincidently pushes the flows away from or towards SO. As a result, the positive or negative impact of the environmental constraints in UE-SC purely depends just on whether the constraints hit a link that should carry more or less flow in SO (e.g. the Braess’s paradox network example mentioned in Section 1).
Thirdly, since the environmental constraints will not be respected spontaneously and hence need to be enforced by appropriate control measures, the impact of imposing environmental constraints depends the available control measures. A similar System Optimum with side constraints (SO-SC) can be employed to avoid the incorrect influence and at the same time the users’ spontaneous behavior can be guided by a proposed tolling approach. However, this kind of framework can only include a special group of control measures, such as first-best tolling and access constraints (Zhong et al. 2012). It is difficult to include other control measures, such as tolling on partial links, speed limits, signal control, metering, eco-driving and most macroscopic, microscopic measures.
In order to enable policy makers to find the best trade-off between network performance and environmental damage under certain control strategies it is useful to have a concise metric or assessment criterion that quantifies the impact of imposing local environmental constraints. Three requirements for the assessment criterion need to be addressed according to the role of environmental constraints discussed above. First, it should reflect the impact of imposing constraints, for example it must show the performance change of the network after imposing the environmental constraints. Second, it should be possible to compare the assessment criterion of one environmental constraint set in a network to other sets of different environmental constraints. Moreover, the criterion should be able to reflect the impact of a particular environmental constraint set to different network or demand scenarios. Third, the assessment criterion must be expressed as a unique number for given constraints and input data.
3.2 Assessment Based on Loss of Optimality
Based on these requirements, we suggest the criterion Loss of Optimality LO(EC|M) by introducing the environmental constraints EC under the control measures M.
Here, J Smin (M) is the cost of the System Second-best Optimum resulting from selecting optimal control parameters for the set of measures M (SSOM), which includes all possible control measures. Likewise, J S − ECmin (EC|M) is the second-best optimal system cost with environmental constraints (SSOM-EC). Therefore, the optimality in the term of Loss of Optimality relates to the sub-optimum under the available control measures. The assessment criterion is expressed as one concise non-negative quantity for a given environmental constraints vectors EC and a given set M. If LO(EC|M) equals zero, the environmental constraints have no influence on the optimal performance of the network. The larger the LO(EC|M) value is, the more the environmental constraints reduce the potential to reach optimal performance of the network. This criterion is inspired by the basic concern of choosing a possible control strategy in traffic management: in order to satisfy the primary objective, expressed by the environmental constraints, in principle several control strategies are available. Then, a secondary objective has to be set in order to select one strategy from these possible control strategies. In traffic management, a control strategy which leads to a better traffic performance is clearly preferred. As a result, the control strategy leading to SSOM-EC is preferably selected to assess the environmental impact. A similar assessment criterion was proposed by Yang et al. (2010), but it was used to assess the efficiency of tolling by comparing the cost between the system second-best optimum under possible tolling strategies and the system first-best optimal (SO) cost.
“Optimality” quantifies the potential best use of a network under optimal control and assuming a UE response, and then “Loss” reflects the reduction of the feasible space by environmental constraints. This better quantifies the real “damage” to the potential of efficient network use because satisfaction of the activated environmental constraints can only be achieved by applying suitable control measures. This is also apparent by a property that our approach has: an environmental constraint will always have a positive cost; which complies with the intuition that constraining a solution more should never improve the solution.
3.3 Framework of Calculating Loss of Optimality
The next step for establishing the framework is finding a way to calculate J Smin (M) and J S − ECmin (EC|M). This problem can be solved on the other hand as a Network Design Problem (NDP) with additional constraints. Initially, the term NDP considers topologic plans of the network, for instance expanding the network infrastructure. The widest definition of NDP includes not only strategic and tactical decisions, but also the operational decisions, such as tolling, signal control, speed limit and other short-term control measures (Farahani et al. 2013). An interesting alternative is offered by seeking suitable traffic control measures, which guide the users of the network in achieving the aims of network management. It means that the users will follow “their own choice” influenced by certain traffic control measures. Therefore, the users’ behaviors can be described as a User Equilibrium (UE) problem under certain traffic control measures such as tolls, speed limits, flow restrictions and others. This represents the lower level problem and is only influenced by the control measures and users characteristics. The upper level consists of achieving some “aims” set by the policy makers. The NDP seeks suitable control measures which satisfies both the UE assignment and these “aims”.
Traffic assignment is to seek traffic flow patterns F, under some route choices concerns for a given network (Sheffi 1984). A traffic assignment with single-class mode should satisfy the set of basic constraints ℬ(M), such as flow conservation constraints, flow propagation constraints, non-negativity constraints and network topological constraints (Chen et al. 1999).
