
Abstract
This paper deals with one-point collision with friction in three-dimensional, simple non-holonomic multibody systems. With Keller’s idea regarding the normal impulse as an independent variable during collision, and with Coulomb’s friction law, the system equations of motion reduce to five, coupled, nonlinear, first order differential equations. These equations have a singular point if sticking is reached, and their solution is ‘navigated’ through this singularity in a way leading to either sticking or sliding renewal in a uniquely defined direction. Here, two solutions are presented in connection with Newton’s, Poisson’s and Stronge’s classical collision hypotheses. One is based on numerical integration of the five equations. The other, significantly faster, replaces the integration by a recursive summation. In connection with a two-sled collision problem, close agreement between the two solutions is obtained with a few summation steps.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
This paper deals with one-point, ‘hard’ collision with friction in three-dimensional (3D), simple non-holonomic multibody systems, using classical collision theories (alternate approaches involving restoring and dissipative forces, also called ‘soft’ approach, and finite-element-based approach, also called full-deformation approach, described, e.g., by Chatterjee and Ruina in [1] and by Najafabadi et al. in [2], will not be discussed here). Djerassi has shown in [3] that, as far as two-dimensional (2D) systems are concerned, an algebraic, closed form, Poisson’s and Stronge’s hypotheses-related solutions always exist, and are unique, coherent, and energy-consistent.
Unfortunately, this is not the case with collision in 3D systems. If Keller’s idea [4] and Coulomb’s friction law are applied to the solution of collision problems, one obtains a set of five, coupled, nonlinear, first order differential equations, which has a singular point if sticking is reached. Solutions with analytic integrals exist only in special cases (e.g., in the absence of friction, as in [5] and [6], or if the ‘reduced’ 3×3 mass matrix is diagonal [7]). Battle shows in [8] that for what he calls ‘balanced collision’, solutions can be obtained with the integration of a single differential equation, that the remaining unknowns can be evaluated algebraically; and that sliding renewal cannot occur. He shows that, for a given system and collision points, the hodographs (describing the sliding relative velocity components of the colliding points versus one another) spanned by the collision initial conditions are continuous, unique and nonintersecting curves.
Thus, 3D collision problems require in general the solution of the five differential equations, investigated in depth by a small number of authors. Bhatt and Koechling [9] used Keller’s idea ([4]) to formulate the differential equations governing 3D collision of a rigid body hitting a plane, pointing out the singularity encountered if sticking occurs; and, showed that, depending on the coefficient of friction, either sticking prevails, or sliding is resumed in a constant, predictable direction. Battle [10] exploits the mathematical similarity between the description of the hodograph and an autonomous nonlinear flow, and, without solving the associated differential equations, draws a picture of the hodograph behavior during the sliding phase of the collision, and its dependence on five system parameters and on the coefficient of friction. Stronge [11] formulated the differential equations governing collisions between two bodies, and, introducing his coefficient of restitution, solved a number of examples (e.g., ball, rod, triangle and spherical pendulum hitting a plane). Zhen and Liu [12] formulated differential equations for 3D collision of holonomic systems using Keller’s idea, replacing the numerical integration with a difference method. They used a search algorithm to find the sliding direction if sliding resumption occurs.
It may be concluded that these authors provided the building blocks required to produce comprehensive solutions to the 3D, one point collision with friction problem for simple non-holonomic systems, a task undertaken in the present work. Two complete solutions are discussed, the first is based on the numerical integration of the indicated five differential equations, dealing with sliding, sticking and sliding renewal phases; and the second comprises a recursive summation associated with the first.
In both solutions, use is made of the classic collision hypotheses (by Newton [13], Poisson [14] and Stronge/Boulanger [11, 15], introducing, respectively, ‘kinematic’, ‘kinetic’ and ‘energetic’ coefficients of restitutions), a choice requiring elaborations in view of two observations related to these hypotheses. First, these hypotheses capture local effects, i.e., elastic and plastic deformations in the neighborhood of the colliding points. When applied to one point collision problems in multibody systems, they ’disregard’ the effect of the collision on the entire system (namely, on the rise of structural vibrations, friction in joints, restitution in the tangential direction, etc., as noted, e.g., in [16] and [1]), hence are not accurate. Second, Newton’s collision hypothesis can lead to an increase of the system mechanical energy (illustrated by Kane and Levinson in [17]). These observations gave rise to a number of newly defined hypotheses. For example, Chatterjee and Ruina augment in [1] Newton’s hypothesis with a tangential coefficient of restitution, which, among other features, improves the predictions of certain experimental results. Najafabadi et al. propose in [16] a new energy-related coefficient of restitution, which equals the square root of the ratio of the kinetic energy associated with the ‘constrained’ motion before and after the collision, better accommodating multibody systems. Rubin [18] discusses physical restrictions on the coefficient of restitution, concluding that it equals the ratio between the components of the velocity of separation and the velocity of approach in the impulse direction. Ivanov [19] arrives at a similar definition from an energy-related view-point.
In spite of their shortcomings, the classical hypotheses are widely used by numerous authors to conduct their studies. For example, Whittaker [5], Brach [20] and Smith [7] use Newton’s hypothesis, Routh [21], Keller [4] and Zen and Liu [12] use Poisson’s hypothesis, and Stronge [11], Hurmuzlu [22] and Djerassi [3] use Stronge/Boulanger’s hypothesis. Marghitu and Hurmuzlu [23], Smith and Liu [24], Ivanov [19] and others discuss all three hypotheses, showing that they lead to different results. It is understood, therefore, that a real-world problem requires calibration of the coefficient of restitution, validating its value for a limited parameter range (including, as shown by Stoianovici and Hurmuzlu in [25], geometrical ones). Incidentally, parameters associated with ‘soft’ approaches also require calibration (as e.g., in [26] and [27]). Accordingly, the analysis described here rests on the classical hypotheses. The paper starts with preliminaries (Sect. 2), followed by a presentation of the five differential equations and their solution in the events of sliding, sticking and sliding renewal (Sect. 3) in conjunction with the three classical hypotheses (Sect. 4). A 3D two-sled collision example is solved by integration in Sect. 5, and then by a recursive summation in Sect. 6. A short discussion in Sect. 7 concludes this work.
2 Preliminaries
Let
be Kane’s equations of motion for S, a simple, non-holonomic system of ν particles P i (i=1,…,ν) of mass m i , possessing p independent generalized speeds u 1,…,u p and n (n>p) generalized coordinates q 1,…,q n , where F r and \(F_{r}^{*}\) are, respectively, the rth generalized active force and the rth generalized inertia force for S (Kane and Levinson [17]). \(\mathbf{v}^{P_{i}}\), the velocity of P i in N, a Newtonian reference frame, can be expressed in terms of u 1,…,u p , q 1,…,q n and time t as
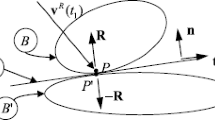
where \(\mathbf{v}_{r}^{P_{i}}\), called the rth partial velocity of P i , and \(\mathbf{v}_{t}^{P_{i}}\), called the remainder partial velocity of P i , are vector functions of q 1,…,q n and t. Let B and B′ be bodies of S, and let P be a point of B coming into contact with point P′ of B′ during the collision of B with B′ occurring between two instants t 1 and t 2 (Fig. 1). Under these circumstances, collision hypotheses [11, 13, 14] can be used to bring the effect of this collision into (1). To this end, let v R be the relative velocity of points P and P′, defined as
and note that v R can be written similarly to \(\mathbf{v}^{P_{i}}\) in (2), hence


