
Abstract
The expansion of roads, and the subsequent changes to the surrounding landscape not only lead to landscape fragmentation but also have been shown to be a key driver of biodiversity loss and ecosystem degradation. Local declines of species abundance as well as changes in animal behaviour have drawn attention to wider ecosystem effects including altered species composition and a degradation of ecosystem functioning. However, methods for measuring and quantifying the distribution and environmental impacts of roads are not yet fully developed. We present a new technique for assessing the potential impacts of roads on biodiversity using a spatial road disturbance index (SPROADI). The index is calculated from three sub-indices: traffic intensity as a measure of traffic volume per time and space; vicinity impact, which is the assessment of edge effect of roads on adjacent habitats (the road-effect zone); and fragmentation grade, which provides an indication of the degree to which the landscape is intersected by roads. SPROADI was then tested using data from the Federal State of Brandenburg in north-eastern Germany. A sensitivity analysis was carried out on the results to assess the robustness of the index. The findings revealed expected patterns of high road disturbance in urban and peri-urban landscapes surrounding Berlin. Less obvious were the high levels of road density and impacts in forest plantations across the southern region of Brandenburg, and low levels of road disturbance in agricultural crop lands of the north-western region. Results were variable for areas under some form of protection. The only national park displayed substantially lower SPROADI values in contrast to the surrounding non-protected areas whilst other protected area categories, which were landscape conservation areas and nature parks, revealed SPROADI values that were equally high as those for non-protected areas. The results of this study demonstrate the strengths and potential applications of SPROADI as a quantitative means for identifying low-traffic areas in the context of conservation and sustainable transport planning.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Landscapes have changed dramatically in the last 50 years as a result of a combination of factors including human population growth and rapid technological advancement. The rapid shift from natural ecosystems to cultural landscapes has introduced novel feedback processes with unexpected consequences (Ellis and Ramankutty 2008).
A main contributing factor to this transformation has been the sudden increase in the scale of human mobility helped by the development of transport infrastructure throughout the twentieth century. An increase in roads has enabled communities to rapidly expand into previously remote or inaccessible areas, thus ‘scaling up’ the level of human disturbance on ecosystems (e.g. Jaeger et al. 2007; Selva et al. 2011). The effects of roads on biodiversity are cumulative, time-lagged, complex and often irreversible (Selva et al. 2011). Landscape patterns and structures are altered by the effects of fragmentation, which can result in a predictable decrease in abundance and extent of nearby suitable habitats (e.g. Eigenbrod et al. 2009; Benitez-Lopez et al. 2010), as well as bringing about significant changes to local hydrological regimes and microclimatic conditions (Chen et al. 1993; Köhler et al. 2003). The effects of all this development on the ecology of populations, species and ecosystems has been widely studied (Trombulak and Frissell 2000; Forman et al. 2003; Fahrig and Rytwinski 2009; Taylor and Goldingay 2010). The outcomes of this research have revealed a wide range of threats including mortality due to collision with vehicles (van Langevelde et al. 2009), alternation in behaviour (e.g. Laurance and Stouffer 2004; Parris and Schneider 2009; Hoskin and Goosem 2010), restriction of gene flow within and between populations (Riley et al. 2006; Holderegger and Di Giulio 2010), changes in species composition (Watkins et al. 2003), and impairment in the resilience of populations and ecosystems to climate change (Jump and Peñuelas 2005). The colonization of previously undisturbed landscapes leads to a process of ‘contagion’ (Selva et al. in prep.), marked by an acceleration in the construction of roads and settlements. Inevitably, more opportunities to exploit natural resources arise bringing with it progressive disruption to the ecology of an area (Forman and Deblinger 2000; Trombulak and Frissell 2000; Forman et al. 2003; von der Lippe and von der Kowarik 2007). Changes to natural patterns of disturbance such as fire and pest infestation are just some of the problems to emerge from the growth of road networks (Nepstad et al. 2001; Takahata et al. 2010). Not all changes necessarily cause a down-turn in the status of biodiversity. Certain species may benefit from the increase in open grassland and dense scrub associated with road networks (Cousins 2006), although any perceived advantages are greatly outweighed by negative impacts. The main effects roads have on biodiversity and ecosystems can be summarized as follows: fragmentation caused by an increase in road density, which may also lead to habitat loss and barrier effects (e.g. Sanderson et al. 2002; Hawbaker and Radeloff 2004; Rico et al. 2007; Ewers and Didham 2007); an escalation in traffic volume, which effects biodiversity through noise, artificial lighting, pollution and other direct variables (e.g. Parris and Schneider 2009; Amusan et al. 2009); and the buffer effect caused by increases in traffic density, which impacts on biodiversity at larger landscape scales within the so-called “road-effect zone” (Forman and Deblinger 2000; UNEP 2001; Alkemade et al. 2009; Eigenbrod et al. 2009).
Historically, there has been a lack of scientific research on road ecology and only recently have there been attempts to study the ecological effects of roads at the landscape and ecosystem levels (Forman et al. 2003; Liu et al. 2008). There remains a significant knowledge gap regarding thresholds and larger scale effects of road-induced fragmentation on communities and ecosystems (van der Ree et al. 2011). The use of indices to measure landscape fragmentation is well documented and includes mathematical procedures such as those used to calculate the degree of landscape division, the splitting index, splitting density, the effective mesh size (see Jaeger 2000 for a review), or landscape connectivity indices (see Pascual-Hortal and Saura 2006 for a review). Girvetz et al. (2008) calculated fragmentation as the effective mesh size according to different fragmentation geometries. Opdam et al. (2003) introduced an index for landscape cohesion based on a number of measurements that included data on ecological profiles for multiple species at both habitat and landscape levels. All of these studies, have focused on the physical impacts roads have in fragmenting landscapes. Other aspects of road disturbance that relate to traffic volumes and high traffic densities are less well researched. Recent work on human population density, roads and urban infrastructure has been carried out to provide a global human footprint index (Sanderson et al. 2002). Other sources of data on road disturbance including the detailed statistics produced by the European Environmental Noise Directive are also available (EEA and ETC-SIA 2013). Much of the research has lacked important fine-grain analyses but also restricted its scope to the urban environment. Of the more recent studies carried out in road disturbance ecology the only landscape-level index that has included traffic disturbances using estimates of traffic volume and accessibility has been that developed by Theobald (2008). Although this index incorporates the most important elements of road disturbance it was designed to represent human use and accessibility rather than provide a means for assessing disturbances. To capture a more detailed picture of the interactions between biodiversity and road infrastructure it is necessary to take into account the combined effects of traffic volumes, road density and distribution, and also to consider the zone in which these factors exert their effects.
