
Abstract
In this paper, an innovative and effective numerical algorithm by the use of weak Galerkin (WG) finite element methods is proposed for a type of fourth order problem arising from fluorescence tomography. Fluorescence tomography is emerging as an in vivo non-invasive 3D imaging technique reconstructing images that characterize the distribution of molecules tagged by fluorophores. Weak second order elliptic operator and its discrete version are introduced for a class of discontinuous functions defined on a finite element partition of the domain consisting of general polygons or polyhedra. An error estimate of optimal order is derived in an \(H^2_{\kappa }\)-equivalent norm for the WG finite element solutions. Error estimates of optimal order except the lowest order finite element in the usual \(L^2\) norm are established for the WG finite element approximations. Numerical tests are presented to demonstrate the accuracy and efficiency of the theory established for the WG numerical algorithm.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we are concerned with the efficient numerical methods for a type of fourth order problem with Dirichlet and Neumann boundary conditions. The model problem seeks an unknown function \(u=u(x)\) satisfying
where \(\Omega \) is an open bounded domain in \({\mathbb {R}}^d\)(\(d=2,3\)) with a Lipschitz continuous boundary \(\partial \Omega \), \({{\mathbf {n}}}\) is the unit outward normal direction to \(\partial \Omega \), \(\kappa \) is a symmetric and positive definite matrix-valued function, \(\mu \) is a nonnegative real-valued function, and the functions f, \(\xi \), and \(\nu \) are given in the domain or on its boundary, as appropriate. For convenience, denote the second order elliptic operator \(\nabla \cdot (\kappa \nabla )\) as E. For simplicity and without loss of generality, we assume that \(\kappa \) is a piecewise constant matrix and \(\mu \) is a non-negative constant.
The fourth order model problem (1.1) arises from fluorescence tomograph(FT) [5, 8, 10, 13, 17, 28, 29, 31], which emerges as an in vivo noninvasive 3D imaging modality. FT captures the specific information of molecules by the use of highly specific fluorescent probes and nonionizing NIR radiation instead of X-ray or other powerful magnetic fields [12]. Thus, FT is considered to be a potentially less harmful medical imaging modality compared to other medical imaging modalities, such as CT and MRI. The aim of FT is to reconstruct the distribution of fluorophores tagged with targetted molecules from the information of the boundary measurements. Therefore, FT has been regarded as a promising and feasible method in the early detection of cancer and the monitoring of drug nowadays [2, 11, 30].
Introduce the following space
which is equipped with the following norm
A variational formulation for the fourth order model problem (1.1) is given by seeking \(u\in H_{\kappa }^2(\Omega )\) satisfying \(u|_{\partial \Omega }=\xi \in H^{\frac{1}{2}}(\partial \Omega )\), \(\kappa \nabla u\cdot \mathbf{n }|_{\partial \Omega } =\nu \in H^{-\frac{1}{2}}(\partial \Omega )\), such that
where \((\cdot ,\cdot )\) stands for the usual inner product in \(L^2(\Omega )\), and the test space \({{{\mathcal {V}}}}\) is defined as
The conforming finite element methods have been proposed for a general fourth order elliptic problem, such as the biharmonic equation, by the use of the subspaces of \(H^2(\Omega )\) as the finite element spaces. The \(H^2\)-conforming finite element methods make use of the \(C^1\)-continuity for the corresponding piecewise polynomials on a prescribed finite element partition [3]. The \(C^1\)-continuity leads to an enormous difficulty and complexity in constructing the corresponding finite element functions due to the high degrees of freedom of the \(C^1\)-continuous elements in practical computations. For example, the Argyris element has 21 degrees of freedom, and the Bell element has 18 degrees of freedom. Thus, \(H^2\)-conforming finite element methods are not popular in solving the biharmonic equation in practice. Nonconforming as well as discontinuous Galerkin finite element methods have been developed as the alternative numerical approaches for solving the biharmonic equation over the last several decades. One of the well-known nonconforming finite elements for solving the biharmonic equation is the Morley element [19] which uses piecewise quadratic polynomials. Recently, a \(C^0\) interior penalty method has been proposed in [4, 6]. A hp-version interior-penalty discontinuous Galerkin method was proposed for the biharmonic equation in [20]. The mixed methods have been developed for the biharmonic equation to avoid the use of \(C^1\)-elements by reducing the fourth order problem to a system of two second order equations [1, 7, 9, 14, 18].
The difference between (1.2) and the standard bi-harmonic equation is significant. First, the usual \(H^2\) conforming elements designed for the bi-harmonic equation are no longer \(H_\kappa ^2\)-conforming, and thus are not applicable to the problem (1.2). For some well-known non-conforming finite elements, such as the Morley element [19], for the biharmonic equation, the corresponding variational formulation involves the full Hessian. Since it is not clear if the problem (1.2) can be re-formulated in a Hessian-like equivalent form, the applicability of such non-conforming finite elements is highly questionable, if not impossible. In fact, we believe that they can not be directly applied to the problem (1.2). The problem (1.2) can also be formulated in a mixed form by using an auxiliary variable \(w=-\nabla \cdot ( \kappa \nabla u)+\mu u\). The exact mixed formulation seeks \(u, w \in H^1(\Omega )\) such that \(u|_{\partial \Omega } = \xi \) and satisfying
Most of the existing finite element methods are applicable to the mixed formulation (1.3). One drawback with the mixed formulation is the saddle-point nature of the problem, which causes extra difficulty in the design of fast solution techniques for the corresponding discretizations.
