
Abstract
Prediction of ground vibration induced by blasting operations is a crucial challenge to engineers working in surface mines. This study aims to assess the efficiency of two advanced machine learning models in predicting ground vibrations in a granite quarry located in Malaysia. To this end, two intelligent models were proposed by hybridizing the relevance vector regression (RVR) with the grey wolf optimization (GWO) (which formed the RVR-GWO model) and with the bat-inspired algorithm (BA) (which formed the RVR-BA model). To the best of our knowledge, this is the first attempt to predict ground vibration using the RVR-GWO and RVR-BA models. The afore-mentioned models were developed and tested using 95 datasets. Then, the performance of the developed models was statistically checked through four comparative experiments using, among others, mean square error (MSE) and correlation coefficient (R). The results indicated the superiority of the RVR-GWO model over the RVR-BA model in terms of prediction precision. The RVR-GWO model with R of 0.915 and MSE = 7.920 predicted the ground vibration better than the RVR-BA model with R of 0.867 and MSE = 8.551. Accordingly, it was concluded that applying the GWO algorithm to RVR can result in high accuracy in the prediction of blast-induced ground vibration.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
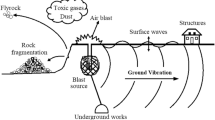
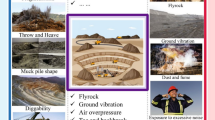
Blasting is a key technique adopted mostly in the civil and mining engineering fields for rock fragmentation purposes. The challenging issue is that, in each blasting event, only around 20% of the generated energy is applied to rock fragmentation and the rest of the energy brings about different adverse impacts on surrounding environment and structures, for instance, ground vibration, flyrock and airblast (e.g., Hajihassani et al. 2014, 2018a, b; Matidza et al. 2020; Chen et al. 2019). The phenomena induced by blasting are illustrated in Figure 1. Among the induced adverse effects of blasting, ground vibration is recognized as the most destructive impact because it typically causes structural vibrations, demolition of buildings, instability of bench and slope, and in some cases, significant damage to underground water (e.g., Monjezi et al. 2010, 2011, 2013; Khandelwal et al. 2011; Ghasemi et al. 2013; Saadat et al. 2014; Hajihassani et al. 2015; Abbas and Asheghi 2018). Ground vibration is generally measured based on peak particle velocity (PPV). Accordingly, to minimize the impact of blasting events on the environment and structures, there is a need to accurately estimate blast-induced PPV.

Blasting-induced phenomenon
Different experiments and techniques have been proposed by different researchers to estimate PPV induced by blasting. The experimental studies were aimed generally at establishing empirical equations based on relationships between distance of PPV measurement (D) and explosive charge per blasting delay (W) (Ghosh and Daemen 1983; Roy 1991). However, these empirical equations have provided low-quality prediction accuracy in several cases; therefore, artificial intelligence (AI)-based techniques have received more attention in recent years. Numerous researchers (e.g., Monjezi et al. 2009; Zhou et al. 2015; Nikafshan Rad et al. 2018; Zhou et al. 2019a, b, c) have applied different AI methods to solve different problems in engineering fields, and they have become popular in the prediction of PPV.
Artificial neural network (ANN) was employed by Monjezi et al. (2013) to estimate PPV. The results obtained by ANN were compared with those of empirical models, which revealed that ANN was more efficient than the rivals regarding the task defined. In another study, Hasanipanah et al. (2017) presented the classification and regression tree (CART) for predicting PPV. They also developed multiple regression (MR) and several empirical models for the same purpose. Their findings confirmed the superiority of CART over MR and empirical models regarding the PPV estimation. With the same objective, Zhang et al. (2019) made use of an optimized XGBoost to estimate PPV. They used particle swarm optimization (PSO) to optimize XGBoost parameters. To check the acceptability of the model, they also employed some empirical models. Their results revealed that PSO-XGBoost outperformed the empirical models in regard to PPV estimation. Bui et al. (2020) integrated the quantile regression neural network (QRNN) and the fuzzy C-means clustering (FCM) for predicting PPV. Their results obtained by the FCM-QRNN model were compared to those of the random forest (RF) and ANN. The comparative results confirmed the superiority of FCM-QRNN over the others in estimating PPV.
