
Abstract
This paper presents a high-order \(\mathcal{D}^{\alpha}\)-type iterative learning control (ILC) scheme for a class of fractional-order nonlinear time-delay systems. First, a discrete system for \(\mathcal{D}^{\alpha}\)-type ILC is established by analyzing the control and learning processes, and the ILC design problem is then converted to a stabilization problem for this discrete system. Next, by introducing a suitable norm and using a generalized Gronwall–Bellman Lemma, the sufficiency condition for the robust convergence with respect to the bounded external disturbance of the control input and the tracking errors is obtained. Finally, the validity of the method is verified by a numerical example.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional differential calculus [1, 2], an old mathematical topic from the 17th century, has recently attracted a rapid growth in the number of applications. It was found that many systems in interdisciplinary fields could be elegantly described with the help of fractional derivatives and integrals [3, 4]. Also, fractional-order controllers have so far been implemented to enhance the robustness and the performance of the control systems [5–7].
Iterative learning control (ILC) is an approach for improving the transient performance of systems that operate repetitively over a fixed time interval [8, 9]. Owing to its simplicity and effectiveness, ILC has been found to be a good alternative in many areas and applications (see, for instance, [10, 11] and the referenced therein). In recent years, the application of ILC to the fractional-order systems has become a new topic [4, 12–14]. The authors in [12] were the first to propose the \(\mathcal{D}^{\alpha}\)-type ILC algorithm in frequency domain. For fractional-order linear systems described in the state space form, the convergence conditions are derived in [5]. In [13], the asymptotic stability of P\(\mathcal{D}^{\alpha}\)-type ILC for a fractional-order linear time invariant (LTI) system was investigated. The convergence condition of open-loop P-type ILC for fractional-order nonlinear system was studied in [14].
It should be noted that the higher-order learning algorithms are the ones in which the information from past cycles, not just from the last cycle, is taken advantage of. As a result, developing higher-order learning algorithms can lead to better performance in terms of both robustness and convergence rate [11, 15, 16]. The key idea of the presented method was to use past information of more than one to update the current adaptation learning law.
In this paper, we investigated a high-order \(\mathcal{D}^{\alpha}\)-type ILC updating law design method for a class of fractional-order nonlinear time-delay systems. The rest of this paper is organized as follows. In Sect. 2, the fractional derivative and some preliminaries are presented. The high-order \(\mathcal{D}^{\alpha}\)-type ILC scheme as well as the convergence condition for fractional-order systems is discussed in Sect. 3. MATLAB/SIMULINK results are shown in Sect. 4. Finally, some conclusions are drawn in Sect. 5.
2 Fractional Derivative and Preliminaries
In this section, some basic definitions and properties (for more details see [1]) are introduced, which will be used in the following sections.
Definition 2.1
The definition of fractional integral is described by

where Γ(⋅) is the well-known Gamma function.
Definition 2.2
The Riemann–Liouville derivative is defined as

and the Caputo derivative is

where m∈ℤ+, D m is the classical m-order derivative.
Definition 2.3
[1]
The two-parameter Mittag–Leffler function is defined by

Property 2.1
[1]
The fractional-order differentiation or integral of Mittag–Leffler function is
where ρ<β, \(\mathcal{D}\) denotes either the Riemann–Liouville or Caputo fractional-order operator.
Lemma 2.1
If the function f(t,x) is continuous, then the initial value problem
is equivalent to the following nonlinear Volterra integral equation:

and its solutions are continuous [17]. The initial value problem:
is equivalent to the following nonlinear Volterra integral equation [18]:

