
Abstract
Eelgrass (Zostera marina) is an important feature of coastal ecosystems in Atlantic Canada, providing a suite of valuable ecosystem services. These services, and its sensitivity to stressors, have prompted efforts to characterize the spatial and temporal dynamics of eelgrass landscapes in order to facilitate management and monitoring of coastal ecosystem health. Current methods for broad-scale mapping of eelgrass rely on aerial remote sensing and may not be appropriate in certain types of landscapes, particularly in turbid waters and areas lacking distinct boundaries. This study takes a novel approach to the quantification and analysis of seagrass landscape structure at multiple spatial scales using acoustic data and local spatial statistics. Data from a single-beam acoustic survey in Richibucto, New Brunswick, Canada were analyzed with geostatistical techniques and the Getis-Ord G * i local spatial statistic in order to detect statistically significant zones of high and low cover in an estuarine seagrass bed. Results showed distinct and significant patterns in seagrass cover at multiple spatial scales within a region of apparently continuous spatial cover. Boundaries between areas of high and low cover were also detected. This study demonstrates how acoustic data and local spatial statistics can be used to quantify landscape pattern and to further the application of landscape techniques in the marine environment.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Seagrasses are widely recognized as important features of coastal areas, acting as ecosystem engineers and providing a suite of ecosystem services that ranks among the most valuable worldwide (Costanza et al. 1997; Barbier et al. 2011). They provide a significant source of primary production, influence hydrodynamic and sedimentary regimes, regulate nutrient cycling, and provide habitat and substrate for a variety of species (Orth et al. 2006). They are also sensitive to environmental change and disturbance, with extensive declines reported globally resulting from stressors acting over multiple spatial and temporal scales (Waycott et al. 2009). In particular, seagrasses are vulnerable to direct physical disturbance and declining water quality resulting from watershed and coastal development. Despite recognition of the threats to seagrass ecosystems, conservation efforts have been limited by a lack of knowledge regarding their present extent and the ecological processes regulating their spatial distribution (Duarte 2002). Given the ecological importance of seagrass habitat, there is a strong need for methods to characterize and monitor its distribution, and to assess and predict the potential impacts of changing environmental conditions in coastal ecosystems.
Seagrasses form habitat mosaic patterns of varying configurations ranging from highly fragmented to continuous meadows over a continuum of spatial scales (Duarte et al. 2006). Their spatial arrangement can be expressed through the conceptual framework of landscape ecology, where a simplified landscape consists of a heterogeneous mosaic of seagrass patches embedded in a background matrix of unvegetated soft sediments (Robbins and Bell 1994; Turner et al. 2001). The landscape ecology framework commonly involves the use of quantitative spatial pattern metrics or indices to quantify important aspects of habitat spatial pattern such as patch size, shape, configuration, and composition (O’Neill et al. 1988). Though the extension of these techniques to the marine realm has been limited by difficulties in acquiring and processing data, recent advances in remote sensing technology and geographic information systems (GIS) have increased the ability of researchers to acquire spatially explicit data and apply quantitative spatial analyses to marine ecosystems (Hinchey et al. 2008; Boström et al. 2011).
The application of landscape analysis techniques to seagrass ecosystems is a recent occurrence (Robbins and Bell 1994), and it is as yet unknown which data models and statistical techniques best represent the spatial structure of seagrass landscapes (Sleeman et al. 2005; Bell et al. 2006). Recent reviews have highlighted the need for further research on seagrass landscapes from both theoretical and practical perspectives, particularly regarding its use for the assessment and monitoring of landscape change (Boström et al. 2011; Wedding et al. 2011). Beyond the marine context, the application of landscape ecology methods with ever-improving remote sensing platforms and consideration of associated uncertainty and errors remains an active area of research (Wu and Hobbs 2002).
Data representing seagrass patch structure are primarily drawn from aircraft or satellite-based optical sensors (McKenzie et al. 2001; Dekker et al. 2006). These methods are relatively inexpensive compared to direct sampling and provide synoptic coverage and high-resolution data. However, aerial methods are influenced by water clarity and weather conditions, require extensive ground-truthing, and create binary or categorical maps of seagrass presence-absence that can be strongly affected by spatial scale and classification bias (Wagner and Fortin 2005). These categorical representations of landscape structure, consistent with the “patch-mosaic” or “patch-matrix” landscape models derived from island biogeography (MacArthur and Wilson 1967; Wedding et al. 2011), apply well to fragmented seagrass beds showing distinct patch structure and unambiguous boundaries. However, seagrasses often grow in what appears to be continuous coverage as designated by optical remote sensing. Meaningful within-patch spatial patterns exist in these areas that are difficult to resolve accurately using standard optical methods, particularly in turbid waters. In these cases, the patch-matrix model of landscape structure may be inappropriate, necessitating a different model for the depiction of landscape structure in continuous seagrass beds.