Recently, weak Galerkin (WG) finite element method is emerging as a new and efficient numerical method for solving partial differential equations, which was first proposed in 2011 by Junping Wang and Xiu Ye for solving second order elliptic problem in [25], and was further developed in solving many other PDEs [16, 21,22,23,24, 26, 27]. The central idea of WG is to interpret partial differential operators as generalized distributions, called weak differential operators, over the space of discontinuous functions including boundary information. The weak differential operators are further discretized and applied to the corresponding variational formulations of the underlying PDEs. In order to overcome the barrier in constructing “smooth” finite element functions, WG makes use of the generalized and/or discontinuous approximating functions on general meshes. The current research indicates that the concept of discrete weak differential operators offers a new paradigm in numerical methods for partial differential equations.
The proposed WG finite element algorithm for the fourth order problem (1.1) is based on two new ideas: (1) the computation of a discrete weak second order elliptic operator locally on each element that takes into account the coefficient matrix from applications; and (2) a stabilizer that takes into account the jump of the coefficient matrix from applications. In addition, our weak Galerkin finite element method is based on the variational formulation (1.2) which proves to be convergent in optimal order. The result is innovative in that the proposed algorithm is the first ever finite element method for the primal variable that works for the fourth order problem (1.1).
The design of WG algorithms for the fourth order problem (1.1) is not as easy as it appears. Different formulations for (1.1) may lead to numerical solutions that are not stable with respect to the parameters in the modeling equation. For example, a more straightforward variational formulation than (1.2) for the fourth order problem (1.1) would seek \(u\in H_{\kappa }^2(\Omega )\) satisfying \(u|_{\partial \Omega }=\xi \) and \(\kappa \nabla u\cdot \mathbf{n }|_{\partial \Omega } =\nu \) such that
where \(F= -\nabla \cdot (\kappa \nabla )+\mu I\). A naive weak Galerkin finite element method could be designed by introducing a discrete weak version for the second order elliptic operator F. However, according to our numerical experiments, this naive weak Galerkin method based on the variational formulation (1.4) does not provide reliable numerical approximations for (1.1), particularly when the parameter \(\mu \) becomes large. Although it is unclear what the causes are for the observed numerical instability, it is clear that the formulation (1.4) does not have a good handling on the second order elliptic term which is believed to play an important role in the algorithm design. On the theoretical side, the missing of the second order term leads to the fact that the convergence analysis for the corresponding WG method cannot pass through based on the variational formulation (1.4).
We briefly introduce the organization of this paper. Section 2 is devoted to a discussion of weak second order elliptic operator, and weak gradient as well as their discrete versions. In Sect. 3, a weak Galerkin algorithm is proposed for solving the fourth order model problem (1.1) arising from FT based on the variational formulation (1.2). In Sect. 4, some approximation properties are derived for the local \(L^2\) projection operators which play a critical role in the convergence analysis. Section 5 aims to derive an error equation for the WG finite element approximation. In Sect. 6, some error estimates are established for the WG finite element approximation in a \(H_{\kappa }^2\)-equivalent discrete norm and the usual \(L^2\)-norm. In Sect. 7, some numerical results are presented to verify the effectiveness of the theory established in the previous sections.
2 Weak Derivatives and Discrete Weak Derivatives
The principle differential operators in the variational form (1.2) of the fourth order model problem (1.1) are the second order elliptic operator E and the usual gradient operator. Thus, we shall define the weak second order elliptic operator and review the definition for the weak gradient operator introduced in [26]. For the purpose of numerical implementation, we shall also introduce a discrete version for the weak second order elliptic operator and review the discrete weak gradient operator as discussed in [26].
Let \({{{\mathcal {T}}}}_h\) be a partition of the domain \(\Omega \) into polygons in 2D or polyhedra in 3D which is shape regular as defined in [26]. Denote by \({{\mathcal {E}}}_h\) the set of all edges or flat faces in \({{{\mathcal {T}}}}_h\), and let \({{\mathcal {E}}}_h^0={{\mathcal {E}}}_h\setminus \partial \Omega \) be the set of all interior edges or flat faces in \({{{\mathcal {T}}}}_h\). By a weak function on the region T, we mean a function \(v=\{v_0,v_b,v_g\}\) such that \(v_0\in L^2(T)\), \(v_b\in L^{2}(\partial T)\) and \(v_g\in L^{2}(\partial T)\). The first and second components \(v_0\) and \(v_b\) are used to represent the value of v in the interior and on the boundary of T. The third component \(v_g \) is reserved to represent the normal derivative \(\kappa \nabla v \cdot \mathbf{n }\) on the boundary of T, where \(\mathbf{n }\) stands for the unit outward normal direction on the boundary of T. On each interior edge or flat face \(e\in {{{\mathcal {E}}}}_h^0\) shared by two elements \(T_L\) and \(T_R\), \(v_g\) has two copies of value: one as seen from the left-hand side element \(T_L\) denoted by \(v_g^L\), and the other as seen from the right-hand side element \(T_R\) denoted by \(v_g^R\). It is clear that \(v_g^L + v_g^R = 0\).