Evidence for deep and long-lasting effects of road disturbance on biodiversity has raised awareness of the importance of prioritising and protecting landscapes with few or no roads, namely, ‘road-less’ or ‘low-traffic areas’ (Selva et al. 2011). Such areas represent undisturbed and functioning ecosystems, and have been claimed to be crucial for the conservation of biodiversity and ecosystem services. Road-free areas are particularly relevant to ambitious large-scale strategies for improving the adaptation of landscapes to climate change (Strittholt and Dellasala 2001; Crist et al. 2005; Selva et al. 2011). Despite the decline in recent years of road-less areas there has been little attempt in conservation and transport planning to protect these landscapes. The European landscape is severely affected by road development and yet there is still no policy framework in place to identify and preserve the few remaining road-less and low-traffic areas (Selva et al. 2011). Across the rest of the world there are a few countries (e.g. United States of America), which include in their conservation planning and legislation road-related criteria (Selva et al. 2011). There remain significant gaps in our understanding of the larger-scale effects of road-induced fragmentation on communities and ecosystems (van der Ree et al. 2011). This absence of knowledge has been accompanied by a lack of quantitative tools in management practice to characterize the spatial patterns and potential effects of roads at the landscape level.
The main aim of this paper is to offer an index that integrates the multiple effects of roads, from landscape fragmentation to road-induced disturbance. The spatial road disturbance index (SPROADI) provides a spatially explicit, landscape-scale measure of road disturbance that can be readily interpreted by practitioners working in the field of conservation and sustainable land use management. The assumption underlying this study is that the cumulative impact of roads on biodiversity is attributable to the combined effects of three main factors: (1) determinants of traffic intensity which can be summarized primarily by the length of road(s) within a landscape parcel and the intensity of traffic use on that stretch of road or road network; (2) the density and distribution of roads in a given landscape that also provides an indication of the vicinity (proximity) of roads to natural or semi-natural habitats; and (3) the overall degree of landscape fragmentation due to roads. SPROADI attempts to provide quantifiable values for traffic disturbance based on an aggregated index, which includes three measures: traffic intensity (T); vicinity impact (V); and fragmentation grade (F). Traffic intensity (T) describes the traffic volume for different roads recorded within a specified landscape unit. The vicinity impact (V) represents the disturbance generated from the presence and usage of roads in adjoining areas. Fragmentation grade (F) defines the impact of roads at a landscape level and is measured as the number and size of sub-polygons created by roads dissecting the landscape. To demonstrate how the index can be applied on the ground, we use data on traffic for the German Federal State of Brandenburg. The results of the analysis are presented as three sub-indices for traffic intensity, vicinity impact and fragmentation grade, followed by the combined results of all three factors into an aggregated index referred to as “SPROADI”. A set of maps is produced, including a generalized map that represents regions of high and low road impact, and corresponding high and low conservation potential. A statistical sensitivity analysis using different weighting and a jackknifing process is applied to the three sub-indices to test for consistency and robustness. A final gap analysis was performed on the derived data set using SPROADI to demonstrate, using spatial representation, the full extent of road disturbance on different protected area categories and specific ecosystems. Finally, recommendations for the application of SPROADI in a broader framework of evaluating landscapes for conservation design and planning are presented in the discussion.
Materials and methods
Index development
SPROADI can be calculated as a weighted additive linear index with an equal weighting given to all three sub-indices traffic intensity (T), vicinity impact (V) and fragmentation grade (F). Although an additive index does not account for non-linear properties (e.g. threshold effects of traffic density or fragmentation), it does consider the complementary effects of the underlying indicators (in this case the three combined sub-indices T, V and F). It achieves this by awarding the highest rank to those areas with the greatest values for all three measures. SPROADI values, together with all three sub-indices, were calculated for display as grid-based maps. The use of raster formatting in the cartographic output allowed for the standardization and statistical analysis of the data. Whilst many ecological studies and landscape analyses use land-use maps that are grid-based, roads tend to disappear when the cell size is too large (Hawbaker and Radeloff 2004). Raster-based maps designed to incorporate information on roads and traffic can be directly fed into ecological studies that analyse data on a raster basis and at an appropriate resolution. However, it should be noted that in many cases such maps often have to be carefully prepared at the appropriate resolution as they are not available a priori.
Traffic intensity (T) was expressed as the number of vehicles per hour (TV) (Table 1) multiplied by road length (R), and summed up for all road sections in a given cell as:
where T k is the traffic intensity of a grid k; R k,i , length of a road section i in a grid cell k (km); TV k,i , average number of vehicles per hour (traffic volume) on road section i in a grid cell k; i = {1,2,3,…,n k }, index variable for road sections occurring in a cell k; n k , number of road sections in a grid cell k.
The vicinity impact (V) for a given cell represented the cumulative effect of all relevant roads as a function of their distance and traffic load. With certain map resolutions, and depending on the nature of the specific research question and the ecosystem, the vicinity impact can be calculated using the attributes of the eight neighbouring cells (Eq. 2), although for the corner and boundary areas the number of cells included in the calculation had to be reduced. For this study, a 1 km resolution was adopted as an appropriate scale.
The effects of roads may extend far beyond this scale of analysis but evidence from studies carried out on road effect zones indicate that a 1 km resolution is an appropriate scale to capture most of the relevant impacts of roads on biodiversity (Forman and Deblinger 2000; UNEP 2001; Alkemade et al. 2009). For example, the road effect zone of a highway for different anuran species is generally <1 km (Eigenbrod et al. 2009). where V k is the vicinity impact on grid k; T k,v , traffic intensity in an adjacent (v) grid cell k; v = {1, 2, 3,…,n k }, index variable for surrounding cells; n k , number of surrounding cells of grid cell k.
