
Abstract
We study some basic properties related to affine functions on Riemannian manifolds. A characterization for a function to be linear affine is given and a counterexample on Poincaré plane is provided, which, in particular, shows that assertions (i) and (ii) claimed by Papa Quiroz in (J Convex Anal 16(1):49–69, 2009, Proposition 3.4) are not true, and that the function involved in assertion (ii) is indeed not quasi-convex. Furthermore, we discuss the convexity properties of the sub-level sets of the function on Riemannian manifolds with constant sectional curvatures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Recent interests are focused on the topic on basic results related to affine functions on Riemannian manifolds; see, e.g., [1–3]. In particular, fixing a point \(x_0\) in a Hadamard manifold and a nonzero vector \(u_0\) in the tangent space at \(x_0\), one considers the special function \(f_0\), generated by the inner product between vector \(u_0\) and the inverse of the exponential map at point \(x_0\), and the associated parallel vector field \(X_0\), formed by the parallel transportation of the given vector \(u_0\) (see (5) and (6) in Sect. 3, respectively). Assertions (i) and (ii) below were claimed in [2, Proposition 3.4] (without the proof for assertion (ii)).
(i) The gradient of \(f_0\) is the associated parallel vector field \(X_0\);
(ii) \(f_0\) is linear affine.
Assertions (i) and (ii) have been used in [2, 4] to study the proximal point algorithm for quasi-convex/convex functions with Bregman distances on Hadamard manifolds, while assertion (ii) was also used in [5, 6] to establish some existence results of solutions for equilibrium problems and vector optimization problems on Hadamard manifolds, respectively. However, assertion (ii) is clearly not true in general because, by [1, p. 299, Theorem 2.1]), any twice differentiable linear affine function on Poincaré plane \({\mathbb {H}}\) (a two-dimensional Hadamard manifold of constant curvature \(-1\)) is constant. Indeed, it has been further shown in [3, Theorem 2.1] that assertion (ii) is true for all points \(x_0\) in the Hadamard manifold and vectors \(u_0\) in the corresponding tangent space if and only if the manifold is isometric to the Euclidean space \({\mathbb {R}}^n\). Furthermore, one can easily check that the function \(f_0\) is even not convex, in general, because, otherwise, one has that both \(f_0\) and \(-f_0\) are convex (and so linear affine). This motivates us to consider the following problems:
Problem 1
Is \(f_0\) quasi-convex?
Problem 2
Is assertion (i) true?
The first purpose of this paper is to present a characterization for linear affine functions on Hadamard manifolds in terms of assertion (i) and parallel transports, and to provide a counterexample on Poincaré plane to illustrate that the answer to each problem is negative. In particular for Problem 2, we show that the vector field \(X_0\) is even not a gradient field.
Our second purpose in the present paper is, in spirit of the negative answer to Problem 1, to study the convexity issue of sub-level sets of the function \(f_0\) mentioned above in Riemannian manifolds with constant sectional curvatures. Our main results provide the exact estimate of the constant c such that the sub-level set \(L_{c,f_0}\), consisting of all points x with value \(f_0(x)\) being no more than c, is strongly convex, which in particular improves and extends the corresponding result in [7, Corollary 3.1].
The paper is organized as follows. We review, in Sect. 2, some basic notions, notations, and some classical results of Riemannian geometry that will be needed afterward. The characterization for linear affine functions on Hadamard manifolds and the counterexample on Poincaré plane are presented in Sect. 3. Finally, in Sect. 4, the convexity properties of the sub-level sets of the function \(f_0\) in Riemannian manifolds with constant sectional curvatures are discussed.
2 Notations, Notions, and Preliminaries
In the present section, we present some basic notations, definitions, and properties of Riemannian manifolds. The readers are referred to some textbooks for details, for example [1, 8, 9].
Let M be a complete, simply connected n-dimensional Riemannian manifold with the Levi-Civita connection \(\nabla \) on M. We denote the tangent space at \(x\in M\) by \(T_{x}M\), and Let \(\mathcal {X}(M)\) denote all (\(C^\infty \)) vector fields on M. By \(\langle \cdot ,\cdot \rangle _{x}\) and \(\Vert \cdot \Vert _x\), we mean the corresponding Riemannian inner product and the norm on \(T_{x}M\), respectively (where the subscript x is sometimes omitted). For \(x,y\in {M}\), let \(\gamma :[0,1]\rightarrow M\) be a piecewise smooth curve joining x to y. Then, the arc-length of \(\gamma \) is defined by \(l(\gamma ):=\int _{0}^{1}\Vert \dot{\gamma }(t)\Vert \mathrm{d}t\), while the Riemannian distance from x to y is defined by \(\mathrm{d}(x,y):=\inf _{\gamma }l(\gamma )\), where the infimum is taken over all piecewise smooth curves \(\gamma :[0,1]\rightarrow M\) joining x to y. We use \({\mathbb {B}}(x,r)\) to denote the open metric ball at x with radius r, that is,
For a smooth curve \(\gamma \), if \(\dot{\gamma }\) is parallel along itself, then \(\gamma \) is called a geodesic, that is, a smooth curve \(\gamma \) is a geodesic if and only if \(\nabla _{\dot{\gamma }}{\dot{\gamma }}=0\). A geodesic \(\gamma :[0,1]\rightarrow M\) joining x to y is minimal if its arc-length equals its Riemannian distance between x and y. By the Hopf–Rinow theorem [8], \((M,\mathrm{d})\) is a complete metric space, and there is at least one minimal geodesic joining x to y. The set of all geodesics \(\gamma :[0,1]\rightarrow M\) with \(\gamma (0)=x\) and \(\gamma (1)=y\) is denoted by \({\varGamma }_{xy}\), that is,
We use \(\gamma _{xy}:[0,1]\rightarrow M\) to denote the minimal geodesic satisfying \(\gamma _{xy}(0)=x\) and \(\gamma _{xy}(1)=y\) if it is unique.