Jiang et al. (2019) examined the capacity of a neuro-fuzzy inference system for prediction of PPV and made a comparison with the results of the MR model. The neuro-fuzzy inference system delivered more accurate results than MR. Nguyen et al. (2020) tested the capability of a hybridized model integrating the ANN and k-means clustering algorithm (HKM) in PPV estimation. They also used classical ANN, support vector regression (SVR), HKM and hybridized form of SVR and empirical models in their study. Their findings revealed that the proposed HKM-ANN achieved performed better in forecasting PPV compared to the other models noted above. Fang et al. (2020a) hybridized the imperialist competitive algorithm (ICA) with M5Rules to estimate PPV. Their results confirmed higher efficiency of ICA-M5Rules in comparison with other models in PPV prediction. For the same goal, Ding et al. (2020) offered the ICA to optimize XGBoost parameters. They also made use of SVR, ANN and gradient boosting machine (GBM). Their results showed that ICA-XGBoost outperformed the ANN, SVR and GBM methods in terms of PPV estimation. Yang et al. (2020b) hybridized SVR with optimization algorithms such as the genetic and firefly algorithms. Based on their results, the firefly-SVR model provided more acceptable predictions for PPV. In a study by Li et al. (2020), a biogeography-based optimization algorithm was combined with ANN. They showed that the proposed model outperformed the extreme learning machine and ANN. Amiri et al. (2020) used another strategy for optimizing ANN. In this regard, they used the itemset mining algorithm and demonstrated its superiority in this field. Yang et al. (2020a) predicted PPV using ANFIS combined with genetic algorithm (GA) and PSO. According to their results, both GA and PSO were useful algorithms for improving the ANFIS performance. Shang et al. (2020) combined the ANN and firefly algorithm (FA) to predict PPV. They indicated the effectiveness of ANN-FA model in the field. A combination of cubist algorithm (CA) and GA was proposed by Fang et al. (2020b) to predict PPV. They compared the performance of the proposed model with several machine learning methods. Their results showed the superiority of CA-GA model over other models. Yu et al. (2020c) offered an advanced relevance vector machine method for predicting PPV and concluded the acceptability of the proposed method. In the same purpose, a modified PSO algorithm was combined with extreme learning machine by Jahed Armaghani et al. (2020). Their results revealed the modified PSO-extreme learning machine method was perfectly able in predicting the PPV.
A review of literature shows that optimization algorithms, especially the particle swarm optimization algorithm, are becoming increasingly popular for PPV prediction. These algorithms have demonstrated high capacity in improving the effectiveness of predictive models. This has been considered only for ANN and XGBoost models. However, there is a need for innovative hybridized models in the field of engineering to mitigate the destructive impacts that blasting operations in a mine may exert on surrounding environment. The present study attempted to expand the body of knowledge by proposing the relevance vector regression (RVR) optimized by grey wolf optimization (GWO) (the RVR-GWO model) and by bat-inspired algorithm (BA) (the RVR-BA model) for predicting blast-induced PPV.
Field Investigation
A comprehensive research was carried out in the Harapan Ramai granite quarry, located in Johor, Malaysia, to measure and predict PPV. Geographically, the quarry is situated at latitude \(1^\circ 30^{'} 42^{''} {\text{N}}\) and longitude \(103^\circ 50^{'} 54^{''} {\text{S}}\). This quarry has the capacity of producing almost 40,000 tons of granite monthly. In the excavation operations, the drilling-and-blasting method is generally used to displace and fragment rock mass. In the Harapan Ramai project, dynamite and ANFO are used as the main explosives. Blast holes are drilled usually with a diameter of 150 mm. After charging the blast holes with explosive material, fine gravels were used as stemming material. In each blasting operation, values of W, burden-to-spacing ratio (B/S), stemming length (SL) and D are measured. Additionally, values of PPV in each blasting event are measured and recorded using the VibraZEB seismograph. To measure D, the GPS (global positioning system) is used; with this instrument, distances between blast-points and the VibraZEB seismograph are carefully measured. More details regarding the datasets used in this study are mentioned in the next sections.
Models Explanation
In this part, the review of literature related to the RVR is presented; then, the GWO and BA are explained. Optimization improves the performance of the RVR model by selecting the optimal value of its parameters.
