
Abstract
This paper tries to find the reasons of differences between results from semiactive suspension simulations and from real measurements. Simulations of semiactive algorithms which have already been published in many scientific papers have showned a great potential for improvement of the suspension quality. However, experiments with suspension controlled by semiactive algorithms which are supposed to improve grip did not bring any benefits. The reason of algorithm failure seems to be the response time of the damper used in the suspension. This paper compares the quality of suspension using three different semiactive algorithms (Skyhook, Groundhook, modified Groundhook) and passive settings for different damping levels. All the simulations were conducted for three different response times of MR damper: 1.5, 8 and 20 ms. Response time 20 ms is usual for commercial MR dampers control. Response time 8 ms corresponds to commercial MR dampers which are controlled by the newly developed PWM controller. Response time 1.5 ms corresponds to the fastest available MR devices. Simulations show a significant influence of the MR damper response time on the suspension quality if semiactive algorithms are used. The simulations are confirmed by measurements on a quarter car suspension controlled by modified Groundhook algorithm using MR damper with response time 8 and 20 ms.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The aim of the car suspension is minimization of sprung mass vibrations (comfort function) and ensuring as stable grip as possible (safety function). Recently, only passive systems (which work just with static force-velocity damping characteristics) have been used in most of the cases. Better suspension quality can be achieved when a fast semi-active suspension system is used. In this case, the damping force does not correspond to any static F-v characteristics, but the force is set to a desired value according to the input control variables (sprung mass acceleration, unsprung mass acceleration). Many semiactive control algorithms have been designed in theory. These algorithms can generally be divided into two groups. The first group consists of algorithms improving ride comfort. This group includes the Skyhook algorithm which was originally designed by Karnopp [5] and further optimized by Ahmadian [1]. This algorithm was also simulated by Nguyen [10] with ER damper. The second group consists of algorithms improving wheel grip. The most famous algorithm belonging to this group—Groundhook was described by Valášek [15] and simulated in paper [14]. Yao [19], Koo [7] and Kim [6] compared suspension quality with MR dampers using semiactive algorithms and showed their considerable potential. The best results from the point of view of comfort are achieved with semiactive suspension controlled by Continuous Skyhook control. On the other hand, Groundhook algorithm simulations show great potential for improving grip. The efficiency of Groundhook algorithm was experimentally tested on a system with \(2^\circ \) of freedom (DOF) in laboratory conditions by the team of Ahmadian [1]. Sweep was used as an input signal and, and the criterion for quality evaluation was the amplitude-frequency characteristics which, however, does not reflect grip but compares amplitude of output vibrations to amplitude of input vibrations in dependence on frequency. Simulations of semiactive algorithms on virtual rear motorbike suspension model, conducted by team of Pussot-Vassal [11], confirm results from research of Ahmadian. Authors of paper [16] designed a modification of Skyhook algorithm, which implemented asymmetric control of symetric MR damper. Simulations on quarter car suspension model showed improvement in comparison to Skyhook. Authors, however, ignored response time of the MR damper (time needed for reaching 63 % of final steady-state value after a step of the control signal). The models of MR damper which do not take into account the response time of the MR damper are often used for simulations of semiactive suspension with MR damper ([2, 12, 17]). But neglecting of MR damper time response can reduce the suspension quality especially in case of fast control loop. The influence of MR damper response time on suspension quality of system with 1 DOF was investigated by the team [3]. Although authors used simplified MR damper model, simulations showed sesitivity of Rakheja-Sankar semiactive algorithm efficiency on response time of damper.
Response time of MR devices was examined by a number of scientific teams. Maas [9] designed a MR clutch with very fast response time. The response time (dependent on ferrite particles to oil ratio in the MR fluid) was measured in the range of 0.76–1.26 ms. Goncalves [4] measured response time of the MR fluid itself. Again, the response time was dependent on ferrite particles to oil ratio and was in the range of 0.45–0.6 ms. Although authors Koo [8] and Yang [18] measured response times of usual MR dampers in the range of tens of milliseconds, response time shorter than 1.5 ms can be expected from MR damper, if designing methods from fast MR clutch construction are used.
2 Methods
The aim of this work was to determine the influence of MR damper response time on efficiency of semiactive car suspension with MR damper by the means of simulations of quarter car suspension model with MR damper. The simulations were completed on three different semiactive algorithms—Skyhook, Groundhook and modified Groundhook. Modal parameters of the car suspension were tuned to similar characteristics as the rear suspension of Škoda Fabia car described in [13]. This virtual model was validated by measurements on Pioneer experimental trolley (with same modal parameters like the model) which was riding on Dynotec road simulator with a bump.
2.1 Virtual model
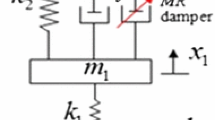
Virtual model according to Fig. 1 was designed in Matlab.