Hydroacoustic methods are an alternative approach for mapping seagrass spatial structure at a scale intermediate to direct physical sampling and optical remote sensing. Single-beam sonar has been shown in several studies to provide an effective, sensitive, and repeatable mapping technique for several species of aquatic macrophytes in both freshwater and marine systems (Sabol et al. 2002; Sabol et al. 2009). Aquatic vegetation exhibits strong acoustic reflectivity due to the presence of oxygen and other dissolved gases present in plant tissues (Sabol et al. 2002; Warren and Peterson 2007; Paul et al. 2011). This signature can be extracted from acoustic data to provide the high-resolution broad-extent data required for landscape analysis. Though acoustic methods can also be negatively impacted by some weather conditions (e.g. waves), these effects are minimal compared to aerial methods, and water clarity is not a limiting factor in the shallow waters preferred by seagrasses. Acoustic data can be acquired without the extensive labor required for direct sampling and without the high costs and operational constraints of aerial optical methods. Single-beam sonar can also provide accurate measures of water depth, canopy height, and percent cover, going beyond binary measures of presence-absence and improving the thematic resolution of output maps.
Despite the apparent advantages of acoustic techniques, quantitative studies of seagrass landscape structure using acoustic data are rare or nonexistent. Previous studies examining seagrass with single-beam sonar have focused on the production of maps through contouring or geostatistical interpolation procedures such as kriging (e.g. Guan et al. 1999; Valley et al. 2005). These maps provide synoptic broad-scale depiction of the seagrass bed, though the interpolation process tends to smooth the data, underestimating the spatial variability inherent in the landscape, particularly in patchy environments (Fortin and Dale 2005). These interpolated maps are often unable to delineate distinct patch boundaries, and as such are unable to provide data suitable for the application of many patch-focused indices common in terrestrial landscape ecology. The ability of acoustic methods to measure percent cover of aquatic vegetation at high resolution and broad extent in turbid coastal waters should allow for the detection of heterogeneity and patch structure at a scale inaccessible to aerial methods. Nonetheless, this capability has not yet been demonstrated in the literature.
A variety of methods for the analysis of ecological spatial structure have been developed, each with specific goals and assumptions (Fortin and Dale 2005). Global spatial statistics (e.g. Moran’s I, Geary’s c) and related geostatistical methods such as variography and kriging are commonly applied techniques that estimate spatial autocorrelation over the entire study area. While useful in many systems, these approaches fail to capture local patterns by summing and averaging variability in the dataset as a function of distance without consideration of location (Fortin and Dale 2005). In most naturally occurring landscapes where several processes interact to create apparent structure, it is likely that the magnitude of each process varies over the study area resulting in distinct areas or patches (Legendre and Legendre 1998). These processes commonly occur over a wide range of spatial scales and interact non-linearly, complicating the interpretation of ecological relationships. Furthermore, these interactions violate the assumption of stationarity required for global measures of spatial autocorrelation, including assessment of significance.
In contrast to global measures, local spatial statistics are applied to examine local patterns in the intensity of spatial dependence. This group of methods (e.g. local Moran’s I, local Geary’s c, Getis-Ord G i and G * i ) are commonly referred to as local indicators of spatial association, or LISA (Anselin 1995). These statistics can be used to locate clusters of similar values higher or lower than the mean that represent local patterns of spatial dependence, commonly termed “hot spots” and “cold spots” respectively (Nelson and Boots 2008). As a tool for exploratory spatial data analysis, these operators can be calculated at multiple local neighborhood sizes in order to assess the scale-dependence of detected patterns. Local spatial statistics have previously been applied to the quantification of terrestrial patterns derived from aerial remote sensing (Wulder and Boots 1998), the mapping of patterns in marine sediments (Harris and Stokesbury 2010), and detection of patch boundaries in simulated datasets (Philibert et al. 2008), but have not previously been applied to seagrass ecosystems.
The purpose of this study was to utilize remote sensing techniques with local spatial statistics to develop methods appropriate for detecting patch structure at a scale relevant to an estuarine seagrass bed. Single-beam acoustic data representing the seagrass landscape were collected, processed, and analyzed with the Getis-Ord G * i LISA statistic (Getis and Ord 1992). These clusters were then used to quantify localized patches of high and low cover and produce spatial maps of their distribution. This approach is intended to facilitate the assessment, monitoring, and management of these ecologically valuable and vulnerable ecosystems.
Methods
Study site and acoustic survey
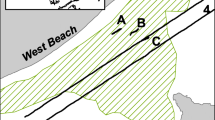
The Richibucto estuary is located on the eastern coast of New Brunswick, Canada in the southern Gulf of St. Lawrence (64°51′W, 46°42′N) (Fig. 1). It is a semi-enclosed barrier island system that is similar in characteristics to several other estuaries along the New Brunswick Gulf coastline. The estuary is fed by the Richibucto, Aldouane, and St. Charles Rivers, representing a primarily suburban, agricultural, and forested watershed. Oyster and mussel aquaculture occurs in moderate densities throughout the estuary.

Map of the Richibucto estuary with the primary study location highlighted. Inset Location in eastern Canada
The study site was located in a basin of the northwestern branch of the estuary, characterized by depths of 1–2 m outside of a narrow channel that reaches up to 7 m in depth. Tidal range at the site is approximately 1–2 m (Guyondet et al. 2005). A large peninsula that is part of the adjacent Kouchibouguac National Park shelters the study site from most wind-generated wave action. Eelgrass (Zostera marina) occurs subtidally throughout the estuary (excepting the channel), and areas where eelgrass is absent occur as bare sediment. The sediments consist mostly of muddy sand with relatively uniform grain size (Lu et al. 2008).