Relevance Vector Regression
The RVR proposed by Tipping (2001) is a probabilistic method that works based on the Bayesian approach. It does not need to predict the error/margin tradeoff parameter C, which can decrease the time and the kernel function, and it does not need to satisfy the Mercer condition. Due to the RVR advantages over the SVR approach, RVR has been applied increasingly to regression prediction problems in recent years (Fang et al. 2015; Fang and Su 2020). With RVR, which assumes that the model is single-output (t) multiple-input (x), \(\left\{ {x_{n} ,t_{n} } \right\}_{n = 1}^{N} ,\) the output \(t = \left( {t_{1} , \ldots ,t_{N} } \right)^{T}\) can be represented as the sum of a vector \(y = \left( {y(x_{1} ), \ldots ,y(x_{N} )} \right)^{T}\). The target output is defined as:
where e signifies random noise and w is a weight vector. The y(x) function is defined as:
where \(\varPhi \left( x \right) = \left[ {1,K\left( {x,x_{1} } \right),K\left( {x,x_{2} } \right), \ldots ,K\left( {x,x_{N} } \right)} \right]\). The target output can then be written as \(p\left( {t_{n} \left| {x_{n} } \right.} \right) = N\left( {t\left| {y(x_{n} ),\sigma^{2} } \right.} \right)\). The likelihood can be given as:
where \(w = \left( {w_{0} ,w_{1} , \ldots ,w_{N} } \right)\,\), \(\,t = \left( {t_{1} ,t_{2} , \ldots ,t_{N} } \right)\) and \(\varPhi\) is the \(N \times \left( {N + 1} \right)\) design matrix. Thus, the RVR method adopts a Bayesian perspective and constrains (w and \(\sigma^{2}\)), thus:
where a is a N + 1 hyper-parameter, b = \(\sigma^{2}\), and gamma \(\left( {\alpha \left| {a,b} \right.} \right)\) is defined as
In addition, the posterior over weights can be given as:
where \(A = {\text{diag}}\left( {\alpha_{1} ,\alpha_{2} , \ldots ,\alpha_{N} } \right)\) and the likelihood distribution can be given as:
where the covariance is given by \(C = \sigma^{ - 2} I + \varPhi A^{ - 1} \varPhi^{T}\). Detailed description of the RVR method has been provided in the literature (e.g., Geem et al. 2001; Fang et al. 2019).
Various fields of study make use of the RVR model for prediction purposes. In order to examine rock mass boreability, the RVR model was developed by Fattahi (2020a). In other studies, Fattahi (2020b, c) used the RVR model to predict the unconfined compressive strength and penetration rate of tunnel boring machines and found the effectiveness of RVR for prediction purposes especially in the mining and geotechnical fields.
Bat-Inspired Algorithm
The BA is an optimization algorithm suggested by Yang (2010). It is inspired by the echo-location behaviors of microbats. The ith bat flies randomly with position xi at velocity νi with a fixed frequency fi. It varies its loudness A0 and wavelength λ to search for prey. The frequency, positions and velocity of the bats are updated (Ansari and Gholami 2015). The best selected current solution can be given as:
where ρ∈[− 1,1] and At denote the average loudness. In addition,
Note that ri and Ai are updated during the algorithm operation procedure. A detailed description of the BA can be found in Yang (2010). Moreover, Figure 2 presents the flowchart of the BA. In this study, we adopted the BA for selection of appropriate variables RVR in order to increase the runtime efficiency of RVR-BA.

Flowchart of BA
The acceptability and reliability of the BA have been investigated by many researchers. For instance, Saba et al. (2017) predicted time and intensity of future earthquakes using a combination of ANN and BA. Additionally, hybridizing ANN with BA was used to predict air travel demand in a study carried out by Mostafaeipour et al. (2018). In another research, Chen et al. (2019) used the BA in data-driven mineral prospectivity mapping. The findings of the afore-mentioned studies indicate effectiveness of BA for optimization purposes.
Grey Wolf Optimization Algorithm
The GWO is a new population-based algorithm proposed by Mirjalili et al. (2014). It is inspired by grey wolves’ behavior in nature. In this algorithm, four groups are defined: omega, alpha, delta and beta. Moreover, the three hunting steps (i.e., encircling prey, attacking prey and searching for prey) are simulated. In the GWO, some parameters need to be set in numbers, namely delta, the number of sites selected for neighborhood search, the stopping criterion, the maximum number of iterations, beta, initialization of alpha and the number of search agents. A detailed description of the GWO has been provided in the literature by Mirjalili et al. (2014, 2016). Figure 3 presents a flowchart of the GWO. In the current study, the GWO was used to select the appropriate parameters of RVR model.

Flowchart of GWO
The potential of the GWO has been highlighted in many studies. Xu et al. (2020) offered it for optimizing SVR in approximating shear strength and unconfined compressive strength of rock. In another study, Gao et al. (2020) developed the GWO to predict peak shear strength of rock. The application of GWO was also investigated by Yu et al. (2020b) for optimizing the SVR parameters for evaluation of rock movement induced by blasting events in mines. Recently, Shariati et al. (2020) predicted compressive strength of concrete using a hybrid of the GWO and extreme learning machine. The afore-mentioned studies confirmed that GWO can be used as a powerful algorithm for optimizing purposes.