where \(\mathbf{v}_{r}^{R}\) is the coefficient of u r in v R. Suppose that, during collision, P′ exerts on P a force R, so that P exerts on P′ a force −R. Then (1) give way to equations that bring into evidence the contributions of R, i.e.,
or, in view of (4a),
During the collision, P is assumed to maintain contact with P′, i.e., to coincide with P′; and a plane \(\tilde{S}\) exists which passes through P′ (≡P) and is tangent to B and B′ at P′ if both are locally smooth, or to B′ at P′ if only B′ is locally smooth. Name B and B′ such that n, a unit vector perpendicular to \(\tilde{S}\), makes v R(t 1)⋅n a non-positive quantity.

3D Collision; side (left) and top views on \(\tilde{S}\)
Align t, a unit vector lying in \(\tilde{S}\), with the projection of v R(t 1) on \(\tilde{S}\), making v R(t 1)⋅t a non-negative quantity (see Fig. 1) and v R(t 1)⋅s, where \(\mathbf{s}\hat{ =} \mathbf{n} \times \mathbf{t}\), vanish. Then




v R(t 1) and v R(t 2) (at times denoted v A and v S [17]) are called velocity of approach and velocity of separation, respectively. Equation (6) can thus be replaced with
If it is assumed that t 2−t 1 is ‘small’ compared to time constants associated with the motion of S, and that, consequently, q 1,…,q n and t remain constants between t 1 and t 2, then both sides of (8) can be integrated from t 1 to t≤t 2, yielding
Here, I n , I t and I s are the normal and tangential impulses at time t, defined as



\(\mathbf{v}_{r}^{R}\hat{ =} \mathbf{v}_{r}^{R}(t)\) (t 1≤t≤t 2,r=1,…,p) (see (4a)), Δu s (s=1,…,p) are defined as
and m rs is the entry in raw r, column s of the mass matrix −M associated with (1) (see (63), Appendix A). Note that n, t and s, defined only for t 1≤t≤t 2, remain fixed in N during the collision. Also note that R⋅n(t 1≤t≤t 2)>0 (P′ cannot ‘pull’ P), hence I n >0. The matrix form of (9), solved for Δu s (s=1,…,p) reads




Now, v R(t)−v R(t 1) can be written
when use is made of (2), (4a) and (4b). If both sides of (13) are dot-multiplied by n, t and s, one at a time, and if |Δu 1⋯Δu p | is eliminated with the aid of (12a), one has, defining \(\mathbf {V}\hat{ =} | \mathbf {V}_{n} \mathbf {V}_{t} \mathbf {V}_{s}|^{T}\) \((\Rightarrow \mathbf {V}^{T} = | \mathbf {V}_{n}^{T} \mathbf {V}_{t}^{T} \mathbf {V}_{s}^{T}|)\),
The coefficients of I n , I t and I s in (14) are functions of q 1,…,q n and t, hence remain constants between t 1 and t 2. Defining m nn , m nt , m tt , m ns , m ts and m ss as
v n , v t , v s , v n1, v t1, v s1, v n2, v t2 and v s2, the n, t and s components of v R at times t, t 1 and t 2, and I n2, I t2 and I s2, the n, t and s impulse components at time t 2, as
\((I_{n1}\hat{ =} I_{n}(t_{1}) = 0\), \(I_{t1}\hat{ =} I_{t}(t_{1}) = 0\), \(I_{s1}\hat{ =} I_{s}(t_{1}) = 0)\) one can rewrite (14) for t 1≤t≤t 2
(Equations (20)–(22) reduce to (22)–(23) in [28] for 2D systems; then m ts =m ns =m ss =0.) These so-called ‘reduced equations of motion’ possess a coefficient matrix \(\mathfrak{M}\) shown in Appendix A to be positive definite; and six unknowns I n , I t , I s , v n , v t and v s . Knowledge of I n2, I t2 and I s2 enables the evaluation of Δu 1(t 2)…Δu p (t 2) with (12a), with which simulations (i.e., numerical integrations of (1)) can be kept running. Accordingly, I n2, I t2 and I s2 are generated in the following sections first by integration and then by recursive summation, with the aid of friction- and collision-related hypotheses.
Regarding ΔE 2, the change in the system mechanical energy following a collision, a straightforward extension of the proof given in [28] for the planar case shows that
(\(= 1/2\mathbf {u}_{2}( - \mathbf {M})\mathbf {u}_{2}^{T} - 1/2\mathbf {u}_{1}( - \mathbf {M})\mathbf {u}_{1}^{T}\), where \(\mathbf {u}\hat{ =} | u_{1} \cdots u_{p} |\)) for the 3D case, provided
a condition ‘neutralizing’ specified motions implied by \(\mathbf {v}_{t}^{R}\) and \(\mathbf {v}_{t}^{P_{i}}\) (i=1,…,ν).
3 Solution by integration
One can start with the differential form of (20)–(22) given by
Let the slip speed s of P relative to P′ and the orientation angle ϕ be defined so that




where sϕ=sinϕ and cϕ=cosϕ (Fig. 1); and note that as long as there is slip R⋅t=−μ R⋅n cϕ, R⋅s=−μ R⋅n sϕ ([(R⋅t)2+(R⋅s)2]1/2=μ|R⋅n|), in accordance with Coulomb’s friction law, or, in view of (10a)–(10c),
where μ is Coulomb’s coefficient of friction. With f,g and h defined as
one can show, dividing (25)–(27) throughout by dI n and using (29), that
and that dv t and dv s can be eliminated from (25), (28b) and (28d), which reduce to