M ⊆ M is the set of applied control measures, while M is the set of all possible measures that can be applied. Therefore, ℬ(M) indicates that ℬ is related to M. Meanwhile, the traffic flow patterns also need to satisfy A(M), the constraints of given type of assignment A. The set of these traffic patterns satisfying both constraints is defined as Γ A(M) = {F|F s. t. A(M) & ℬ(M)} and Γ A = {Γ A(M), ∀ M ⊆ M} . In other words, Γ A(M) is mapping to the traffic flow patterns under assignment A with the measures set M. Because the users’ behaviors can be described as a User Equilibrium problem in the assignment, Γ UE(M) is usually applied as the certain assignments. A Network Design problem can be finally defined as
Here J(M, F) is the objective function based on the policy goals, g(M, F) and h(M, F) are the additional constraints, all with respect to the design purposes.
The optimization problem (2)–(3) has a bi-level structure. The problem of finding the feasible set is usually described as a lower level optimization problem. For the mathematical description of User Equilibrium in a static approach, we refer to Sheffi (1984) and in a dynamic approach we refer to Friesz et al. (1993) and Chen et al. (1999).
3.4 Bi-level Programming Formulation
In our framework, we look for the minimal system cost with/without the environmental constraints J S − ECmin (EC|M) and J Smin (M), following the Eq. (1). If the network parameters and M are given, the objective function value J Smin (M) is unique and minimal (even though there may exist multiple flow patterns and control settings being all globally minimum and having the same minimal J-value) and not related to environmental constraints. Only J S − ECmin (EC|M) is related to environmental constraints EC. It means that LO(EC|M) is only related to J S − ECmin (EC|M) for a given M. Therefore, the problem to calculate LO(EC|M) can be transformed to the problem of calculating J S − ECmin (EC|M), which can be solved by the bi-level optimization problem defined below.
TC(F UE − EC) is the total travel cost under the flow pattern F UE − EC. It is equal to the total travel costs of all vehicles in the network, and indicates the total system cost is primarily considered as the traffic performance criterion. Depending on the adopted traffic flow model, this function has different expressions, and can contain different components, besides travel times (Sheffi 1984; Ban and Liu 2009; Karoonsoontawong and Waller 2010). Moreover, it can involve more cost besides the travel time cost. One may for instance consider climate impact, so J would be formulated as the sum of total travel cost and total carbon emission. The constraint (5a) is the User Equilibrium constraints and acquired from the lower optimization problem with control measures M. Constraint (5b) represents the environmental constraints. EC is the vector value of different kinds of environmental constraints and E(M, F UE − EC) is the vector of corresponding environmental constraint functions under F UE − EC and M for EC, for example, E k (M, F UE − EC) ≤ EC k for the k-th environmental constraint. M implies that some control measures can also influence some non-traffic related elements in this equation. For example, encouraging the use of cleaner vehicles may reduce the emission factors for each single vehicle, but this measure has nothing to do with traffic patterns. J Smin (M) can be calculated by the same methodology without constraints (5b).
The bi-level programming approach is a reflection of a Stackelberg game: the upper level reflects the concerns of the leaders, for example, authorities, to implement suitable control measures to achieve their aims in anticipation of the users’ response. The lower level reflects the users’ behavior. The users choose appropriate actions according to the decisions made at the upper level in order to achieve their own benefits, for example, minimizing the individual travel time. As a result, the lower level can be described as users’ spontaneous behavior according to the control measures and other conditions, such as link capacity constraints. In reality, the users mainly consider their own individual cost, e.g., travel time, fuel consumption (Behrisch et al. 2012), tolls based on environmental costs (Benedek and Rilett 1998), and individual safety concerns. However, the environmental constraints are not considered in those cases. Different from the capacity constraints or demand constraints, the users will not spontaneously take actions to satisfy the environmental constraints, because the constraints are not mandatory to the users. Only in the upper level, the authorities will select suitable control measures to guide the users to satisfy the constraints. As a result, the environmental constraints may not be involved in the lower level problem. With these arguments, we confirm the statement by Yang and Bell (1997) that treating environmental constraints at the lower level may lead to incorrect results by ignoring the impact of control measures.