Let \(\gamma \) be a geodesic. We use \(P_{\gamma ,\cdot ,\cdot }\) to denote the parallel transport on the tangent bundle TM (defined below) along \(\gamma \) with respect to \(\nabla \), which is defined by
where X is the unique vector field satisfying
Then, for any \(a,b\in {\mathbb {R}}\), \(P_{\gamma ,\gamma (b),\gamma (a)}\) is an isometry from \(T_{\gamma (a)}M\) to \(T_{\gamma (b)}M\). We will write \(P_{y,x}\) instead of \(P_{\gamma ,y,x}\) in the case when \(\gamma \) is a minimal geodesic joining x to y and no confusion arises.
The exponential map of M at \(x\in M\) is denoted by \(\exp _x(\cdot ):T_xM\rightarrow M\). For a \(C^\infty \) function \(f:M\rightarrow {\mathbb {R}}\), \(\mathrm{grad}\,f\) and \(\mathrm{Hess}\, f\) denote its gradient vector and Hessian, respectively. Let \(X,Y\in \mathcal {X}(M)\). The Riemannian connection has the expression in terms of parallel transportation, that is,
where the curve \(\gamma \) with \(\gamma (0)=x\) and \(\dot{\gamma }(0)=X(x)\) (see, e.g., [9, p. 29 Exercise 5]).
A complete simply connected Riemannian manifold of non-positive sectional curvature is called a Hadamard manifold. The following proposition is well known about the Hadamard manifolds; see, e.g, [9, p. 221].
Proposition 2.1
Suppose that M is a Hadamard manifold. Let \(p\in M\). Then, \(\exp _p:T_pM\rightarrow M\) is a diffeomorphism, and for any two points \(p,q\in M\), there exists a unique normal geodesic joining p to q, which is in fact a minimal geodesic.
The following definition presents the notions of different convexities, where item (a) and (b) are known in [10]; see also [11–13].
Definition 2.1
Let Q be a non-empty subset of the Riemannian manifold M. Then, Q is said to be
(a) Weakly convex if, for any \(x,y\in Q\), there is a minimal geodesic of M joining x to y and it is in Q;
(b) Strongly convex if, for any \(x,y\in Q\), there is just one minimal geodesic of M joining x to y, and it is in Q.
All convexities in a Hadamard manifold coincide and are simply called the convexity. Let \(f:M\rightarrow \overline{{\mathbb {R}}}\) be a proper function, and let \(\mathrm{dom}\,f\) denote its domain, that is, \(\mathrm{dom}\,f:=\{x\in M:f(x)\ne \infty \}\). We use \({\varGamma }^f_{xy}\) to denote the set of all \(\gamma \in {\varGamma }_{xy}\) such that \(\gamma \subseteq \mathrm{dom}\,f\). In the following definition, item (a) is known in [14, 15] and item (b) is an extension of the one in [1, p. 59], which is introduced for the case when \(\mathrm{dom}\,f\) is totally convex.
Definition 2.2
Let \(f:M\rightarrow \overline{{\mathbb {R}}}\) be a proper function and suppose that \(\mathrm{dom}\,f\) is weakly convex. Then, f is said to be
(a) convex if
(b) quasi-convex if
Clearly, for a proper function f with a weakly convex domain, the convexity implies the quasi-convexity. Fixing \(c\in {\mathbb {R}}\), we use \(L_{c,f}\) to denote the sub-level set of f defined by
The following proposition describes the relationship between the convexities of a function f and its sub-level sets.
Proposition 2.2
Let \(f:M\rightarrow \overline{{\mathbb {R}}}\) be a proper function with weakly convex domain \(\mathrm{dom}\,f\). Then, f is quasi-convex if and only if, for each \(c\in {\mathbb {R}}\), the sub-level set \(L_{c,f}\) is totally convex with restricted to \(\mathrm{dom}\,f\) in the sense that for any \(x,y\in L_{c,f}\), if \(\gamma \in {\varGamma }^f_{xy}\) then \(\gamma \subseteq L_{c,f}\). In particular, f is quasi-convex if and only if \(L_{c,f}\) is strongly convex for each \(c\in {\mathbb {R}}\) in the case when \(\mathrm{dom}\,f\) is strongly convex.
Proof
We only consider the case when \(\mathrm{dom}\,f\) is weakly convex (otherwise when \(\mathrm{dom}\,f\) is strongly convex, the result is immediate by definition).
Suppose that f is quasi-convex. Take \(c\in {\mathbb {R}}\). Let \(x,y\in L_{c,f}\subseteq \mathrm{dom}\,f\) and let \(\gamma \in {\varGamma }_{xy}^f\). Then, \(f(x)\le c\) and \(f(y)\le c\). Noting that f is quasi-convex, it follows that
This implies that \(\gamma \subseteq L_{c,f}\) and so \(L_{c,f}\) is totally convex restricted to \(\mathrm{dom}\,f\) since \(x,y\in L_{c,f}\) and \(\gamma \in {\varGamma }_{xy}^f\) are arbitrary.
Conversely, suppose that \(L_{c,f}\) is totally convex restricted to \(\mathrm{dom}\,f\) for each \(c\in {\mathbb {R}}\). Let \(x,y\in \mathrm{dom}\,f\) and let \(\gamma \in {\varGamma }_{xy}^f\). Set \(c_0:=\max \{f(x),f(y)\}\). Then, by assumption, \(\gamma \subseteq L_{c_0,f}\), that is,
This implies that f is quasi-convex since \(x,y\in \mathrm{dom}\,f\) and \(\gamma \in {\varGamma }_{xy}^f\) are arbitrary. The proof is complete. \(\square \)
3 Linear Affine Functions and Counterexampls on Hadamard Manifolds
For the whole section, we assume that M is a Hadamard manifold. Consider a proper convex function \(f:M\rightarrow \overline{{\mathbb {R}}}\) on M. The subdifferential of f at \(x\in \mathrm{dom}\,f\) is defined by
By [1, p. 74] (see also [15, Proposition 6.2]), \(\partial f(x)\) is a non-empty, compact and convex set for any \(x\in \mathrm{int}(\mathrm{dom}\,f)\), where \(\mathrm{int}Q\) denotes the topological interior of a subset Q of M. Let \(f:M\rightarrow \overline{{\mathbb {R}}}\) be a proper function with convex domain. Recall that f is linear affine if both f and \(-f\) are convex. Furthermore, if f is of \(C^2\) and \(\mathrm{dom}\,f\) is open, its \(\mathrm{Hess}\,f\) is defined by
Then, by [1, p. 83, remark 6], we have that
Let \(x_0\in M\), and let \(u_0\in T_{x_0}M\). Then, the function \(f_0\) and the vector field \(X_0\) considered in the introduction can be formulated as
and
respectively. Thus, assertions (i) and (ii) in [2, Proposition 3.4] can be restated as follows:
(i) \(\mathrm{Grad}\,f_0=X_0\).