Acoustic data were collected using a vertically-oriented 430 kHz 6.2° beam angle transducer and BioSonics DE-X echosounder mounted on a small vessel. This high-frequency acoustic system is optimal for detecting aquatic vegetation with high accuracy (Sabol et al. 2002). The narrow beam angle results in a small footprint size, balancing resolution and spatial coverage along the sampled transect. Given the 6.2° beam angle, the circular footprint of a single ping at 1 m depth has a diameter of 11 cm (0.01 m2). To avoid sonic saturation due to shallow depth, a power-reduction setting of −8.8 dB and pulse duration of 0.1 ms were used. The echosounder system generated acoustic pings at a rate of 5 Hz. All acoustic data were georeferenced with a JRC differential GPS (DGPS) with positional accuracy of approximately 3 m recording positions at a frequency of 1 Hz. The receiver was linked to DGPS reference station 332 in Port Escuminac, New Brunswick (64°48′W, 47°04′N).
The acoustic survey was conducted on 10 October 2007 at high tide in calm conditions. Data were collected on transects separated by 30–50 m where possible. The survey vessel was kept at a constant speed of 2 m s−1 (7.2 km h−1) to minimize noise and disruptive cavitation around the transducer face and to maintain consistent spatial coverage. Ground-truthing data for verification were collected with an underwater video camera deployed at several locations throughout the study site. The camera was used to observe the seafloor directly below the transducer for seagrass presence/absence and later compared to ping output reports for verification.
Data processing and analysis
Characteristics of the seagrass bed were extracted from raw acoustic data using BioSonics EcoSAV v1.2 software. The software is based on a heuristic algorithm designed by the US Army Corps of Engineers to extract distinctive features from each acoustic ping to determine the water depth, canopy height, and presence or absence of seagrass (Sabol et al. 2002). These values are then summarized for a collection of sequential pings and output as report points. Each output point contains measures of the percent cover of vegetation (‘plant’ pings divided by total pings per cycle), mean canopy height for ‘plant’ pings, and mean water depth. The accuracy of the algorithm has been independently tested and verified for several species of macrophytes in diverse environments (Guan et al. 1999; Sabol et al. 2002; Valley et al. 2005).
The analysis procedure georeferences the acoustic data by summarizing all pings between two DGPS positions. With DGPS positions recorded at 1 Hz and a ping rate of 5 Hz, this results in one report every 2 s. Through the course of analysis it was observed that this would result in uneven ping counts per report point due to a slight offset between the ping rate and GPS time. The software settings were therefore adjusted in order to ensure that each report represented a consistent spatial data support of 15 pings. This provides a balance between consistent spatial coverage for each point and maximum geospatial accuracy. Minor adjustments were also made to the default analysis settings to account for the power reduction setting and ambient temperature and salinity conditions. To streamline data processing and prevent false detection of vegetation, a depth limit of 3 m was imposed, as no vegetation was observed below this depth in the study area.
Acoustic measurements of water depth and canopy height were corrected to account for changes in tidal height over the survey duration and the depth of the transducer face in the water column. The resulting data were output as XYZ comma-separated text files and converted into ESRI shapefile format for GIS analysis. The relationship between water depth and seagrass percent cover was explored using Pearson’s correlation.
Global spatial autocorrelation was assessed through the analysis of variograms using ArcGIS v10 (Geostatistical Analyst extension) and SpaceStat v2.1 software. Variograms were modeled for a range of lag sizes to best represent the spatial structure of the site and the scale of sampling. Both isotropic and anisotropic variograms were examined to detect any directionality (anisotropy) in the dataset. A variogram map was created to provide a visual depiction of anisotropy in the landscape. The variogram map was constructed according to values derived from the variogram, with a lag size range of 2–200 m. Additionally, an interpolated map of percent cover was produced through ordinary kriging based on the isotropic variogram for visual comparison to Getis-Ord G * i results.
Local regions with percent cover values higher or lower than the overall mean were identified by calculating the Getis-Ord G * i statistic. G * i is a local spatial statistic that measures the ratio of the weighted local neighborhood sum to the overall dataset:
where d is neighborhood size, W ij is the weight matrix of sample location i and its neighbor(s) j, and x is the quantitative variable of interest. The G * i statistic differs from the related Getis-Ord G i in that the sample location itself (the ego) is included in each calculation (i = j). The equation produces a z-score where high values (G * i ≥ 2) represent local clusters of high values relative to the whole area, also referred to as “hot spots”, while low values (G * i ≤ −2) represent “cold spots”.
The neighborhood size and weights can be set to a constant search radius or can be variable to include the same number of neighbors in each calculation. The constant radius approach was taken in order to maintain consistent spatial resolution. The G * i statistic was initially calculated for five neighborhood search radii (10, 20, 30, 40, and 50 m) in order to determine the optimal analysis scale and to visualize the effects of altering spatial scale on the statistic. Neighboring point weights were standardized within each search area. The expected value of G * i under the assumption of complete spatial randomness depends on the number of neighboring points, but has been shown to approximate a normal distribution when n ≥ 8 neighbors (Ord and Getis 1995). The number of neighboring points within the search radius were tallied for each point in order to meet this criterion (i.e. the number of j around each i, for each of the 5 distance classes).