3.5 Further Discussion About the Framework
Despite the similarity between the environmental constraints and the control constraints in the classic NDP bi-level framework, the environmental constraints are more complex due to their non-linearity. Besides, the control constraints, such as budget constraints and signal control constraints (Karoonsoontawong and Waller 2010), are also considered in this framework by the control measures M ⊆ M. Yang and Bell (1997) primarily suggested a similar bi-level programming approach to find the optimal tolling strategy in order to satisfy the environmental constraints. Our approach is an extension by involving more control measures and is considered as a tool to assess the cost of environmental constraints.
This framework is a novel application of existing NDP problems. As discussed in Section 1, there are various control measures focusing on different scale levels in reality, so the universal NDP framework can present the complex influences from control measures and environmental constraints. Different control measures can be further sorted and some algorithms are possible to be employed for special groups.
M in Eqs. (4)–(5) indicates that the control measures influence the upper objective function, user equilibrium as well as the environmental functions; besides, the traffic flow patterns influenced by the control measures in (5a), have influences on both objective function and environmental functions. Assuming all the equations satisfy the conditions of differentiability, the total derivative of one emission function E i from the left side of Eq. (5b) becomes:
The first term indicates the direct influence to emission/environmental aspects from the control measures, and the second term indicates the change of emission/environmental aspects influenced by the re-assignment of traffic flow patterns F. As a result, the control measures can be sorted into three groups based on DI and II.
-
1.
DI = 0/II ≠ 0: The control measures only influence the assignment and the emission is only influenced indirectly through the assignment. One case is tolling.
-
2.
DI ≠ 0/II = 0: The control measures only influence environmental function but don’t influence the assignment. These control measures are mainly from environmental management. One case is scrappage program.
-
3.
DI ≠ 0/II ≠ 0: The control measures influence assignment as well as environmental functions. This group is the largest group in reality but in theoretical, these groups are often neglected by simplified into group 1 or 2. Speed limit for example is one such measure. In many researches, it is considered as the same influence as tolling approach because both influence the route choices by imposing additional route cost. Other studies consider only the fact that speed limit influences the driving patterns, so it has direct influence on the emission besides indirect influence. The NDP framework can capture both influences.
Generally, some specific approaches exist to solving corresponding NDP problems, depending on different environmental constraints, possible control measures set M, different upper level objectives and continuous/discrete control variables (Feng, et al. 2010; Kotsialos and Papageorgiou 2004; Yang et al. 2008; Zegeye et al. 2010; Wismans et al. 2011; Farvaresh and Sepehri 2013). However, simplified approaches exist for some control measures sorted into Group 1 and Group 2. For example, if considering a global tolling approach from Group 1, the framework of SO-EC can be employed to find the optimality and corresponding control variables (Zhong, et al. 2012). Besides, if considering a control measure from Group 2, the lower programing (5a) is therefore fixed and not necessary to be calculated (Wang et al. 2009).
On the one hand, it is possible to simplify some control measures from Group 3 as from Group 1. For example, assuming environmental functions are only related to traffic flow but nothing to do with driving patterns, the speed limits or additional delay can be simplified into Group 1. Therefore, some similar algorithms from route guidance or tolling can be employed. On the other hand, control measures can be complicated if necessary. For example, the scrappage program only influences the approximate emission factors; however, considering less energy consumption of new vehicles, the travel cost function and utility function may be influenced, so are the assignment and traffic flow patterns.
In some extreme cases, the feasible set of control strategies could be null if constraints are too stringent. Therefore, another issue of applying this framework is the existence of solution. Generally, some universal methodologies can be employed to preliminarily examine the existence, such as the Phase I method in interior-point methods for the feasibility (Boyd and Vandenberghe 2004). Besides, different approaches can be used according to the different control measures and their groups. For example, if the control measures are from Group 2, the solution exists only when the constraint is no less than the emission with minimal emission factors under given environmental management measures. The simplifying approaches can be also employed to approximately obtain whether the solution exists during a range, such as transferring the non-linear relationship between flow and emission as the linear relationship discussed earlier.
4 Case Study
We present a simple network to show the concept of the proposed assessment framework. In Section 4.1, different approaches including the referred ones are compared and illustrate that SSOM-EC is an appropriate variable to assess the influence of imposing environmental constraints in the network. In Section 4.2, the application of this framework is shown by the comparison of different values of environmental constraints, different available control measures and different kinds of environmental constraints.
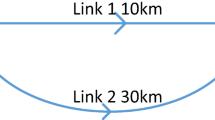
The network of the case study is illustrated in Fig. 1. Link 1 is a shorter route across the city and Link 2 is a longer highway around the city. The cost functions of Link 1 and Link 2 are respectively t 1 = 12 + 0.02q 2 (minutes) and t 2 = 18 + 0.005q 2 (minutes). The cost functions imply that the free flow speeds on both links are respectively 50 km/h and 100 km/h. The fixed demand from origin to destination is 3,000 vehicle/h.