Denote by W(T) the space of all weak functions on the element \(T\in {{{\mathcal {T}}}}_h\); i.e.,
Definition 2.1
For any weak function \(v\in W(T)\), the action of the second order elliptic operator E on \(v=\{v_0,v_b,v_g \}\), denoted by \(E_{ w} v\), is defined as a linear functional in \(H^2(T)\) whose action on each \(\varphi \in H^2(T)\) is given by
Here, \(\langle \cdot ,\cdot \rangle _{\partial T}\) stands for the usual inner product in \(L^2(\partial T)\).
For computational purpose, we introduce a discrete version of the weak second order elliptic operator by approximating \(E_{ w}\) in a polynomial subspace of the dual of \(H^2(T)\). To this end, for any non-negative integer \(r\ge 0\), denote by \(P_r(T)\) the set of polynomials on T with degree no more than r. A discrete weak second order elliptic operator, denoted by \(E_{ w,r,T}\), is defined as the unique polynomial \(E_{ w,r,T} v\in P_r(T)\) satisfying the following equation
For sufficiently smooth \(v_0\in H^2(T)\), we have from the usual integration by parts that
for all \(\varphi \in P_r(T)\).
Definition 2.2
[26] The weak gradient of any \(v\in W(T)\), denoted by \( \nabla _{ w} v\), is defined as a linear vector functional in the dual of \([H^1(T)]^d\) whose action on each \(\varvec{ \psi } \in [H^1(T)]^d\) is given by
The discrete weak gradient operator in \([P_r(T)]^d\), denoted by \(\nabla _{ w,r,T}\), is given as the unique vector polynomial \( \nabla _{ w,r,T} v\in [P_r(T)]^d\) satisfying the following equation
For \(v_0\in H^1(T)\), we have from the usual integration by parts that
3 Weak Galerkin Finite Element Methods
Let \(k\ge 2\). Denote by \(W_k(T)\) the local discrete weak function space; i.e.,
Patching \(W_k(T)\) over all the elements \(T\in {{{\mathcal {T}}}}_h\) through the interior interface \({{\mathcal {E}}}_h^0\) gives rise to a global weak finite element space, denoted by \(V_h\); i.e.,
Note that \(v_b\) is single-valued on each interior edge \(e\in {{\mathcal {E}}}_h^0\), and \(v_g\) has two values \(v_g^L\) and \(v_g^R\) on each \(e\in {{\mathcal {E}}}_h^0\) satisfying \(v_g^L + v_g^R=0\).
Denote by \(V_h^0\) the subspace of \(V_h\) with vanishing values on the boundary \(\partial \Omega \); i.e.,
Denote by \(E_{w,k-2}\) and \( \nabla _{w,k-1}\) the discrete weak second order elliptic operator and the discrete weak gradient operator on the weak finite element space \(V_h\) computed by using (2.2) and (2.5) on each element \(T\in {{{\mathcal {T}}}}_h\) for \(k\ge 2\), respectively; i.e.,
For simplicity, the subscripts \(k-2\) and \(k-1\) will be dropped from the notations \(E_{w,k-2}\) and \(\nabla _{w,k-1}\), respectively. For any \(u=\{u_0,u_b, u_g\}\) and \(v=\{v_0,v_b, v_g\}\) in \(V_h\), we introduce the following two bilinear forms
and a stabilizer
For each element T, denote by \(Q_0\) the \(L^2\) projection onto \(P_{k}(T)\). For each edge or face \(e\subset \partial T\), denote by \(Q_{b}\) and \(Q_{g}\) the \(L^2\) projections onto \(P_{k}(e)\) and \(P_{k-1}(e)\), respectively. Let \(H^2({{\mathcal {T}}}_h)\) be the space of \(H^2\) -functions subordinated to the finite element partition \({{\mathcal {T}}}_h\); i.e.,
Now, for any \(u\in H^2_\kappa (\Omega )\cap H^2({{\mathcal {T}}}_h)\), we can define a projection onto the weak finite element space \(V_h\) such that on each element T,
Weak Galerkin Algorithm 1. Find \(u_h=\{u_0,u_b, u_g\}\in V_h\) satisfying \(u_b=Q_{b}\xi \) and \(u_g =Q_{g}\nu \) on \(\partial \Omega \), such that
Lemma 3.1
For any \(v\in V_h^0\), define \({|||}v{|||}\) by
Then, \({|||}\cdot {|||}\) defines a norm in the linear space \(V_h^0\).