Lemma 2.2
(Generalized Gronwall Inequality, [14])
Let u(t) be a continuous function on t∈[0,T] and let v(t−τ) be continuous and nonnegative on the triangle 0≤τ≤T. Moreover, let w(t) be a positive continuous and non-decreasing function on t∈[0,T]. If
then
Throughout this paper, the 2-norm for the n-dimensional vector w=(w 1,w 2,…,w n ) and the matrix A n×n is defined as \(\|w\|:=\sqrt{\sum^{n}_{i=1}w^{2}_{i}}\), \(\|A\|:=\sqrt{\lambda_{\max}(A^{T}A)}\), respectively. The λ-norm for n-vector-valued function h(t):[0,T]→ℝn is defined as
while the (λ,ξ)-norm for m-vector-valued function g k (t):[0,T]→ℝm, k∈{0,1,2,…} is defined as
where ∥⋅∥ can be chosen as any kind of norm.
3 High-Order \(\mathcal{D}^{\alpha}\)-Type ILC for Fractional-Order Nonlinear Time-Delay Systems
Consider the following fractional-order nonlinear time-delay system:
where k∈{0,1,2,…},t∈[0,T],0<α<1.

x k (t)∈ℝn is the state of the plant, and u k (t)∈ℝm and y k (t)∈ℝm are the control input and output, respectively. A,A 1,B,C and D are constant system matrices with appropriate dimensions, τ is a pure delay and with the associated function of the initial state: x k (t)=ψ(t),−τ≤t≤0. ψ(t) is a given continuous function on [−τ,0]. \(\mathcal{D}_{t}^{\alpha}\) denotes either Caputo derivative or Riemann–Liouville derivative of order α. (If one denotes the Riemann–Liouville derivative, the additional condition \(\mathcal{D}_{t}^{\alpha-1}x_{k} (0)=x(0)\) is needed.)
In this paper, the following high-order \(\mathcal{D}^{\alpha}\)-type ILC updating law is considered:
where

and t∈[0,T],0<α<1, e k (t)=y d (t)−y k (t) denotes the tracking error, Γ, Λ i and Λ are unknown gain matrices to be determined.
For fractional-order nonlinear time-delay system (1) under the \(\mathcal{D}^{\alpha}\)-type ILC updating law (2), we have the following Lemmas.
Lemma 3.1
Let Δu k (t):=u k (t)−u k−1(t),Δx k (t):=x k (t)−x k−1(t), Δf k (t):=f k (⋅)−f k−1(⋅) and

then

Proof
It follows from (2) that, for k≥N,
Noting that \(\sum_{i=1}^{N} \varLambda_{i}= I-\varLambda\), it can easily be shown that

Since e k+1(t)−e k (t)=−(y k+1(t)−y k (t)), then, from (1), one has

Taking into account (5), it yields

Therefore, from (5) and (7), one gets

The proof is complete. □
Lemma 3.2
Denote that b:=∥B∥,c:=∥C∥, and \(M_{1}:= e^{\frac{a T^{\alpha}+a_{1}[(T-\tau)^{\alpha}+\tau^{\alpha}]}{\varGamma(\alpha+1)}}\), M 2:=(∥Γ∥+∥Λ−I∥), \(h:= (\frac{a+a_{1}e^{-\lambda \tau}}{\lambda^{\alpha}} )bcM_{1}\), then

Proof
It follows the definition of F k (t) that

On the other hand, from Lemma 2.1 and in accordance with the property of the fractional-order 0<α<1, we have

Therefore, if t∈[0,τ], then

If t∈[τ,T], then

After combining (12) and (13), it yields, for any t∈[0,T],

Noting that
it follows from the Property 2.1 that, for λ>0,
Therefore,

is an increasing function. Setting

it can be proved that, for all t∈[0,T],

Taking into account (15) and applying Lemma 2.2 to (14), one obtains

and

From (10), (16) and (17), it yields

Multiplying both sides of (18) by e −λt and taking the λ-norm, one has

Note that

and

From (19)–(21), it yields, for any t∈[0,T],

Moreover, it follows from (5) that

As a result, one obtains from (22) and (23) that

Applying the (λ,ξ)-norm to (24) yields (9), which completes the proof. □
Theorem 3.1
For the fractional-order nonlinear time-delay system (1) and a given reference y d (t), suppose that y d (0)=y k (0) and


where ρ{G(t)} is the spectral radius of G, \(\bar{\rho}\) is a constant, then, for all t∈[0,T], and arbitrary initial input satisfying u −i (t)=0,i=1,2,…,N, the high-order \(\mathcal{D}^{\alpha}\)-type ILC updating law (2) guarantees that {u k (t)} is uniformly convergent, and
Proof
It follows from (3) that, for k>N,
Therefore, for k>N,