Network
Next, NO2 is selected as the concerned pollutant. We shall use COPERT4 (Zachariadis and Samaras 1999) as the emission model. COPERT4 is a macroscopic emission model and widely applied in urban network traffic emission evaluations. Its input data include more macroscopic parameters, such as vehicle composition, fuel quality, weather parameters and road types.
We assume that speed is the only influence factor in this simple case study. To this end we obtain a curve relating speed with NO2 based on the properties of the vehicles, the fuel quality and weather data (Fig. 2). In our case we use factors applicable to the situation in Belgium, from COPERT4 database. The curve is not monotonically decreasing. The optimal driving speed that minimizes the NO2 emissions turns out to be around 70 km/h. It implies that the average travel time and NO2 emission factors are not aligned on the highway link.

Speed vs. NO2 emission factor
Therefore, the total costs and emissions on Link 1 from six different problems, respectively defined as P j are compared. The base line P 0 reflects the User Equilibrium assignment. The traffic pattern \( {F}^{P_0} \) from the solution is the only element of Γ UE(0). P 1 is the classic system optimum network design problem (SSO) with the objective of minimizing the total travel cost only. P 2 and P 3 are two different approaches integrating traffic cost and environmental cost, by converting into monetary cost (STE1) or normalization (STE2). P 4 is the UE-SC problem, and it is a single level programming problem. P 5 is the SSOM-EC problem and equivalent to calculating J S − ECmin (EC|M). The tolling measure only on Link 1 is evaluated.
Table 1 lists four upper level problems with the same lower level user equilibrium constraint (5a) from the problem (7). Table 2 depicts the two user equilibrium problems.
Because of the simple network, these problems can be solved by simple grid search. Table 3 shows the summary results of P j by traffic flow on Link 1 q 1 , total travel time TT j = ∑ i = 1,2 t i (q i )q i , emission on Link 1 LE 1 = E1(q 1)q 1 and total emission TE j = ∑ i = 1,2E i (q i )q i . It is possible that multiple arguments for corresponding minima exist in some complex networks, which may lead to non-unique results for some non-objective criteria, for example TT 3 and LE 3. In this simple case study, it does not happen. The suggested Loss of Optimality criterion in Eq. (1) avoids the problem of non-unique solutions.
It is obviously that different approaches lead to different results. Considering that the emission constraint on Link 1 is 2,000 g/h, the result of P 0:UE shows that the user equilibrium cannot spontaneously satisfy the local environmental constraint, so some form of control measures is indeed required. By tolling approach, the solutions of P 1, P 2, P 4 and P 5 can satisfy that environmental constraints, but P 3:STE2 cannot. P 2:STE1 and P 3 are essentially equivalent but with different weights. The reason why the solution of P 2 is closer to that of P 1:SSO is mainly caused by the quite low marginal environmental cost. Considering a much higher environmental cost, the balance will move towards the situation with lower total emission but higher total travel time and higher link emission. In order to satisfy the environmental constraint in Link 1, the tolling policy pushes the flow on Link 1 to Link 2. Because SO carries less flow on Link 1, a win-win solution with less travel time and less emission exists in this case study with tolling measures. As a result, P 5:SSOM-EC is the same as P 1:SSO, with the least total travel time and emission on Link 1. Here, P 4:UE-EC satisfies the environmental constraints too, but in the view of policy makers, it is not the best scenario. In Fig. 3, the total travel times and emissions on Link 1 from the solutions of P 4:UE-SC and P 5:SSOM-EC related to the link environmental constraints are compared in order to analyze the differences between the two approaches.

Comparisons between UE-SC and SSOM-EC
The curves from the two problems look equivalent when the link environment constraint is strict (≤1,788 g/h), and become different when the constraint is relaxed (>1,788 g/h). The traffic pattern of the solution for EC 1 = 1,788 g/h is the same as SSOM assignment, which is equivalent to System Optimum (SO) due to tolling measures. When EC 1 > 1,788 g/h, the SSOM-EC keeps the same solution and equals SSOM. This clearly suggests that the environmental constraints do not reduce the network’s potential to SSOM when the constraint is larger than 1,788 g/h, and the environmental constraints start to influence the selection of optimal control measures when it becomes stricter. However, from the curve of UE-EC, the incorrect influence of imposing environmental constraints may be presented. When the environmental constraints are in the range between 1,788 g/h and 2,167 g/h, the traffic managers choose the measures of keeping the link emission equal to the emission constraint, but neglect better strategies for the further reduction on both travel time and emission. Moreover, when the environmental constraints are above 2,167 g/h, the traffic managers start to neglect the strategy of linking actual emission and emission constraints, and stick to the non-control UE strategy. It reflects a strange discrete or ambivalent strategy, while on the contrary SSOM-EC correctly reflects a consistent strategy: try to minimize the total traffic cost while satisfying the environmental constraints. It is worth noting that when the environmental constraint is strict (≤1,788 g/h), the two approaches generate the same curves. It is not generally established, for example, if imposing an environmental constraint on the middle link of Braess’s paradox, the curves from two approaches are totally different.