Significance testing was conducted through a Monte Carlo randomization procedure (n = 999 simulations) with a null hypothesis of complete spatial randomness. The Simes correction (Simes 1986) was applied to adjust p-values to account for multiple comparisons, as each sample location i is included in the neighborhood calculation for several neighboring points (Boots 2002). The Simes correction is less conservative than the similar Bonferroni procedure, allowing the detection of significance in the presence of highly correlated test statistics. Notably, there are difficulties associated with the assessment of statistical significance with the presence of multiple testing and global spatial autocorrelation. Accordingly, local spatial statistics were used in the context of exploratory spatial data analysis as per suggestions in the literature (Boots 2002; Fortin and Dale 2005).
Formulation of seagrass patch polygons from punctual hot and cold spots was conducted with ArcGIS v10 software. Buffer rings of a size matching each neighborhood search radius were drawn around each statistically significant cluster location. Groups of buffer rings of the same class were merged into polygons representing a contiguous neighborhood zone for both hot and cold spots. Overlapping zones were identified to indicate boundaries or areas of rapid change between high and low seagrass cover. Data values of the points falling within these polygons were then compiled and summarized to describe the seagrass characteristics within each class of polygon.
Results
Acoustic survey
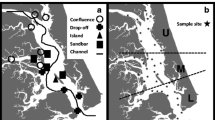
The acoustic survey produced a total of 2,677 output points over a total transect length of 14.7 km, sub-sampling an extent of 29.7 ha (Fig. 2). Mean seagrass cover was 41.8 ± 18.1 % (SD). The distribution of percent cover values was approximately normal. Notably, only 21/2677 points (<1 %) registered a value of 0 % cover, indicating that at least a small quantity of seagrass was present throughout nearly the entire study area. Water depth was relatively uniform with a mean depth of 1.39 ± 0.12 m (SD). No notable relationship was found between water depth and percent cover over the surveyed area (Pearson’s R = 0.124).

Above Acoustic data tracks, showing the distribution of percent cover values. Below Histogram of the distribution of percent cover values
Geostatistical analysis
Geostatistical procedures were initially used to assess spatial autocorrelation structure and anisotropy in the dataset. A variogram map was produced to graphically depict any directional trend indicating the presence of anisotropy in the dataset (Fig. 3). The variogram map is a geometric representation of variance in the dataset, with directionality preserved so that each pixel represents the sum of all data pairs at that direction and distance from the center of the map. Minimum variance was found in approximately the north-south direction, indicating the presence of anisotropy. This was reflected in observed differences between the omnidirectional and anisotropic variograms (Fig. 4).

Variogram map depicting anisotropy in the dataset with a lag size range from 2 to 200 m

Above Modeled omnidirectional variogram. Below anisotropic empirical variograms representing the east-west (crosses) and north-south (points) axes
The omnidirectional variogram of seagrass percent cover was modeled to show a range of 143 m, a sill equivalent to the variance of the dataset at 0.0327, and a nugget effect of 0.014 (42.8 % of variance), representing measurement errors and any variation occurring at a spatial scale less than that of distance between sampling points (Fig. 4). The bi-directional anisotropic variogram reflects the directionality visible in the variogram map, with the north-south axis curve exhibiting a smaller sill and shorter range than the east-west axis. This pattern is consistent with zonal anisotropy (Goovaerts 1997).
The percent cover dataset was interpolated to produce a smoothed surface through ordinary kriging implemented with ArcGIS Geostatistical Analyst (Fig. 5). The resulting map shows a contoured representation of seagrass cover within the study area. This map does not facilitate the application of patch-focused landscape analysis, as boundaries are not discernible. However, it is possible to see distinct patterns, and note that the anisotropy indicated through variography is likely due to locally clustered patches of high cover in the northwest corner of the study area and low cover throughout the central, southern and eastern regions.

Map of seagrass percent cover interpolated using ordinary kriging
Local spatial statistics
The Getis-Ord G * i statistic identified acoustic report points representing significant hot and cold spots, or regions of locally high and low mean percent cover respectively, at each of the five spatial scales examined. Between 10 and 22 % of the dataset points (n = 2677) were identified as significant hot or cold spots at each scale (Table 1). The largest number significant hot and cold spots were found at a search radius of 30 m.
The mean number of neighbors for each significant point (i.e. the number of j for each i) grew with increasing neighborhood radius (Table 1). At a search radius of 10 m, the mean number of neighbors was insufficient to meet the assumption of normality (n ≥ 8) as recommended by Ord and Getis (1995). At a search radius of 20 m, the mean number of neighbors exceeded this threshold, but the minimum did not. Accordingly, subsequent analysis focused on the 30, 40, and 50 m neighborhood radius sizes to ensure that this assumption was treated consistently.
Neighborhood statistics indicated that percent cover in hot spots was consistently higher than in cold spots (Table 2). This difference decreased with increasing neighborhood size as the patches aggregated into larger areas and encompassed a larger number of neighboring points. The within-patch variance remained relatively uniform at each scale, and was smallest at the 30 m neighborhood radius.
Patches representing contiguous neighborhoods of hot and cold spots at each spatial scale produced a visual pattern that was similar to the interpolated map, with a region of high percent cover in the northwest, a large central patch of low percent cover, and smaller variable patches throughout the remainder (Fig. 6). This distributional pattern, and the total number of hot and cold patches, remained mostly consistent regardless of the neighborhood radius definition.

