
Abstract
In this article, an optimal design of two-dimensional finite impulse response digital differentiators (2-D FIR-DD) with quadrantally odd symmetric impulse response is presented. The design problem of 2-D FIR-DD is formulated as an optimization problem based on the \(L_1\)-error fitness function. The novel error fitness function is based on the \(L_1\) norm which is unique and is liable to produce a flat response. This design methodology incorporates advantages of \(L_1\)-error approximating function and cuckoo-search algorithm (CSA) which is capable of attaining a global optimal solution. The optimized system coefficients are computed using \(L_1\)-CSA and performance is measured in terms of magnitude response, phase response, absolute magnitude error and elapsed time. Simulation results have been compared with other optimization algorithms such as real-coded genetic algorithm and particle swarm optimization and it is observed that \(L_1\)-CSA delivers optimal results for 2-D FIR-DD design problem. Further, performance of the \(L_1\)-CSA based 2-D FIR-DD design is evaluated in terms of absolute magnitude error and algorithm execution time to demonstrate their effect with variation in the control parameters of CSA.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Two-dimensional finite impulse response digital differentiators (2-D FIR-DD) are extensively used in the field of signal processing, control systems, image processing, biomedical engineering and in many other practical applications (Cichocki and Amari 2002; Lee 1980; Chu et al. 1988; Pan et al. 2007). With this wide range of applications, design of 2-D differentiators gained great attention of the practitioners in recent years. The frequency response of an ideal 2-D differentiator is defined as
where, \(\omega _1, \omega _2\) are the frequency components in two dimensions.
The conventional method for designing of digital systems (differentiators, integrators and filters) involves two approaches, namely, the interpolation and approximation based techniques. These techniques have demonstrated their abilities to deal with the design of 1-D and 2-D digital filters in the available literature (Rawat 2015; Lin and Vaidyanathan 1996; Tzafestas 1986; Aggarwal et al. 2015; Dhabal and Venkateswaran 2015; Tseng and Lee 2014; Lai 2007; Hinamoto and Doi 1996; Bhattacharya and Antoniou 1999; Shyu et al. 2014; Lu and Hinamoto 2011; Kockanat and Karaboga 2015; Aggarwal et al. 2016a). Previous studies in 1-D digital differentiator design focusses on the interpolation and approximation based approaches (Tseng and Lee 2008; Al-Alaoui 2011; Gupta et al. 2011; Upadhyay and Singh 2011; Gupta et al. 2014; Gupta and Yadav 2014; Kumar and Rawat 2015a; Jalloul and Al-Alaoui 2015). In recent years, design trends for the 1-D digital differentiator has been shifted towards the approximation based approaches, especially involving the optimization methods. Significant research in this field has been cited by several researchers and practitioners. Upadhyay and Singh introduced the design of recursive digital differentiator and integrator using pole-zero method (Upadhyay and Singh 2011). Gupta and Yadav proposed a new particle swarm optimization (PSO) algorithm for designing of the differentiators, integrators and fractional order differentiators (Gupta and Yadav 2014; Gupta et al. 2014). In 2015, Kumar and Rawat introduced optimal design of the fractional order differentiators using genetic algorithm (GA) and cuckoo-search algorithm (CSA) (Kumar and Rawat 2015a). Jalloul and Al-Alaoui applied PSO for further optimization of the existing coefficients of digital differentiators and integrators (Jalloul and Al-Alaoui 2015). Incorporation of optimization algorithms provides more flexibility and accuracy to the differentiator design problem (Kumar et al. 2015b, a).