RVR Optimized by BA and GWO
An epsilon RVR model with the radial basis kernel function is defined with some parameters, on which its performance depends greatly. In this paper, the GWO and BA are applied as optimizers for the hyper-parameters of RVR. Typically, RVR is hybridized separately with GWO and BA, and the prediction result achieved by a GWO- or BA-hybridized RVR acts as a fitness function evaluation. The optimized hyper-parameters of the RVR can be obtained after the specified maximum iteration number has been reached. Regulated parameters for running the GWO and BA are presented in Tables 1 and 2, respectively.
In this paper, the objective function was served by the root mean squared error (RMSE); the lower the RMSE, the higher the estimation accuracy. The RMSE can be defined as:
where a and p denote actual and predicted values. The procedure of optimizing the RVR variables with GWO and BA is presented in Figure 4.

Optimization of RVR parameters using GWO and BA
Prediction of ppv using RVR-GWO and RVR-BA
In this section, the implementations of the RVR-GWO and RVR-BA models based on the prepared database are explained briefly.
Database
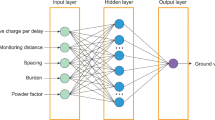
For RVR-GWO and RVR-BA modeling, 95 datasets were collected and divided into two subsets: 75 datasets were allotted for training the models and 20 datasets for testing and verifying the constructed models. The input parameters were W, B/S, SL, and D parameters, and the output parameter was PPV. The elementary statistics of datasets used in this study are presented in Table 3. In addition, the ranges of the parameters implemented in the modeling processes are shown in Figure 5 and summarized as follows:

Information about the variables in the database
-
W parameter: 33%, 16%, 23% and 28% of the whole data were between 0–350, 350–450, 450–550 and 550–650 kg, respectively.
-
B/S parameter: 22%, 34%, 29% and 15% of the whole data were between 0–0.8, 0.8–0.83, 0.83–0.86 and 0.86–0.9, respectively.
-
SL parameter: 13%, 21%, 34% and 32% of the whole data were between 0–2.5, 2.5–4.5, 4.5–6.5 and 6.5–8 m, respectively.
-
D parameter: 16%, 11%, 39% and 34% of the whole data were between 0–150, 150–250, 250–350 and 350–450 m, respectively.
-
PPV parameter: 19%, 37%, 35% and 9% of the whole data were between 0–8, 8–14, 14–25 and 25–34 mm/s, respectively.
Pre-processing of Data and Evaluation of Model Performance
To improve the stability of training of the RVR-BA and RVR-GWO models, both output and input data need to be normalized. In this study, all data were converted into values in the range [0, 1] using the following equation:
where x, xmin, xmax and xM are values to be normalized, minimum value, maximum value and normalized values, respectively.
To evaluate model performance, the correlation coefficient (R), mean squared error (MSE), mean absolute percentage error (MAPE) and variance account for (VAF) were used as measures of accuracy. MSE, R, MAPE and VAF could be defined, respectively, as follows (e.g., Rezaei et al. 2011; Fattahi 2015a, b; Mostafaeipour et al. 2018; Mehrdanesh et al. 2019; Hasanipanah et al. 2018a, b, 2020a, b, c, d; Gao et al. 2020; Jing et al. 2020; Ramezanalizadeh et al. 2020a, b; Yu et al. 2020a; Zhou et al. 2020):
where a, p and n are actual value, predicted value and observations number, respectively.
Results and Discussion
In this study, the RVR-GWO and RVR-BA models were proposed to predict PPV. The results obtained from the comparative experiments (MSE, R, MAPE and VAF) on these two hybrid intelligence models are listed in Table 4. It is worth mentioning that the lowest MSE and MAPE, and the highest R and VAF are the most ideal results. Table 4 shows that, in the testing phase, the RVR-GWO model (with R = 0.915, MSE = 7.920, MAPE = 15.343 and VAF = 83.476%) is more accurate than the RVR-BA model (with R = 0.867, MSE = 8.551, MAPE = 16.109 and VAF = 75.012%) in predicting PPV. In addition, a correlation between the estimated and measured PPV for all 76 data points is depicted in Figure 6. This figure indicates the RVR-GWO model possessed a superior predictive capacity over the RVR-BA model for predicting PPV because a very close agreement was obtained between the measured and predicted PPV. Moreover, comparison of PPV estimated by the RVR-BA and RVR-GWO models and the measured PPV for all 76 data points is depicted in Figures 7 and 8, respectively. Furthermore, the Taylor diagram related to predictive models related to all data points is shown in Figure 9. These figures and Table 4 show that the RVR-GWO and RVR-BA models were able to successfully estimate PPV; however, the RVR-GWO performed better than the RVR-BA in both training and testing datasets.