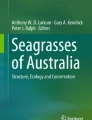
Zones of high and low seagrass cover as derived from G * i analysis for A 30 m, B 40 m, and C 50 m neighborhood search radii. Overlap zones are indicated in blue
Zones of overlap occurred between the neighborhoods of hot and cold spots at each spatial scale. These regions correspond to areas of rapid change in seagrass cover that can be considered analogous to patch boundaries or ecotones. The amount of overlap area increased with neighborhood size. A small number of significant points fell within the overlap areas at two of the three analysis scales (15 points at 40 m scale; 2 points at 50 m scale). For these points, the neighborhood encompasses both hot and cold spots and likely indicates an especially sharp gradient of change. These points also may indicate that the neighborhood size is too large, suggesting that the optimal spatial scale for detecting pattern is less than 40 m.
Discussion
G * i considerations
The use of local spatial statistics in this study provided information on local spatial heterogeneity not captured at the scales commonly used for monitoring, and explicitly described pattern at multiple spatial scales as defined by the neighborhood search radius. Of the three spatial scales considered, the 30 m neighborhood radius appears to best characterize the local variability within the study area (Fig. 6a). Analysis at this scale detected the largest proportion of significant hot and cold spots, represented the largest difference in neighborhood percent cover (52.3 % in hot spots vs. 31.6 % in cold spots), and resulted in the lowest within-patch variance. This scale also produced the smallest area of overlap between hot and cold neighborhoods, and resulted in no significant points occurring in overlap zones. However, all three spatial scales produced maps with similar numbers and distributional patterns of hot and cold spots, highlighting the robust nature of the technique.
When conducting multi-scale analysis, it is important to differentiate between scales of observation and analysis (Qi and Wu 1996). The scale of observation can be adjusted through manipulating the spacing and orientation of survey tracks, boat speed, or software data collection settings. In contrast, the analysis scale can be adjusted by changing the neighborhood size when calculating G * i . The interaction between observation scale (i.e. transect spacing) and analysis scale (neighborhood radius) in seagrass beds is not well understood, as site-specific factors can result in variation over very short distances.
Global measures of spatial association generally require assumptions and prior knowledge of habitat structure that is often unavailable prior to study design. Further, it is often not possible to determine a single ‘correct’ scale when the magnitude and directionality of variation changes over relatively small extents, as in this study (i.e. Fig. 3). A major strength of the LISA approach is the ability to detect localized patterns and define characteristic scales of variation in complex systems without prior knowledge of habitat structure. This allows the detection of distinct regions regardless of spatial scale without requiring the assumptions of global methods, and broadens the applicability of the method to many different types of seagrass beds.
Analysis of the proximity of high and low clusters detected by local spatial statistics can provide information on the locations of boundaries separating distinct within-patch regimes. Areas of overlap in the neighborhoods around high and low cluster points may be of particular interest, indicating zones of rapid change in seagrass cover (Fig. 6). These areas may be considered analogous to boundaries between distinct regions, or ecotones: transitional zones between ecological communities (Hufkens et al. 2009). The detection and analysis of boundaries is an important part of landscape ecology, and has been widely applied in terrestrial systems. In the context of aquatic vegetation, prior research has focused on how boundaries affect fauna, particularly in patchy areas with clearly defined boundaries. In contrast, the overlap areas detected in this study represent 2D boundary zones between distinct areas within an extent of mostly continuous seagrass cover. Boundary characteristics such as width, magnitude of change, position, and orientation could be quantified and studied in the landscape context. Better understanding of how to detect and analyze boundaries in seagrass habitat has previously been recognized as an important area of future research (Bell et al. 2006).
In a few instances, a small number of hot or cold spots were fell within overlapping boundary areas (Fig. 6). This most likely indicates an especially sharp gradient of change; for these hot and cold spots, adjacent neighborhoods are determined to be significantly dissimilar despite sharing a large number of data points between both ‘hot’ and ‘cold neighborhood zones. The presence of overlap implies that the analysis scale (neighborhood radius) is too large to detect structure in these areas. Depending on the sharpness of the boundary, these areas may or may not have been detected with aerial imaging.
Notably, hot and cold spots are defined according to the structure of the sampled area, as they are calculated relative to the site mean. Accordingly, the interpretation of “hot” and “cold” is site-specific and requires additional contextual considerations when comparing disparate locations. For example, a cold spot in a highly fragmented or patchy bed may contain little to no seagrass, while in a dense continuous meadow an area identified as “cold” may still contain substantial plant biomass, though at a level below the site mean.
Implications for landscape analysis
The ability to detect and quantify landscape pattern is strongly influenced by the spatial scales of mapping and analysis relative to the features of interest (Wiens 1989; Wedding et al. 2011). Landscape indices are highly sensitive to scale and are at risk for scale mismatch, where landscape elements can be obscured or misrepresented if examined at an inappropriate scale (Qi and Wu 1996). Recognition of these issues and analysis of the associated errors and uncertainties is crucial when applying the results of landscape analysis.