With the successful implementation of approximation based approaches in the 1-D digital differentiator design problems, recently these techniques have been applied for designing of 2-D digital differentiators. In particular, approximation algorithms are being successfully applied for solving the 2-D differentiator design problem. Tseng and Lee designed the 2-D FIR digital filters and differentiators using fractional derivative constraints based on the gradient-search optimization (Tseng and Lee 2013). Here, quadrantally odd symmetric system coefficients are computed using the least-squares technique and Lagrange multiplier approach. This method provides large design flexibility. In addition, Tzeng designed a 2-D FIR-DD with quadrantally symmetric properties using the evolutionary optimization, GA (Tzeng 2004). The above studies motivate researchers to design 2-D FIR-DD using metaheuristic optimization techniques to improve the efficiency and performance of differentiators. However, most of the metaheuristic algorithms encounter the challenges of premature convergence, sub-optimal solutions, large number of parameter tuning and computational complexity. Nevertheless, CSA has the potential to overcome these limitations and provide robust solutions (Yang 2014) in many engineering applications like fractional order differentiator design (Kumar and Rawat 2015a), fractional delay filter design (Kumar and Rawat 2015b), feedback system identification (Patwardhan et al. 2014), optimal filter designing (Aggarwal et al. 2016c), structure optimization (Gandomi et al. 2013) and many more.
In this paper, a new algorithm is developed using the capabilities of CSA and properties of the \(L_1\)-error approximation for designing of 2-D FIR-DD. The integration of CSA and the \(L_1\)-error approximation leads to higher design flexibility and accuracy which provides the global optimal solution with a flat response in the passband (Aggarwal et al. 2015, 2016b). The rationale behind the proposed \(L_1\)-CSA is to introduce flatness in the response of the 2-D FIR-DD design leading to better performance in terms of magnitude error. To validate the superiority of the proposed \(L_1\)-CSA compared to \(L_1\)-PSO and \(L_1\)-real coded genetic algorithm (\(L_1\)-RCGA), a set of simulations have been carried out. Magnitude response, phase response, absolute magnitude error and elapsed time are the performance measures to evaluate the efficiency of the proposed method. Furthermore, optimal values of the filter coefficients are obtained by performing an exhaustive search with a different set of control parameters of CSA. The elapsed time and a small magnitude error observed for the proposed algorithm guarantees the practical applicability of the designed 2-D FIR-DD within the given time frame.
Rest of the paper is organized as follows: In Sect. 2, design problem of the 2-D FIR-DD with quadrantally odd symmetric impulse response is explained as an optimization problem. CSA is briefly introduced for designing of the 2-D FIR-DD in Sect. 3. Further, in Sect. 3, theoretical analysis of CSA with other metaheuristic algorithms is presented. Simulation results are discussed in Sect. 4. Performance evaluation of CSA for designing of the 2-D FIR-DD with respect to its control parameters is also presented in Sect. 4. Finally, the paper is concluded in Sect. 5.
2 Problem formulation
In this section, design problem of the 2-D FIR-DD is formulated by approximating the magnitude response of a 2-D FIR system to the magnitude response of an ideal 2-D differentiator, given in Eq. (1). Transfer function of a linear phase 2-D FIR system is given by
with \(z_1 = e^{j\omega _1} , z_2 = e^{j\omega _2}\), \(N_1,N_2\) are order of the system in each dimension, and \(h(n_1,n_2)\) is the impulse response. A quadrantally odd symmetric impulse response satisfies the following condition.
Thus, the impulse response is an \((2N_1+1) \times (2N_2+1)\) matrix with the quadrantally odd symmetric system coefficients with \(h(n_1,0)=0\) and \(h(0,n_2)=0\). The frequency response of the 2-D FIR system with quadrantally odd symmetric impulse response is given by
where, the amplitude response, \(\widetilde{H}(\omega _1,\omega _2)\) is written as
and the system coefficients, \(a(n_1,n_2)\) are given by
Next, the lexicographic ordering is used to map the 2-D response in 1-D (Tseng and Lee 2013) and the amplitude response can be rewritten as
where \(L = N_1N_2\), the coefficient vector \(\mathbf q _m = a(n_1,n_2)\) and \(\mathbf v _m(\omega _1,\omega _2) = \sin (n_1\omega _1) \sin (n_2\omega _2)\) with \(m = (n_2 -1)N_1 + n_1\). The amplitude response is written in the matrix form as
where, the two column vectors are defined as
and
Now, design problem of the 2-D FIR-DD approaches to an optimization problem. Our objective is to compute the optimal system parameters, \(\mathbf {b}\), such that the difference between the amplitude response, \(\widetilde{H}(\omega _1,\omega _2)\) and the ideal response, \(D(\omega _1,\omega _2)\) is minimum. The error objective function is defined as
The error objective function, \(\tilde{E}\) is minimized over the complete frequency band in the two dimensions. The fitness function is chosen in the \(L_1\)-sense, that is, the absolute magnitude of the error between the desired differentiator and the designed FIR system response. This \(L_1\)-error approximation yields more flatness in the passband of the system response (Grossmann and Eldar 2007; Aggarwal et al. 2016a) and thus, achieves a flat wideband response.