Equations (34a)–(34e) comprise five ordinary, coupled, first order differential equations with five dependent variables ϕ, s, v n , I t and I s and one, monotonously increasing, independent variable I n governing the sliding portion of the collision. The right-hand sides of (34a)–(34e) and their partial derivatives with respect to ϕ, s, v n , I t and I s , are continuous functions of ϕ, s, v n , I t and I s in the region s>0. Therefore, a solution of (34a)–(34e) in conjunction with the following initial conditions (when I n =0): ϕ(0)=0, s(0)=v t1 (then, by (28a)–(28d) v t (0)=s(0)=v t1, v s (0)=0), v n (0)=v n1, I t (0)=0 and I s (0)=0, always exists and is unique (see, e.g., [29], p. 267). Moreover, \(\mathrm {d}\Delta E = \mathbf {R}\cdot \mathbf {v}^{R}(t)\mathop{ =} \limits_{(7\mathrm{a}),(16)}(\mathbf {R}\cdot \mathbf{n}\mathbf{n} + \mathbf {R}\cdot \mathbf {t}\mathbf {t}+ \mathbf {R}\cdot \mathbf {s}\mathbf {s}) \cdot(v_{n}\mathbf {n}+ v_{t}\mathbf {t}+v_{s}\mathbf {s})\mathop{ =}\limits_{(10),(28\mathrm{a},\mathrm{c}),(29)}(v_{n} - \mu s)\mathrm {d}I_{n}\). With \(\mathrm{d}\Delta E_{n}\hat{ =} v_{n}\mathrm {d}I_{n}\), (34a)–(34e) can be augmented with the differential equations


enabling the evaluation of the ‘total’ and the ‘normal’ energy losses during collision.
It is worth noting that (23) is valid for t 1<t≤t 2 if ΔE 2, I n2, v t2, etc. are replaced with ΔE, I n , v t , etc.; then the I n derivative of both sides of (23) can be used to prove the validity of (35a) with the aid of (29), (34b)–(34e) and (20)–(22) in yet a different way. Moreover, d[1/2I n (v n +v n1)]/dI n ≠v n , hence ΔE n ≠1/2I n (v n +v n1). It can be shown this is also the case with 2D systems, except in sliding.
In general (34a)–(34e) cannot be integrated analytically (see, e.g., [9] and [11]). Furthermore, the ‘trivial’ solution ϕ≡0, valid for 2D problems, does not apply: ϕ≡0 implies dϕ/dI n =0; however, during sliding s>0, hence h(μ,ϕ)=0 (see (34a)). This equation has at least two nonzero solutions for ϕ (Appendix B), in contrast with the trivial solution.
Collisions comprise at least the first of the following events.
3.1 Sliding
Suppose that I n2, the normal impulse at t 2 is known, and that the sliding speed s remains positive throughout the integration of (34a)–(34e) from I n =0 to I n =I n2. Then integration underlies the solution for sliding, yielding ϕ(t 2), s(t 2)(>0) (hence, by (28a) and (28c) v t2 and v s2), v n2, I t2 and I s2.
3.2 Sticking
It may occur that s becomes zero, say, at t=t S <t 2, i.e., before I n =I n2. In that event h(μ,ϕ)→0 as s→0, provided g(μ,ϕ)<0; and vice versa. To show this, note that


hence
Moreover, \(\lim_{s \to 0}(\mathrm{d}v_{s}/\mathrm{d}v_{t})\mathop{ =}\limits_{(28\mathrm{b},\mathrm{d})}\lim_{s \to 0}[s(\phi)/c(\phi)]\), so that, with (37),

provided at least one solution \(\bar{\phi}\) of h(μ,ϕ)=0 satisfies \(g(\mu,\bar{\phi} )c^{2}\bar{\phi} \ne0\). In fact, when s(>0)→0 then necessarily ds/dI n <0, hence, by (34b), \(\lim_{s \to0 \Rightarrow\phi\to\bar{\phi}} g(\mu,\phi) < 0\), in agreement with Appendix B, showing that at least one such solution exists. Conversely, (34a) and (34b) can be condensed into
an equation which, when integrated from s=s(0) and ϕ=0 to s and ϕ yields \(s = s(0)\exp\int_{ 0}^{ \phi}g(\mu,\eta)/h(\mu,\eta)\,\mathrm{d}\eta\), showing that if \(\lim_{\phi\to \bar{\phi}} h(\mu,\phi) \to0\) (and, since \(\mathrm{d}\eta/h\mathop{ >}\limits_{(34\mathrm{a})}0\)) and \(\lim_{\phi\to\bar{\phi}} g(\mu,\phi)< 0\), then s(>0)→0 and sticking is approached.
During sticking, (25)–(27) remain valid with
yielding, when solved for dI n , dI t and dI s ,



where c n ,c t and c s are functions of m nn , m nt ,…,m ss given by




Equations (40a)–(40c) govern sticking just as (34c)–(34e) govern sliding. Seeking limit-values of ϕ and μ satisfying both (34c, 34d, 34e) and (40a)–(40c) one finds
Here c n >0 (see (41a)) and μ>0, conditions that, given c t and c s , determine μ and (the signs of sϕ and cϕ, hence) ϕ uniquely, namely,
Moreover, dv t /dI n =0 and dv s /dI n =0 ((39)), so that, in view of (36a) and (36b)
μ c and ϕ c in (43) satisfy (44), and conversely, if g(μ,ϕ) and h(μ,ϕ) ((32) and (33)) are substituted explicitly in (36a) and (36b), then, in view of (39) and (44), m ns −μm ss sϕ−μm ts cϕ=0 and m nt −μm tt cϕ−μm ts sϕ=0, equations having (μ c ,ϕ c ) as a unique solution. μ c is interpreted as the minimal coefficient of friction for which sticking remains once it has occurred. (In ‘balanced collision’ \(m_{nt} = m_{ns} = 0 \mathop{\Rightarrow} \limits_{(41)}c_{t} = c_{s} = 0\mathop{ \Rightarrow}\limits_{(43)}\mu_{c} = 0\), as indicated by Battle in [8].) That is, if s(t=t S )=0 and μ>μ c then s(t S <t≤t 2)=0; and, for t S <t≤t 2, (34a)–(34e) can be replaced with