Plots of estimated PPV versus measured PPV: (a) RVR-BA; (b) RVR-GWO

Errors of PPV estimation for training datasets using: (a) RVR-BA; (b) RVR-GWO

Errors of PPV estimation for testing datasets using: (a) RVR-BA; (b) RVR-GWO

Taylor diagram for all data points
Conclusions
Ground vibration induced by blasting is a major concern in surface mines because it can cause damage to nearby structures. Therefore, predicting ground vibration is a practical need, especially for safety issues. The objective of this study was the development of two advanced machine learning models to predict ground vibration in the Harapan Ramai granite quarry located in Malaysia. To do so, the RVR-BA and RVR-GWO models were developed. Totally, 95 sets of data were used to develop the two models. Then, the performances of the developed models were checked through comparative experiments using MSE, R, MAPE and VAF%. The main conclusions of the research are the following:
-
The proposed RVR-GWO model was more effective and robust than the proposed RVR-BA model in predicting ground vibration. This confirms the effectiveness of the GWO in optimizing the RVR performance and its capacity for generalization.
-
The proposed RVR-GWO model can be addressed as a powerful tool for the prediction of other phenomena induced by mine blasting such as flyrock and air-overpressure.
-
For future research, it is interesting to develop the RVR model optimized with other metaheuristic algorithms such as water wave optimization, wind-driven optimization, simplified swarm optimization, shark smell optimization, sine cosine algorithm, locust swarm algorithm, krill herd algorithm, etc.
References
Abbas, A. S., & Asheghi, R. (2018). Optimized developed artificial neural network-based models to predict the blast-induced ground vibration. Innovative Infrastructure Solutions, 3, 1–10.
Amiri, M., Hasanipanah, M., & Bakhshandeh Amnieh, H. (2020). Predicting ground vibration induced by rock blasting using a novel hybrid of neural network and itemset mining. Neural Computing and Applications. https://doi.org/10.1007/s00521-020-04822-w.
Ansari, H. R., & Gholami, A. (2015). An improved support vector regression model for estimation of saturation pressure of crude oils. Fluid Phase Equilibr, 402, 124–132.
Bui, X., Choi, Y., Atrushkevich, V., Nguyen, H., Tran, Q. H., Long, N. Q., et al. (2020). Prediction of blast-induced ground vibration intensity in open-pit mines using unmanned aerial vehicle and a novel intelligence system. Natural Resources Research, 29, 771–790.
Chen, W., Hasanipanah, M., Rad, H. N., Armaghani, D. J., & Tahir, M. M. (2019). A new design of evolutionary hybrid optimization of SVR model in predicting the blast-induced ground vibration. Engineering with Computers. https://doi.org/10.1007/s00366-019-00895-x.
Ding, Z., Nguyen, H., Bui, X. N., Zhou, J., & Moayedi, H. (2020). Computational intelligence model for estimating intensity of blast-induced ground vibration in a mine based on imperialist competitive and extreme gradient boosting algorithms. Natural Resources Research, 29(2), 751–769.
Fang, Y., & Su, Y. (2020). On the use of the global sensitivity analysis in the reliability-based design: Insights from a tunnel support case. Computers and Geotechnics, 117, 103280.
Fang, Q., Zhang, D., Li, Q., & Wong, L. N. Y. (2015). Effects of twin tunnels construction beneath existing shield-driven twin tunnels. Tunnelling and Underground Space Technology, 45, 128–137.
Fang, Y., Su, Y., Su, Y., & Li, S. (2019). A direct reliability-based design method for tunnel support using the performance measure approach with line search. Computers and Geotechnics, 107, 89–96.
Fang, Q., Nguyen, H., Bui, X. N., & Nguyen-Thoi, T. (2020a). Prediction of blast-induced ground vibration in open-pit mines using a new technique based on imperialist competitive algorithm and M5Rules. Natural Resources Research, 29(2), 791–806.
Fang, Q., Nguyen, H., Bui, X., & Tran, Q. H. (2020b). Estimation of blast-induced air overpressure in quarry mines using cubist-based genetic algorithm. Natural Resources Research, 29, 593–607.
Fattahi, H. (2015a). Indirect estimation of deformation modulus of an in situ rock mass: An ANFIS model based on grid partitioning, fuzzy c-means clustering and subtractive clustering. Geosciences Journal, 20(5), 681–690.
Fattahi, H. (2015b). Prediction of slope stability state for circular failure: A hybrid support vector machine with harmony search algorithm. International Journal of Optimization in Civil Engineering, 5(1), 103–115.