4.1 Application of the Loss of Optimality
In the above, the comparison of different approaches shows the SSOM-EC has a practical meaning when assessing the cost of imposing environmental constraints. In this part, the application of LO criterion will be shown by the evaluation of imposing different values of environmental constraints, using different control measures and imposing different kind of environmental constraints.
Besides tolling, another control measure of imposing additional delay Δd ≥ 0 only on Link 1 is considered. This is an abstract presentation of widely applied measures that moves the flow away from discouraged routes, such as stricter speed limit, metering, signal control. In order to distinguish the two control measures, we rename the original P 5:SSOM-EC by tolling as P 5G, where G indicates the tolling measures, and correspondingly problem by imposing additional delay is named as P 5D. Therefore, P 5D is:
-
Upper level:
$$ \underset{\varDelta g}{ \min }{J}_{5D}\triangleq {\displaystyle \sum_{i=1,2}{t}_i^d\left({q}_i\right){q}_i} $$(8)$$ \mathrm{s}.\mathrm{t}.\kern1em {\mathrm{E}}_1^d\left({q}_1\right){q}_1\le E{C}_1\kern1em \&\kern1em \left({q}_1,{q}_2\right)\in {\varGamma}^{\mathrm{UE}}(D) $$(9) -
Lower level Γ UE(D)
$$ \underset{{}_{\left({q}_1,{q}_2\right)}}{ \min }{J}_{UED}\triangleq {\displaystyle {\sum}_{i=1,2}{\displaystyle \underset{0}{\overset{q_i}{\int }}{t}_i^d\left(\omega \right) d\omega}} $$(10)$$ \mathrm{s}.\mathrm{t}.\kern1em \left\{{q}_1+{q}_2=3000,{q}_1\ge 0,{q}_2\ge 0\right\} $$(11)
Here, t d i (q i ) is the cost including delay cost t d i (q i ) = t i (q i ) + Δd and E d i (q i ) is the emission of link i with the additional delay control measure. E d i (q i ) = L i EF(L i /t d i (q i )). Note that in Larsson’s approach, the tolling measure and the imposing additional delay measure are equivalent to decentralize a given target flow pattern. From Eq. (8) and E d i (q i ), it can be found that they have different influences on the system cost and emission. Therefore, the two control measures cannot be equivalent when considering emission constraints in this approach as well as in other referred approaches.
First, the LO curves Fig. 4 show that when the environmental constraints activates, the stricter environmental constraint leads to a higher assessment criterion, which indicates larger reduction on the potential to achieve SSOM. Moreover, LO shows the different influences by different control measures under the same environmental constraints. When implementing the tolling measure, LO starts to increase when the environmental constraint reaches 1,788 g/h, and later it starts quadratically increasing when the constraint becomes stricter. Therefore, from the curve, two suggestions can be obtained: If the environmental constraint is above 1,788 g/h, the system second-best optimum by tolling can be achieved. In fact, the system second-best optimum by tolling is the same as system first-best optimum. Besides, the quadratic increase warns the policy maker to not set too strict constraints.

Comparison between tolling and delay by Loss of Optimality
The same environmental constraint satisfied by different measures may have different cost. For example, compared to tolling, curve under imposing additional delay has an earlier activity constraint point and larger slope. These curves advise authorities to carefully consider the LO policy of imposing a strict environmental constraint at a network where only the additional delay control measure can be implemented. Nevertheless, if the emission constraint is quite strict, for example, zero emission, the two curves merge and it means environmental constraints in this range have similar influence, whether toll or additional delay is used to optimize traffic.
Figure 5 shows the interaction between two different kinds of environmental constraints: global emission constraints and local emission constraints. In this problem, only tolling measure is examined. The corresponding assessment criterion LO has two variables the total emission constraint TEC and the link emission constraint on Link 1 in EC 1. As a result, the assessment criterion LO(TEC, EC 1|M) comes from bi-level programming problem P 6:

Contour plot of LO(TEC, EC 1|M)
Where Γ UE(M) is from the same problem indicated in Eq. (7).