Fragmentation grade (F) was estimated using a equation to calculate the effective mesh density (EEA 2011), according to the CBC method as described in the study by Moser et al. (2007). The effective mesh density is the reciprocal value of effective mesh size (EEA 2011). In this approach the assumption is made that within a given reporting unit the size of polygons without roads can serve as a good indicator for the level of road disturbance, with larger polygons indicating less disturbed areas. However, the procedure used for the raster formatting introduces a certain degree of error into the analysis by cutting the area of polygons. A correction can be made by taking into account the “boundary problem” and by factoring in the total area of each polygon beyond the boundaries of the raster cells as described in Moser et al. (2007). This approach also reduces the sensitivity of the calculation to changes in the resolution of the map. The equation for retrieving the cross boundary connection (CBC) values is given in Eq. 3 (Moser et al. 2007). Calculating the reciprocal value of the effective mesh size then returns the corresponding CBC value of the effective mesh density (Eq. 4).
\( m_{eff}^{CBC} \), effective mesh size of a grid cell; F k , fragmentation grade of a grid cell k; j = {1, 2, 3, …, n k }, index variable for number of polygons; n k , number of polygons without roads belonging to a grid cell k; A k , area size of a grid cell k (m²); A j,k , area size of the fraction of a polygon j lying within a grid cell k (m²); \( A_{j,k}^{compl} \), area size of the complete polygon j that A j,k is part of (m²); \( A_{total}^{compl} \); total area size of all complete polygons intersecting a grid cell k (m²).
The combined effects of all three sub-indices, traffic intensity (T), vicinity impact (V) and fragmentation grade (F) were taken to represent the value of the SPROADI.
Calculations for all three sub-indices were normalized with the min–max-normalization procedure, using a scale range between 0 and 100 (see Eq. 5).
I k,norm = {T k,norm , V k,norm , F k,norm }, set of normalized sub-indices {T, V, F} within a grid cell k; I k = {T k , V k , F k }, set of sub-indices {T, V, F} within a grid cell k; I min = {T min , V min , F min }, minimum values of sub-indices across all grid cells of the study area; I max = {T min , V min , F min }, maximum values of sub-indices across all grid cells of the study area.
The final SPROADI was then calculated as the weighted sum of the three equally weighted sub-indices (Eq. 6).
SPROADI k = spatial road disturbance index of a grid cell k; n = number of sub-indices (in this case: 3); w i = {w T , w V , w F } where w stands for the assigned weight for each of the sub-indices. In this study we assigned equal weights to each, i.e. w i = 0.33, so that \( \sum\nolimits_{i} {w_{i} = 1} \) and 0 ≤ wi ≤ 1.
Application of the index to the case study region, the state of Brandenburg
SPROADI was applied to the data on traffic for the Federal State of Brandenburg. Raster files were created from an initial template raster that was generated for the entire state at a resolution of 1 km². Brandenburg covers 29,479 km² of the north-eastern part of Germany, bordering Poland. The human population density of Brandenburg is relatively low with an average of 85 inhabitants per km² compared to the national average of 229 inhabitants per km². The landscape in this region is characteristically dominated by a patchwork of forest, plantations and mixed agriculture with relatively small scale urban development. Despite its rural character there is a well-developed network of roads including several major highways linking Berlin to other large urban hubs. The city of Berlin, which is a federal state in its own right, was excluded from the study (Fig. 1). It was felt that the urban landscape of Berlin would distort the results generated for the larger surrounding rural landscape.

Overview map of the case study area, the Federal State of Brandenburg, Germany, including district borders, motorways and main roads based on data from the office of land-surveying and geo-information Brandenburg (LBG 2008) and from the Federal Agency for Cartography and Geodesy (Bundesamt für Kartographie und Geodäsie (BKG) 2006)
The classification system used to represent the distribution of traffic (measured as vehicles per hour), and to calculate traffic intensity (T) and vicinity impact (V), contained 12 different categories based on data originally produced for geo-marketing purposes (Table 1) (DDS Digital Data Services GmbH 2010a, b). These data were extrapolated from empirical measurements generated for the frequency counts of vehicles recorded during traffic surveys. A frequency value for the use of roads was calculated by dividing the number of passing persons in cars (provided by DDS) by the value, 1.16 (the mean value of passengers per car, DDS Digital Data Services GmbH 2010a). Using this information, we estimated the average number of vehicles for each hour accessing all stretches of roads within a cell. Forest roads were included in the study as they occurred in high density and it was felt that they may contribute significantly to forest fragmentation as well as exert edge effects on the surrounding environments (van Langevelde et al. 2009). Although there are no records in the DDS data set on traffic frequency for forest roads, information for these particular road networks was generated by using data from the Office of land-surveying and geo-information Brandenburg (LBG 2008). A value for the amount of traffic on forest roads was set at 0–0.2 vehicles per hour (category of 0). Any value much above this would have been misleading as forest roads in Brandenburg are officially closed to the public and are permitted access only to foresters and licensed hunters. However, the absence of any physical barrier encourages a steady but infrequent use of forest roads by members of the public. Data for field roads were not available.
In the calculation for vicinity impact (V) all adjacent cells within the range of 1 km were considered, which equates to one cell in each direction. As Brandenburg has a relatively high density of roads, especially in those areas surrounding Berlin, only the ten largest polygons per cell were considered in the calculation for fragmentation grade (F). Initial tests indicated that any consideration of more polygons would have had no impact on the value of F when rounding values down to three decimal places. For those grid cells at the boundary of the study area, the complete area size of polygons beyond grid cell borders \( A_{j,k}^{compl} \) could not be estimated as data were not available for neighbouring federal states (Mecklenburg-West Pomerania, Saxony, Lower Saxony, Saxony-Anhalt, and Berlin), or Poland. This problem did not really present itself for the eastern border of Brandenburg as the Odra river, separating Germany from Poland, has a similar effect to roads in that it restricts the movement of some species. At least for some polygons bordering Lower-Saxony and Saxony Anhalt in the west, the presence of the River Elbe had a similar effect. Other rivers or water bodies were not considered as fragmenting elements.
For each pixel on the map a SPROADI value was recalculated to give an average reading using the results for the eight neighbouring cells, and this way a “generalized density” measure was produced for SPROADI (with fewer cells recorded for corner or border cells). This ‘generalization process’ was repeated three times, in order to generate a ‘smoothing effect’ during the iterative process of aggregating spatial information. Using this calculation an average value for each cell is generated given the data from a number of cells within a larger radius, and leading to the effect that the influence of each cell on the calculated average value of a given area is relative to its distance.
All of the spatial analysis and calculations for the various indices were carried out using Arc GIS 9.3.1 software (ESRI 2008) together with INSENSA GIS software (Biber and Freudenberger 2011).