While many landscape studies of seagrass ecosystems have attempted to quantify spatial patterns of patch structure, these have been primarily based on categorical thematic maps derived from aerial remote sensing data (Wedding et al. 2011). The analysis of aerial imagery has long been the standard method for mapping aquatic macrophytes, offering a relatively low-cost and repeatable method for surveying large areas (McKenzie et al. 2001). However, the classification of aerial imagery of marine environments is fraught with uncertainty, and errors can propagate through to the results of landscape analyses (Shao and Wu 2008). Aerial sensors can be negatively affected by weather conditions, and are subject to confounding effects from water depth and clarity that can be further exacerbated by classification bias. Although aerial photography and some satellite sensors are able to achieve sub-meter spatial resolution, these methods have limited thematic resolution, or ability to discern between different patch classes. In effect, image classification reduces the landscape to a binary map of seagrass presence/absence, potentially resulting in significant data loss and classification errors. The presence/absence threshold for detection of seagrass in a given pixel for is also unknown. These errors are often ignored or unreported despite the widespread use and increasing availability of remote sensing data of seagrass beds. Accordingly, issues associated with accuracy and unidentified error are recognized as a main research priority in the field of landscape ecology (Wu and Hobbs 2002).
Acoustic survey methods hold a major advantage over aerial remote sensing in their ability to quantify seagrass cover at and below the patch scale. Image analysis is able to achieve high accuracy when differentiating between gross vegetated and unvegetated areas, but is less able to detect transition zones or within-patch patterns. The use of local spatial statistics in conjunction with acoustic data in this study demonstrated a method for detecting clusters of anomalously high and low values in what would otherwise be classified as a patch or area of continuous cover, quantifying an aspect of seagrass spatial structure inaccessible to aerial remote sensing. These areas may be of particular interest to habitat managers, as the ability to detect within-patch changes prior to visually apparent fragmentation could be very valuable to conservation efforts. This approach also allows for the identification of areas of interest for future studies, as well as conservation and restoration efforts, such as local regions of exceptionally high or low cover, or boundary zones that may be of great importance for faunal interactions (Boström et al. 2006).
Most prior studies using single-beam sonar to map seagrasses have used the output to interpolate continuous broad-scale maps representing SAV distribution at landscape scale (e.g. Guan et al. 1999; Valley et al. 2005). These representations have proven useful for monitoring long-term change, but are much less effective for quantifying spatial structure at and below the patch level. Interpolation in these cases is used to predict or estimate seagrass cover in unsampled locations, and is by nature a smoothing process that overestimates low and underestimates high values. In contrast to these broad-scale mapping exercises, this study demonstrates the use of acoustic data to detect and quantify local spatial patterns at the patch level in a manner consistent with a landscape model of heterogeneity. The quantification of characteristic scales of variability at the patch level is critical for monitoring the disturbance and fragmentation of valuable seagrass habitat. Patch scale has many important implications for both the persistence and loss-gain dynamics of seagrass itself (Fonseca et al. 2002; Duarte et al. 2006), and for the ecosystem services it provides to diverse faunal communities (Boström et al. 2006). The methods outlined here are able to detect changes in habitat distribution and configuration beyond simple loss and gain, adding a valuable extra dimension to the study and management of seagrasses and marine habitat in general.
Not all types of marine data are suitable for analysis within the dominant patch-matrix paradigm of landscape structure, where the landscape consists of a mosaic of discrete patches with clear boundaries dispersed throughout a background matrix. When boundaries are not readily apparent, such as in beds that appear continuous to remote sensing, it is difficult to apply common landscape metrics that utilize spatial patch characteristics such as area and perimeter. However, as this study demonstrated, there is still spatial structure in these areas that can be quantified to increase our understanding of seagrass structure and the mechanisms that create and maintain it. Although the patch-matrix model has proven to be of great value in diverse ecosystems both terrestrial and marine, it is unable to describe continuous variation without significant loss of information (McGarigal et al. 2009). Recent work has begun to describe ways of quantifying continuous heterogeneity outside of the patch-matrix paradigm, such as through surface metrics designed for 3D landscape patterns such as those found in topographical analysis (Hoechstetter et al. 2008; McGarigal et al. 2009). Although not pursued in the current study, acoustic seagrass detection can also measure the canopy height of vegetation, providing further information on habitat structure and indicating the potential to extend analysis of within-patch variability to three dimensions (Sabol et al. 2002; Valley et al. 2005). This 3D approach may be particularly valuable for elucidating fine-scale patterns in habitat as experienced by fauna. Further modifications to the traditional landscape model, such as in the current study, serve to increase understanding of marine landscape dynamics in areas that do not neatly fit the common framework derived from terrestrial landscape ecology.
Seagrass maps derived from aerial remote sensing overlook local spatial heterogeneity through the process of boundary delineation and patch classification, leading to significant uncertainties and errors. In contrast, acoustic methods provide data at much finer resolution representing the quantitative variation of seagrass cover through space. Analysis of these data through methods such as those described in the present study allow for the quantification of continuous heterogeneity, improving the ability of researchers to describe real-world landscapes. This helps to merge the interrelated concepts of boundary and landscape analysis, allowing for further insights into seagrass landscape structure. Methods for the quantification of structure are required to fuse the continuous and discrete models of landscape structure and allow for comparisons between different sites and bed types (Wagner and Fortin 2005). Integration of diverse sectors of spatial analysis (e.g. landscape metrics, geostatistics, GIS, spatial modeling), will lead to greater understanding of the spatial dynamics of ecological landscapes.