3 Employed algorithm
This section briefly introduces the cuckoo-search algorithm employed for designing of the 2-D FIR-DD. Further, in this section, implementation of the 2-D FIR-DD with CSA is compared with other metaheuristic algorithms, such as RCGA and PSO. Tuning of control parameters for CSA, PSO and RCGA is also explained. Simulation results of \(L_1\)-CSA are compared with the \(L_1\)-RCGA and \(L_1\)-PSO in the following section.
3.1 Cuckoo-search algorithm
CSA is a mathematical conceptualization which simulates the breeding capabilities of the cuckoo birds, developed in 2009 (Yang and Deb 2009; Yang et al. 2013). It is based on the unique parasitism behavior of some cuckoo bird species in combination with the Lévy flight which improves their local search capabilities with random walk. These bird species aggressively reproduce and lay their eggs in the nests of other birds. The host birds sometimes either belligerently throw away the foreign eggs or simply abandon their nests and build a new nest in a new location. In CSA, each cuckoo egg in the host’s nest symbolizes to a potential solution of the design problem. Each solution is characterized by its fitness value with an objective to exchange a low fitness value solution with a better solution iteratively. In the process of generating a new solution, the concept of random walk is performed by Lévy flights. In this, the next step of the random walk is based on the current location (solution) and the transition probability to the next location.
3.1.1 Mathematical compilation of cuckoo-search algorithm
Three guiding rules are developed to simplify the algorithm. (i) Each bird is allowed to lay only one egg at once, which is randomly placed among the host bird’s nests. (ii) The nest with highest quality eggs (solutions with high fitness values) will be carried over to the next generation. (iii) A predetermined number of host nests are available in which the probability of identification of alien eggs by host birds is fixed (\(P_a \in [0,1]\)). If \(P_a=0.25\), 1 / 4 of the search time is fixed for the exploitation process and the rest for exploration of the search space for global solution. This guarantees the global optimality condition with higher probability. In the instance of discovery, the host bird can either throw the alien egg or abandon the nest.
This algorithm is formulated for optimal results, balancing between exploration and exploitation in the search space. An exploiting local random walk and the explorative global random walk is performed using the controlling parameter \(P_a\). The local search capabilities of CSA are enhanced by using the following solution update equation, given by
where \(\mathbf a _i\) is the solution vector at the lth iteration given by ith nest. \(\mathbf a ^l_j\) and \(\mathbf a ^l_k\) are the location of the two different solutions selected randomly at the lth iteration. \(\delta \) (\(\delta > 0\)) is the step size that determines the distance of the random walk. If \(\delta \) is too big, then \(\mathbf a ^{l+1}\) will be too far away from \(\mathbf a ^{l}\) and if \(\delta \) is too small, then \(\mathbf a ^{l+1}\) will be very close to \(\mathbf a ^l\) to be of any importance. H(x) is a unit step function and \(\epsilon \) is uniformly distributed random number. Here, \(\otimes \) symbolizes for the entry-wise product of two vectors.
While generating new solutions, the Lévy flight is performed for the exploration process. It is a Markov chain in which the next step depends on the current location and the transition probability, given by
where \(\hbox {L}\acute{\mathrm{e}}\hbox {vy}(\lambda )\) is adopted from the Lévy distribution with an infinite variance and infinite mean with \(1 < \lambda \le 3\) (Yang and Deb 2009). This enables the generation of a substantial fraction of new solutions far from the current best solution, thus avoiding the algorithm to be trapped in local minima.