(ii) \(f_0\) is linear affine on M.
The following theorem presents, in particular, a characterization in Hadamard manifolds for assertion (ii) to be true in terms of assertion (i) and the parallel transports.
Theorem 3.1
Let \(f:M\rightarrow \overline{{\mathbb {R}}}\) be a proper function and suppose that \(\mathrm{dom}\,f\) is a non-empty open convex subset. If function f is linear affine, then, for any \(x_0\in \mathrm{dom}\,f\), there exists \(u_0\in T_{x_0}M\) such that
and
Conversely, if there exist \(x_0\in \mathrm{dom}\,f\) and \(u_0\in T_{x_0}M\) such that (7) and (8) hold, then f is linear affine.
Proof
Assume that f is linear affine. Then, both f and \(-f\) are convex. Take \(x_0\in \mathrm{dom}\,f\) and note that \( \mathrm{dom}\,f\) is open. It follows that both \(\partial f(x_0)\) and \(\partial (-f(x_0))\) are non-empty. Thus, one can chose \(u_0\in \partial f(x_0)\) and \(u_0'\in \partial (-f(x_0))\), respectively. Then, by definition, we have that, for any \(x\in \mathrm{dom}\,f\),
hence \( \langle u_0+u_0^{\prime },\exp _{x_0}^{-1}x\rangle _{x_0}\le 0 \) for any \(x\in \mathrm{dom}\,f\). This implies that \(u_0+u_0'=0\), that is \(u_0^{\prime }=-u_0\) (as \( \mathrm{dom}\,f\) is open). Thus, (9) follows from (10). Furthermore, noting that f is of class \(C^\infty \) by (9), one then has that \(\mathrm{Hess}\,f=0\) on \(\mathrm{dom}\,f\), that is,
In particular, one has that
where \({\gamma }_{xz}\) is the geodesic joining x and z, which lies in \(\mathrm{dom}\,f\). This, together with the definition of parallel transport (e.g., (1)), implies that
Note further that, for any \(u\in T_{x_0}M\), one has
It follows that \(\mathrm{grad}\,f(x_0)=u_0\). This, together with (11), implies that (7) and (8) hold.
Now, suppose that (7) and (8) hold for some \(x_0\in \mathrm{dom}\,f\) and \(u_0\in T_{x_0}M\). Let \(x\in \mathrm{dom}f\) and \(X\in \mathcal {X}(\mathrm{dom}\,f)\). Let \(\gamma :[-\varepsilon ,\varepsilon ]\rightarrow \mathrm{dom}\,f\) be the geodesic contained in \(\mathrm{dom}\,f\) with \(\gamma (0)=x\) and \(\dot{\gamma }(0)=X(x)\). Let \(t\in [-\varepsilon ,\varepsilon ]\). We see from (8) that
In light of (7), it follows that
Noting that \(P_{x,\gamma (t)}=P_{\gamma ,x,\gamma (t)}\), one gets by (3) that
Since \(X\in \mathcal {X}(\mathrm{dom}\,f)\) and \(x\in \mathrm{dom}\,f\) are arbitrary, we conclude that \(\mathrm{Hess}\,f=0\) on \(\mathrm{dom}\,f\), and so f is linear affine. The proof is complete. \(\square \)
Before considering Problems 1–2 proposed in the introduction which are related to the function \(f_0\) defined by (5), we make a remark regarding the quasi-convexity properties about composite functions. To this end, we have the following theorem, which is due to Udriste [1, p. 101, Theorem 10.9] in the special case when \(M=\tilde{M}\). The idea of the proof is the same as that for [1, p. 101, Theorem 10.9] (although the arguments presented there are not completely clear), and so we omit the proof here.
Theorem 3.2
Let \((\tilde{M},\tilde{\nabla })\) be a Riemannian manifold with Levi-Civita connection \(\tilde{\nabla }\) and \(D\subseteq \tilde{M}\) be a totally convex subset. If \(\varphi :D\rightarrow \mathbb {R}\) is a quasi-convex function on \((\tilde{M},\tilde{\nabla })\) and \(F:\tilde{M}\rightarrow M\) is a diffeomorphism, then \(\varphi \circ F^{-1}\) is a quasi-convex function on \((M,F_*\tilde{\nabla })\).
Remark 3.1
Recall that M is with the Levi-Civita connection \(\nabla \) and \(x_0\in M\), \(u_0\in T_{x_0}M\). Set \(\tilde{M}:=T_{x_0}M\), and let \(\tilde{M}\) be endowed with the Riemannian metric \(\tilde{g}\) given by \(\tilde{g}_x(\cdot ,\cdot ):=\langle \cdot ,\cdot \rangle _{x_0}\) for each \(x\in \tilde{M}\) (i.e., \(\tilde{M}\) is an n-dimensional Hilbert space). Let \(\tilde{\nabla }\) be the Levi-Civita connection compatible with the metric. Then, \(f_0\) (defined by (5)) can be written as \(f_0=\varphi \circ F^{-1}\), where \(F:\tilde{M} \rightarrow M\) and \(\varphi :\tilde{M}\rightarrow {\mathbb {R}}\) are defined by \(F(\cdot ):=\exp _{x_0}(\cdot )\) and
respectively. It is evident that \(\varphi \) is linear affine on \(\tilde{M}\) and F is a diffeomorphism by Proposition 2.1. Thus, one could apply Theorem 3.2 to conclude that the function \(f_0\) is quasi-convex on M with the connection \(F_*\tilde{\nabla }\) but not the Levi-Civita connection \(\nabla \). Indeed, we shall see from Example 3.1 below that \(f_0\) is not quasi-convex.