3.3 Sliding renewal
If μ<μ c , and s(t=t S )=0 before I n2 is reached, sliding is resumed; however, I n2, I t2 and I s2 cannot be obtained by the integration of (34a)–(34e), which become singular (\(s(t= t_{S}) = 0 \Rightarrow h(\mu,\bar{\phi} ) = 0\)). One way to navigate the solution through this singularity (see [9]) for t>t S is to let ϕ switch values from \(\phi= \bar{\phi}\) to \(\phi=\hat{\phi}\), the only solution of h(μ,ϕ)=0 satisfying \(\mathrm {d}s/\mathrm {d}I_{n} = g(\mu,\hat{\phi} ) > 0\) (see Appendix B). If, in addition, dϕ/dI n =0 is imposed, then ϕ remains constant \(( = \hat{\phi} )\), \(\mathrm {d}s/\mathrm {d}I_{n} = \mathit{const} = g(\mu,\hat{\phi} ) > 0\) (see (34a) and (34b)), and, for t S <t≤t 2 (34a)–(34e) can be replaced with





In conclusion, solutions to the 3D collision problem can be obtained by the integration of (34a)–(34e). If s(t=t S )=0, then (34a)–(34e) are replaced by either (45a)–(45e) or (46a)–(46e), according to weather μ>μ c (sticking) or μ<μ c (sliding renewal).
It may occur that \(\mu= \mu_{s}\hat{ =} m_{ns}/m_{ts}\); then initially h(μ,0)=m ns −μm ts =0. In that event ϕ≡0, and the hodograph remains on the v t axis unless sticking occurs with μ s <μ c ; then sliding is renewed in the \(\hat{\phi}\) direction. If μ s >μ c , sticking prevails.
Next, the assumption that I n2 is known is abandoned in favor of collision hypotheses which govern the integration limits. Accordingly, Newton’s [13], Poisson’s [14] and Stronge’s [11] collision hypotheses will be introduced, along with the following assumption, namely, that the collision time comprises a compression phase, starting at t 1 and terminating at t C , the instant of maximum compression, when the normal relative velocity vanishes, i.e.,
and a restitution phase, starting at t C and terminating at t 2, when R(t 2)=0 (see (5)).
4 Newton’s, Poisson’s and Stronge’s hypotheses
4.1 Newton’s hypothesis
In accordance with Newton’s hypothesis, the coefficient of restitution is defined
Here, the integration proceeds until v n =v n2.
4.2 Poisson’s hypothesis
Let I nC and I nR be parts of I n2 associated with the compression and with the restitution phases, respectively; then (see (10a))
According to Poisson’s hypothesis, the coefficient of restitution is defined
so that, in light of (49) and (50)
Here I nC is recorded for which v n vanishes. I n2 is then evaluated with (51), and the integration proceeds until I n =I n2.
4.3 Stronge’s hypothesis
Let ΔE nC (<0) and ΔE nR (>0) be parts of the ‘normal’ energy loss ΔE n2 (see (35b)) associated with the compression and the restitution phases, respectively; then
According to Stronge’s hypothesis, the coefficient of restitution is defined
so that, in light of (52) and (53)
Here ΔE nC is recorded for which v n vanishes (see (35b)). ΔE n2 is then evaluated with (54), and the integration proceeds until ΔE n =ΔE n2.
The steps underlying the solution by integration can be summarized as follows:
-
1.
Find n, t and s satisfying relations (7b)–(7d), and identify V n , V t and V s ((12a)–(12d)), the members of M ((9)) and \(\mathfrak{M}\) ((18)), c n , c t and c s (41a)–(41c), and μ c , ϕ c ((43)); and \(\hat{\phi}\) satisfying \(h(\mu,\hat{\phi} ) = 0\) with \(g(\mu,\hat{\phi} ) > 0\).
-
2.
Introduce λ, a parameter, and integrate both sides of the expressions
$$ [\mathrm{Eqs}.(34i)](1 - |\lambda|) +[\mathrm{Eqs}.(45i)]\lambda(\lambda- 1)/2 +[\mathrm{Eqs}.(46i)]\lambda(\lambda+ 1)/2$$(55)with i playing the roles of a, b, c, d and e, one at a time, and with λ(0)=0, ϕ(0)=0, s(0)=v t1, v n (0)=v n1, I t (0)=0 and I s (0)=0 as initial conditions, switching, if s<ε s , from the initial sliding (λ=0) to sticking (μ>μ c ,λ=−1) or to sliding renewal (μ<μ c ,λ=1). It can be shown that, if ε s is sufficiently small, it has no effect on the integration results.
-
3.
Identify v n2, I n2 or ΔE n2, and stop the integration according to the chosen collision hypothesis; find I n2, I t2 and I s2 and then Δu 1,…,Δu p with (12a).
-
4.
Evaluate the mechanical energy loss with both (23) (two versions) and (35a). Identical results validate of the entire procedure.
These steps need modifications, discussed in Appendix C, when used to solve the 2D problem. With these modifications, all the results reported in Table 3 of [3] for the planar version of the two-sled problem are reproduced with a three-digit precision.
5 The two-sled example ([30], p. 9)
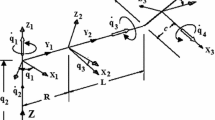
Figure 2 shows two identical sleds A and B comprising rods of length 2l and mass m, supported by massless knife-edges with steering angles γ and δ, touching planes \(\bar{A}\) and \(\bar{B}\) fixed in N at points A s and B s , a distance k from their mass centers A ∗ and B ∗; and supported by two back sliders moving in \(\bar{A}\) and \(\bar{B}\), respectively. \(\bar{A}\) and \(\bar{B}\) are rotated with respect to one another about their intersection line L forming an angle θ<π/2 with \(\bar{\mathbf{a}}_{1}\), a unit vector fixed in \(\bar{A}\), such that lines a and b lying in \(\bar{A}\) and \(\bar{B}\) normal to L form an angle η<π/2; and \(\bar{\mathbf{b}}_{1}|_{\eta=0} = \bar{\mathbf{a}}_{1}\). Let u 1,…,u 6 be generalized speeds, and let the velocities of A ∗ and B ∗, and the angular velocities of A and B in N, expressed as
be subject to the constraints \(\mathbf {v}^{A_{s}} \cdot \mathbf{a}'_{2} = 0\) and \(\mathbf {v}^{B_{s}} \cdot \mathbf {b}'_{2} = 0\) imposed by the knife-edges. Here a i , b i , \(\mathbf {a}'_{i}\) and \(\mathbf {b}'_{i}\) (i=1,2,3) are sets of three dextral, mutually perpendicular unit vectors fixed in A and B, with a 3 and \(\mathbf {a}'_{3}\), and b 3 and \(\mathbf {b}'_{3}\) normal to \(\bar{A}\) and \(\bar{B}\), respectively, as shown in Fig. 2. The indicated constraint equations, when written explicitly and solved for u 2 and u 5, read
where t(.)=tan(.), and lead, with u 1, u 3, u 4, and u 6 regarded as independent generalized speeds, to the following equations, governing motions of A and B:

where s(.)=sin(.) and c(.)=cos(.). Defining generalized coordinates q 1,…,q 6 as \(q_{1}\hat{ =} \mathbf {p}^{A*} \cdot \mathbf {a}_{1}\), \(q_{2}\hat{ =} \mathbf {p}^{A*} \cdot \mathbf {a}_{2}\), \(\dot{q}_{3}\hat{ =} u_{3}\) and \(q_{4}\hat{ =} \mathbf {p}^{B*} \cdot \mathbf {b}_{1}\), \(q_{5}\hat{ =} \mathbf {p}^{B*} \cdot \mathbf {b}_{2}\), \(\dot{q}_{6}\hat{ =} u_{6}\), one can replace the constraint equations with

non-integrable differential equations, which make the system non-holonomic. Next, suppose that at time t 1 the endpoint B c of B collides with point A c of A located a distance p from A ∗; and that it is required to evaluate the associated changes in the generalized speeds and in the system kinetic energy. To this end, the velocities of A c and B c are expressed as
and the relative velocity \(\mathbf {v}^{R} = \mathbf {v}^{B_{c}} - \mathbf {v}^{A_{c}}\) of the colliding points is written, with z 1=(k−p)u 3−tγu 1, z 2=(l−k)u 6+tδu 4, z 3=cη+c 2 θ(1−cη), z 4=cη+s 2 θ(1−cη), z 5=sθcθ(1−cη), z 6=z 5 sq 6+z 3 cq 6, z 7=z 5 cq 6−z 3 sq 6, z 8=z 5 cq 6+z 4 sq 6, and z 9=z 5 sq 6−z 4 cq 6, as

With n, t and s identified as n=a 2, t=cφ a 1+sφ a 3 and s=−sφ a 1+cφ a 3, φ can be found that satisfies v R⋅t=v t1>0 and v R⋅s=v s1=0, enabling the evaluation of V n , V t and V s ((12a)–(12d)) and of the members of \(\mathfrak{M}\) ((15)). With m=3 kg, l=1, k=0.75, p=−0.5m, γ=δ=0.2, θ=π/3, η=2π/9 rad, q 3(t 1)=π/4, and q 6(t 1)=7π/4 rad one can show, by substitutions, that φ=3.81, m nn =0.225, m tt =0.236, m ss =0.270, m nt =−0.109, m ts =−0.116, m ns =−0.126 ((18)), c n =42.6, c t =37.3, c s =35.8 ((41a)–(41c)), μ c =1.21, ϕ c =3.76 ((43)) and \(\hat{\phi} = 3.91\) (Sect. 3.3). For u 1(t 1)=u 4(t 1)=1 m/sec, u 3(t 1)=u 6(t 1)=0.1 rad/sec (v n1=−0.9,v t1=1.06,v s1=0m/sec), one obtains, integrating (34a)–(34e), (45a)–(45e) and (46a)–(46e) with ε s =0.1÷0.01, results recorded in Table 1 and Fig. 3 for μ=0.6, 1.1, 1.6 and e=0.8, where ‘○’, ‘+’ and ‘□’ designate collision termination points according Newton’s, Poisson’s and Stronge’s hypotheses, respectively. One can thus follow the hodographs as μ increases. For \(\mu< \mu_{s}\hat{ =} m_{ns}/m_{ts} = 1.086\) (e.g., μ=0.6) there is sliding, with a local maximum approaching the origin. If μ=μ s ⇒h=0 (see end of Sect. 3.3) then ϕ≡0 throughout sliding ((34a)). The sliding part runs along the v t axis, and is followed by a sliding renewal part. The latter becomes ‘shorter’ as μ increases toward μ c , vanishing for μ=μ c . For μ>μ c sliding is followed by sticking for all collision hypotheses; then the three hodograph end-points overlap at the origin. The similarity between the hodographs for the sliding and the sliding renewal cases corroborates the ‘switch’ between \(\bar{\phi}\) and \(\hat{\phi}\) when sliding renewal occurs (Appendix B). Regarding energy gains associated with Newton’s hypothesis, it turns out to be significantly larger than that recorded for 2D systems, e.g. in [17] and [28].

A two-sled collision

v s vs. v t (hodograph) and v n and s vs. I n for μ=0.6, 1.1, 1.6, yielding sliding, sliding renewal (\(\bar{\phi} = 0.432\)) and sticking (\(\bar{\phi} = 0.598\)), respectively
It may occur that the number of collisions become large, as when numerous particles or bodies collide with one another. In that case the use of elaborate numerical integrators to solve (55) can produce prohibitively long simulations, unless exact integrals exist, e.g., when μ=0 ([5] and [6]) or when m nt =m ns =m ts =0. This state of affairs can be alleviated with recursive summation-based solutions, which, taking advantage of the limited integration range of (55), provide a reasonable compromise between accuracy and speed. Such a solution is discussed next.
6 Solution by recursive summation
6.1 Recursive summation
Referring to Euler’s explicit, first order accurate method, described, e.g., in [31], Para. 3, Sect. 9, let I n (1)=0, I n (i)=(i−1)/k, \(D(i)\hat{ =} I_{n}(i) - I_{n}(i - 1)(i =2,3,\ldots)\), where k, an integer, is a refinement factor, and replace (55) with