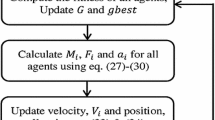
Flowchart for the \(L_1\)-CSA based 2-D FIR-DD design method
3.1.2 The 2-D FIR-DD design using CSA
The steps adopted for the implementation of CSA for the 2-D FIR-DD design problem are summarized. The error objective function (the \(L_1\)-error approximated fitness function) defined in Eq. (10) for designing of the 2-D FIR-DD is evaluated at each iteration for all possible solutions. The optimal solution of this problem is to achieve the \((2N_1+1) \times (2N_2+1)\) matrix with the quadrantally odd symmetric system coefficients in order to design the \(N_1\)th, \(N_2\)th order 2-D FIR system. This is ensured by specifying the condition of symmetry on the coefficients to be optimized which states that \(h(n_1,n_2) = -h(-n_1,n_2) = -h(n_1,-n_2) = h(-n_1,-n_2), \,-N_1 \le n_1 \le N_1,\, -N_2 \le n_2 \le N_2\). With this, the designed system features the linear phase response. The flow chart of CSA for the 2-D FIR-DD design problem is depicted in Fig. 1.
The parameter values of population size, lower and upper limit of the optimized solution are selected after many simulation runs for best results.
-
Step 1 Initialize the population size of host nests, \(n_c = 25\), probability of discovering the alien eggs, \(P_a = 0.25\) and the lower and upper bounds of the system coefficients, -1, +1 for the 2-D FIR-DD. Set the maximum number of iterations, \(N=1000\) to explore the search space.
-
Step 2 Randomly generate an initial population of \(n_c\) host nests, which individually represents a candidate solution (impulse response of the 2-D FIR-DD) as variable \(\mathbf b \). The variable \(\mathbf b \) represents the \((2N_1+1) \times (2N_2+1)\) matrix of the 2-D system coefficients to be optimized.
-
Step 3 Compute fitness of the initial randomly generated nest, \(F^l\) (error objective function given in Eq. (10) at the lth iteration).
-
Step 4 Generate a new nest using the Lévy flights given in Eq. (12) and evaluate its fitness \(F^{l+1}\). Compare the fitness values.
-
Step 5 For minimization if \(F^{l+1} < F^l\), initial host nests \(\mathbf a ^l\) is replaced with new nests, \(\mathbf a ^{l+1}\) generated by Lévy flight.
-
Step 6 Eliminate nests with the worst fitness values depending on the probability, \(P_a = 0.25\) and build new nests.
-
Step 7 New solutions are built using Eq. (11) to perform the intensification process and increase the exploitation potency of the algorithm.
-
Step 8 Compute fitness of all the new nests and update the best nest \(\mathbf a _b\) of the generation.
-
Step 9 Repeat steps 2-8, until the stopping criterion (maximum number of iterations) is met and the best nest obtained \(\mathbf a _b\) are the optimal 2-D system coefficients. These optimum coefficients are employed for designing of the 2-D FIR-DD.

Magnitude response of an ideal 2-D FIR digital differentiator

Magnitude response of 2-D FIR digital differentiator using \(L_1\)-RCGA
3.2 Analysis of RCGA, PSO and CSA for the design of 2-D FIR-DD
In this section, employed algorithms are compared on the basis of their exploitation and exploration capabilities, controlling parameter selection, computational complexity and convergence rate. The technique RCGA provides diversity (exploration) for new solutions with crossover and mutation, however, the mutation may drift away the solutions with converged characteristics. The selection process in RCGA is the essence for algorithm convergence by selecting only the fitter solutions and discarding the unfit solutions gradually. The PSO algorithm mainly consists of the mutation and selection processes which provide the exploration capability with high mobility in the particles. The use of gbest variable has an advantage of the high speed of convergence as well as the disadvantage of premature convergence since it can mislead if the global optimal solution is not selected. Finally, the CSA is observed to be advantageous over RCGA as well as PSO with its exploitation and exploration capabilities. It has been proven in the past research that RCGA and PSO are incapable to guarantee global convergence of the algorithms (Yang 2014; Yang et al. 2013). Whereas, the updating equation (Eq. 12) of the CSA can satisfy the global convergence requirements and thus premature convergence is avoided. Moreover, the local search and global search in CSA is controlled by \(P_a\) with which a balance is maintained between these characteristics to achieve good performance. The efficiency of CSA is highly improved with the Lévy flight exploration as compared to standard random walks. Furthermore, the complexity of the algorithms is estimated through their execution time (compared in the next section) and the application of CSA demonstrates a fast convergence with shorter algorithm execution time as compared to RCGA and PSO.