Recalling the equivalence (4), the following problem related to Problems 1-2 is also natural:
Problem 3
Does the vector field \(X_0\) satisfy
The remainder of this section is to construct a counterexample on Poincaré plane to show that the answer to each of Problems 1–3 is negative. To do this, let
be the Poincaré plane endowed with the Riemannian metric, in terms of the natural coordinate system, defined by
The sectional curvature of \({\mathbb {H}}\) is equal to \(-1\) (see, e.g., [8, p. 160]), and the geodesics on \({\mathbb {H}}\) are the semilines \(\gamma (a;\cdot ):=(\gamma ^1(a;\cdot ),\gamma ^2(a;\cdot ))\) (through (a, 1)), and the semicircles \(\gamma (b,r;\cdot ):=(\gamma ^1(b,r;\cdot ),\gamma ^2(b,r;\cdot ))\) with center at (b, r) and radius r), which admit the following natural parameterizations:
respectively; see, e.g., [1, p. 298].
By [1, p. 297], the Riemannian connection \(\nabla \) on \({\mathbb {H}}\) (in terms of the natural coordinate system) has the components:
Hence, noting the expression of the connection \(\nabla \) given in [8, p. 51], one has the following formula for the connection \(\nabla _{(\cdot )}(\cdot ):=\left( \nabla ^1_{(\cdot )}(\cdot ),\nabla ^2_{(\cdot )}(\cdot )\right) \) on \({\mathbb {H}}\) with
and
for any \(X:=(X^1,X^2),Y:=(Y^1,Y^2)\in \mathcal {X}({\mathbb {H}})\), where and in sequel, for a differential function \(\phi \) on \({\mathbb {H}}\), \(\frac{\partial \phi }{\partial t_1}\) and \(\frac{\partial \phi }{\partial t_2}\) denote the classical partial derivatives of \(\phi \) in \({\mathbb {R}}^2\) with respect to the first variable \(t_1\) and the second variable \(t_2\), respectively. Consider a differentiable function \(f:{\mathbb {H}}\rightarrow {\mathbb {R}}\). Then, using (12), one concludes that the gradient vector \(\mathrm{grad}\, f\) and the differential \(\mathrm{d}f\) of f are, respectively, given by
and
for any \(x=(t_1,t_2)\in {\mathbb {H}}\); see, e.g., [1, p. 8].
For convenience, we also need the expressions of the exponential map \(\exp _{x}^{-1}y\) and the geodesic \(\gamma _{xy}\) joining x to y, which can be found in [16]. To this end, let \(x:=(t_1,t_2)\) and \(y:=(s_1,s_2)\) be in \( {\mathbb {H}}\), and set for any x, y with \(t_1\ne s_1\),
and
For saving of printing space, we use \(\omega \) to denote the inverse function of the hyperbolic tangent function \(\mathrm{tanh}\), that is,
Then, one has
and \(\gamma _{xy}:=\left( \gamma _{xy}^1,\gamma _{xy}^2\right) \) with \(\gamma _{xy}^1\) and \(\gamma _{xy}^2\) defined, respectively, by
and
for any \(s\in [0,1]\). Now, we are ready to present the counterexample.
Example 3.1
Let \(x_0:=(0,1)\), and let \(u_0:=(0,1)\in T_{x_0}{\mathbb {H}}\) be a unit vector. Let \(f_0:{\mathbb {H}}\rightarrow {\mathbb {R}}\) and \(X_0:{\mathbb {H}}\rightarrow T{\mathbb {H}}\) be the function and the vector field defined by
and
respectively. We claim that, for each \(x=(t_1,t_2)\in {\mathbb {H}}\),
and
where, for any x with \(t_1\ne 0\),
Indeed, let \(x=(t_1,t_2)\in {\mathbb {H}}\). Then, by (20), we get that
thus (25) follows immediately from definition. To check (26), let \(\gamma \) be the geodesic through x and \(x_0\). By the definition of \(X_0\) and thanks to (2), we have to show \(\nabla _{\dot{\gamma }}X_0=0\). To do this, write \(X_0:=(X^1_0,X^2_0)\) and \(\gamma :=(\gamma ^1,\gamma ^2)\). Then,
and
In expression of the differential equations (see, e.g., [8, p. 53]), we only need to verify that \(X_0\) and \(\gamma \) satisfy
Without loss of generality, we assume that \(t_1\ne 0\) and adopt the expression (13) of the geodesic, that is, \((\gamma ^1(\cdot ),\gamma ^2(\cdot )) = (\gamma ^1(b_x,r_x;\cdot ),\gamma ^2(b_x,r_x;\cdot ))\) with
for any \(s\in {\mathbb {R}}\left( \hbox {noting } x_0=\gamma \left( b_x,r_x;\mathrm{\omega }(\frac{b_x}{r_x})\right) \hbox {and } x=\gamma \left( b_x,r_x;\mathrm{\omega }(\frac{b_x-t_1}{r_x})\right) \right) \), where \(b_x\) and \(r_x\) are defined by (27). Thus, using (31), one conclude that, for each \(s\in {\mathbb {R}}\),
and so
Moreover, we also have that
for any \(s\in {\mathbb {R}}\). Thus, (30) is seen to hold. Hence, \(\nabla _{\dot{\gamma }}X_0=0\), and (26) is checked.
Below we show the following assertions:
(i) \(f_0\) is not quasi-convex.
(ii) \(\mathrm{Grad}\,f_0\ne X_0\).
(iii) \(\nabla _{\frac{\partial }{\partial t_1}}X_0\ne 0\).
(iv) \(X_0\) is not a gradient vector field.