The zero LO area indicate where neither constraints have influence on the SSO. The blank/null area means that no solution satisfying both constraints exists. The concave edge indicates TEC and EC 1 are in conflict, which in the simple case shows the strength of this framework to analyze the conflicts of different environmental goals. For example, if restricting TEC from 13 kg/h to 12 kg/h, the strictest value of EC 1 when solution exists has to be relaxed from approximately 1.2 kg/h to 3 kg/h. It is also possible to find which constraint is dominant. Here, if the EC 1 is less than 1.5 kg/h and the TEC is in the range where solution exists, the less EC 1 leads to a higher LO. This means EC 1 is dominant in this range. Oppositely, when the EC 1 range is between 3 kg/h and 5 kg/h, the value of EC 1 does not influence LO but a strict value of TEC will influence.
Even though these comparisons are based on a simple network, it shows that this assessment criterion can be employed in different situations and analyses.
5 Discussion and Future Work
Nowadays, road authorities take not only the traffic performance but also the traffic externalities into account in the traffic management process to meet the policy restrictions within national and international legislations. Unfortunately, these different objectives may be in conflict. Therefore, the authorities need to understand the influence between different objectives before setting the aims. In this paper, we suggested the criterion Loss of Optimality and corresponding framework to assess the influence of environmental constraints to the network. LO firstly indicates that the environmental constraints are not control measures and these constraints can only be satisfied by employing suitable control measures. Moreover, the (usually unintended) effect of environmental constraints in the network is to reduce the solution space of available control measures that are available to optimize traffic patterns in the network. Therefore, in order to quantify the cost of imposing environmental constraints, the available control measures have to be defined primarily. One important application of this framework is to investigate the relation between environmental constraints and traffic performance under certain control measures. For example, if signal control is the only possible control measure in a city, the authorities can obtain a general curve informing the cost of imposing different levels constraints. With the help of such figures, a certain level of environmental constraints can be selected by balancing the loss of optimality with the environmental damage cost.
This framework is handy in the analysis of traffic assignment problems with environmental concerns (Szeto et al. 2012). The impacts of different control measures related to environmental constraints can be normalized as metric criteria, so different applications can be compared. It is possible to find the best control measures according to certain level of environmental constraints (i.e. those having lowest LO). For example, our case study showed that tolling is better than giving additional delay for the given network and parameters. As another example, if there is a nursing home near an arterial street that suffers from the noise, some control measures will be selected in order to decrease the environmental damage. The different LO can be evaluated according to different combination of available control measures, and the control strategy with the least cost is the chosen one. However, if the cost is quite high no matter what the set of control measures are, a noise barrier or even a plan to move the nursing home will be a good choice. Besides, it is also possible to find preferable areas to employ local control measures: LO will help the controller to identify the link if tolling can only be employed on one link in a network.
Another application is to seek the critical environmental constraints from different spatial/temporal parts and pollutants, especially when imposing the local environmental constraints (Lin et al. 2012). The environmental constraints of one pollutant on one link at a certain time may conflict with the environmental constraint of another pollutant on another link at another time. Therefore, it is essential to find the critical environmental constraints which influence the traffic performance most and then apply suitable control measures to solve the global problem, as the preliminary application shown in Fig. 5.
In this framework, total travel time is used to identify the system performance. It is possible to consider other criterions for the system performance. Besides the sustainability cost mentioned in Section 2, some other optimality criteria from the stochastic approaches, such as minimal risk (Li et al. 2012), can be used to reflect different views of network management. The multi-objective optimization can be employed but we do not recommend a Pareto optimal approach. Loss of Optimality avoids the expensive calculation in the Pareto optimal approach by following the general ideas from authorities: for the local constrained pollutant, the amount does not matter if they do not exceed the environmental standards.
This paper suggests LO and the corresponding bi-level framework to model and calculate the criterion. However, it is worthwhile to note that reliable and robust algorithms to solve such problems are important. Because the local environmental functions are usually non-linear and non-convex, and the lower level is a non-convex and non-continuous constraint for the upper level optimization problem in the bi-level approaching, universal solution algorithms hardly exist (Szeto et al. 2012). Based on the control measures, the network topology and environmental functions, it is possible to adopt and develop different meta-heuristic algorithms, to solve special problems. Important progress still needs to be made in this field.
Future work will extend this simple case into a real city case including more traffic constraints and properties. Little research has been done on the influence of local environmental constraints, which can have a much more complex influence on the network than the global environmental constraints. Therefore, the assessment based on the Loss of Optimality will be employed to investigate such influence in different network topologies under various types of control.