Conclusions
The application of the Getis-Ord G * i LISA statistic to acoustic survey data detected distinct patterns in seagrass distribution within a continuous bed. These results demonstrate the ability of the technique to identify local zones of high or low seagrass cover relative to the mean and an improved way to extract spatial data through remote sensing of seagrass landscapes, especially in areas that would otherwise be described as “continuous”. Beyond maps of seagrass presence or absence, this method allows for the measurement of heterogeneity at multiple spatial scales, providing important information for the design of specific studies, such as the impacts of patch arrangement on faunal interactions (e.g., the use of habitat by slow-moving or sessile organisms such as bivalves vs. highly mobile fish), or the impacts of local versus broad-scale stressors. This approach can help gain a better understanding of the factors and processes that govern seagrass patterns and persistence, with a mind to improving predictive abilities, restoration, and management decisions through statistical modeling or predictive vegetation mapping. Increased understanding of the scale-dependence of seagrass patterns will also assist in the comparisons among and between sites located in different geographic regions, and to deal with scaling issues associated with extrapolating trends from small-scale studies to larger extents.
The information produced through local spatial statistics can be used to help guide the spatial scale of future mapping and monitoring efforts. A fine-scale, small extent acoustic survey such as that conducted here could be used as an exploratory tool to determine the baseline spatial structure and characteristic patch size of a site prior to a more intensive mapping effort. Initial acoustic surveys could complement broad-scale mapping and monitoring by identifying high-priority areas of high or low cover, and as ground-truthing or accuracy assessment for broad-scale aerial remote sensing methods. It also can describe fragmentation and other changes in the arrangement of seagrass throughout a study area that would not be reflected in simple measures of percent cover. These results can be used for the further application of landscape ecology concepts to seagrass habitat and the marine environment in general, and contribute to further understanding of the spatial dynamics of these ecosystems.
References
Anselin L (1995) Local indicators of spatial association—LISA. Geogr Anal 27:93–115
Barbier EB, Hacker SD, Kennedy C, Koch EW, Stier AC, Silliman BR (2011) The value of estuarine and coastal ecosystem services. Ecol Monogr 81:169–193
Bell S, Fonseca M, Stafford N (2006) Seagrass ecology: new contributions from a landscape perspective. In: Larkum AWD, Orth RJ, Duarte C (eds) Seagrasses: biology, ecology and conservation. Springer, Dordrecht, pp 625–645
Boots B (2002) Local measures of spatial association. Ecoscience 9:168–176
Boström C, Jackson E, Simenstad C (2006) Seagrass landscapes and their effects on associated fauna: a review. Estuar Coast Shelf S 68:383–403
Boström C, Pittman S, Simenstad C, Kneib R (2011) Seascape ecology of coastal biogenic habitats: advances, gaps, and challenges. Mar Ecol Prog Ser 427:191–217
Costanza R, d’Arge R, de Groot R, Farber S, Grasso M, Hannon B, Limburg K, Naeem S, O’Neill R, Paruelo J, Raskin R, Sutton P, van den Belt M (1997) The value of the world’s ecosystem services and natural capital. Nature 387:253–260
Dekker A, Brando V, Anstee J, Fyfe S, Malthus T, Karpouzli E (2006) Remote sensing of seagrass ecosystems: use of spaceborne and airborne sensors. In: Larkum AWD, Orth RJ, Duarte C (eds) Seagrasses: biology, ecology and conservation. Springer, Dordrecht, pp 347–359
Duarte C (2002) The future of seagrass meadows. Environ Conserv 29:192–206
Duarte C, Fourqurean J, Krause-Jensen D, Olesen B (2006) Dynamics of seagrass stability and change. In: Larkum AWD, Orth RJ, Duarte C (eds) Seagrasses: biology, ecology and conservation. Springer, Dordrecht, pp 271–294
Fonseca M, Whitfield P, Kelly N, Bell S (2002) Modeling seagrass landscape pattern and associated ecological attributes. Ecol Appl 12:218–237
Fortin M, Dale M (2005) Spatial analysis: a guide for ecologists. Cambridge University Press, Cambridge
Getis A, Ord J (1992) The analysis of spatial association by use of distance statistics. Geogr Anal 24:189–206
Goovaerts P (1997) Geostatistics for natural resources evaluation. Oxford University Press, New York
Guan W, Chamberlain R, Sabol B, Doering P (1999) Mapping submerged aquatic vegetation with GIS in the Caloosahatchee Estuary: evaluation of different interpolation methods. Mar Geod 22:69–91
Guyondet T, Koutitonsky V, Roy S (2005) Effects of water renewal estimates on the oyster aquaculture potential of an inshore area. J Marine Syst 58:35–51
Harris B, Stokesbury K (2010) The spatial structure of local surficial sediment characteristics on Georges Bank, USA. Cont Shelf Res 30:1840–1853