Model of quarter suspension with MR damper
Meanings of particular variables together with parameter values used for the simulation are given in Table 1.
This iterative model is based on Newton’s laws of motion:
\(F_{k1} = k_1(y_1-y_0)\) is the force of the main spring, \(F_{k2} = k_2(y_2-y_1)\) is the force of the tire spring, \(F_{g1} = m_1 \cdot g \) and \(F_{g2} = m_2 \cdot g \) are gravitation forces of sprung respectively unsprung mass, \(F_{b_1} = b_1(\dot{y}_1-\dot{y}_0)\) is the damping force of the tire. Force of the MR damper \(F_{b2}\) is in each step taken from the non-linear F-v dependency (Fig. 2) with the input parameter relative velocity \(\dot{y}_2-\dot{y}_1\). For simplification we further denote \(\dot{y}\) as \(v\) and \(\ddot{y}\) as \(a\).

F-v dependency of the MR damper
The damper is modeled as non-linear with implemented response time. Dynamic behaviour is approximated as first order dynamic system. The response time for such systems is the time needed for reaching 63.2 % of the final, steady state value (of the force in case of MR damper), if the input signal (control voltage) is a step (see Fig. 3).

Response time definition
Outputs from model are parameters which determine suspension efficiency from the comfort and grip point of view.
2.2 Suspension quality evaluation
One of the main functions of suspension is to ensure as high comfort as possible. That means minimization of vibrations, which are transferred from road to the sprung mass. Relevant variable which describes the quantity of vibrations is AC RMS acceleration value in vertical axis:
If the measurement is discrete, the level of comfort can be expressed as standard deviation of sprung mass acceleration:
The ride safety is determined by the wheel force on the road. If the force significantly alternates in time (the wheel is loosing contact in extreme situations), the ability to transfer brake and side forces is limited. Therefore, for the best grip, the force between wheel and road should be as stable as possible. The suspension quality from the point of view of grip can be expressed as standard deviation of force:
Above mentioned equations, however, describe an overall vibration level, respectively the force variation, but do not reflect the input to the system (road bumps, vehicle speed). For comparison of suspension quality it is necessary to compare standard deviations for the same road profile, same speed and same time period.
2.3 Algorithm principle
The simulated algorithms were chosen from previously published papers. The most famous control algorithm improving comfort Skyhook [1] and most famous algorithm improving grip Groundhook [14], were chosen for analysis. Groundhook algorithm is, however, difficult to implement in real suspension, therefore the third algorithm—Modified Groundhook was designed. This algorithm also improves grip, but the implementation is simpler.
2.3.1 Groundhook
Semiactive suspension controlled by Groundhook algorithm in comparison with passive setting enables achieving better grip of the wheel, while the comfort is decreased. The control rule for this algorithm is based on two input signals: The velocity of unsprung mass to the road surface and relative velocity of sprung and unsprung mass. If the direction of velocity of the unsprung mass to the road is opposite to relative velocity of sprung and unsprung mass (that means if the wheel is rising from the road surface and the damper is compressed, or if the wheel is approaching the surface and the damper is extended), the damper is switched to the state with high damping \(b_{2H}\):
Where \(b_{2H}\) is MR damper damping in activated state and \(b_{2L}\) is damping in non-activated state.
2.3.2 Skyhook
The control rule for this algorithm is based on two input signals: The velocity of sprung mass and relative velocity of sprung and unsprung mass. If the direction of the velocity of the sprung mass is the same as relative velocity of sprung and unsprung mass (that means if the sprung mass is rising and the damper is extended, or if the sprung mass is dropping and the damper is compressed), the damper is switched to the state with high damping \(b_{2H}\):
where \(b_{2H}\) is damping coefficient of the MR damper in activated state and \(b_{2L}\) is damping coefficient in non-activated state.
2.3.3 Modified Groundhook
The principle of this algorithm is derived from unsprung mass acceleration. If the acceleration is of non-zero value, it means that the gravity force and potential force of the spring \(F_{k1}\)(tyre) are no longer in balance. When the unsprung mass acceleration is negative (actual contact force is lower than static), the gravity force is higher than spring \(F_{k1}\) force. On the contrary, when the gravity force is smaller than spring (tyre) force (the contact force is higher than static), unsprung mass acceleration is positive. The damper is controlled in order to bring the unsprung mass acceleration to zero as fast as possible. Equations used in practical application of the algorithm are:
2.4 Experimental trolley
The virtual car suspension model was validated with the help of the Pioneer experimental trolley (Fig. 4)—reduced model of quarter car suspension according to Fig. 1. The wheel of the experimental trolley is riding on the Dynotec road simulator. The road simulator consists of a drum with diameter 0.8 m and electromotor with variable frequency drive which enables to change ride speed (simulations and measurements were conducted with the speed 10 km/h). On the surface of the drum, the bump is mounted. The bump is made of a half pipe with round profile. The height of the bump in its highest point is 21 mm and the length is 55 mm.