References
Ban X, Liu H (2009) A link-node discrete-time dynamic second best toll pricing model with a relaxation solution algorithm. Netw Spat Econ 9(2):243–267
Beckmann MJ, McGuire CB, Winsten CB (1956) Studies in the economics of transportation. Yale University Press, New Haven
Behrisch M, Flötteröd WP et al (2012) Ecological user equilibrium? Paper presented at the 4th International Symposium on Dynamic Traffic Assignment, Martha’s Vineyard, Massachusetts, USA
Bekhor S, Iscovitch O (2011) A model to minimize road traffic noise in the planning phase of a new neighborhood. Paper presented at the Transportation Research Board, Washington D.C, USA
Benedek CM, Rilett LR (1998) Equitable traffic assignment with environmental cost functions. J Transp Eng 124(1):16–22
Borrego C, Martins H et al (2006) How urban structure can affect city sustainability from an air quality perspective. Environ Model Softw 21(4):461–467
Boyd S, Vandenberghe L (2004) Convex Optimization. Cambridge University Press, Cambridge. ISBN 978-0-521-83378-3
Braess D (1968) Uber ein Paradoxon aus der Verkehrsplanung. Unternehmensforschung 12:258–268, Translated into English: Braess D, Nagurney A et al. (2005). On a paradox of traffic planning. Transportation Science, 39: 446–450
Carslaw DC, Beevers SD et al (2011) Recent evidence concerning higher NOx emissions from passenger cars and light duty vehicles. Atmos Environ 45(39):7053–7063
Chen HK, Wang CY (1999) Dynamic capacitated User-Optimal route choice problem. Transp Res Rec J Transp Res Board 1667:16–24
Chen HK et al (1999) Dynamic travel choice models : a variational inequality approach. Springer, Berlin
Chen AT, Zhou Z et al (2011) Modeling physical and environmental side constraints in traffic equilibrium problem. Int J Sustain Transp 5(3):172–197
Du X, Wu Y et al (2012) Intake fraction of PM2.5 and NOX from vehicle emissions in Beijing based on personal exposure data. Atmos Environ 57(0):233–243
Farahani RZ, Miandoabichi E et al (2013) A review of urban transportation network design problems. Eur J Oper Res 229(2):281–302
Farvaresh H, Sepehri MM (2013) A branch and bound algorithm for Bi-level discrete network design problem. Netw Spat Econ 13(1):67–106
Feng T, Zhang J et al (2010) An integrated model system and policy evaluation tool for maximizing mobility under environmental capacity constraints: a case study in Dalian City, China. Transp Res Part D: Transp Environ 15(5):263–274
Ferrari P (1995) Road pricing and network equilibrium. Transp Res B Methodol 29(5):357–372
Friesz TL, Bernstein D et al (1993) A variational inequality formulation of the dynamic network user equilibrium problem. Oper Res 41(1):179–191
Immers BH, Oosterbaan N (1991) Model calculation of environment-friendly traffic flows in urban networks. Transp Res Rec 1312:33–41
Johansson O (1997) Optimal road-pricing: simultaneous treatment of time losses, increased fuel consumption, and emissions. Transp Res Part D: Transp Environ 2(2):77–87
Johansson-Stenman O (2006) Optimal environmental road pricing. Econ Lett 90(2):225–229
Karoonsoontawong A, Waller S (2010) Integrated network capacity expansion and traffic signal optimization problem: robust bi-level dynamic formulation. Netw Spat Econ 10(4)):525–550
Kotsialos A, Papageorgiou M (2004) Efficiency and equity properties of freeway network-wide ramp metering with AMOC. Transp Res Part C Emerg Techn 12(6):401–420
Larsson T, Patriksson M (1995) An augmented lagrangean dual algorithm for link capacity side constrained traffic assignment problems. Transp Res B Methodol 29(6):433–455
Larsson T, Patriksson M (2004) A column generation procedure for the side constrained traffic equilibrium problem. Transp Res B Methodol 38(1):17–38
Li Z, Lam WHK et al (2012) Environmentally sustainable toll design for congested road networks with uncertain demand. Int J Sustain Transp 6(3):127–155
Li Z, Wang Y et al (2013) Design of sustainable cordon toll pricing schemes in a monocentric city. Netw Spat Econ. doi:10.1007/s11067-013-9209-3
Lin X, Immers BH et al (2010) From environmental constraints to network-wide environment-friendly traffic patterns: Inverting the planning approach for sustainability. Paper presented at the 12th World Conference on Transport Research. Lisbon, Portugal