where λ=0, ϕ(1)=0, s(1)=v t1, v n (1)=v n1, I t (1)=I s (1)=ΔE(1)=ΔE n (1)=0, and f(1)=m nn −μm nt , g(1)=m nt −μm tt , h(1)=m ns −μm ts . Now, by [31] Euler’s method is stable if each of the eigenvectors λ j (j=1,…,5) of the coefficient matrix of the linearized right-hand-sides of (34a)–(34e) about a point ϕ 0, s 0, v n0, I t0 and I s0 ‘close’ to the integration range satisfies the inequalities |1−λ j D|≤1, D=D(i)/k being the summation step. There are two nonzero eigenvector associated with (34a)–(34e), namely \(\lambda_{1,2} = 1/s_{0}(h'_{0} \pm\sqrt{h_{0}^{\prime 2} - 4h_{0}g'_{0}} )\), \(h'_{0}\hat{ =} dh/d\phi|_{\phi= \phi_{0}}\), \(g'_{0}\hat{ =}dg/d\phi|_{\phi= \phi_{0}}\), drifting apart as s 0→0, thus leading to a stiffer system. At the limit s 0=0, hence (Sect. 3.2) \(h_{0} = h(\bar{\phi} ) = 0\) \((\phi_{0} = \bar{\phi})\). Only one nonzero, infinitely large eigenvector remains, which decrees \(0 <h'_{0}/s_{0}D < 1\), and, with a finite summation step, leads to instability accompanied by relatively poor results. One obtains for D(i)=1, k=1 (i.e., 5-8 summation steps) a ∼96% agreement with the results of Sect. 5 for μ=0.6, and (only) ∼70% agreement for μ=1.1,1.6, where s 0=0 (sticking) is reached. Increasing k to 5, one has ∼98% and ∼90% agreement, respectively. Further investigation of this procedure is left for future work.
6.2 Partial integration/recursive summation (i/rs)
Equations (45a)–(45e) and (46a)–(46e) can be integrated analytically. Thus, a one-step evaluation can replace integration or recursive summation for the sticking or the sliding renewal parts of the collision, saving computation time. To show this, suppose again that the normal impulse I n2 is known. If, in the i/rs process, I n2 is reached with s>0, then sliding prevails. If, however, s vanishes before I n2 is reached, then the associated values of v n , I n , I t and I s , denoted v nS , I nS , I tS and I sS , obtained with (34a)–(34e) or (56a)–(56l) (for λ=0) are recorded, and used to identify v n2, I n2, I t2, I s2 and ΔE n2, as follows. If μ>μ c , then sticking prevails, and I n2, I t2 and I s2 can be obtained by the analytic integration of (45a)–(45e) from t S to t C and from t C to t 2 if t C >t S (sticking in compression), yielding






where (47) was used; or from t S to t 2 if t C <t S (sticking in restitution), yielding



relations valid also for sticking in compression. If, on the other hand, μ<μ c , then sliding renewal prevails, and I n2, I t2 and I s2 can be obtained by the analytic integration of (46a)–(46e) from t S to t C and from t C to t 2 if t C >t S (sliding renewal in compression), yielding










where (47) was used with \(\hat{f}\mathop{\hat{ =}}\limits_{(31)}f(\mu,\hat{\phi} )\) and \(\hat{g}\mathop{\hat{=}}\limits_{(32)}g(\mu,\hat{\phi} )\); or from t S to t 2 if t C <t S (sliding renewal in restitution), yielding





relations valid also for sliding renewal in compression.
The use of (57a)–(57f) and (60a)–(60e) can limit the integration or the recursive summation to the sliding part of the collision with the aid of the following collision hypothesis-dependent procedures, all starting with the evaluation of s, v n , I n , I t and I s by i/rs.
6.3 Collision hypotheses
6.3.1 Newton’s hypothesis
If, during i/rs, v n2 is reached with s(v n2)>0, then I n2=I n (v n =v n2), I t2=I t (v n =v n2) and I s2=I s (v n =v n2) are identified. If s(v n <v n2)=0, then v nS , I nS , I tS and I sS are recorded, and used to evaluated I n2, I t2 and I s2 either with (58a)–(58c) or with (60a)–(60c), depending on whether μ>μ c (sticking) or μ<μ c (sliding renewal), respectively.
6.3.2 Poisson’s hypothesis
If, during i/rs, v n =0 occurs before s vanishes (t C <t S ), then I nC is recorded, and I n2 calculated ((51)). The i/rs proceeds until s=0 or I n =I n2. If I n =I n2 occurs first, then sliding prevails, and I n2, I t2=I t (I n =I n2) and I s2=I s (I n =I n2) are identified during the i/rs. If s=0 occurs first, then v nS , I nS , I tS and I sS are recorded. If μ>μ c , then sticking prevails in restitution, and v n2, and then I t2 and I s2 are evaluated with (58a), and then (58b) and (58c), respectively. If μ<μ c , then sliding renewal prevails in restitution, and v n2, and then I t2 and I s2 are evaluated with (60a), and then (60b) and (60c), respectively. Next, if s=0 occurs before v n =0(t C >t S ), then v nS , I nS , I tS and I sS are recorded. If μ>μ c , then sticking prevails in compression. I nC and I n2 are obtained form (57a) and (51); and v n2, and then I t2 and I s2 are evaluated with (58a), and then (58b) and (58c), respectively. Finally, if μ<μ c , then sliding renewal prevails in compression. I nC and I n2 are obtained form (59a) and (51); and v n2, and then I t2 and I s2 are evaluated with (60a), and then (60b) and (60c), respectively.
6.3.3 Stronge’s hypothesis
Here ΔE n is obtained by i/rs (see (35b)/(56l)) as well. If v n =0 occurs before s vanishes (t C <t S ,I nC <I nS ), then ΔE nC is recorded, and ΔE n2 is evaluated ((54)). The i/rs proceeds until s=0 or ΔE n2 is reached. If ΔE n2 is reached first, then sliding prevails, and I n2=I n (ΔE n =ΔE n2), I t2=I t (ΔE n =ΔE n2) and I s2=I s (ΔE n =ΔE n2) are identified during the i/rs. If s=0 occurs first, then v nS , I nS , I tS , I sS and ΔE nS are recorded. Now, if μ>μ c , then sticking prevails in restitution, and one can write \(\Delta E_{n2} - \Delta E_{nS}\mathop{ =}\limits_{(35\mathrm{b})}\int_{ I_{nS}}^{ I_{n2}}v_{n}\,\mathrm{d}I_{n} \mathop{ =}\limits_{(45\mathrm{c)}}c_{n}\int_{v_{nS}}^{v_{n2}}v_{n}\,\mathrm{d}v_{n} = c_{n}(v_{n2}^{2} -v_{nS}^{2})/2\), which yields
in accordance with (54). The positive root was chosen to ensure v n2>0 and ∂v n2/∂e>0; and I n2, I t2 and I s2 are evaluated with (58a)–(58c). If μ<μ c , then sliding renewal prevails in restitution, v n2 is evaluated by (61) with \(1/\hat{f}\) replacing c n (\(\mathrm{d}v_{n}/\mathrm{d}I_{n}\mathop{ =}\limits_{(46\mathrm{c})}\hat{f}[\hat{ =} f(\mu,\hat{\phi} )]\) replaces \(\mathrm{d}v_{n}/\mathrm{d}I_{n}\mathop{ =}\limits_{(45\mathrm{c})}1/c_{n}\)); and I n2, I t2 and I s2 are evaluated with (60a)–(60c). Next, if s=0 occurs while v n <0 (t C >t S ,I nC >I nS ), then v nS , I nS , I tS , I sS and ΔE nS are recorded. If μ>μ c , then sticking prevails in compression, and \(\Delta E_{nC} - \Delta E_{nS}\mathop{ =} \limits_{(35\mathrm{b})}\int_{I_{nS}}^{ I_{nC}} v_{n}\,\mathrm{d}I_{n} \mathop{ =}\limits_{(45\mathrm{c})} c_{n}\int_{v_{nS}}^{v_{nC}}v_{n}\,\mathrm{d}v_{n} \mathop{ =} \limits_{(47)} -c_{n}v_{nS}^{2}/2\), or
One can then obtain v n2 by substitution form (62) in (61), and then evaluate I n2, I t2 and I s2 with (58a)–(58c). Finally, if μ<μ c , then sliding renewal prevails in compression. ΔE nC is identified with the aid of (62) with \(1/\hat{f}\) replacing c n . Then (61) is used to evaluate v n2 (again with \(1/\hat{f}\) replacing c n ), which is then used to uncover I n2, I t2 and I s2 with (60a)–(60c).
For the last two cases of Table 1 one obtains, integrating (34a)–(34e) in conjunction with (58a)–(58c), (60a)–(60c), (61) and (62),