Proof
It is easily seen that \({|||}v{|||}\) defines a semi norm in the finite element space \(V_h^0\) when we write the term \(2\mu (\kappa \nabla _w v,\nabla _w v)_h\) as \(2\mu (\kappa ^{\frac{1}{2}} \nabla _w v,\kappa ^{\frac{1}{2}}\nabla _w v)_h\). We shall only verify the positivity property for \({|||}\cdot {|||}\). To this end, assume that \({|||}v{|||}=0\) for some \(v\in V_h^0\). It follows from (3.3) and the assumption \(\mu \ge 0\) that \(E_{w}v=0\) on each element T, \( \kappa \nabla v_0 \cdot \mathbf{n }= v_g\) and \( v_0=v_b\) on each \(\partial T\). Thus, for any \(\varphi \in P_{k-2}(T)\), from (2.3), we obtain
which implies that \(E v_0 =0\) on each element T. Thus, from integration by parts, we obtain
where we have used the fact that the sum for the terms related to \(v_g \) vanishes (note that \(v_g\) vanishes on \(\partial T\cap \partial \Omega \)). This implies that \(\nabla v_0=0\) on each element T. Thus, \(v_0\) is a constant on each element T, which, together with the fact that \( v_0=v_b\) on each \(\partial T\), indicates that \(v_0\) is continuous over the whole domain \(\Omega \). Thus, we obtain that \(v_0=C\) in \(\Omega \). Together with the facts that \( v_0=v_b\) on \(\partial T\) and \(v_b|_{\partial T\cap \partial \Omega }=0\), we obtain \(v_0=0\) in \(\Omega \), which, combining with the facts that \( v_0=v_b\) on each \(\partial T\) and \(v_b|_{\partial T\cap \partial \Omega }=0\) indicates that \(v_b=0\) in \(\Omega \). Furthermore, the facts that \( \kappa \nabla v_0 \cdot \mathbf{n }= v_g\) on each \(\partial T\) and \(v_g|_{\partial T\cap \partial \Omega }=0\) yield \(v_g=0\) in \(\Omega \). Thus, \(v=0\) in \(\Omega \). This completes the proof. \(\square \)
Lemma 3.2
The weak Galerkin algorithm (3.2) has a unique solution.
Proof
The proof is similar to the proof of Lemma 4.2 in [21], and therefore the details are omitted here. \(\square \)
4 \(L^2\) Projections
In this section, we aim to establish several valuable properties for the \(L^2\) projections, which will play an important role in the error analysis of the weak Galerkin scheme (3.2).
Lemma 4.1
For each element \(T\in {{{\mathcal {T}}}}_h\), define \(\mathcal{Q}_h\) the local \(L^2\) projection onto \(P_{k-2}(T)\) and \(\mathcal{Q}_{1}\) the local \(L^2\) projection onto \(P_{k-1}(T)\). The \(L^2\) projections \(Q_h\), \({{{\mathcal {Q}}}}_{1}\) and \({{{\mathcal {Q}}}}_h\) satisfy the following commutative properties:
Proof
To derive (4.1), for any \(\varphi \in P_{k-2}(T)\) and \(w\in H_\kappa ^2(T)\), it follows from the definition (2.2) of \(E_{ w}\) and the usual integration by parts that
Similarly, (4.2) can be derived by the definition (2.5) of \( \nabla _{ w}\) and the usual integration. This ends the proof. \(\square \)
For any element \(T\in {{\mathcal {T}}}_h\), denote by \(\varphi \) a regular function in \(H^1(T)\). The trace inequality holds true [26]:
If \(\varphi \) is a polynomial on the element T, it follows from the inverse inequality that [26]
Remark 4.1
Note that the trace inequality (4.3) is employed for regular functions on each element \(T\in {{{\mathcal {T}}}}_h\) thoughout the paper. Therefore, there is no need to establish the corresponding trace inequality with regard to the whole domain in the Sobolev space \(H_{\kappa }^2(\Omega )\).
Lemma 4.2
[15, 26] Let \({{{\mathcal {T}}}}_h\) be a finite element partition of \(\Omega \) which satisfies the shape regularity assumption defined in [26]. For any \(0\le s\le 2\), the following estimates hold true:
Lemma 4.3
Assume \(u\in H^{\max \{m+1,4\}}(\Omega )\). Denote by \(\delta _{i,j}\) the Kronecker’s delta which takes value 1 for \(i=j\) and takes value 0 otherwise. The following estimates hold true:
Proof
To prove (4.8), it follows from the trace inequality (4.3) and the estimate (4.6) that
Similarly, using the trace inequality (4.3) and the estimates (4.5)- - (4.7) complete the proof of (4.9) - (4.12). \(\square \)
5 Error Equations
Let u and \(u_h=\{u_0,u_b, u_g\} \in V_h\) be the solutions of (1.1) and its finite element discretization scheme (3.2), respectively. Assume that the exact solution is \(H^2\)-regular on each element T; i.e., \(u\in H_\kappa ^2(\Omega )\cap H^2({{\mathcal {T}}}_h)\). Denote by
the error function between the \(L^2\) projection of the exact solution u and its weak Galerkin finite element approximation \(u_h\). By error equation we mean an equation for which the error function \(e_h\) must satisfy. Error equations are usually employed in the derivation of error estimates for finite element solutions. The goal of this section is to derive an error equation for the error function \(e_h\) arising from the weak Galerkin finite element scheme (3.2).