To show assertion (i), take \(x=(\frac{1}{2},\frac{1}{2}),\ y=(-\frac{1}{2},\frac{1}{2})\in {\mathbb {H}}\), and let \(c_0:=-0.4\). Then, \(x,y\in L_{c_0,f_0}\) because, by (25) and (27),
Let \(\gamma _{xy}=(\gamma ^1_{xy},\gamma ^2_{xy})\) be the geodesic segment joining x to y. Then, for any \(s\in [0,1]\),
and
thanks to (18), (19), (21), and (22). Hence, \(\gamma _{xy}(\frac{1}{2})=(0,\frac{1}{\sqrt{2}})\), and
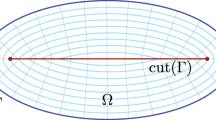
by (25). This means that \(\gamma _{xy}(\frac{1}{2})\not \in L_{c,f_0}\), and so \(L_{c,f_0}\) is not convex; see Fig. 1. In view of Proposition 2.2, we see that \(f_0\) is not quasi-convex, and assertion (i) holds.
To show assertion (ii), take \(z:=(2,1)\). Then,
(see (27)). Therefore, we have by (26) that \(X_0(z)=(1,0)\). On the other hand, we get from (16) that
where \(\frac{\partial f_0}{\partial t_1}\) and \(\frac{\partial f_0}{\partial t_2}\) are classical partial derivatives in \({\mathbb {R}}^2\). Then, using (25) and (27), one calculates
Therefore, \(\mathrm{grad}\,f_0(z)\ne X_0(z)\), and assertion (ii) is checked. We further have that
Granting this, assertion (iii) is also checked. To show (33), we get from (14) and (15) that
(noting that \({\frac{\partial }{\partial t_1}} =(1,0)\) for any \(x\in {\mathbb {H}}\)). Recalling that \(X_0^1\) and \(X_0^2\) are given by (28), (29), and \(z:=(2,1)\), we have that \(X_0^1(z)=1\) and \(X_0^2(z)=0\) (noting (32)). Furthermore, by elemental calculus, we can calculate the partial derivatives
Thus, we conclude from (34) that \(\nabla _{\frac{\partial }{\partial t_1}}X_0\mid _{z}=(0,\frac{1}{2})\ne 0\), as desired to show.
For assertion (iv), we suppose on the contrary that there exists a \(C^\infty \) function f such that \(X_0=\mathrm{grad}\,f\). Then, \(\mathrm{d}\circ \mathrm{d}f =0\) by the fundamental property (see, e.g., [9, p. 17]). To proceed, note that \(X_0=X_0^1\frac{\partial }{\partial t_1}+X_0^2\frac{\partial }{\partial t_2}\), where \(X_0^1\) and \(X_0^2\) are defined by (28) and(29), respectively. Then, we calculate by elementary calculus that
Furthermore, by (16) and (17), one has that
and so the exterior differentiation
where \(\wedge \) is the exterior product; see, e.g., [9, p. 17]. This, together with (35), means that \(\mathrm{d}\circ \mathrm{d}f\not =0\), and so assertion (iv) is shown.

Non-convexity of the sub-level set \(L_{-0.4,f}\)
4 Convexity Properties of Sub-Level Sets on Riemannian Manifolds
Throughout this section, let \(\kappa \in {\mathbb {R}}\) and assume that M is a n-dimensional complete, simply connected Riemannian manifold of constant sectional curvature \(\kappa \). Let \({\mathbb {R}}^n\) be the n-dimensional Euclidean space, \(\mathbb {S}_\rho ^n\) be the n-dimensional sphere of radius \(\frac{1}{\sqrt{\rho }}\) in \({\mathbb {R}}^{n+1}\) and \({\mathbb {H}}_\rho ^n\) be the manifold obtained from the hyperbolic space \({\mathbb {H}}^n\) by multiplying the Riemannian metric by the positive constant \(\frac{1}{\rho }>0\). Then, M is isometric to
(a) \({\mathbb {H}}_\kappa ^n\), if \(\kappa <0\),
(b) \(\mathbb {S}_\kappa ^n\), if \(\kappa >0\),
(c) \({\mathbb {R}}^n\), if \(\kappa =0\);
see, e.g., [9, p. 135]. As usual, define \(D_\kappa :=\frac{\pi }{\sqrt{\kappa }}\) if \(\kappa >0\) and \(D_\kappa :=+\infty \) otherwise. The proposition below is a direct consequence of [17, Propositions 1.4 and 1.7]; see also [15, Proposition 4.1].
Proposition 4.1
Let \(x,y\in M\). We have the following assertions:
(i) If \(\mathrm{d}(x,y)<D_\kappa \), then \({\varGamma }_{xy}\) contains a unique minimal geodesic \(\gamma _{xy}\).
(ii) Any open ball \({\mathbb {B}}(x,r)\) with \(r\le \frac{D_\kappa }{2}\) is strongly convex.
Let \(x_0\in M\) and \(u_0\in T_{x_0}M\setminus \{0\}\). Consider the following function \(f_0:M\rightarrow \overline{{\mathbb {R}}}\) defined by
where \({\gamma }_{x_0x}(0)\in {{\varGamma }}_{x_0x}\) is the unique minimal geodesic lying in \({\mathbb {B}}(x_0,\frac{D_\kappa }{2})\). It is clear that \(\mathrm{dom}\,f_0={\mathbb {B}}(x_0,\frac{D_\kappa }{2})\) is strongly convex. If M is a Hadamard manifold, function (36) is reduced to the function defined by (23), that is,
For any \(c\in {\mathbb {R}}\), the sub-level set of \(f_0\) is denoted by \(L_{c,f_0}(c\in {\mathbb {R}})\) and defined by
Note by Example 3.1 that \(L_{c,f_0}\) is not strongly convex in general. This section is devoted to estimating the constant c such that the sub-level set \(L_{c,f_0}\) is strongly convex. For this purpose, we first recall that a geodesic triangle \(\triangle (p_{1}p_{2}p_{3})\) in M is a figure consisting of three points \(p_{1},p_{2},p_{3}\) (the vertices of \(\triangle (p_{1}p_{2}p_{3})\)) and three minimal geodesic segments \(\gamma _{i}\) (the edges of \(\triangle (p_{1}p_{2}p_{3})\)) such that \(\gamma _i(0)=p_{i-1}\) and \(\gamma _i(1)=p_{i+1}\) with \(i=1,2,3\) ( mod3). For each \(i=1,2,3\) ( mod3), the inner angle of \(\triangle (p_{1}p_{2}p_{3})\) at \(p_{i}\) is denoted by \(\angle p_{i}\), which equals the angle between the tangent vectors \(\dot{\gamma }_{i+1}(0)\) and \(-\dot{\gamma }_{i-1}(1)\). The following proposition (i.e., comparison theorem for triangles) follows immediately from [9, p.161 Theorem 4.2 (ii), p. 138 Low of Cosines and p. 167 Remark 4.6].