Experimental trolley on the road simulator
The road simulator was equipped with a sensor measuring force of the wheel on the road (used for suspension quality evaluation) and with a hall sensor for measuring the speed of the road. On the trolley, there was an unsprung mass acceleration sensor, stroke position sensor (needed for algorithm) and sprung mass acceleration sensor (used for suspension quality evaluation). The positions of sensors are in Figs. 4 and 5.

Experimental trolley on the road simulator
The MR damper, which was used in the experimental trolley, had the piston group from comercially manufactured Delphi MR dampers. MR fluid consisted of 15 % of Fe particles and 85 % of carrier fluid. Approximations of F-v dependencies of MR damper for different static currents are on Fig. 2. The damper was controlled on the basis of measured signals by NI CompactRio real-time computer with current driver of our construction. The driver (connected to the coil of Delphi piston group) enables to switch between standard voltage mode (corresponding response time of MR damper 19–22 ms) and fast PWM mode (response time 8–10 ms).
3 Results

Simulation of skyhook algorithm
3.1 Suspension with MR damper in passive mode
Passive mode (suspension with classical damper) is represented by MR damper powered by constant current. Different setting of damping is accomplished by changing the current. This approach was chosen in order to compare different settings of classical passive suspension to suspension controlled by semiactive algorithms (switching mode). In Figs. 6, 7 and 8, the efficiency of suspension using semiactive algorithms is compared to efficiency of all reasonably possible settings in passive mode. If the damper’s current is gradually increased (increase of damping), the comfort is drops and the the grip is grows untill the current of 1.6 A (e.g. Fig. 6). Further increase of the current is not advantageous, as rise in damping brings drop of both grip and comfort. Also lowering of damping under state corresponding to 0 A would not bring any improvement in grip or comfort.

Simulation of Groundhook algorithm

Simulation of modified Groundhook algorithm
3.2 Skyhook algorithm
Figure 6 shows the effciency of suspension controlled by Skyhook algorithm. The variance of sprung mass acceleration (comfort) is on the y axis and variance of force between tyre and road (safety) is on the x axis. Three variants of suspension controlled by semiactive Skyhook algorithm are compared with passive setting. First variant (response time of MR damper = 20 ms) corresponds to the response time of common MR damper controlled in voltage mode (dash dotted line). Dashed line is for semiactive suspension with MR damper with response time 1.5 ms, which corresponds to the fastest MR devices. The third variant (8 ms) corresponds to the response time of the common MR damper controlled in fast PWM mode. Courses show that the longer is the MR damper response time, the smaller is the best reachable comfort. Application of this algorithm makes sense only when the working point is under the course of passive mode. Semiactive suspension quality is dependent on MR damper response time. The best comfort using Skyhook algorithm was achieved for current 0.5 A in activated state and 0 A in non-activated state.
3.3 Groundhook algorithm
Figure 7 compares the quality of suspension controlled with Groundhook algorithm with three different response times of MR damper (T = 20, 1.5, 8 ms). It is obvious that usage of this algorithm for low currents in activated state is not reasonable, because points for such settings are above the course for passive setting (Fig.7) (comfort is worse than in passive mode). Suspension controlled by Groundhook algorithm can, in contrast to passive settings, achieve better grip for higher currents in activated state \(b_{2H}\). Courses show that the longer is the MR damper response time, the smaller is the best reachable grip.
3.4 Modified Groundhook algorithm
Figure 8 compares the suspension quality of Modified Groundhook algorithm with three variants of MR damper response time. Figures show that if the response time of MR damper is short (1.5 ms), the algorithm provides (for higher currents in activated state) significantly better grip in comparison with passive variant. On the contrary, for currents lower than 1.4 A in activated state is comfort worsened in comparison with passive mode. Therefore it is not advantageous to use this algorithm in the given working range. Good results can also be achieved, when the current in non-activated state is 0.3 A. In this case, the comfort is the same for small currents in activated state, but better comfort can be achieved for higher currents in activated state in comparison with the variant when the current in non-activated state is 0 A. The comparison of Modified Groundhook algorithm and Groundhook algorithm (Fig.7) shows that it is possible to achieve better results with Modified Groundhook algortihm for response time of the MR damper shorter than 1.5 ms. If the response time of MR damper is too long (20 ms), slightly better comfort can be achieved in comparison with passive mode.
3.5 Model validation