Magnitude error of 2-D FIR digital differentiator using \(L_1\)-RCGA

Phase response of 2-D FIR digital differentiator using \(L_1\)-RCGA

Magnitude response of 2-D FIR digital differentiator using \(L_1\)-PSO
3.3 Tuning of control parameters
The setting of algorithm control parameters is a challenging task. It is itself an optimization problem and performance of the algorithm can be greatly influenced for a specific problem. Intrinsically, there is no explicit method available in the literature for the fine tuning of parameters. Researchers perform extensive simulations with different sets of parameter values within their specified range. Thus, similar methodology is employed in this work while performing loads of simulations with slight variations in the control parameters’ values within the specified range provided in the literature (Yang 2014).
In this paper, parameters of each algorithm are chosen after multiple simulations within the range suggested in the previous literatures. The control parameters for all the algorithms selected for the filter design process are given in Table 1.

Magnitude error of 2-D FIR digital differentiator using \(L_1\)-PSO

Phase response of 2-D FIR digital differentiator using \(L_1\)-PSO
4 Simulation results and discussions
Simulations are carried out in MATLAB using Intel Core i5, 2.53 GHz, 4 GB RAM. Performance of the \(L_1\)-CSA based 2-D FIR-DD is evaluated in terms of the magnitude response, \(L_1\)-error (absolute magnitude error), elapsed time and is compared with the designs using \(L_1\)-RCGA and \(L_1\)-PSO. The order of the differentiator, \(N_1, N_2\) is selected to be 15. The results reported here are obtained as best after performing around 100 simulation trails with random alterations in the parameters. The optimal solution is recorded with a minimum fitness value. A set of simulations have been performed for selecting the control parameters of the employed algorithms which are listed in Table 1. In order to ensure fairness in the operation of the heuristic algorithms, the desired differentiator specifications were kept the same and the algorithm specific parameters were fixed according to the recommended settings.
The magnitude response of the ideal 2-D digital differentiator with respect to \(\omega _1, \omega _2\) is shown in Fig. 2. Three metaheuristic algorithms are implemented for designing of the 2-D FIR-DD. The absolute magnitude response of the \(L_1\)-RCGA based 2-D FIR-DD is plotted in Fig. 3. It shows a close approximation with an absolute magnitude error of 1.3169 with respect to the ideal response, given in Table 2. Figure 4 shows the absolute magnitude error with respect to the two frequency components. The \(L_1\)-RCGA based 2-D FIR-DD yields a linear phase and the phase plot is shown in Fig. 5.
The absolute magnitude response of the \(L_1\)-PSO based 2-D FIR-DD using the is presented in Fig. 6. The graphical appearance reveals a better approximation of the response as compared to the \(L_1\)-RCGA differentiator with the absolute magnitude error of 0.9561, reported in Table 2. The absolute magnitude error of the 2-D differentiator is plotted in Fig. 7. Further, the phase response is shown in Fig. 8. The absolute magnitude response of the \(L_1\)-CSA based 2-D FIR-DD is shown in Fig. 9. A clear conclusion can be drawn from the displayed graphics that the proposed \(L_1\)-CSA technique yields the best results with an absolute magnitude error of 0.1678. The plot for the magnitude error and the phase response are shown in Figs. 10 and 11, respectively. The values of the mean absolute error (computed with 100 simulation results) and standard deviation are reported in Table 2. The inference is that the proposed \(L_1\)-CSA yields the best results. Comparison of the convergence profile for the design of 2-D differentiator is plotted in Fig. 12. It demonstrates that \(L_1\)-CSA possesses the fastest convergence rate and converges to a minimum value as compared to other employed algorithms.