Sensitivity analysis
A sensitivity analysis was performed on the Brandenburg data to assess the uncertainties underlying the index caused by the selection and weighting of sub-indices. This approach adopts similar techniques to those used in studies by Saisana and Srebotnjak (2006) and Saisana and Saltelli (2010), in which baseline outcomes are compared with different modifications to its calculations. In our study the data was subjected to ‘jackknifing’, an iterative process of removing each sub-index in turn before re-running the analysis. In the following stages of the analysis the relative weights for each sub-index were altered, first randomly and then systematically. Random weight variation applies a process of simultaneous random alteration to the weights for all sub-indices. Conversely, systematic weight variation changes the weights for one sub-index for a defined step size and then increases or decreases the weights equally for the other indicators. For instance, the weight of F can be decreased by 10 % whilst weights for V and T are increased by 5 %. This way, it was possible to generate 47 modifications to the SPROADI index (Table 2).
Based on these modifications, the coefficient of variation was calculated for each pixel. Volatility measures were also generated to assess for consistency between the different weighting schemes and the indicator selection in order to identify those areas that received consistently low values for SPROADI. Calculating volatility involves recording the frequency of index values that selects a value below or above a specified threshold for all index variations. In this study, the volatility measures for all the cells were assessed by estimating the frequency values for low readings, defined as measures of 10 % or less of the maximum value (with different maxima within each index variation). In the final stage of the analysis spearman rank correlation coefficients were applied to the data to assess the relation between SPROADI, its sub-indices and the generalized density version of SPROADI. Additional correlations were carried out on different raster datasets that represented the robustness of each grid cell to any variation in index weighting, and to the effects of applying ‘jackknifing’ to sub-indices values. We also plotted these outcomes as maps to identify potential spatial patterns of uncertainty compared to the spatial pattern provided by SPROADI and its components.
Land-cover and protection gap analysis
CORINE land-cover data (Umweltbundesamt 2009), together with information on protected areas (BfN 2008, 2009), were used to analyse the distribution of SPROADI values between different land-cover types and between non-protected areas and areas under different categories of protection. Raster maps were created with a resolution of 1 km, and the most prominent land-cover type and designation status for protected areas was assigned to each cell. This resulted in the dismissal of several small-scale attributes including small patches of both land-cover types and conservation areas. Only the most dominant land-cover types in Brandenburg were considered in the analysis, namely coniferous forest, mixed forest, broad-leaved forest, non-irrigated arable land, pastures, natural grasslands, discontinuous urban fabric and urban fabric. Values for pastures and natural grasslands were combined as were those for discontinuous urban fabric and urban fabric. Protected area categories included nature conservation areas and national parks (providing the strictest protection), landscape conservation areas and nature parks (with hardly any restrictions to agriculture and forestry), biosphere reserves and Natura 2000 sites including designated special areas of conservation (SACs) and special protection areas (SPAs).
Data for protected areas were used to conduct a gap analysis and to assess for possible relationships between these areas and different land-cover types. The extent of overlap between protected areas and landscapes with little road infrastructure and comparatively low traffic disturbance was also assessed. The results generated were then statistically analysed using a Kruskal–Wallis-Anova to compare SPROADI values between the different land-cover classes, and Mann–Whitney-U tests to determine whether there were significant differences between protected and non-protected areas. In the analysis it was possible to assess for the capability of SPROADI to identify road-less areas in an ecologically relevant context (land-use type), and also to identify gaps in protected area designation conservation gaps and hence policy-relevant needs.
Results
Maps representing the calculated values of traffic intensity (T), vicinity impact (V), fragmentation grade (F) and SPROADI are displayed in Fig. 2.

a Traffic intensity (T), b vicinity impact (V), c fragmentation grade (F) and d the combination of the three sub-indices into the spatial road disturbance index (SPROADI); high values in red represent high road disturbance, low values in blue represent low road disturbance along the different sub-indices or the overall SPROADI outcome
The values calculated for traffic intensity (Fig. 2a) indicated that there was a visual matching and a significant positive correlation between readings for traffic intensity and vicinity impact (r = 0.605, p < 0.001) (Fig. 2b; Table 3). The map generated for fragmentation grade produced a rather different spatial pattern compared to the other two indices (Fig. 2c). High levels of landscape fragmentation across the State of Brandenburg were recorded in areas where readings for both traffic intensity and vicinity impact were low. That said, a significant positive relationship was recorded for traffic intensity and fragmentation grade (r = 0.135, p < 0.001), and again for vicinity impact and fragmentation grade (r = 0.139; p < 0.001). As SPROADI is calculated as the sum of all three sub-indices it demonstrates spatial matches to all three but most noticeably with traffic intensity (r = 0.714; p < 0.001) and vicinity impact (r = 0.703; p < 0.001) (Table 3; Fig. 4a–c).
When SPROADI was applied to data for roads and traffic in Brandenburg it returned values within a range between 0 and 83.667. The highest readings were for both the peri-urban landscape and an outer ‘halo’ zone surrounding Berlin. In addition, there were a number of regions across southern parts of Brandenburg that also appeared to register high SPROADI values (Fig. 2d). By contrast, low values were obtained for broadly-defined agricultural regions in the north-western and north-eastern parts of the study area, specifically, Havelland and Prignitz in the west and Uckermark in the east.
The findings of a sensitivity analysis carried out on the data indicated that the coefficient of variation values were significantly higher in areas with low SPROADI values (r = −0.273, p < 0.001) (Figs. 3a, 4d). This suggests that low SPROADI values are more sensitive to index variations than areas of high SPROADI values. On testing for a correlation between volatility of low index values (<10 % of maximum value, Fig. 3b) and SPROADI, a significant negative reading was returned (r = −0.939, p < 0.001, Table 3). All three sub-indices showed similar strong correlations when tested independently against measures for volatility (vicinity impact r = −0.676; traffic intensity r = −0.660, p < 0.001; and fragmentation grade r = −0.611, p < 0.001). These results indicate that the sub-index for traffic intensity may be the most dominant component and best single predictor of SPROADI but the readings generated for vicinity impact are the most effective predictor for volatility in the case of low SPROADI values.