Noting that \(0\leq\bar{\rho}<1\) and c 1<1 by assumption, there exist a constant ξ>1 and a sufficiently large λ such that \(\bar{\rho}\xi<1\), and
where \(c_{2}= \sum_{j=1}^{N} \|\varLambda_{j}\|\), M 2 and h as defined in Lemma 3.2.
For the above λ and ξ, multiplying both sides of (29) by e −λt ξ k and taking the (λ,ξ)-norm, it yields

Now, it follows from (9) that (31) gives

Therefore,

Hence,

Note that

Consequently, one obtains from (34) and (35)

where \(r= \frac{\rho^{-N} e^{\lambda T} }{1-\hat{h}}\|Q_{N}(t)\|_{\lambda}\). It follows from ξ>1 and (36) that

Therefore, for all t∈[0,T], we have

Furthermore, it follows from the initial conditions that {u k (t)} is uniformly robust convergent, and lim k→∞ y k (t)=y d (t). The proof is complete. □
Corollary 3.1
For fractional-order linear time-delay system
where k∈{0,1,2,…},t∈[0,T],α∈(0,1), and a given reference y d (t), suppose that y d (0)=y k (0) and \(\rho\{G(t)\}\leq\bar{ \rho}<1\), then, for all t∈[0,T], and arbitrary initial input satisfying u −1(t)=u 0(t), the second-order \(\mathcal{D}^{\alpha}\)-type ILC updating law
guarantees that {u k (t)} is uniformly convergent, and lim k→∞ y k (t)=y d (t).
Corollary 3.2
For the fractional-order linear system
and a given reference y d (t), suppose that y d (0)=y k (0) and
then, for all t∈[0,T], and arbitrary initial input satisfying u 0(t), \(\mathcal{D}^{\alpha}\)-type ILC updating law
guarantees that {u k (t)} is uniformly convergent, and lim k→∞ y k (t)=y d (t).
Remark 3.1
Note that the convergence analysis of ILC updating law (43) for fractional-order linear system (41) has been investigated in [4], in which the convergence condition is
Since ρ(I−(CB+D)Λ)≤∥I−(CB+D)Λ∥, the convergence condition (42) is less conservative than the condition (44).
4 Numerical Example
Consider the fractional-order linear time-delay system (39) with the Caputo derivative (fractional order α=0.85),
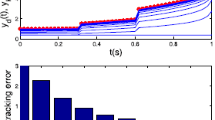
t∈[0,1],τ=0.5 and ψ(t)=[0 1]T,−0.5≤t<0. Let the reference and external disturbance be
respectively. We apply the second-order \(\mathcal{D}^{\alpha}\)-type ILC updating law
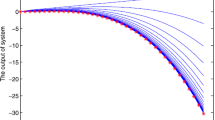
with the initial control be u −1(t)=u 0(t)=0. In this case, it can be calculated that ρ(G)=0.3702<1. The simulation results are shown in Figs. 1, 2, and 3. Figures 1 and 2 show the system output y k (t) (solid) of the first five iterations and the referenced trajectory y d (t) (dotted), while Fig. 3 shows the 2-norm of the tracking errors in the first eight iterations. It can be seen that the output is capable of approaching the desired trajectory accurately within few iterations.