Magnitude response of 2-D FIR digital differentiator using \(L_1\)-CSA

Magnitude error of 2-D FIR digital differentiator using \(L_1\)-CSA

Phase response of 2-D FIR digital differentiator using \(L_1\)-CSA

Comparison of fitness profile for the design of 2-D FIR digital differentiator using \(L_1\)-RCGA, \(L_1\)-PSO and \(L_1\)-CSA
Further, Fig. 13 shows the percentage improvement in the form of bar chart. The improved performance of the designed 2-D FIR-DD using \(L_1\)-CSA is demonstrated over the performance of differentiators designed using \(L_1\)-RCGA and \(L_1\)-PSO. The \(L_1\)-error computed with \(L_1\)-CSA is improved by 87.26 and 82.45 % over \(L_1\)-RCGA and \(L_1\)-PSO, respectively. In terms of algorithm elapsed time, \(L_1\)-CSA shows an improvement of 31.66 and 14.37 % over \(L_1\)-RCGA and \(L_1\)-PSO, respectively. Thus, \(L_1\)-CSA yields least error with fast convergence.

Percentage improvement in \(L_1\)-CSA over PSO and RCGA
4.1 Performance evaluation of \(L_1\)-CSA for the design of 2-D FIR digital differentiators
In order to measure performance of the \(L_1\)-CSA based 2-D FIR-DD, exhaustive simulations are carried out while varying the control parameters of CSA. CSA is known to have only two major controlling parameters, with varying characteristics, the population size, N and the probability of discovering alien eggs, \(P_a\). Variation in \(P_a\) and N, may lead to small changes in the performance of the algorithm. Thus, to evaluate the performance of CSA, simulations are performed with varying parameter values \(P_a=0.25, 3.0, 3.5, 4.0\) and \(N=25, 30, 40, 50\). The \(L_1\)-error values obtained with these variations are reported in Table 3. It is observed from Table 3 that the least magnitude error of 0.1678 is ensured with \(P_a=0.25\) and \(N=25\). Apart from this, with \(P_a=0.25\), the magnitude error increases with N. In addition, it can be inferred from Table 3, that with fixed \(P_a\), the magnitude error increases with the population size.
Further, in Table 4 the algorithm elapsed time is evaluated with the varying control parameters. The observations are similar, with \(P_a=0.25\) and \(N=25\) fastest convergence is obtained in 24.44 s (per 100 iterations). Moreover, conclusions can be made that with the increase in the population size with fixed \(P_a\), the algorithm execution time is increased. Figure 14 depicts the percentage improvement graph of \(L_1\)-CSA with \(P_a=0.25\) and \(N=25\) over simulations with \(P_a=0.25\) and \(N=30, 40, 50\) in terms of the \(L_1\)-error and algorithm elapsed time. Thus, the best combination of control parameters of \(L_1\)-CSA with \(P_a=0.25\) and \(N=25\) leads to the optimal results for designing of the 2-D FIR-DD.

Percentage improvement in CSA with \(P_a=0.25, N=25\) over varied N
5 Conclusion
An optimal design of 2-D FIR-DD is presented in this article. The 2-D differentiators are widely used in the field of signal and image processing. The design of 2-D FIR-DD is formulated as an optimization problem with an aim to minimize the \(L_1\)-error function. The proposed method successfully incorporates the advantages of both, CSA and the \(L_1\)-error approximation. The cuckoo-search algorithm is employed for an efficient design of the 2-D FIR-DD, which effectively searches for the global results with a fast convergence rate. CSA optimizes the fitness function based on the \(L_1\)-error approximation, which yields a flat response. The results of 2-D FIR-DD using \(L_1\)-CSA are compared with those of \(L_1\)-PSO and \(L_1\)-RCGA. The graphical comparison with the corresponding results of \(L_1\)-PSO and \(L_1\)-RCGA confirms that the proposed \(L_1\)-CSA is much more effective and accurate for the 2-D FIR-DD design. Absolute magnitude error, standard deviation and elapsed time are the parameters considered to prove the efficiency of the proposed \(L_1\)-CSA method. Simulations with different set of parameters have been performed to assess the performance of the \(L_1\)-CSA based 2-D FIR-DD with change in the parameter values. Further, the proposed method needs to be explored in future work, for the design of 2-D filters and 2-D fractional order differentiator.