the exact results (within four digits) obtained by the integration of (55).
7 Conclusions
Three sets of five differential equations governing 3D one-point collision with friction problems associated with simple, non-holonomic systems were discussed, and shown to possess unique solutions. Ways to speed up the integration were presented, whereby the integration of equations governing the sliding part of the collision was replaced with recursive summation, and the integration of equations governing the sticking and sliding renewal parts were replaced with a one-step evaluation of the impulse components. It was also demonstrated that Newton’s hypothesis can lead to energy discrepancy significantly exceeding the values recorded to-date for planar systems. Finally, it is noted that there is no clear cut proof that Poisson’s hypothesis always lead to energy-consistent solutions in 3D systems, leaving Stronge’s hypothesis the most suitable for the type of solution under consideration.
References
Chatterjee, A., Ruina, A.: A new algebraic rigid-body collision law based on impulse space consideration. J. Appl. Mech. 65, 939–951 (1998)
Najafabadi, S.A.M., Kovecses, J., Angeles, J.: A comparative study of approaches to dynamics modeling of contact transitions in multibody systems. In: Proceedings of IDETC/CIE 2005 Conferences, DET2005-85418, Long Beach, CA, 24–28 Sep. 2005
Djerassi, S.: Stronge’s hypothesis-based solution to the collision-with-friction problem. Multibody Syst. Dyn. 24, 493–515 (2010). doi:10.1007/s11044-010-9200-4
Keller, J.B.: Impact with friction. J. Appl. Mech. 53, 1–4 (1986)
Whittaker, E.T.: A Treatise on the Analytical Dynamics of Particles & Rigid Bodies. Cambridge University Press, Cambridge (1904) (reprint 1993)
Wang, D., Conti, C., Beale, D.: Interference impact of multibody systems. J. Mech. Des. 121, 128–135 (1999)
Smith, C.E.: Predicting rebounds using rigid-body dynamics. J. Appl. Mech. 58, 754–758 (1991)
Batlle, A.J.: Rough balanced collision. J. Appl. Mech. 63, 168–172 (1996)
Bhatt, V., Koechling, J.: Three-dimensional frictional rigid-body impact. J. Appl. Mech. 62, 893–898 (1995)
Battle, J.A.: The sliding velocities flow of rough collisions in multibody systems. J. Appl. Mech. 63, 804–809 (1996)
Stronge, W.J.: Impact Mechanics. Cambridge University Press, Cambridge (2000)
Zhen, Z., Liu, C.: The Analysis and Simulation for three-dimensional impact with friction. Multibody Syst. Dyn. 18, 511–530 (2007)
Newton, I.: Philosophias Naturalis Principia Mathematica. R. Soc. Press, London (1686)
Poisson, S.D.: Mechanics. Longmans, London (1817)
Boulanger, G.: Note sur le choc avec frottement des corps non parfaitment elastique. Rev. Sci. 77, 325–327 (1939)
Najafabadi, S.A.M., Kovecses, J., Angeles, J.: Generalization of the energetic coefficient of restitution for contacts in multibody systems. J. Comput. Nonlinear Dyn. 3, 041008 (2008)
Kane, T.R., Levinson, D.A.: Dynamics: Theory and Application. McGraw Hill, New York (1985)
Rubin, M.B.: Physical restrictions on the impulse acting during three-dimensional impact of two ‘rigid’ bodies. J. Appl. Mech. 65, 464–469 (1998)
Ivanov, A.P.: Energetics of a collision with friction. J. Appl. Math. Mech. 56(4), 527–534 (1992)
Brach, R.M.: Rigid body collisions. J. Appl. Mech. 56, 133–138 (1989)
Routh, E.J.: Dynamics of a System of Rigid Bodies. Elementary Part, 7th edn. Dover, New York (1905)
Hurmuzlu, Y.: An energy-based coefficient of restitution for planar impacts of slender bars with massive external surface. J. Appl. Mech. 65, 952–962 (1998)
Marghitu, D.B., Hurmuzlu, Y.: Three-dimensional rigid-body collisions with multiple contact points. J. Appl. Mech. 62, 725–732 (1995)
Smith, C.E., Liu, P.-P.: Coefficient of restitution. J. Appl. Mech. 59, 963–969 (1992)
Stoianovici, D., Hurmuzlu, Y.: A critical study of the applicability of rigid-body collision theory. J. Appl. Mech. 63, 307–316 (1996)
Flores, P., Ambrosio, J., Claro, J.P.C., Lankaraki, H.M.: Translational joints with clearance in rigid multibody systems. J. Comput. Nonlinear Dyn. 3, 011007 (2008)
Erickson, D., Weber, M., Sharf, I.: Contact stiffness and damping estimation for robotic systems. Int. J. Robot. Res. 22(1), 41–57 (2003)
Djerassi, S.: Collision with friction; part A: Newton’s hypothesis. Multibody Syst. Dyn. 21, 37–54 (2009). doi:10.1007/s11044-008-9126-2
Boyce, E.W., DiPrima, C.R.: Elementary Differential Equations, 3rd edn. Wiley, New York (1977)
Neimark, J.I., Faev, N.A.: Dynamics of Nonholonomic Systems. American Math Society, Providence (1972)
Ferziger, T.H.: Numerical Methods for Engineering Application. Wiley, New York (1981)
Strang, G.: Linear Algebra and Its Application. Academic Press, New York (1980)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
The kinetic energy of a system S of ν particles described in Sect. 2 is given by \(E = 1/2\sum_{i = 1}^{\nu} m_{i}(\mathbf {v}^{P_{i}} )^{2}\), a positive quantity which can be cast into the form
where \(m_{rs}\hat{ =} - \sum_{i = 1}^{\nu} m_{i} \mathbf {v}_{r}^{P_{i}} \cdot \mathbf {v}_{s}^{P_{i}}\), if \(\mathbf {v}_{t}^{P_{i}} = 0\), i=1,…,ν (see (2)), rendering the mass matrix −M symmetric and positive definite. Now, the coefficient matrix \(\mathfrak{M}\) of (23)–(25) is also positive definite. To show this, note that \(\mathfrak{M}\) can be written
where V is 3×p matrix appearing in (14). Because −M hence −M −1 are positive definite matrices, one can write ([32], p. 109)
Thus,
and, since det(BB T)=detBdetB T=(detB)2>0, then \(\det\mathfrak{M}= \det(\mathbf {B}\mathbf {B}^{T}) > 0\), where
By the same token, the removal of the first, second or third row of V reduces V(−M −1)V T to 2×2 diagonal submatrices of \(\mathfrak{M}\), obtained by the removal of the first, second or third row-and-column of \(\mathfrak{M}\), respectively. As with the 3×3 case, these submatrices have positive determinants, namely
The removal of any two of the rows of V reduces V(−M −1)V T to one of the diagonal elements of \(\mathfrak{M}\), positive numbers defined in the first, third and last of (15). Thus, the principal submatrices of \(\mathfrak{M}\) are all positive, hence \(\mathfrak{M}\) is positive definite ([32], p. 250).
Appendix B
If g(μ,ϕ)=0 and h(μ,ϕ)=0 (see (44)), then also μg(μ,ϕ)=0 and μh(μ,ϕ)=0; and these equations become, if the substitutions u=μcϕ and v=μsϕ are used,
even and odd functions, respectively of v,m ns and m ts (μg(v,m ns ,m ts )=μg(−v,−m ns ,−m ts )=0 and μh(v,m ns ,m ts )=−μh(−v,−m ns ,−m ts )=0). The coordinate transformation |u′v′|=|uv|T, where the columns of T are the eigenvectors of the coefficient matrix g=|m tt m ts ; m ts m ss |, brings (69) into the form λ 1 u′2+λ 2 v′2+( )u′+( )v′=0, where λ 1 and λ 2 are the eigenvalues of g ([32], p. 255) given by
Here λ 1>0 and λ 2>0 (the expression under the root is always positive and smaller than m tt +m ss ), therefore (69) represents an ellipse passing through the origin, as illustrated in Fig. 4 for the example of Sect. 5. Similarly for (70), the eigenvalues of the coefficient matrix h=|m ts −(m tt −m ss )/2; −(m tt −m ss )/2−m ts | are
and, since λ 1>0 and λ 2=−λ 1, (70) represents a hyperbola with orthogonal asymptotes parallel to the lines u′=±v′. Its branches are called ‘remote’ and ‘near’, the latter passing through the origin (Fig. 4). The normalized (unit) eigenvectors of g and h are Sines and Cosines of ϕ e and ϕ h , uniquely determined angles describing the orientation of the major axes of the ellipse and the hyperbola with respect to the u−v axes. ϕ e and ϕ h satisfy the relations
so that the angle between the major axes of the ellipse and the hyperbola is π/4 (see Fig 4). Moreover, the ellipse and the hyperbola intersect at the origin u=v(=μ)=0, where they are perpendicular, i.e.,
and at point (μ c ,ϕ c ) described by (43) as a unique solution of (44) (or (69) and (70)), hence lie on the near branch of the hyperbola (so that the remote branch does not intersect the ellipse). Note that point (0,0) is not a solution of (44), for g(0,0)=m nt ≠h(0,0)=m ns (see (32) and (33)). Now g(μ,ϕ) can be written
The expression multiplying μ comprises a negative number (Appendix A, (68)). Consequently, if l is a line passing through the origin and point (μ e ,ϕ e ) on the ellipse (g(μ e ,ϕ e )=0), then the (cylindrical) coordinates μ and ϕ e of points of l satisfy either g(μ,ϕ e )>0 or g(μ,ϕ e )<0, depending on whether the indicated point is inside (μ<μ e ) or outside (μ>μ e ) the ellipse. If a circle of radius μ is drawn with its center at the origin, then the orientation angles of lines passing through the origin and each of the intersection points of the circle with the hyperbola (two or four), are solutions of h(μ,ϕ)=0. If outside the ellipse, these points satisfy g(μ,ϕ)<0 (e.g., Points A and B in Fig. 4). However, if μ<μ c , then one, and only one of these points, namely \((\mu,\hat{\phi} )\), lies within the ellipse (e.g., Points C in Fig. 4); and, because \(g(\mu,\hat{\phi} ) > 0\), it accommodates sliding renewal in direction \(\hat{\phi}\) (Sect. 3.3). Points B accommodate angle \(\bar{\phi}\) (Sect. 3.2) and Point D accommodates μ c and ϕ c ((43)).