Lemma 5.1
The error function \(e_h \in V_h^0\) defined in (5.1) satisfies
where
Proof
Letting \(\varphi =E_w(Q_h u )\) in (2.3), from (4.1), we obtain
which implies that
Next, it follows from the integration by parts that
Letting \(\varvec{\psi }=\nabla _w(Q_hu)\) in (2.6), from (4.2) and the integration by parts, we have
where we have used the fact that the sum for the terms related to \(v_{b}\) vanishes (note that \(v_{b}\) vanishes on \(\partial T\cap \partial \Omega \)).
From the definition of the projection, we get
Adding (5.5)–(5.7) together and using the identity that
we obtain
where we have used the fact that the sum for the terms related to \(v_{b}\) and \(v_g \) vanishes (note that both \(v_{b}\) and \(v_g\) vanish on \(\partial T\cap \partial \Omega \)). Combining the above equation with (5.4) and adding \(s(Q_hu,v)\) to both sides of the equation yield
which, by subtracting (3.2), yields the error equation (5.2). This completes the proof. \(\square \)
6 Error Estimates in \(H^2_\kappa \) and \(L^2\)
This section is concerned with the error estimates for the finite element approximation \(u_h\) of the weak Galerkin algorithm (3.2) in both the \(H^2_\kappa \) -equivalent norm and the usual \(L^2\) norm.
Theorem 6.1
Assume \(k\ge 2\) and the exact solution u of (1.1) is sufficiently regular satisfying \(u\in H^{\max \{k+1,4\}}(\Omega )\). Let \(u_h\) be the weak Galerkin finite element approximation arising from (3.2). There exists a constant C such that
Proof
Letting \(v=e_h\) in the error equation (5.2) gives rise to
We estimate the terms on the right-hand side of (6.2) as follows. As to the first term, using the Cauchy-Schwarz inequality and the estimate (4.9) gives
Similarly, using the Cauchy-Schwarz inequality and the estimates (4.8), (4.10)- (4.12) yields
Combining all the above five estimates with (6.2), one arrives at
which completes the proof of the theorem. \(\square \)
The rest of this section aims to derive some \(L^2\)-error estimates for the components \(e_0\), \(e_b\) and \(e_g\) of the error function \(e_h\) by using the usual duality argument. We consider the dual problem: Find \(\psi \in H_\kappa ^2(\Omega )\) satisfying
Assume the dual problem (6.3) has the \(H^4\)-regularity estimate; i.e.,
which holds true when the domain is convex and the coefficient \(\kappa \) is sufficiently smooth.
Theorem 6.2
Assume \(k\ge 2\). Let \(t_0=\min \{k,3\}\). Assume that the exact solution of (1.1) is sufficiently regular satisfying \(u\in H^{\max \{k+1,4\}}(\Omega )\), and the dual problem (6.3) has the \(H^4\)-regularity estimate (6.4). Let \(u_h\) be the weak Galerkin finite element solution arising from (3.2). There exists a constant C such that
In other words, we arrive at a sub-optimal order of convergence for the lowest order \(k=2\) and optimal order of convergence for \(k\ge 3\).
Proof
Testing the first equation of (6.3) against \(e_0\) for each element \(T\in {{{\mathcal {T}}}}_h\), it follows from the usual integration by parts that
where we used that the added terms related to \(e_b\) and \(e_{g}\) vanish because of the cancelation for interior edges as well as the fact that \(e_b\) and \(e_{g}\) vanish on \(\partial \Omega \). Replacing u and v in (5.4) with \(\psi \) and \(e_h\) respectively gives rise to
Letting \(v=Q_h\psi \) in the error equation (5.2) gives
Substituting (6.7) into (6.6) and letting \(\varvec{\psi }=\nabla _w Q_h\psi \) in (2.5), it follows from (4.2) that
where we have used the third equation of (6.3) to obtain
The terms on the right-hand side of (6.8) can be bounded as follows. Note that \(t_0=\min \{3,k\}\le 3\). As to the first term on the right-hand side of (6.8), it follows from the Cauchy-Schwarz inequality, (6.4), the estimates (4.5) and (4.7) that
Similarly, from the Cauchy-Schwarz inequality and the estimates (4.8) - (4.12), it is easy to arrive at
Substituting all the above estimates into (6.8) gives rise to
which, together with the regularity estimate (6.4) and (6.1), gives rise to the desired \(L^2\) error estimate (6.5). This completes the proof of the theorem. \(\square \)
Theorem 6.3
For \(v=\{v_0, v_b, v_g\}\in V_h\), define
Under the same assumptions of Theorem 6.2, there exists a constant C such that
Proof
Recall that \(e_b=Q_bu-u_b\) on each element boundary \(\partial T\). It follows that
Using the trace inequality (4.4) we have
which, by summing over all the elements in \({{\mathcal {T}}}_h\), leads to
Now, substituting the error estimates (6.1) and (6.5) into the above inequality gives rise to the desired estimate (6.10). This completes the proof. \(\square \)
Theorem 6.4
For \(v=\{v_0, v_b, v_g\}\in V_h\), define
Under the same assumptions of Theorem 6.2, there exists a constant C such that
Proof
The same technique used in Theorem 6.3 can be applied to the proof of this theorem, and the details are omitted here. \(\square \)

WG finite element solutions with meshsize 1 / 64: (left) for the exact solution \(u=x^2(1-x)^2y^2(1-y)^2\), (right) for the exact solution \(u=\sin (\pi x)\sin (\pi y)\)
7 Numerical Tests
In this section, some numerical tests are implemented in order to demonstrate the effectiveness of the weak Galerkin algorithm (3.2) for solving the fourth order model problem (1.1) arising from FT. For simplicity, the weak finite element functions \(v=\{v_0,v_b,v_g\}\) are chosen as polynomials of degree k, \(k-1\) and \(k-1\), respectively. It should be pointed out that the corresponding finite element scheme can be analyzed without any difficulty by following the approaches presented in previous sections with some necessary modifications as demonstrated in [32] for a different fourth order problem. Details are omitted here due to the length of presentation.