Fattahi, H. (2020a). Analysis of rock mass boreability in mechanical tunneling using relevance vector regression optimized by dolphin echolocation algorithm. International Journal of Optimization in Civil Engineering, 10(3), 481–492.
Fattahi, H. (2020b). A new method for forecasting of uniaxial compressive strength of weak rocks. Journal of Mining and Environment, 11(2), 505–515.
Fattahi, H. (2020c). Tunnel boring machine penetration rate prediction based on relevance vector regression. International Journal of Optimization in Civil Engineering, 9(2), 343–353.
Gao, J., Nait Amar, M., Motahari, M. R., Hasanipanah, M., & Jahed Armaghani, D. (2020). Two novel combined systems for predicting the peak shear strength using RBFNN and meta-heuristic computing paradigms. Engineering with Computers. https://doi.org/10.1007/s00366-020-01059-y.
Geem, Z. W., Kim, J. H., & Loganathan, G. V. (2001). A new heuristic optimization algorithm: Harmony search. Simulation, 76(2), 60–68.
Ghasemi, E., Ataei, M., & Hashemolhosseini, H. (2013). Development of a fuzzy model for predicting ground vibration caused by rock blasting in surface mining. Journal of Vibration and Control, 19(5), 755–770.
Ghosh, A., & Daemen, J. J. (1983) A simple new blast vibration predictor (based on wave propagation laws). In The 24th US symposium on rock mechanics (USRMS). American Rock Mechanics Association.
Hajihassani, M., Jahed Armaghani, D., Marto, A., & Tonnizam Mohamad, E. (2014). Ground vibration prediction in quarry blasting through an artificial neural network optimized by imperialist competitive algorithm. Bulletin of Engineering Geology and the Environment, 74, 873–886.
Hajihassani, M., Armaghani, D. J., Monjezi, M., Mohamad, E. T., & Marto, A. (2015). Blast-induced air and ground vibration prediction: A particle swarm optimization-based artificial neural network approach. Environmental Earth Sciences, 74(4), 2799–2817.
Hasanipanah, M., & Amnieh, H. B. (2020a). A fuzzy rule-based approach to address uncertainty in risk assessment and prediction of blast induced Flyrock in a quarry. Natural Resources Research, 29(2), 669–689.
Hasanipanah, M., & Amnieh, H. B. (2020b). Developing a new uncertain rule-based fuzzy approach for evaluating the blast-induced backbreak. Engineering with Computers. https://doi.org/10.1007/s00366-019-00919-6.
Hasanipanah, M., Faradonbeh, R. S., Amnieh, H. B., Armaghani, D. J., & Monjezi, M. (2017). Forecasting blast-induced ground vibration developing a CART model. Engineering with Computers, 33(2), 307–316.
Hasanipanah, M., Armaghani, D. J., Amnieh, H. B., Koopialipoor, M., & Arab, H. (2018a). A risk-based technique to analyze flyrock results through rock engineering system. Geotechnical and Geological Engineering, 36(4), 2247–2260.
Hasanipanah, M., Bakhshandeh Amnieh, H., Arab, H., & Zamzam, M. S. (2018b). Feasibility of PSO–ANFIS model to estimate rock fragmentation produced by mine blasting. Neural Computing and Applications, 30(4), 1015–1024.
Hasanipanah, M., Keshtegar, B., Thai, D., & Trung, N. T. (2020a). An ANN-adaptive dynamical harmony search algorithm to approximate the flyrock resulting from blasting. Engineering with Computers. https://doi.org/10.1007/s00366-020-01105-9.
Hasanipanah, M., Meng, D., Keshtegar, B., Trung, N. T., & Thai, D. K. (2020b). Nonlinear models based on enhanced Kriging interpolation for prediction of rock joint shear strength. Neural Comput & Applic. https://doi.org/10.1007/s00521-020-05252-4.
Jahed Armaghani, D., Kumar, D., Samui, P., Hasanipanah, M., & Roy, B. (2020). A novel approach for forecasting of ground vibrations resulting from blasting: Modified particle swarm optimization coupled extreme learning machine. Engineering with Computers. https://doi.org/10.1007/s00366-020-00997-x.
Jiang, W., Arslan, C. A., Tehrani, M. S., Khorami, M., & Hasanipanah, M. (2019). Simulating the peak particle velocity in rock blasting projects using a neuro-fuzzy inference system. Engineering with Computers, 35(4), 1203–1211.