Unsprung mass acceleration—comparison of model and experiment
Figure 9 shows the course of unsprung mass acceleration during simulation of cross-over bump test at speed 10 km/h (dashed line) and the course of unsprung mass acceleration during ride test over speed bump for speed 10 km/h with experimental trolley (continuous line). The plot shows that results from simulations are in accordance with results from the measurement.

Contact force (force of the wheel on the road)—comparison of model and experiment
Figure 10 shows the course of the wheel force on the road simulator (with the damper’s current 1 A). For evaluation purposes, the signal from experiment is filtered by low-pass filter (10th order, cutoff frequency 50 Hz). Considering unsprung mass natural frequency (17.8 Hz) and high order of the filter, such filter cannot influence the results.
The results of suspension quality with passive setting and controlled by Modified Groundhook were proved by measurements (Fig. 11). If the response time of MR damper is too long (20 ms), slightly better comfort can be achieved in comparison with passive mode. The courses will be, however, dependent on the shape of the bump and experimental trolley settings (tyre pressure, weight etc.). The explanation is in Fig. 12. Before the bump, the damper is in the non-activated state (low damping). In phase II, the command for switching the damper into activated state arrives. But the force does not change at once, but grows gradually (exponential dependency) because of the dynamics of the MR damper (see Fig. 12, dashed line).