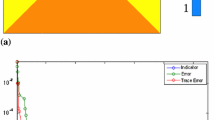
WG finite element solutions with discontinuous coefficients with mesh size 1/64. Left with piecewise continuous boundary condition. Right with Dirac-delta function as the boundary condition

WG finite element solution for a test case with source point (13.3065, 0.0730994) (left) and source point (49.8272, 13.5234) (right) with meshsize 1 / 64
In our numerical experiments, we implement the lowest order (i.e., \(k=2\)) element for the weak Galerkin algorithm (3.2). The weak finite element space used in our implementation is as follows:
For \(v=\{v_0,v_b,v_g\}\in V_{h,2}\), the discrete weak second order elliptic operator \(E_{ w} v\) is discretized as a constant locally on each element T satisfying
for all \(\varphi \in P_0(T)\), which is simplified as
Table 1 shows the numerical results for the exact solution \(u=x^2(1-x)^2y^2(1-y)^2\) implemented on the unit square domain \(\Omega =(0,1)^2\). This test case has homogeneous boundary conditions for both Dirichlet and Neumann. We take the coefficient matrix \(\kappa =[1/(3 (1+0.01)),0;0,1/(3 (1+0.01))]\) and \(\mu =0.01\) in the whole domain \(\Omega \). The WG finite element scheme (3.2) was implemented on uniform triangular partitions, which were obtained by partitioning the domain into \(n\times n\) sub-squares and then dividing each square element into two triangles by the diagonal line with a negative slope. The mesh size is denoted by \(h=1/n\).
The numerical results indicate that the convergence rate for the solution of the weak Galerkin algorithm (3.2) is of order O(h) in the discrete \(H^2_{\kappa }\) norm, and is of order \(O(h^2)\) in the standard \(L^2\) norm. The numerical results are in great consistency with theory for the \(H^2_{\kappa }\) and \(L^2\) norms of the error. Figure 1 (left figure) illustrates the WG numerical solution for the meshsize 1 / 64, which totals to 4096 elements.
Table 2 presents the numerical results when the exact solution is given by \(u=\sin (\pi x)\sin (\pi y)\) on the unit square domain \(\Omega =(0,1)^2\), which corresponds to a nonhomogeneous Neumann boundary value. The coefficient matrix \(\kappa \) and the constant \(\mu \) are taken to be the same values as in the previous test. It shows that the convergence rates for the solution of the weak Galerkin algorithm (3.2) in the \(H^2_{\kappa }\) and \(L^2\) norms are of order O(h) and \(O(h^2)\), respectively, which are in consistency with theory for the \(L^2\) and \(H^2_{\kappa }\) norms of the error. Figure 1 (right figure) gives the WG numerical solution for the meshsize 1 / 64.
In the rest of this section, we shall conduct three different types of numerical tests arising from the FT model. Firstly, we take \(\kappa =[1,0;0,1]\) in the subdomain \(\Omega _0=(1/4,3/8)^2\) and \(\kappa =[10^{-5},0;0,10^{-5}]\) in the rest of the whole domain \( \Omega =(0,1)^2\). We take \(\mu \) to be 0 in the whole domain \( \Omega \). The right-hand side f is taken to be zero. For the Dirichlet boundary condition \(u=\xi \), the boundary function \(\xi \) is taken to be 1 at the middle point on each boundary segment and 0 at corners. As to the Neumann boundary condition \(\kappa \nabla u\cdot \mathbf{n }= \nu \), we take \(\nu =- \xi \) in the test. Figure 2 (left figure) illustrates the WG finite element solution for the meshsize 1 / 64.
Secondly, we take the same configuration of \(\kappa \), \(\mu \) and f as in the previous test. The Dirichlet boundary condition \(u=\xi \) is set as an approximate Dirac-\(\delta \) function on each of the four boundary edges. More precisely, this boundary data assumes value \(\frac{1}{|e|}\) on the middle edge of each boundary segment, and takes value 0 on all the other edges. As to the Neumann boundary condition \(\kappa \nabla u\cdot \mathbf{n }= \nu \), we take \(\nu =- \xi \) in the test. Figure 2 (right figure) illustrates the WG finite element solution for the meshsize 1 / 64.