a coefficients of variation, b volatility of low SPROADI sites (from 0 to 10 % of the maximum value), c generalized density raster of SPROADI and d bivariate maps displaying protection status and areas with low and high road disturbance index (SPROADI) values. All maps are displayed using quantile breaks for classification

Scatter plots of the relation between spatial road disturbance index (SPROADI) and its sub-indices a traffic intensity (T), b vicinity impact (V), c fragmentation grade (F) as well as its sensitivity measures, d coefficient of variation, e SPROADI versus the generalized version of SPROADI and f the generalized SPROADI version versus the coefficient of variation
A reformatted generalized map (Fig. 3c) representing the effects on a landscape of densely spaced roads revealed clusters of high SPROADI values for those landscapes surrounding Berlin; regions in the southern part of the state; and some northern and central parts of Brandenburg. A significant positive correlation was recorded between the generalized density version of SPROADI and the original SPROADI values (r = 0.788; p < 0.001), and a significant negative correlation was recorded between the generalized SPROADI readings and coefficients of variation (r = −0.072, p < 0.001; Table 3; Fig. 4e, f).
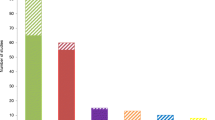
Each of the land-cover types across the state produced significantly different SPROADI readings (Kruskal–Wallis-Anova with Bonferroni correction, Hc = 4,437; p < 0.001). The highest mean values were obtained for urban areas, followed by coniferous plantations and mixed forests (Fig. 5a). By contrast, those landscapes classified as pasture and grassland, non-irrigated arable land and broad-leaved forest appeared to have the lowest mean values for the index. A pair-wise comparison between the different land-cover types returned significant results (p < 0.001), although medians differed only slightly (Fig. 5a). No significant difference was found when comparing arable landscape and broadleaved forest (Bonferroni corrected p = 0.054). A similar result occurred when comparing coniferous forests with mixed forest landscapes (Bonferroni corrected p = 0.112).

Boxplots showing the distribution of values of the spatial road disturbance index (SPROADI) from Brandenburg for a different land-cover classes according to grouped land-cover data and b protected and non-protected areas and categories of protected areas separately
Protected area coverage was analysed for areas with high or low SPROADI values (above and below the median, using quantile breaks). Protected areas with high SPROADI values were located in the north (Oberhavel and Barnim) and also across the southern part of the state, for example in parts of Potsdam-Mittelmark and Dahme-Spreewald counties (Fig. 3c). Unprotected landscape with low SPROADI values was located in the north (Prignitz and Uckermark) and east (Märkisch-Oderland), as well in a few areas in the south of the state, bordering Saxony and Saxony-Anhalt (Fig. 3d).
Road disturbance appeared to be significantly lower in protected areas compared to the surrounding landscape (U = 1.03E08; p < 0.001). Despite the significant outcome, median differences were relatively small (Fig. 5b). Of all the protected areas in Brandenburg, the lower Odra Valley National Park (the only national park in Brandenburg) recorded the lowest average values for traffic and road disturbance. This region also had substantially lower SPROADI values compared to the surrounding unprotected landscape (U = 6.28E5; p < 0.001).
Nature parks were singled out from the other protected area categories for revealing no significant difference in readings for SPROADI from the surrounding landscape (U = 4.99E7; p = 0.036). Whilst all other protected areas appeared to have noticeably lower traffic disturbance than the rest of the landscape the recorded median values were only moderately lower in some of the protected area categories, for instance in landscape conservation areas (Fig. 5b).
Of all the landscape typologies across the state that returned low SPROADI values 54 % were designated as protected land but a similar proportion of cells representing protected areas was also found in areas with high SPROADI readings (51 %) (Table 4). Similar results were obtained for coniferous and mixed forests where both protected and non-protected areas occurred in equal proportions in both high and low SPROADI areas. The findings were not straight forward for forests as the results for broad-leaved forest sites indicated. In this particular landscape there appeared to be a slightly higher percentage of protected areas within low SPROADI sites.
The findings for this study suggest that with the exception of broadleaved areas there was very little difference in road development between much of the protected landscape and the surrounding unprotected countryside. It also highlighted the extent of traffic disturbance in those areas of coniferous and mixed forests protected by legislation. Much of the unprotected non-irrigated arable land appeared to be least affected by fragmentation and traffic disturbance.
Discussion
Several indices and methods have been developed to quantify the influence of road and traffic disturbance on biodiversity (e.g. Jaeger 2000; Pascual-Hortal and Saura 2006; Girvetz et al. 2008). Most of the current models in use focus on fragmentation and the physical presence of roads without much consideration given to other factors relating to traffic density or the road-effect zone. SPROADI is an approach that combines several measures of road disturbance including fragmentation and traffic densities, and the potential cumulative impacts on neighbouring areas.
The results produced for the Federal State of Brandenburg revealed several distinctive and unexpected patterns. One of the more noteworthy findings was the unusually high level of road disturbance recorded in the forested landscape, more specifically, in the conifer plantations. An obvious explanation for this pattern is the roads reflect the extent of commercial activity going on in the forests and the need to provide access for logging and extraction. In sharp contrast, the other main commercial use of land, namely agriculture, had one of the lowest levels of road activity in the region. Unlike the farmed landscape most forested areas across Germany are protected and yet the extensive road network in wooded areas is very likely to have a negative impact on the ecosystem by allowing the colonisation of non-native species (Wilkie et al. 2000; Joly et al. 2011). There are other concerns relating to the effects of roads on ecological processes and dynamics. For instance, a high density of roads may increase the susceptibility of the forest to extreme weather conditions, bark beetle attacks or other phenomena affiliated with climate change (Malhi et al. 2009).
An unexpected outcome of the study was the high SPROADI readings recorded for a number of the designated conservation sites. A possible answer for this anomaly is the historical land use of the region. German landscapes like nearly all other European rural areas is deeply relictual. There are almost no vestiges of wilderness remaining in any part of modern Europe. Land management went through periods of intensive use interspersed by neglect or abandonment. In a number of cases the neglect of agricultural or forested lands provided opportunities for protective conservation although many of these sites retained historical legacies of previous human activity including roads.
The results raise a number of questions about the effectiveness of SPROADI if used in isolation to determine the conservation priority of targeted sites. The model is most effective when applied in combination with other conservation prioritization tools. The outcomes of the sensitivity analysis indicated that higher SPROADI values were more robust to index variation than lower ones (Fig. 4d), suggesting that higher levels of uncertainty were associated with lower SPROADI values. This should persuade scientists to avoid using SPROADI as a sole measure for prioritising areas for protection.
The multivariate capabilities of SPROADI make it possible to carry out a detailed analysis of the impacts of roads in a varied landscape. It also provides a useful approach for assessing the ecological status of landscapes and for designing a spatial conservation strategy.