Proposition 4.2
Let \(\triangle (p_{1}p_{2}p_{3})\) be a geodesic triangle in M of the perimeter less than \(2D_{\kappa }\). Set \(l_i=\mathrm{d}(p_{i+1},p_{i-1})\) for each \(i=1,2,3\). Then, the following relations hold:
and
Recall from [18, p. 104] that a k-dimensional submanifold \(N\subset M\) is totally geodesic if any geodesic in N is also a geodesic in M. Another property for a complete, simply connected Riemannian manifolds of constant curvature, which will be used in sequel, is the axiom of plane described as follows: (see, e.g., [9, p. 137]):
Proposition 4.3
Let \(x\in M\), and let W be a m-dimensional subspace of \(T_xM\) (\(m\ge 2\)). Then, the submanifold \(N:=\exp _xW\) is a m-dimensional totally geodesic and complete simply connected Riemannian manifold of constant curvature \(\kappa \), that is, N is isometric to \({\mathbb {H}}_{\kappa }^m\) if \(\kappa <0\) and to \(\mathbb {S}_{\kappa }^m\) if \(\kappa >0\).
The following lemma, taken from [19, Theorem 3.1 and Remark 3.6], plays a very key role in our study afterward.
Lemma 4.1
Let \(\triangle (ypq)\) be a geodesic triangle in M of the perimeter less than \(2D_\kappa \). Let \(\triangle (\tilde{y}\tilde{p}\tilde{q})\) be a triangle in \({\mathbb {R}}^2\) such that
Let x be in the minimal geodesic joining p to q, and \(\tilde{x}\) be the corresponding point in the interval \([\tilde{p},\tilde{q}]\) satisfying
(see Fig. 2). Then, the following assertions hold:

Recall that \(\gamma _{xy}\) is the unique minimal geodesic joining x to y for any \(x,y\in M\) with \(\mathrm{d}(x,y)<D_\kappa \) (see Proposition 4.1(i)).
Lemma 4.2
Let \(\triangle (ypq)\) be a geodesic triangle in M of the perimeter less than \(2D_\kappa \). Let \(\gamma :=\gamma _{pq}:[0,1]\rightarrow M\) be the unique minimal geodesic joining p to q. Then, for each \(t\in ]0,1[\), there exist two positive numbers \(a_t\) and \(b_t\) satisfying
such that
Proof
Set \(N:=\exp _y\{\mathrm{span}\{\dot{\gamma }_{yp}(0),\dot{\gamma }_{yq}(0)\}\}\). By assumption, we see from Proposition 4.3 that \(\gamma \subset N\), and so
Thus, there exist some \(a_t,b_t\in {\mathbb {R}}\) such that (44) holds (see Fig. 2).
Below, we show that \(a_t,b_t\) are positive and satisfy (43). To this end, as in Lemma 4.1 (see Fig. 2), set \(x=\gamma (t)\), and let \(\triangle (\tilde{y}\tilde{p}\tilde{q})\) be the corresponding triangle of \(\triangle (ypq)\) in \({\mathbb {R}}^2\) satisfying (40) and \(\tilde{x}\) be the corresponding point in the interval \([\tilde{p},\tilde{q}]\) satisfying (41). Without loss of generality, we may assume by (40) that \(\overrightarrow{\tilde{y}\tilde{p}}=\dot{\gamma }_{yp}(0)\) and \(\overrightarrow{\tilde{y}\tilde{q}}=\dot{\gamma }_{yq}(0)\). Note, by (45), that the vectors \(\overrightarrow{\tilde{y}\tilde{x}}\) and \(\dot{\gamma }_{yx}(0)\) are in the same 2-dimensional Euclidean plane. It follows from (41), together with (44), that there exists some \(\lambda >0\) such that
Note that \(\tilde{x}\) lies actually in the open interval \((\tilde{p},\tilde{q})\) in \({\mathbb {R}}^2\) (as \(0<t<1\) and so \( \angle \tilde{p}\tilde{y}\tilde{x}>0,\; \angle \tilde{q}\tilde{y}\tilde{x}>0\) by (41)). It follows from (46) that
Furthermore, in view of (42), we see that \(\lambda \le 1\) if \( \kappa \ge 0\) and \(\lambda \ge 1\) if \(\kappa \le 0\). This, together with (47), implies that (43) holds and the proof is complete. \(\square \)
Recall that M is assumed to be of constant sectional curvature \(\kappa \). Now, we are ready to verify the first theorem in the present section.
Theorem 4.1
Suppose \(\kappa >0\), and let \(f_0\) be the function defined by (36). Then, the sub-level set \(L_{c,f_0}\) is strongly convex if and only if either \(c\le 0\) or \(c\ge \frac{\Vert u_0\Vert D_\kappa }{2}\).