At last, we consider a real problem arising from FT model which is implemented on the domain \(\Omega =(0,50)^2\). There are two blocks in the domain \(\Omega \): one is at (25,15) with radius 4; the other is at (35,20) with radius 3. The right hand side data f is the function modeling the light source, and we use Gaussian function to model each point source \((x_0,y_0)\), with their centers locating around the boundary of the domain. More precisely, we set \(f=\sqrt{2 \pi \epsilon } e^{-\frac{(x-x_0)^2+(y-y_0)^2}{2\epsilon }}\) with \(\epsilon =100/64\). The coefficient matrix \(\kappa \) is taken to be \([1/(3 (1+0.01)),0;0,1/(3 (1+0.01))]\) and \(\mu \) is taken to be 0.01 in the whole domain \(\Omega \) which arise from the data of the real problem in FT. Figure 3 illustrate the WG finite element solution for light sources with the mesh size 1 / 64, where the coordinates of light sources are (13.3065, 0.0730994) and (49.8272, 13.5234), respectively.
8 Conclusions
Fluorescence tomography is a potentially less harmful medical imaging modality which is considered to be a promising method in the early cancer detection and drug monitoring. The weak Galerkin finite element methods are proposed and analyzed for solving a type of fourth order problem arising from fluorescence tomography. To this end, we introduce the weak second order elliptic operator as well as its discrete version based on a class of discontinuous functions defined on a finite element partition of the domain consisting of general polygons or polyhedra. An error estimate of optimal order is derived in an \(H^2_{\kappa }\)-equivalent norm for the WG finite element solutions. Furthermore, optimal order error estimates except the lowest order in the \(L^2\) norm are established for the WG finite element approximations. Applying WG to solve the forth order Eq. (1.1) is only the first step towards image reconstructions in FT, and there are much more to be investigated. For example, the algorithm studied in this paper finds the orthogonal solution for the so called orthogonal solution and kernel correction algorithms (OSKCA) proposed for FT in [5, 31]. In the near future, we plan to further extend WG to compute the kernel corrections in OSKCA, so that the entire image reconstructions in FT can be performed using the framework of WG.
References
Arnold, D., Brezzi, F.: Mixed and nonconforming finite element methods: implementation, postprocessing and error estimates. RAIRO Modl. Math. Anal. Numr. 19(1), 7–32 (1985)
Brenner, S., Ntziachristos, V., Weissleder, R.: Optical-based molecular imaging: contrast agents and potential medical applications. Eur. Radiol. 13, 231–243 (2003)
Brenner, S., Scott, L.: The Mathematical Theory of Finite Element Methods, 3rd edn. Springer, New York (2008)
Brenner, S., Sung, L.: \(C^0\) interior penalty methods for fourth order elliptic boundary value problems on polygonal domains. J. Sci. Comput. 22(1), 83–118 (2005)
Chow, S., Yin, K., Zhou, H., Behrooz, A.: Solving inverse sourse problems by the orthogonal solution and kernel correction algorithm(OSKCA) with applications in fluorescence tomography. Inverse Probl. Imaging 8, 79–102 (2014)
Engel, G., Garikipati, K., Hughes, T., Larson, M.G., Mazzei, L., Taylor, R.: Continuous/discontinuous finite element approximations of fourth order elliptic problems in structural and continuum mechanics with applications to thin beams and plates, and strain gradient elasticity. Comput. Meth. Appl. Mech. Eng. 191, 3669–3750 (2002)
Falk, R.: Approximation of the biharmonic equation by a mixed finite element method. SIAM J. Numer. Anal. 15, 556–567 (1978)
Gao, H., Zhao, H.: Analysis of a numerical solver for radiative transport equation. Math. Comput. 82(281), 153–172 (2013)
Gudi, T., Nataraj, N., Pani, A.K.: Mixed discontinuous Galerkin finite element method for the biharmonic equation. J. Sci. Comput. 37, 139–161 (2008)
Guermond, J., Kanschat. G., Ragusa, J.: Discontinuous Galerkin for the radiative transport equation. Recent developments in discontinuous Galerkin finite element methods for partial differential equations. IMA Vol. Math. Appl., vol. 157, Springer, Cham, pp. 181–193 (2014)
Hawrysz, D., Sevick-Muraca, E.: Developments toward diagnostic breast cancer imaging using near-infrared optical measurements and fluorescent contrast agents. Neoplasia (New York, NY) 2, 388–417 (2000)
Hebden, J., Arridge, S., Delpy, D.: Optical imaging in medicine: I. experimental techniques. Phys. Med. Biol. 42, 825–840 (1997)
Lehtikangas, O., Tarvainen, T., Kim, A., Arridge, S.: Finite element approximation of the radiative transport equation in a medium with piece-wise constant refractive index. J. Comput. Phys. 282, 345–359 (2015)