For instance, conservation managers could use SPROADI to identify landscapes with low traffic disturbance, and also target existing protected sites for restoration work that have unacceptable levels of traffic use. The linked sub-indices in SPROADI allow for a richer interpretation of road disturbance that is not always provided in more conventional linear models that work with single measures.
Limitations of SPROADI
The effectiveness and accuracy of SPROADI could be improved by developing the calculation procedure. The normalization of the sub-indices prior to the calculation does not allow for comparisons between different study areas as their assigned values are transformed to give a standard measure within a range between 100 and 0. However, at this point, the normalization is necessary to ensure that the calculation of the weighted index is free from any bias that may arise when the data is subjected to variability in the ranges of the sub-indices. Another source of potential error is related to scale and resolution. Whilst all sub-indices are independent of the spatial resolution, the methods used to calculate the vicinity impact across different resolutions may differ. For instance, if a fine resolution map is applied then it may be necessary to generalize values for a larger number of cells. Conversely, if using a coarser resolution map, a process of ‘up-scaling’ is required to avoid the loss of relevant smaller-scale information.
Apart from the aspects of disturbance that are covered by the three chosen sub-indices, a range of physical attributes, including the width and composition of roads, ground impaction, vehicle speed and type (cars, trucks etc.), could also be included in the overall analysis, although it is accepted that some of these factors are likely to correlate against each other. Another potential opportunity for improvement is to include light pollution as one of the factors in the index, particularly as a significant proportion of animal species are nocturnal (Rodrigues et al. 2012). Further analyses could include data on seasonal changes in SPROADI (traffic frequencies), provided detailed data are available to determine the influence of conflicts arising from seasonal changes in animal movements.
The complex nature of landscape disturbances presents difficulties when interpreting the cause and effect patterns of road and traffic impacts. Future research is needed to address a wider range of factors including long-term effects and threshold values relating to roads and traffic and their impact on the health of ecosystem. The linear additive character of SPROADI does not consider potential non-linear relationships between road- and traffic disturbance and its effects on biodiversity. However, it can account for cumulative effects of road disturbance by incorporating different measurements in the form of sub-indices. Although the three sub-indices are strongly correlated with SPROADI, this does not rule out the importance of each single factor as a driver of change in species′ composition and biodiversity.
Applications and outlook
In this study a number of protected areas were observed to have levels of road-induced disturbance that were similar to measures recorded in the surrounding landscape. The unexpected high SPROADI readings for a number of protected areas can be explained by the lack of consideration of road infrastructure when selecting and prioritising protected areas, as already identified by Selva et al. (2011). Specifically in Germany, the results of this study indicate there is a need to strengthen the designation process of roadless areas for protected areas. Although the German protected area categories are designed for different conservation purposes they are not selected using criteria from a systematic top-down conservation planning procedure. Only protected areas under the EU Natura 2000 regime are selected using criteria to represent the distribution status of priority species and habitats. National policy on undisturbed areas within conservation areas and national parks adopts principles more in line with wilderness protection (BMU 2007). On the other hand, biosphere reserves, nature parks and landscape conservation areas employ a strategy, which seeks to promote a sustainable coexistence of humans and nature, a strategy which seems to favour accessibility for humans over wilderness or road-less areas. The conservation of modified cultural landscapes is included in this category (BNatSchG 2010 sect. 25–27; Kunze et al. 2013).
With its focus on traffic disturbance, SPROADI can be applied to the wider open landscape in the assessment of ecosystem degradation, and in the prioritization of sites for conservation. Scientists may also find use for the index in future research on species distribution modelling or as part of a proactive conservation planning strategy. For example it can be used to predict landscape permeability for species that are susceptible to multiple effects of traffic and roads (Spear et al. 2010). Equally, it can be applied in the analysis of the effects of habitat edges on species distribution (Zurita et al. 2012). SPROADI can be adapted to consider land-use changes and spatiotemporal variability in the landscape by applying different weighting schemes, adjusting the radius used to calculate vicinity impact, or other modifications based on the purpose and scale of analysis. In any assessment of landscape fragmentation particular attention should be given to the influence of natural barriers such as mountain ridges or rivers.
SPROADI provides an effective means of monitoring general landscape patterns under conditions of change across space and time. In this regard it could also improve the assessment of protected areas for ecosystem services using current or simulated scenarios for land-use changes, thus providing a more robust framework for proactive management. That said, caution should be applied when using the index in a wider global context as the information data base on road infrastructure remains patchy and incomplete in a number of remote or less developed regions. There is an urgent need to improve access to high quality, standardised global data on traffic volumes and other environmental factors. While global data on the distribution of (major) roads is readily available many of the minor roads may be absent. Parameters related to human activity and mobility such as population density, economic development or presence of urban settlements, should be explored as they can be used as proxies for estimating traffic volumes.
SPROADI provides a strong proxy measure for the impacts of roads on landscapes and biodiversity and can make a valuable contribution to conservation planning. In particular, the application of SPROADI could prove valuable in the design and implementation of Green Infrastructure (compare corresponding EU strategy; European Commission 2010).