experimental results—modified groundhook algorithm

Simulation of modified groundhook algorithm
It is possible to express this exponential dependency (if the response time constant \(T\) of the MR damper is known) as the rate of actual force dependent on the time of switching the current on (respectively off) to the steady-state force—Fig. 12, dashed line.
After switching the current on, the rate of actual force to the steady-state force (for the same velocity) can be counted as:
After switching the current off, the rate of actual force to the steady-state force in off state (for the same velocity) can be counted as:
where: \(k\) is actual rate, \(k_0\) is rate at the moment of switching on (respectively off), \(t\) is time from switching on (respectively off), \(T\) is response time of the MR damper.
The actual force can be expressed from the equation:
where: \(F_A\) is actual force, \(F(v,I)\) is steady-state force obtained from F-v dependency for given velocity and current.
Figure 12 shows, that because of long response time of the MR damper, the force between the non-activated state and activated state changes only in a small range and the course of real force is phase shifted to the desired force.
4 Conclusions
Measurement of the semiactive suspension quality controlled by Modified Groundhook algorithm showed no improvement to passive mode if MR damper of classical construction is used. The reason seems to be the response time of the MR damper. When the response time of the MR damper was implemented into the simulation model, the simulations with MR damper with response time 8 ms and 20 ms corresponded with measurements. Simulations show that if MR damper with response time 1.5 ms is used in semiactive suspension controlled by algorithm Modified Groundhook, significant improvement of tyre grip can be expected. These conclusions are, however, based only on the results from simulations. Experimental verification was not conducted, because a MR damper with such short response time is not available. Considering existence of MR devices with response time \(\le \)1.5 ms, possibility of development of MR damper with such response time is realistic. At the same time it is necessary significantly change the conventional design of MR dampers. The simulations of semiactive suspension controlled by Groundhook algorithm showed that response time of MR damper significantly influences the suspension quality. If MR damper with response time 20 ms is used, the possible grip improvement to passive mode is small. The shorter is the MR damper response time, the higher is the efficiency of control algorithm. The Skyhook algorithm simulations also showed the influence of response time on the suspension quality. This algorithm is, however, influenced less by the MR damper response time. The comfort improvement can be achieved even with MR damper with response time 20 ms. The best possible comfort is achieved with MR damper with short response time.
References
Ahmadian M, Goncalves FD, Sandu C (2005) An experimental analysis of suitability of various semiactive control methods for magneto-rheological vehicle suspensions. In: Smart structures and materials, international society for optics and photonics, pp 208–216
Balamurugan L, Jancirani J, Eltantawie M (2014) Generalized magnetorheological (mr) damper model and its application in semi-active control of vehicle suspension system. Int J Automot Technol 15(3):419–427. doi:10.1007/s12239-014-0044-4
Eslaminasab N, Golnaraghi M (2007) The effect of time delay of the semi-active dampers on the performance of on-off control schemes. In: Proceedings of IMECE2007, ASME
Goncalves FD, Ahmadian M, Carlson J (2006) Investigating the magnetorheological effect at high flow velocities. Smart Mater Struct 15(1):75
Karnopp D, Crosby MJ, Harwood RA (1974) Vibration control using semi-active force generators. ASME J Eng Ind 96(2):619–626
Kim RK, Hong KS (2007) Skyhook control using a full-vehicle model and four relative displacement sensors. In: International conference on control, automation and systems, 2007. IFCCAS’07. IEEE, pp 268–272
Koo JH, Ahmadian M, Setareh M (2003) Experimental evaluation of magnetorheological dampers for semi-active tuned vibration absorbers. In: Smart structures and materials, international society for optics and photonics, pp 83–91
Koo JH, Goncalves FD, Ahmadian M (2006) A comprehensive analysis of the response time of mr dampers. Smart Mater Struct 15(2):351
Maas J, Güth D (2011) Experimental investigation of the transient behavior of mr fluids. In: ASME (2011) conference on smart materials. ASME, adaptive structures and intelligent systems
Nguyen Q, Choi S, Park Y (2012) An analytical approach to optimally design of electrorheological fluid damper for vehicle suspension system. Meccanica 47(7):1633–1647. doi:10.1007/s11012-012-9544-3
Poussot-Vassal C, Spelta C, Sename O, Savaresi S, Dugard L (2012) Survey and performance evaluation on some automotive semi-active suspension control methods: a comparative study on a single-corner model. Annu Rev Control 36(1):148–160
Spaggiari A, Dragoni E (2012) Efficient dynamic modelling and characterization of a magnetorheological damper. Meccanica 47(8):2041–2054. doi:10.1007/s11012-012-9573-y
Strecker Z, Mazůrek I (2012) Semiactive damper in an experimental trolley suspension. In: Proceedings of the 53rd international conference of machine design departments, pp 281–286
Sulaiman S, Samin PM, Jamaluddin H, Rahman RA, Burhaumudin MS (2012) Groundhook control of semi-active suspension for heavy vehicle. Int J Res Eng Technol 1(3):146–152
Valášek M, Kortům W, Šika Z, Magdolen L, Vaculín O (1998) Development of semi-active road-friendly truck suspensions. Control Eng Pract 6(6):735–744
Wang E, Ying L, Wang W, Rakheja S, Chunyi S (2008) Semi-active control of vehicle suspension with magneto-rheological dampers: part i-controller synthesis and evaluation. Chin J Mech Eng 21(1):13–19
Wang W, Song Y (2012) Nonlinear vibration semi-active control of automotive steering using magneto-rheological damper. Meccanica 47(8):2027–2039. doi:10.1007/s11012-012-9572-z
Yang G, Spencer BF Jr, Jung HJ, Carlson JD (2004) Dynamic modeling of large-scale magnetorheological damper systems for civil engineering applications. J Eng Mech 130(9):1107–1114
Yao G, Yap F, Chen G, Li W, Yeo S (2002) Mr damper and its application for semi-active control of vehicle suspension system. Mechatronics 12(7):963–973
Acknowledgments
This work is an output of cooperation between FSI-S-14-2329, GAČR 13-31834P and NETME Centre, regional R&D centre built with the financial support from the Operational Programme Research and Development for Innovations within the project NETME Centre (New Technologies for Mechanical Engineering), Reg. No. CZ.1.05/2.1.00/01.0002 and, in the follow-up sustainability stage, supported through NETME CENTRE PLUS (LO1202) by financial means from the Ministry of Education, Youth and Sports under the “National Sustainability Programme I”.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Strecker, Z., Mazůrek, I., Roupec, J. et al. Influence of MR damper response time on semiactive suspension control efficiency. Meccanica 50, 1949–1959 (2015). https://doi.org/10.1007/s11012-015-0139-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-015-0139-7