Lin X, Immers BH et al (2012) Evaluating the impact of environmental constraints in networks: formulation and analysis in a simple case. Paper presented at International Scientific Conference on Mobility and Transport. Munich, Germany
Ng MW, Lo HK (2013) Regional air quality conformity in transportation networks with stochastic dependencies: a theoretical copula-based model. Netw Spat Econ. doi:10.1007/s11067-013-9185-7
Park K (2011) Detecting Braess Paradox based on stable dynamics in general congested transportation networks. Netw Spat Econ 11(2):207–232
Proost S, Van Dender K (2001) The welfare impacts of alternative policies to address atmospheric pollution in urban road transport. Reg Sci Urban Econ 31(4):383–411
Rilett LR, Benedek CM (1994) Traffic assignment under environmental and equity objectives. Transp Res Rec 1443:92–99
Sheffi Y (1984) Urban transportation networks : equilibrium analysis with mathematical programming methods. Prentice-Hall, Englewood Cliffs. ISBN 0-13-939729-9
Smit R, Ntziachristos L et al (2010) Validation of road vehicle and traffic emission models—A review and meta-analysis. Atmos Environ 44(25):2943–2953
Szeto WY, Jaber X et al (2012) Road Network Equilibrium Approaches to Environmental Sustainability. Transp Rev Transl Transdiscipl J 32(4):491–518
Szeto WY, Jiang Y et al (2013) A sustainable road network design problem with land use transportation interaction over time. Netw Spat Econ. doi:10.1007/s11067-013-9191-9
Waller RE, Commins BT et al (1961) Air pollution in road tunnels. Br J Ind Med 18:250–259
Waller RE, Commins BT et al (1965) Air pollution in a city street. Br J Ind Med 22:128–138
Wang H, Fu L et al (2009) A bottom-up methodology to estimate vehicle emissions for the Beijing urban area. Sci Total Environ 407(6):1947–1953
Wang H, Fu L et al (2011) CO2 and pollutant emissions from passenger cars in China. Energy Pol 39(5):3005–3011
Wismans LJJ, Van Berkum EC et al (2011) Comparison of evolutionary multi objective algorithms for the dynamic network design problem. Paper presented at 2011 I.E. International Conference on Networking, Sensing and Control (ICNSC). Delft, the Netherlands
Wu Y, Wang R et al (2010) On-road vehicle emission control in Beijing: past, present, and future. Environ Sci Technol 45(1):147–153
Yang H, Bell MGH (1997) Traffic restraint, road pricing and network equilibrium. Transp Res B Methodol 31(4):303–314
Yang Z, Chen G et al (2008) Car ownership level for a sustainability urban environment. Transp Res Part D: Transp Environ 13(1):10–18
Yang H, Xu W et al (2010) Bounding the efficiency of road pricing. Transp Res Part E Logist Transp Rev 46(1):90–108
Yin YF (2002) Multiobjective bilevel optimization for transportation planning and management problems. J Adv Transp 36(1):93–105
Zachariadis T, Samaras Z (1999) An integrated modeling system for the estimation of motor vehicle emissions. J Air Waste Manage Assoc 49:1010–1026
Zegeye SK, De Schutter B et al (2010) Model predictive traffic control to reduce vehicular emissions—an LPV-based approach. 2010 American Control Conference. 2284–2289
Zhang YL, Lv JP et al (2010) Traffic assignment considering air quality. Transp Res Part D: Transp Environ 15(8):497–502
Zhang K, Batterman S et al (2011) Vehicle emissions in congestion: comparison of work zone, rush hour and free-flow conditions. Atmos Environ 45(11)):1929–1939
Zhong RX, Sumalee A et al (2011) Dynamic user equilibrium with side constraints for a traffic network: theoretical development and numerical solution algorithm. Transp Res B Methodol 45(7):1035–1061
Zhong RX, Sumalee A et al (2012) Dynamic marginal cost, access control, and pollution charge: a comparison of bottleneck and whole link models. J Adv Transp 46(3):191–221
Acknowledgments
This research is funded by SBA scholarship program, which is sponsored by KU Leuven. The authors would like to thank Jim Stada for his comments on this paper. We are also grateful to the reviewers for their very constructive comments.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lin, X., Tampère, C.M.J., Viti, F. et al. The Cost of Environmental Constraints in Traffic Networks: Assessing the Loss of Optimality. Netw Spat Econ 16, 349–369 (2016). https://doi.org/10.1007/s11067-014-9228-8
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11067-014-9228-8