References
Alkemade R, Oorschot M, Miles L, Nellemann C, Bakkenes M, ten Brink B (2009) GLOBIO3: a framework to investigate options for reducing global terrestrial biodiversity loss. Ecosystems 12(3):374–390
Amusan A, Bada, ASB, Salami, AT (2009) Effect of traffic density on heavy metal content of soil and vegetation along roadsides in Osun state, Nigeria. W Afr J Appl Ecol 4(1):107–114
Benitez-Lopez A, Alkemade R, Verweij PA (2010) The impacts of roads and other infrastructure on mammal and bird populations: a meta-analysis. Biol Conserv 143(6):1307–1316
BfN (2008) Natura 2000—Sachdaten. Bundesamt für Naturschutz
BfN (2009) Schutzgebietskataster. Bundesamt für Naturschutz
Biber D, Freudenberger L (2011) INSENSA-GIS: an open-source software tool for GIS index development and sensitivity analysis. www.insensa.org. Accessed 28 Sept 2012
BMU (2007) Nationale Strategie zur Biologischen Vielfalt. Bundesministerium für Umwelt, Naturschutz und Reaktorsicherheit
BNatSchG (2010) Gesetz über Naturschutz und Landschaftspflege—Bundesnaturschutzgesetz, i.d.F. vom 1.3.2010
Bundesamt für Kartographie und Geodäsie (BKG) (2006) ATKIS DLM 250
Chen J, Franklin JF, Spies TA (1993) Contrasting microclimates among clearcut edge, and interior of old-growth Douglas-fir forest. Agric For Meterol 63:219–237
Cousins SA (2006) Plant species richness in midfield islets and road verges—the effect of landscape fragmentation. Biol Conserv 127(4):500–509
Crist MR, Wilmer B, Aplet GH (2005) Assessing the value of roadless areas in a conservation reserve strategy: biodiversity and landscape connectivity in the northern Rockies. J Appl Ecol 42(1):181–191
DDS Digital Data Services GmbH (2010a) Digital Data Streets Brandenburg: Spezifikation GIS, DDS Digital Data Services GmbH, Stumpfstr. 1, 76131 Karlsruhe, Germany
DDS Digital Data Services GmbH (2010b) FAW-FREQUENZATLAS Brandenburg
EEA (2011) Landscape fragmentation in Europe; joint EEA-FOEN report. EEA report
EEA and ETC–SIA (2013) NOISE, Noise Observation and Information Service for Europe maintained by the European Environment Agency (EEA) and the European Topic Centre on Spatial Information and Analysis (ETC-SIA, previously ETC-LUSI) on behalf of the European Commission in accordance with the European Directive 2002/49/EC http://noise.eionet.europa.eu. Accessed 22 March 2013
Eigenbrod F, Hecnar SJ, Fahrig L (2009) Quantifying the road-effect zone: threshold effects of a motorway on anuran populations in Ontario. Can Ecol Soc 14(1):24
Ellis EC, Ramankutty N (2008) Putting people in the map: anthropogenic biomes of the world. Front Ecol Environ 6(8):439–447
ESRI (2008) Arc GIS, Version 9.3.1 Environmental Systems Research Institute
European Commission (2010) Green infrastructure. Publications Office, Luxembourg
Ewers RM, Didham RK (2007) The effect of fragment shape and species’ sensitivity to habitat edges on animal population size. Conserv Biol 21(4):926–936
Fahrig L, Rytwinski T (2009) Effects of roads on animal abundance: an empirical review and synthesis. Ecol Soc 14(1):21
Forman RTT, Deblinger RD (2000) The ecological road-effect zone of a Massachusetts (USA) suburban highway. Conserv Biol 14(1):36–46
Forman RTT, Sperling D, Bissonette JA, Clevenger AP, Cutshall CD, Dale VH, Fahrig L, France R, Goldman CR, Heanue K, Jones J, Swanson F, Turrentine T, Winter TC (2003) Road ecology: science and solutions. Island Press, Washington, DC
Girvetz EH, Thorne JH, Berry AM, Jaeger JAG (2008) Integration of landscape fragmentation analysis into regional planning: a statewide multi-scale case study for California, USA. Landscape Urban Plan 86:205–218
Hawbaker TJ, Radeloff VC (2004) Roads and landscape pattern in northern Wisconsin based on a comparison of four road data sources. Conserv Biol 18(5):1233–1244
Holderegger R, Di Giulio M (2010) The genetic effects of roads: a review of empirical evidence. Basic Appl Ecol 11(6):522–531
Hoskin CJ, Goosem MW (2010) Road impacts on abundance, call traits, and body size of rainforest frogs in northeast Australia. Ecol Soc 15(3):15
Jaeger JAG (2000) Landscape division, splitting index, and effective mesh size: new measures of landscape fragmentation. Landscape Ecol 15(2):115–130
Jaeger JAG, Raumer HS, Esswein H, Mueller M, Schmidt-Luettman M (2007) Time series of landscape fragmentation caused by transportation infrastructure and urban development: a case study from Baden-Wurttemberg, Germany. Ecol Soc 12(1):22
Joly M, Pascale B, Gbangou RY, White MC, Dubé J, Lavoie C (2011) Paving the way for invasive species: road type and the spread of common rageweed (Ambrosia artemisiifolia). Environ Manage 48:514–522
Jump AS, Peñuelas J (2005) Running to stand still: adaptation and the response of plants to rapid climate change. Ecol Lett 8(9):1010–1020
Köhler P, Chave J, Riera B, Huth A (2003) Simulating the long-term response of tropical wet forests to fragmentation. Ecosystems 6(2):114–128
Kunze B, Kreft S, Ibisch PL (2013) Naturschutz im Klimawandel: Risiken und generische Handlungsoptionen für einen integrativen Naturschutz. In: Vohland K, Badeck F, Böhning-Gaese K, Ellwanger G, Hanspach J, Ibisch PL, Klotz S, Kreft S, Kühn I, Schröder E, Trautmann S, Cramer W (eds) Schutzgebiete Deutschlands im Klimawandel—Risiken und Handlungsoptionen. Naturschutz und Biologische Vielfalt. Bundesamt für Naturschutz (BfN), Bonn
Laurance SGW, Stouffer PC (2004) Effects of road clearings on movement patterns of understory rainforest birds in central Amazonia. Conserv Biol 18(4):1099–1109
LBG (2008) Basis-DLM, ATKIS: Verkehr: Strasse, Weg, Strassenkörper, Fahrbahn, Rollbahn. Landesvermessung und Geobasisinformation Brandenburg (LBG), Potsdam
Liu SL, Cui BS, Dong SK, Yang ZF, Yang M, Holt K (2008) Evaluating the influence of road networks on landscape and regional ecological risk—a case study in Lancang River Valley of Southwest China. Ecol Eng 34(2):91–99
Malhi Y, Aragão LEOC, Galbraith D, Huntingford C, Fisher R, Zelazowski P, Sitch S, McSweeney C, Meir P (2009) Exploring the likelihood and mechanism of a climate-change-induced dieback of the Amazon rainforest. P Natl Acad Sci USA 106(49):20610–20615
Moser B, Jaeger JAG, Tappeiner U, Tasser E, Eiselt B (2007) Modification of the effective mesh size for measuring landscape fragmentation to solve the boundary problem. Landscape Ecol 22:44–459
Nepstad D, Carvalho G, Barros AC, Alencar A, Capobianco JP, Bishop J, Moutinho P, Lefebvre P, Silva UL, Prins E (2001) Road paving, fire regime feedbacks, and the future of Amazon forests. For Ecol Manage 154(3):395–407