The tracking performance of the system output (\(y^{k}_{1}(t)\): solid, \(y_{1}^{d}(t)\): dotted)

The tracking performance of the system output (\(y^{k}_{2}(t)\): solid, \(y_{2}^{d}(t)\): dotted)

The 2-norm of the tracking errors in each iteration
5 Concluding Remarks
In this paper, a high-order \(\mathcal{D}^{\alpha}\)-type ILC scheme for fractional-order nonlinear time-delay systems was investigated. By using the generalized Gronwall–Bellman Lemma, the convergence condition was derived. The validity of the proposed method was verified by a numerical example.
References
Podlubny, I.: Fractional Differential Equations, pp. 12–18. Academic Press, New York (1999)
Hilfer, R.: Application of Fractional Calculus in Physics, pp. 22–24. World Scientific, Singapore (2000)
Monje, C.A., Chen, Y.Q., Vinagre, B.M., Xue, D.: Fractional-Order Systems and Controls: Fundamentals and Applications, pp. 431–438. Springer, New York (2010)
Li, Y., Chen, Y.Q., Ahn, H.S.: Fractional-order iterative learning control for fractional-order linear systems. Asian J. Control 13(1), 54–63 (2011)
Luo, Y., Chen, Y.Q.: Fractional order [proportional derivative] controller for a class of fractional order systems. Automatica 45, 2446–2450 (2009)
Krishna, B.T.: Studies on fractional order differentiators and integrators: a survey. Signal Process. 91, 386–426 (2011)
Lan, Y.H., Huang, H.X., Zhou, Y.: Observer-based robust control of 0≤α<1 fractional-order uncertain systems: a linear matrix inequality approach. IET Control Theory Appl. 6, 229–234 (2012)
Xu, J.X., Tan, Y.: Linear and Nonlinear Iterative Learning Control, pp. 47–51. Springer, Berlin (2003)
Ahn, H.S., Moore, K.L., Chen, Y.Q.: Iterative Learning Control: Robustness and Monotonic Convergence for Interval Systems, pp. 38–48. Springer, London (2007)
Hoelzle, D.J., Alleyne, A.G., Johnson, A.: Basis task approach to iterative learning control with applications to micro/robotic deposition. IEEE Trans. Control Syst. Technol. 19(5), 1138–1148 (2011)
Ruan, X., Bien, Z.Z., Wang, Q.: Convergence characteristics of proportional-type iterative learning control in the sense of Lebesgue norm. IET Control Theory Appl. 6, 707–714 (2012)
Chen, Y.Q., Moore, K.L.: On D α-type iterative learning control. In: Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, Florida, USA, pp. 32–37 (2001)
Lazarevic, M.P.: PD α-type iterative learning control for fractional LTI system. In: Proceedings of the 16th International Congress of Chemical and Process Engineering, Prague, Czech Republic, pp. 271–275 (2004)
Li, Y., Ahn, H.-S., Chen, Y.Q.: Iterative learning control of a class of fractional order nonlinear systems. In: 2010 IEEE International Symposium on Intelligent Control, Yokohama, Japan, pp. 779–783 (2010)
Sun, M., Wang, D., Wang, Y.: Varying-order iterative learning control against perturbed initial conditions. J. Franklin Inst. 347, 1526–1549 (2010)
Luo, Y., Chen, Y.Q., Pi, Y.G.: Dynamic high order periodic adaptive learning compensator for cogging effect in permanent magnet synchronous motor servo system. IET Control Theory Appl. 5, 669–680 (2011)
Diethelm, K., Ford, N.J.: Analysis of fractional differential equations. J. Math. Anal. Appl. 265, 229–248 (2002)
Deng, W.H.: Smoothness and stability of the solutions for nonlinear fractional differential equations. Nonlinear Anal. 72, 1768–1777 (2010)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of P.R. China (61104072, 10971173).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lan, YH., Zhou, Y. High-Order \(\mathcal{D}^{\alpha}\)-Type Iterative Learning Control for Fractional-Order Nonlinear Time-Delay Systems. J Optim Theory Appl 156, 153–166 (2013). https://doi.org/10.1007/s10957-012-0231-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-012-0231-2