The ellipse and the hyperbola for the example of Sect. 5, with circular segments designating μ=0.6, 1.1, 1.6 and μ c =1.21
Appendix C
In 2D systems
-
1.
m ns =m ts =m ss =0, hence c n =c t =c s =0 (see (41a)–(41c)); and μ c and ϕ c (43) become undefined. With ϕ≡0 and dϕ/dI n =0 (34a)–(34e) remain intact.
-
2.
Equations (25)–(27) reduce to dv n =Δ/m tt dI n , dI t =−m nt /Δ, dI s =0 where \(\Delta\hat{ =} m_{nn}m_{tt} -m_{nt}^{2}\), hence (45a)–(45e) become dϕ/dI n =0, ds/dI n =0, dv n /dI n =Δ/m tt , dI t /dI n =−m nt /m tt , dI s /dI n =0.
-
3.
The solution of h(μ,ϕ)=0, g(μ,ϕ)>0 is \(\hat{\phi} =\pi\), leaving (46a)–(46e) intact.
The procedure of Sect. 4 can be applied to 2D systems if modified accordingly.
Rights and permissions
About this article
Cite this article
Djerassi, S. Three-dimensional, one-point collision with friction. Multibody Syst Dyn 27, 173–195 (2012). https://doi.org/10.1007/s11044-011-9287-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-011-9287-2