Opdam P, Verboom J, Pouwels R (2003) Landscape cohesion: an index for the conservation potential of landscapes for biodiversity. Landscape Ecol 18:113–126
Parris KM, Schneider A (2009) Impacts of traffic noise and traffic volume on birds of roadside habitats. Ecol Soc 14(1):29
Pascual-Hortal L, Saura S (2006) Comparison and development of new graph-based landscape connectivity indices: towards the prioritization of habitat patches and corridors for conservation. Landscape Ecol 21:959–967
Rico A, Kindelmann P, Sedlacek F (2007) Barrier effects of roads on movements of small mammals. Folia Zool Praha 56(1):1
Riley SPD, Pollinger JP, Sauvajot RM, York EC, Bromley C, Fuller TK, Wayne RK (2006) A southern California freeway is a physical and social barrier to gene flow in carnivores. Mol Ecol 15(7):1733–1741
Rodrigues P, Aubrecht C, Gil A, Longcore T, Elvidge C (2012) Remote sensing to map influence of light pollution on Cory’s shearwater in São Miguel Island, Azores Archipelago. Eur J Wildl Res 58(1):147–155
Saisana M, Saltelli A (2010) Uncertainty and Sensitivity Analysis of the 2010 Environmental Performance Index. JRC Scientific and Technical Reports EUR 24269 EN 2010 Joint Research Centre European Commission, Institute for the Protection and Security of the Citizen
Saisana M, Srebotnjak T (2006) Robustness assessment for composite indicators of environmental control policies. 17th annual meeting of the International Environmetrics Society, Kalmar-Sweden, 18–22 June 2006
Sanderson EW, Jaiteh M, Levy MA, Redford KH, Wannebo AV, Woolmer G (2002) The human footprint and the last of the wild. Bioscience 52(10):891–904
Selva N, Kreft S, Kati V, Schluck M, Jonsson B, Mihok B, Okarma H, Ibisch PL (2011) Roadless and low-traffic areas as conservation targets in Europe. Environ Manage 48(5):865–877
Selva N, Switalski A, Kreft S, Ibisch PL (in prep) Why keep areas road free? the importance of roadless areas. In: van der Ree R, Grilo C, Smith D (eds.) Ecology of roads: a practitioners guide to impacts and mitigation
Spear SF, Balkenhol N, Fortin M, McRae BH, Scribner KI (2010) Use of resistance surfaces for landscape genetic studies: considerations for parameterization and analysis. Mol Ecol 19(17):3576–3591
Strittholt JR, Dellasala D (2001) Importance of roadless areas in biodiversity conservation in forested ecosystems: case study of the Klamath-Siskiyou ecoregion of the United States. Conserv Biol 15(6):1742–1754
Takahata C, Amin R, Sarma P, Banerjee G, Oliver W, Fa JE (2010) Remotely-sensed active fire data for protected area management: eight-year patterns in the Manas National Park, India. Environ Manage 45(2):414–423
Taylor BD, Goldingay RL (2010) Roads and wildlife: impacts, mitigation and implications for wildlife management in Australia. Wildl Res 37(4):320–331
Theobald DM (2008) Network and accessibility methods to estimate the human use of ecosystems. 11th AGILE international conference on geographic information science 2008
Trombulak SC, Frissell CA (2000) Review of ecological effects of roads on terrestrial and aquatic communities. Conserv Biol 14(1):18–30
Umweltbundesamt (2009) CORINE Land Cover (CLC2006). DLR-DFD
UNEP (2001) Globio: global methodology for mapping human impacts on the biosphere the Arctic 2050 scenario and global application. UNEP-DEWA, Nairobi
van der Ree R, Jaeger JAG, van der Grift EA, Clevenger AP (2011) Effects of roads and traffic on wildlife populations and landscape function: road ecology is moving toward larger scales. Ecol Soc 16(1):48
van Langevelde F, van Dooremalen C, Jaarsma CF (2009) Traffic mortality and the role of minor roads. J Environ Manage 90(1):660–667
von der Lippe M, von der Kowarik I (2007) Long-distance dispersal of plants by vehicles as a driver of plant invasions. Conserv Biol 21(4):986–996
Watkins RZ, Chen JQ, Pickens J, Brosofske KD (2003) Effects of forest roads on understory plants in a managed hardwood landscape. Conserv Biol 17(2):411–419
Wilkie D, Shaw E, Rotberg F, Morelli G, Auzel P (2000) Roads, development, and conservation in the Congo basin. Conserv Biol 14(6):1614–1622
Zurita GA, Pe’er G, Hansbauer MM, Bellocq (2012) Edge effects and the suitability of anthropogenic habitats for forest birds: taking a continuous approach. J Appl Ecol 49:503–512
Acknowledgments
This research project was part of the ‘roadless areas initiative’ of the Policy Committee of the Society for Conservation Biology—Europe Section and has been partially carried out within the framework of the cooperative graduate program ‘Adaptive Nature Conservation under Climate Change’. We would like to thank all funding partners and collaborators. The research project was partially funded by the Ministry of Science, Research and Culture of the Federal State of Brandenburg with resources from the European Social Fund. It has also been developed in the context of the project on climate change adaptation in nature conservation, Innovation Network Climate Change Adaptation Brandenburg Berlin (INKA BB), funded by the Federal Ministry for Education and Research. We are grateful to Wolfgang Cramer for comments on an earlier version of this paper. The leader and supervisor of the research team (PLI) acknowledges the awarding of the research professorship “Biodiversity and natural resource management under global change” by Eberswalde University for Sustainable Development. We appreciate the comments by two anonymous reviewers and the editor Jochen Jaeger, which greatly improved our paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Lisa Freudenberger led the manuscript elaboration. Slaven Rupic and Lisa Freudenberger conducted the research. Pierre L. Ibisch established the research approach and supervised the project. Lisa Freudenberger, Peter R. Hobson, Slaven Rupic, Guy Pe’er, Nuria Selva, Stefan Kreft and Pierre L. Ibisch wrote the manuscript. Martin Schluck and Julia Sauermann supported the research project through GIS related tasks.
Rights and permissions
About this article
Cite this article
Freudenberger, L., Hobson, P.R., Rupic, S. et al. Spatial road disturbance index (SPROADI) for conservation planning: a novel landscape index, demonstrated for the State of Brandenburg, Germany. Landscape Ecol 28, 1353–1369 (2013). https://doi.org/10.1007/s10980-013-9887-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-013-9887-8