Mu, L., Wang, Y., Wang, J., Ye, X.: A weak Galerkin mixed finite element method for biharmonic equations. Numerical solution of Partial Differential Equations: theory, algorithms, and their applications, vol. 45. pp. 247–277 (2013). arXiv:1210.3818v2
Mu, L., Wang, J. Ye, X.: Weak Galerkin finite element methods for the biharmonic equation on polytopal meshes. Numerical methods for Partial Differential Equations, vol. 30, pp. 1003 –1029 (2014). arXiv:1303.0927v1
Mu, L., Wang, J., Ye, X.: Weak Galerkin finite element methods on polytopal meshes. International Journal of Numerical Analysis and Modeling, vol. 12, pp. 31–53 (2015). arXiv:1204.3655v2
Mohan, S., Tarvainen, T., Schweiger, M., Pulkkinen, A., Arridge, S.: Variable order spherical harmonic expansion scheme for the radiative transport equation using finite elements. J. Comput. Phys. 230(19), 7364–7383 (2011)
Monk, P.: A mixed finite element methods for the biharmonic equation. SIAM J. Numer. Anal. 24, 737–749 (1987)
Morley, L.: The triangular equilibrium element in the solution of plate bending problems. Aero. Quart. 19, 149–169 (1968)
Mozolevski, I., Sli, E., Bsing, P.: hp-Version a priori error analysis of interior penalty discontinuous Galerkin finite element approximations to the biharmonic equation. J. Sci. Comput. 30, 465–491 (2007)
Wang, C., Wang, J.: An efficient numerical scheme for the biharmonic equation by weak Galerkin finite element methods on polygonal or polyhedral meshes. Comput. Math. Appl. 68(12), 2314–2330 (2014)
Wang, C., Wang, J.: A hybridized weak Galerkin finite element method for the biharmonic equation. Int. J. Numer. Anal. Model. 12(2), 302–317 (2015). arXiv:1402.1157
Wang, C., Wang, J.: Discretization of div-curl Systems by Weak Galerkin Finite Element Methods on Polyhedral Partitions. J. Sci. Comput., Published on line Feb 8 (2016). http://springerlink.bibliotecabuap.elogim.com/article/10.1007/s10915-016-0176-y. arXiv:1501.04616
Wang, C., Wang, J., Wang, R., Zhang, R.: A locking-free weak Galerkin finite element method for elasticity problems in the primal formulation. J. Comput. Math. Appl. 31 Dec (2015). http://www.sciencedirect.com/science/article/pii/S0377042715006275. arXiv:1508.05695
Wang, J., Ye, X.: A weak Galerkin finite element method for second-order elliptic problems. J. Comp. and Appl. Math., vol. 241, pp. 103–115 (2013). arXiv:1104.2897v1
Wang, J., Ye, X.: A weak Galerkin mixed finite element method for second-order elliptic problems. Math. Comp., vol. 83, no. 289, pp. 2101–2126 (2014). arXiv:1202.3655v2
Wang, J., Ye, X.: A weak Galerkin finite element method for the Stokes equations. arXiv:1302.2707v1
Warsa, J., Benzi, M., Wareing, T., Morel, J.: Two-level Preconditioning of a Discontinuous Galerkin Method for Radiation Diffusion, Numerical Mathematics and Advanced Applications. Springer, Milan (2003)
Warsa, J., Benzi, M., Wareing, T., Morel, J.: Preconditioning a mixed discontinuous finite element method for radiation diffusion. Numer. Linear Algebra Appl. 11(8–9), 795–811 (2004)
Weissleder, R., Tung, C., Mahmood, U., Bogdanov, A.: In vivo imaging of tumors with protease-activated near-infrared fluorescent probes. Nat. Biotechnol. 17, 375–378 (1999)
Yin, K.: New Algorithms for Solving Inverse Source Problems in Imaging Techniques with Applications in Fluorescence Tomography, Ph.D. Thesis, Georgia Institute of Technology (2013)
Zhang, R., Zhang, Q.: A weak Galerkin finite element scheme for the biharmonic equations by using polynomials of reduced order. J. Sci. Comput. 64(2), 559–585 (2015)
Acknowledgements
Funding was provided by National Science Foundation (Grant Nos. DMS-1522586, DMS-1620345, DMS-1042998, DMS-1419027), Office of Naval Research (Grant No. N000141310408), National Natural Science Foundation of China (Grant No. 11526113), Jiangsu Key Lab for NSLSCS (Grant No. 201602), and by Jiangsu Provincial Foundation Award (No. BK20050538).
Author information
Authors and Affiliations
Corresponding author
Additional information
The research of Chunmei Wang was partially supported by National Science Foundation Award DMS-1522586, National Natural Science Foundation of China Award #11526113, Jiangsu Key Lab for NSLSCS Grant #201602, and by Jiangsu Provincial Foundation Award #BK20050538.
The research of Haomin Zhou was supported by NSF Faculty Early Career Development(CAREER) Award DMS-1620345, DMS-1042998, DMS-1419027, and ONR Award N000141310408.
Rights and permissions
About this article

Cite this article
Wang, C., Zhou, H. A Weak Galerkin Finite Element Method for a Type of Fourth Order Problem Arising from Fluorescence Tomography. J Sci Comput 71, 897–918 (2017). https://doi.org/10.1007/s10915-016-0325-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-016-0325-3
Keywords
- Weak Galerkin
- Finite element methods
- Fourth order problem
- Weak second order elliptic operator
- Fluorescence tomography
- Polygonal or polyhedral meshes