Hinchey EK, Nicholson MC, Zajac RN, Irlandi EA (2008) Preface: marine and coastal applications in landscape ecology. Landscape Ecol 23:1–5
Hoechstetter S, Walz U, Dang L (2008) Effects of topography and surface roughness in analyses of landscape structure—a proposal to modify the existing set of landscape metrics. Landsc Online 1:1–14
Hufkens K, Scheunders P, Ceulemans R (2009) Ecotones in vegetation ecology: methodologies and definitions revisited. Ecol Res 24:977–986
Legendre P, Legendre L (1998) Numerical ecology, 2nd English edn. Elsevier, Amsterdam
Lu L, Grant J, Barrell J (2008) Macrofaunal spatial patterns in relationship to environmental variables in the Richibucto Estuary, New Brunswick, Canada. Estuar Coast 31:994–1005
MacArthur RH, Wilson EO (1967) The theory of island biogeography. Princeton University Press, Princeton
McGarigal K, Tagil S, Cushman SA (2009) Surface metrics: an alternative to patch metrics for the quantification of landscape structure. Landscape Ecol 24:433–450
McKenzie L, Finkbeiner M, Kirkman H (2001) Methods for mapping seagrass distribution. In: Short F, Coles R (eds) Global seagrass research methods. Elsevier, Amsterdam, pp 101–121
Nelson T, Boots B (2008) Detecting spatial hot spots in landscape ecology. Ecography 31:556–566
O’Neill R, Krummel J, Gardner R, Sugihara G, Jackson B, DeAngelis D, Milne B, Turner M, Zygmunt B, Christensen S (1988) Indices of landscape pattern. Landscape Ecol 1:153–162
Ord J, Getis A (1995) Local spatial autocorrelation statistics: distributional issues and an application. Geogr Anal 27:286–306
Orth R, Carruthers T, Dennison W, Duarte C, Fourqurean J, Heck KL Jr, Hughes A, Kendrick G, Kenworthy W, Olyarnik S, Short F, Waycott M, Williams S (2006) A global crisis for seagrass ecosystems. Bioscience 56:987–996
Paul M, Lefebvre A, Manca E, Amos CL (2011) An acoustic method for the remote measurement of seagrass metrics. Estuar Coast Shelf S 93:68–79
Philibert M, Fortin M, Csillag F (2008) Spatial structure effects on the detection of patches boundaries using local operators. Environ Ecol Stat 15:447–467
Qi Y, Wu J (1996) Effects of changing spatial resolution on the results of landscape pattern analysis using spatial autocorrelation indices. Landscape Ecol 11:39–49
Robbins BD, Bell SS (1994) Seagrass landscapes: a terrestrial approach to the marine subtidal environment. Trends Ecol Evol 9:301–304
Sabol B, Melton RE Jr, Chamberlain R, Doering P, Haunert K (2002) Evaluation of a digital echo sounder system for detection of submersed aquatic vegetation. Estuar Coast 25:133–141
Sabol B, Kannenberg J, Skogerboe J (2009) Integrating acoustic mapping into operational aquatic plant management: a case study in Wisconsin. J Aquat Plant Manage 47:44–52
Shao G, Wu J (2008) On the accuracy of landscape pattern analysis using remote sensing data. Landscape Ecol 23:505–511
Simes R (1986) An improved Bonferroni procedure for multiple tests of significance. Biometrika 73:751–754
Sleeman J, Kendrick G, Boggs G, Hegge B (2005) Measuring fragmentation of seagrass landscapes: which indices are most appropriate for detecting change? Mar Freshw Res 56:851–864
Turner M, Gardner R, O’Neill R (2001) Landscape ecology in theory and practice: pattern and process. Springer, New York
Valley R, Drake M, Anderson C (2005) Evaluation of alternative interpolation techniques for the mapping of remotely-sensed submersed vegetation abundance. Aquat Bot 81:13–25
Wagner H, Fortin M (2005) Spatial analysis of landscapes: concepts and statistics. Ecology 86:1975–1987
Warren J, Peterson B (2007) Use of a 600-kHz acoustic Doppler current profiler to measure estuarine bottom type, relative abundance of submerged aquatic vegetation, and eelgrass canopy height. Estuar Coast Shelf S 72:53–62
Waycott M, Duarte C, Carruthers T, Orth R, Dennison W, Olyarnik S, Calladine A, Fourqurean J, Heck K, Hughes A, Kendrick G, Kenworthy W, Short F, Williams S (2009) Accelerating loss of seagrasses across the globe threatens coastal ecosystems. Proc Natl Acad Sci USA 106:12377–12381
Wedding L, Lepczyk C, Pittman S, Friedlander A, Jorgensen S (2011) Quantifying seascape structure: extending terrestrial spatial pattern metrics to the marine realm. Mar Ecol Prog Ser 427:219–232
Wiens J (1989) Spatial scaling in ecology. Funct Ecol 3:385–397
Wu J, Hobbs R (2002) Key issues and research priorities in landscape ecology: an idiosyncratic synthesis. Landscape Ecol 17:355–365
Wulder M, Boots B (1998) Local spatial autocorrelation characteristics of remotely sensed imagery assessed with the Getis statistic. Int J Remote Sens 19:2223–2231
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Barrell, J., Grant, J. Detecting hot and cold spots in a seagrass landscape using local indicators of spatial association. Landscape Ecol 28, 2005–2018 (2013). https://doi.org/10.1007/s10980-013-9937-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-013-9937-2