References
Aggarwal, A., Kumar, M., Rawat, T. K., & Upadhyay, D. K. (2016a). Optimal design of 2D FIR filters with quadrantally symmetric properties using fractional derivative constraints. Circuits, Systems, and Signal Processing, 35(6), 2213–2257.
Aggarwal, A., Rawat, T. K., Kumar, M., & Upadhyay, D. K. (2016b). Design of optimal band-stop FIR filter using \(L_1\)-norm based RCGA. Ain Shams Engineering Journal. doi:10.1016/j.asej.2015.11.022.
Aggarwal, A., Rawat, T. K., Kumar, M., & Upadhyay, D. K. (2015). Optimal design of FIR high pass filter based on \(L_1\) error approximation using real coded genetic algorithm. Enggineeing Science and Technology, An International Journal, 18(4), 594–602.
Aggarwal, A., Rawat, T. K., & Upadhyay, D. K. (2016c). Design of optimal digital FIR filters using evolutionary and swarm optimization techniques. AEU-International Journal of Electronics and Communications, 70, 373–385.
Al-Alaoui, M. A. (2011). Class of digital integrators and differentiators. IET Signal Processing, 5(2), 251–260.
Bhattacharya, D., & Antoniou, A. (1999). Design of 2-D FIR filters by a feedback neural network. Multidimensional Systems and Signal Processing, 10(3), 319–330.
Chu, C. H., Delp, E. J., & Buda, A. J. (1988). Detecting left ventricular endocardial and epicardial boundaries by digital two-dimensional echocardiography. IEEE Transactions on Medical Imaging, 7(2), 81–90.
Cichocki, A., & Amari, S. I. (2002). Adaptive blind signal and image processing: Learning algorithms and applications (Vol. 1). Hoboken: Wiley.
Dhabal, S., & Venkateswaran, P. (2015). A novel accelerated artificial bee colony algorithm for optimal design of two dimensional FIR filter. Multidimensional Systems and Signal Processing. doi:10.1007/s11045-015-0352-5
Gandomi, A. H., Yang, X. S., & Alavi, A. H. (2013). Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Engineering with Computers, 29(1), 17–35.
Grossmann, L. D., & Eldar, Y. C. (2007). An \(L_1\)-method for the design of linear-phase FIR digital filters. IEEE Transactions on Signal Processing, 55(11), 5253–5266.
Gupta, M., Jain, M., & Kumar, B. (2011). Recursive wideband digital integrator and differentiator. International Journal of Circuit Theory and Applications, 39, 775–782.
Gupta, M., Relan, B., Yadav, R., & Aggarwal, V. (2014). Wideband digital integrators and differentiators designed using particle swarm optimization. IET Signal Processing, 8(6), 668–679.
Gupta, M., & Yadav, R. (2014). New improved fractional order differentiator models based on optimized digital differentiators. The Scientific World Journal. doi:10.1155/2014/741395.
Hinamoto, T., & Doi, A. (1996). A technique for the design of 2-D recursive digital filters with guaranteed stability. Multidimensional Systems and Signal Processing, 7(2), 225–237.
Jalloul, M. K., & Al-Alaoui, M. A. (2015). Design of recursive digital integrators and differentiators using particle swarm optimization. International Journal of Circuit Theory and Applications. doi:10.1002/cta.2115.
Kockanat, S., & Karaboga, N. (2015). The design approaches of two-dimensional digital filters based on meta-heuristic optimization algorithms: A review of the literature. Artificial Intelligence Review, 44(2), 265–287.