Jing, H., Rad, H. N., Hasanipanah, M., Armaghani, D. J., & Qasem, S. N. (2020). Design and implementation of a new tuned hybrid intelligent model to predict the uniaxial compressive strength of the rock using SFS-ANFIS. Engineering Computations. https://doi.org/10.1007/s00366-020-00977-1.
Khandelwal, M., Kumar, D. L., & Yellishetty, M. (2011). Application of soft computing to predict blast-induced ground vibration. Engineering with Computers, 27(2), 117–125.
Li, G., Kumar, D., Samui, P., Nikafshan Rad, H., Roy, B., & Hasanipanah, M. (2020). Developing a new computational intelligence approach for approximating the blast-induced ground vibration. Applied Sciences, 10(2), 434.
Matidza, M. I., Jianhua, Z., Gang, H., Gang, H., & Mwangi, A. D. (2020). Assessment of blast-induced ground vibration at Jinduicheng Molybdenum open pit mine. Natural Resources Research, 29, 831–841.
Mehrdanesh, A., Monjezi, M., & Sayadi, A. R. (2019). Evaluation of effect of rock mass properties on fragmentation using robust techniques. Engineering with Computers, 34(2), 253–260.
Mirjalili, S., Mirjalili, S. M., & Lewis, A. (2014). Grey wolf optimizer. Advanced Engineering Software, 69, 46–61.
Mirjalili, S., Saremi, S., Mirjalili, S. M., & Coelho, L. D. S. (2016). Multi-objective grey wolf optimizer: A novel algorithm for multi-criterion optimization. Expert Systems with Applications, 47, 106–119.
Monjezi, M., Rezaei, M., & Yazdian Varjani, A. (2009). Prediction of rock fragmentation due to blasting in Gol-E-Gohar iron mine using fuzzy logic. International Journal of Rock Mechanics and Mining Sciences, 46, 1273–1280.
Monjezi, M., Ahmadi, M., Sheikhan, M., Bahrami, A., & Salimi, A. (2010). Predicting blast-induced ground vibration using various types of neural networks. Soil Dynamics and Earthquake Engineering, 30(11), 1233–1236.
Monjezi, M., Ghafurikalajahi, M., & Bahrami, A. (2011). Prediction of blast-induced ground vibration using artificial neural networks. Tunnelling and Underground Space Technology, 26(1), 46–50.
Monjezi, M., Hasanipanah, M., & Khandelwal, M. (2013). Evaluation and prediction of blast-induced ground vibration at Shur River Dam, Iran, by artificial neural network. Neural Computing and Applications, 22(7–8), 1637–1643.
Mostafaeipour, A., Goli, A., & Qolipour, M. (2018). Prediction of air travel demand using a hybrid artificial neural network (ANN) with Bat and Firefly algorithms: a case study. J Supercomput, 74, 5461–5484.
Nikafshan Rad, H., Hasanipanah, M., Rezaei, M., & Eghlim, A. L. (2018). Developing a least squares support vector machine for estimating the blast-induced flyrock. Engineering with Computers, 34(4), 709–717.
Ramezanalizadeh, T., Monjezi, M., Sayadi, A. R., & Mousavi, A. (2020a). Development of a MIP model to maximize NPV and minimize adverse environmental impact—a heuristic approach. Environmental Monitoring and Assessment, 192(9), 1–15.
Ramezanalizadeh, T., Monjezi, M., Sayadi, A. R., & Mousavinogholi, A. (2020b). Development of an integrated mathematical model to optimize waste rock dumping satisfying environmental aspects. Journal of Mining and Environment, 11(2), 577–586.
Rezaei, M., Monjezi, M., & Varjani, A. Y. (2011). Development of a fuzzy model to predict flyrock in surface mining. Safety Science, 49(2), 298–305.
Roy, P. P. (1991). Vibration control in an opencast mine based on improved blast vibration predictors. Mining Science and Technology, 12(2), 157–165.
Saadat, M., Khandelwal, M., & Monjezi, M. (2014). An ANN-based approach to predict blast-induced ground vibration of Gol-E-Gohar iron ore mine. Iran. Journal of Rock Mechanics and Geotechnical Engineering, 6(1), 67–76.
Saba, S., Ahsan, F., & Mohsin, S. (2017). BAT-ANN based earthquake prediction for Pakistan region. Soft Computing, 21, 5805–5813.
Shang, Y., Nguyen, H., Bui, X., Tran, Q. H., & Moayedi, S. (2020). A novel artificial intelligence approach to predict blast-induced ground vibration in open-pit mines based on the firefly algorithm and artificial neural network. Natural Resources Research, 29, 723–737.