Proof
We first show the sufficiency part. To do this, suppose that \(c\le 0\) or \(c\ge \frac{\Vert u_0\Vert D_\kappa }{2}\). Note that if \(c\ge \frac{\Vert u_0\Vert D_\kappa }{2}\), then \(L_{c,f_0}={\mathbb {B}}(x_0,\frac{D_\kappa }{2})\) is strongly convex because
holds for all \(x\in {\mathbb {B}}(x_0,\frac{D_\kappa }{2})\). Thus, we need only to consider the case when \(c\le 0\). To proceed, fix \(c\le 0\), and let \(p,q\in L_{c,f_0}\), that is,
Then, \(p,q\in {\mathbb {B}}(x_0,\frac{D_\kappa }{2})\) and the geodesic triangle \(\triangle (x_0pq)\) is well defined with perimeter less than \(2D_\kappa \). Let \(t\in [0,1]\). By assumption, Lemma 4.2 is applicable to concluding that there exist two positive numbers \(a_t\) and \(b_t\) satisfying with \(a_t+b_t\ge 1\) such that
where \(\gamma :=\gamma _{pq}:[0,1]\rightarrow M\) is the unique minimal geodesic joining p and q. It follows from (36) and (48) that
(note that \(c<0\)). This means that \(\gamma _{p,q}(t)=\gamma (t)\in L_{c,f_0}\) for all \(t\in [0,1]\), and so \(L_{c,f_0}\) is strongly convex as desired to show. The proof for the sufficiency part is complete.
To show the necessity part, without loss of generality, we may assume that \(\Vert u_0\Vert =1\). Let \(0<c<\frac{D_\kappa }{2}\). It suffices to verify that \(L_{c,f_0}\) is not strongly convex, or equivalently, to construct two points \(p,\,q\) and a number \(\bar{t}\in ]0,1[\) such that
To do this, consider the geodesic \(\gamma :[0, \frac{D_\kappa }{2})\rightarrow M\) defined by
Clearly, it is contained in \({\mathbb {B}}\left( x_0,\frac{D_\kappa }{2}\right) \). Since \({\mathbb {B}}\left( x_0,\frac{D_\kappa }{2}\right) \) is strongly convex, we see that, for each \( t\in [0, \frac{D_\kappa }{2}[\), the unique minimal geodesic joining \(x_0\) and \(\gamma (t)\) can be expressed as
This in particular implies that, for each \( t\in [0, \frac{D_\kappa }{2}[\), \(\dot{\gamma }_{x_0\gamma (t)}(0)=tu_0\) and so
Hence,
In particular, \(z:=\gamma (c) \in L_{c,f_0}\) with
by the choice of c. Take \(u\in T_zM\) such that \(u\perp \dot{\gamma }(c)\). Then, by (52), there exists some \(\varepsilon >0\) such that the geodesic \(\tau :[-\varepsilon ,\varepsilon ]\rightarrow M\), determined by
is contained in \({\mathbb {B}}\left( x_0,\frac{D_\kappa }{2}\right) \cap {\mathbb {B}}\left( z,\frac{D_\kappa }{2}\right) \). Set \(p_{\varepsilon }:=\tau (\varepsilon )\) and \(q_{\varepsilon }:=\tau (-\varepsilon )\). Then,
Below, we shall show that
Consider the geodesic triangle \(\triangle (x_0zp_\varepsilon )\). Then, its perimeter is less than \(2D_\kappa \) thanks to (52) and (54). Thus, Proposition 4.2 is applicable, and using (39), we have that
(noting that \(\angle p_\varepsilon zx_0=\frac{\pi }{2}\) as \(\dot{\tau }(0)\perp \dot{\gamma }(c)\)), and
Combining these two inequalities, we get that
Thus,
where the last equality holds because of (52). Similarly, we have \(f_0(q_\varepsilon )<c\) and (55) is shown.
Let \(\gamma _{x_0}:[0,\infty )\rightarrow M\) be the geodesic satisfying \(\gamma _{x_0}\mid _{[0,1]}=\gamma _{x_0p_\varepsilon }\). In light of (54) and (55), we get by the continuity of \(f_0\) that there exists \(t_0>1\) such that \(\gamma _{x_0}\mid _{[0,t_0]}\) is the minimal geodesic joining \(x_0\) and \(\gamma _{x_0}(t_0)\) and \(\gamma _{x_0}(t_0)\in L_{c,f_0}\). Set \(p :=\gamma _{x_0}(t_0)\) and \(q:=q_{\varepsilon }\). Then, \(p,\; q\in L_{c,f_0}\) \(\left( \text {and so } p,q\in {\mathbb {B}}\left( x_0,\frac{D_\kappa }{2}\right) \right) \). Since \({\mathbb {B}}\left( x_0,\frac{D_\kappa }{2}\right) \) is strongly convex by Proposition 4.1(ii), it follows that \(\gamma _{pq}\subset {\mathbb {B}}(x_0,\frac{D_\kappa }{2})\). We further show that
Granting this, (49) is established. To show (56), write
where \(\tau \) and \(\gamma \) are geodesics defined by (53) and (50), respectively. Then, N is isometric to \(\mathbb {S}_{\kappa }^2\) by Proposition 4.3, and we assume that \(N=\mathbb {S}_{\kappa }^2\) without loss of generality. Noting that \(x_0=\gamma (0)\), \(z=\gamma (c)=\tau (0)\), \(p_\varepsilon =\tau (\varepsilon )\) and \(q=\tau (-\varepsilon )\), we have that \(x_0,q,p_\varepsilon ,z\) lie in \(\mathbb {S}_{\kappa }^2\). Recall that \(\gamma _{x_0}\) is the geodesic passing through \(x_0\) and \(p_\varepsilon \). It follows that \(p=\gamma _{x_0}(t_0)\) is also in \(\mathbb {S}_{\kappa }^2\). By the definition of the geodesic \(\gamma \) and the choice of the points \(p,\,q\) in the two-dimensional sphere \(\mathbb {S}_{\kappa }^2\), one checks that \(\gamma _{pq}\) must meet \(\gamma \) at some point \(\bar{z}:=\gamma _{pq}(\bar{t})=\gamma (c_0)\) with \(\bar{t}\in (0,1)\) and \(c_0>c\) (see Fig. 3). Hence, \(\bar{z}\not \in L_{c,f_0}\) thanks to(51). Thus, (56) is shown, and the proof is complete. \(\square \)

Non-convexity of the sub-level set \(L_{c,f}\) for some \(0<c<\frac{D_\kappa }{2}\) in Theorem 4.1
Our second theorem in this section is Theorem 4.2 below, which is an analogue of Theorem 4.1 on Hadamard manifold of constant sectional curvature. In particular, Theorem 4.2 improves and extends the corresponding result in [7, Corollary 3.1], where it was shown that the sub-level sets \(L_{c,f_0}\) are convex in the special case when \(c=0\). The proof of Theorem 4.2 is quite similar to that we did for Theorem 4.1 and so we omit it here.