Kumar, M., & Rawat, T. K. (2015a). Optimal design of FIR fractional order differentiator using cuckoo search algorithm. Expert Systems with Applications, 42, 3433–3449.
Kumar, M., & Rawat, T. K. (2015b). Optimal fractional delay-IIR filter design using cuckoo search algorithm. ISA Transactions, 59, 39–54.
Kumar, M., Rawat, T. K., Jain, A., Singh, A. A., & Mittal, A. (2015a). Design of digital differentiators using interior search algorithm. Procedia Computer Science, 57, 368–376.
Kumar, M., Rawat, T. K., Singh, A. A., Mittal, A., Jain, A. (2015b). Optimal design of wideband digital integrators using gravitational search algorithm. In International conference on international conference on computing, communication and automation (ICCCA), pp. 1314–1319.
Lai, X. (2007). Design of smallest size two-dimensional linear-phase FIR filters with magnitude error constraint. Multidimensional Systems and Signal Processing, 18(4), 341–349.
Lee, J. S. (1980). Digital image enhancement and noise filtering by use of local statistics. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2, 165–168.
Lin, Y. P., & Vaidyanathan, P. P. (1996). Theory and design of two-dimensional filter banks: A review. Multidimensional Systems and Signal Processing, 7(3–4), 263–330.
Lu, W. S., & Hinamoto, T. (2011). Two-dimensional digital filters with sparse coefficients. Multidimensional Systems and Signal Processing, 22(1–3), 173–189.
Pan, B., Xie, H., Guo, Z., & Hua, T. (2007). Full-field strain measurement using a two-dimensional Savitzky–Golay digital differentiator in digital image correlation. Optical Engineering, 46(3), 033601–033601.
Patwardhan, A. P., Patidar, R., & George, N. V. (2014). On a cuckoo search optimization approach towards feedback system identification. Digital Signal Processing, 32, 156–163.
Rawat, T. K. (2015). Digital signal processing (1st ed.). New Delhi: Oxford Publication.
Shyu, J. J., Pei, S. C., Huang, Y. D., & Chen, Y. S. (2014). A new structure and design method for variable fractional-delay 2-D FIR digital filters. Multidimensional Systems and Signal Processing, 25(3), 511–529.
Tseng, C. C., & Lee, S. L. (2008). Design of digital differentiator using difference formula and richardson extrapolation. IET Signal Processing, 2(2), 177–188.
Tseng, C. C., & Lee, S. L. (2013). Designs of two-dimensional linear phase FIR filters using fractional derivative constraints. Signal Processing, 93(5), 1141–1151.
Tseng, C. C., & Lee, S. L. (2014). Designs of fractional derivative constrained 1-D and 2-D FIR filters in the complex domain. Signal Processing, 95, 111–125.
Tzafestas, S. G. (1986). Multidimensional systems, techniques and applications. New York: Marcel Dekker.
Tzeng, S. T. (2004). Genetic algorithm approach for designing 2-D FIR digital filters with 2-D symmetric properties. Signal Processing, 84(10), 1883–1893.
Upadhyay, D. K., & Singh, R. K. (2011). Recursive wide band digital differentiators and integrators. Electronic Letters, 47(11), 647648.
Yang, X. S. (2014). Nature-inspired optimization algorithms. Amsterdam: Elsevier.
Yang, X. S., Cui, Z., Xiao, R., Gandomi, A. H., & Karamanoglu, M. (2013). Swarm intelligence and bio-inspired computation: Theory and applications (1st ed.). Amsterdam: Elsevier.
Yang, X. S., Deb, S. (2009). Cuckoo search via lvy flights. In Proceeding of world congress on nature and biologically inspired computing, IEEE Publications, pp. 210–214.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Aggarwal, A., Kumar, M., Rawat, T.K. et al. Optimal design of 2-D FIR digital differentiator using \(L_1\)-norm based cuckoo-search algorithm. Multidim Syst Sign Process 28, 1569–1587 (2017). https://doi.org/10.1007/s11045-016-0433-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11045-016-0433-0