Shariati, M., Mafipour, M. S., Ghahremani, B., Azarhomayun, F., Ahmadi, M., Trung, N. T., et al. (2020). A novel hybrid extreme learning machine–grey wolf optimizer (ELM-GWO) model to predict compressive strength of concrete with partial replacements for cement. Engineering with Computers. https://doi.org/10.1007/s00366-020-01081-0.
Tipping, M. E. (2001). Sparse Bayesian learning and the relevance vector machine. Jounal of Machine Learning Research, 1, 211–244.
Xu, C., Nait Amar, M., Ghriga, M. A., Ouaer, H., Zhang, X., & Hasanipanah, M. (2020). Evolving support vector regression using Grey Wolf optimization; forecasting the geomechanical properties of rock. Engineering with Computers. https://doi.org/10.1007/s00366-020-01131-7.
Yang, X. S. (2010). A new metaheuristic bat-inspired algorithm. In J. R. González, D. A. Pelta, C. Cruz, G. Terrazas, & N. Krasnogor (Eds.), Nature inspired cooperative strategies for optimization (NICSO 2010) (pp. 65–74). Berlin: Springer.
Yang, H., Hasanipanah, M., Tahir, M. M., & Bui, D. T. (2020a). Intelligent prediction of blasting-induced ground vibration using ANFIS optimized by GA and PSO. Natural Resources Research, 29, 739–750.
Yang, H., Nikafshan Rad, H., Hasanipanah, M., Bakhshandeh Amnieh, H., & Nekouie, A. (2020b). Prediction of vibration velocity generated in mine blasting using support vector regression improved by optimization algorithms. Natural Resources Research, 29, 807–830.
Yu, Z., Shi, X., Qiu, X., Zhou, J., Chen, X., & Gou, Y. (2020a). Optimization of postblast ore boundary determination using a novel sine cosine algorithm-based random forest technique and Monte Carlo simulation. Engineering Optimization. https://doi.org/10.1080/0305215X.2020.1801668.
Yu, Z., Shi, X., Zhou, J., Chen, X., Miao, X., Teng, B., et al. (2020b). Prediction of blast-induced rock movement during bench blasting: Use of gray wolf optimizer and support Vector regression. Natural Resources Research, 29, 843–865.
Yu, Z., Shi, X., Zhou, J., Gou, Y., Huo, X., Zhang, J., et al. (2020c). A new multikernel relevance vector machine based on the HPSOGWO algorithm for predicting and controlling blast-induced ground vibration. Engineering with Computers. https://doi.org/10.1007/s00366-020-01136-2.
Zhang, X., Nguyen, H., Bui, X. N., Tran, Q. H., Nguyen, D. A., Tien Bui, D., et al. (2019). Novel soft computing model for predicting blast-induced ground vibration in open-pit mines based on particle swarm optimization and XGBoost. Natural Resources Research, 29, 711–721.
Zhou, J., Li, X., & Mitri, H. S. (2015). Comparative performance of six supervised learning methods for the development of models of hard rock pillar stability prediction. Natural Hazards, 79(1), 291–316.
Zhou, J., Aghili, N., Noroozi Ghaleini, E., Tien Bui, D., Tahir, M. M., & Koopialipoor, M. (2019a). A Monte Carlo simulation approach for effective assessment of flyrock based on intelligent system of neural network. Engineering with Computers. https://doi.org/10.1007/s00366-019-00726-z.
Zhou, J., Li, E., Yang, S., Wang, M., Shi, X., Yao, S., et al. (2019b). Slope stability prediction for circular mode failure using gradient boosting machine approach based on an updated database of case histories. Safety Science, 118, 505–518.
Zhou, J., Nekouie, A., Arslan, C. A., Pham, B. T., & Hasanipanah, M. (2019c). Novel approach for forecasting the blast induced AOp using a hybrid fuzzy system and firefly algorithm. Engineering with Computers. https://doi.org/10.1007/s00366-019-00725-0.
Zhou, J., Chen, C., Du, K., Armaghani, D. J., & Li, C. (2020). A new hybrid model of information entropy and unascertained measurement with different membership functions for evaluating destressability in burst-prone underground mines. Engineering with Computers. https://doi.org/10.1007/s00366-020-01151-3.
Acknowledgments
The authors would like to thank Dr. Jahed Armaghani for providing the information and facilities required for conducting this research.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Fattahi, H., Hasanipanah, M. Prediction of Blast-Induced Ground Vibration in a Mine Using Relevance Vector Regression Optimized by Metaheuristic Algorithms. Nat Resour Res 30, 1849–1863 (2021). https://doi.org/10.1007/s11053-020-09764-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11053-020-09764-7