Theorem 4.2
Suppose \(\kappa <0\), and let \(f_0\) be the function defined by (37). Then, \(L_{c,f_0}\) is convex if and only if \(c\ge 0\).
As a direct consequence of Theorems 4.1 and 4.2, together with Proposition 2.2, we have the following corollary which shows that the function defined by (36) is not quasi-convex in general.
Corollary 4.1
Suppose that M is of nonzero constant sectional curvature. Let \(x_0\in M\) and \(u_0\in T_{x_0}M\setminus \{0\}\). Then, the functions defined by (36) are not quasi-convex.
5 Conclusions
The function \(f_0:M\rightarrow {\mathbb {R}}\) defined by (36) is widely used in equilibrium problems, vector optimization problems, and the proximal point algorithm in Riemannian manifolds. Such class of functions is clearly linear affine in Euclidean spaces; we obtain some basic results related to the function \(f_0\), and our results show that it is not quasi-convex even in Poincaré plane. Moreover, we estimate the constant c such that the sub-level set \(L_{c,f_0}\) is strongly convex in Riemannian manifolds of constant curvatures. The results could be used to study some existence results in equilibrium problems and vector optimization problems in Riemannian manifolds of constant curvatures. However, it remains open to estimate the constant c such that the sub-level set \(L_{c,f_0}\) is strongly convex in general Riemannian manifolds, or in Riemannian manifolds of bounded constant curvatures, and this is one possible direction for our future work.
References
Udriste, C.: Convex functions and optimization methods on Riemannian manifolds. Mathematics and Its Applications, vol. 297. Kluwer Academic, Dordrecht (1994)
Papa Quiroz, E.A., Oliveira, P.R.: Proximal point methods for quasiconvex and convex functions with Bregman distances on Hadamard manifolds. J. Convex Anal. 16(1), 49–69 (2009)
Kristály, A., Li, C., López, G., Nicolae, A.: What do “convexities” imply on Hadamard manifolds?. J. Optim. Theory Appl. doi:10.1007/s10957-015-0780-2
Quiroz, EAPapa: An extension of the proximal point algorithm with Bregman distances on Hadamard manifolds. J. Glob. Optim. 56(1), 43–59 (2013)
Colao, V., López, G., Marino, G., Martín-Márquez, V.: Equilibrium problems in Hadamard manifolds. J. Math. Anal. Appl. 388(1), 61–77 (2012)
Zhou, L., Huang, N.: Existence of solutions for vector optimization on Hadamard manifolds. J. Optim. Theory Appl. 157(1), 44–53 (2013)
Ferreira, O.P., Lucambio Pérez, L.R., Németh, S.Z.: Singularities of monotone vector fields and an extragradient-type algorithm. J. Glob. Optim. 31, 133–151 (2005)
do Carmo, M.P.: Riemannian Geometry. Birkhäuser Boston, Boston (1992)
Sakai, T.: Riemannian Geometry. Translations of Mathematical Monographs, vol. 149. American Mathematical Society, Providence (1996)
Cheeger, J., Gromoll, D.: On the structure of complete manifolds of nonnegative curvature. Ann. Math. 96, 413–443 (1972)
Li, S.L., Li, C., Yao, J.C.: Existence of solutions for variational inequalities on Riemannian manifolds. Nonlinear Anal. 71, 5695–5706 (2009)
Walter, R.: On the metric projection onto convex sets in Riemannian spaces. Arch. Math. 25, 91–98 (1974)
Wang, J.H., López, G., Martín-Márquez, V., Li, C.: Monotone and accretive vector fields on Riemannian manifolds. J. Optim. Theory Appl. 146, 691–708 (2010)
Li, C., Mordukhovich, B.S., Wang, J.H., Yao, J.C.: Weak sharp minima on Riemannian manifolds. SIAM J. Optim. 21, 1523–1560 (2011)
Li, C., Yao, J.C.: Variational inequalities for set-valued vector fields on Riemannian manifolds: convexity of the solution set and the proximal point algorithm. SIAM J. Control Optim. 50(4), 2486–2514 (2012)
Wang, X.M., Li, C., Yao, J.C.: Projection algorithms for solving convex feasibility problems on Hadamard manifolds. J. Nonliner Convex Anal (in press)
Bridson, M., Haefliger, A.: Metric Spaces of Non-positive Curvature. Springer, Berlin (1999)
O’Neill, B.: Semi-Riemannian Geometry, with Applications to Relativity. Academic Press, San Diego (1983)
Afsari, B., Tron, R., Vidal, R.: On the convergence of gradient descent for finding the Riemannian center of mass. SIAM J. Control Optim. 51(3), 2230–2260 (2013)
Acknowledgments
The authors are grateful to both anonymous reviewers for their valuable suggestions and remarks. Research of the first author is supported in part by the Scientific Research Projects of Guizhou University (Grant 201406). Research of the second author is supported in part by the National Natural Science Foundation of China (Grants 11571308, 11371325). Research of the third author is supported in part by the Grant MOST 102-2115-M-039-003-MY3.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Sándor Zoltán Németh.
Rights and permissions
About this article

Cite this article
Wang, X., Li, C. & Yao, JC. On Some Basic Results Related to Affine Functions on Riemannian Manifolds. J Optim Theory Appl 170, 783–803 (2016). https://doi.org/10.1007/s10957-016-0979-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-016-0979-x
Keywords
- Riemannian manifold
- Hadamard manifold
- Sectional curvature
- Convex function
- Quasi-convex function
- Linear affine function