
Abstract
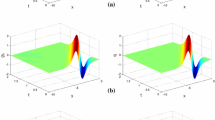
We develop a stability and convergence theory for a Discontinuous Galerkin formulation (DG) of a highly indefinite Helmholtz problem in \(\mathbb R ^{d}\), \(d\in \{1,2,3\}\). The theory covers conforming as well as non-conforming generalized finite element methods. In contrast to conventional Galerkin methods where a minimal resolution condition is necessary to guarantee the unique solvability, it is proved that the DG-method admits a unique solution under much weaker conditions. As an application we present the error analysis for the \(hp\)-version of the finite element method explicitly in terms of the mesh width \(h\), polynomial degree \(p\) and wavenumber \(k\). It is shown that the optimal convergence order estimate is obtained under the conditions that \(kh/\sqrt{p}\) is sufficiently small and the polynomial degree \(p\) is at least \(O(\log k)\). On regular meshes, the first condition is improved to the requirement that \(kh/p\) be sufficiently small.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper we analyze a discontinuous Galerkin method applied to the following model Helmholtz problem:
Here, \(\varOmega \) is a bounded Lipschitz domain in \(\mathbb R ^{d}\), \(d\in \{2,3\}\), and \(k\ge k_0 > 0\) is the real and positive wavenumber bounded away from zero. The outer normal vector to \(\partial {\varOmega }\) is denoted \(\mathbf{n}\), and we write \(\mathrm{i}=\sqrt{-1}\) for the imaginary unit. We assume \(f\in L^{2}(\varOmega )\) and \(g\in L^{2}(\partial {\varOmega })\). By \(H^{s}(\varOmega )\) we denote the usual Sobolev space with norm \(\Vert \cdot \Vert _{H^{s}(\varOmega )}\), [1]. The seminorm which contains only the derivatives of order \(s\) is denoted by \(\vert \cdot \vert _{H^{s}(\varOmega )}\).
The weak formulation for (1.1) is given by: Find \(u\in V:=H^{1} (\varOmega )\) such that
where
Existence and uniqueness for the continuous problem were proved in [34] for bounded Lipschitz domains.
Problems in high-frequency scattering of acoustic or electro-magnetic waves are highly indefinite, and the design of discretization methods that behave robustly with respect to the amount of indefiniteness is of great importance. For our model problem, the highly indefinite case arises for high wavenumbers \(k\), and the solution \(u\) is highly oscillatory. It is well-known for such problems that low order finite elements suffer from the pollution effect, which mandates very fine meshes, [30]. For example, the classical analysis for lowest order \(\mathbb P _{1}\)-finite element spaces (see, e.g., [41], [30, Sec. 4]) guarantees unique solvability and quasi-optimality only under the condition that the number of degrees of freedom \(N\) satisfies \(N\gtrsim k^{2d}\), where \(d\) is the spatial dimension. We hasten to add that the conditions on the mesh size are less stringent for higher order FEM. A particular example is the analysis of [36, 37], which shows for high order methods that linking the polynomial degree \(p\) logarithmically to the wavenumber can lead to a stable method with few degrees of freedom per wavelength. We mention that on regular meshes the pollution error can also be understood by a dispersion analysis that quantifies the phase difference between the exact solution and the numerical solution, [2–5, 13, 16, 30–32].
While the existence of discrete solutions for classical, conforming finite element discretizations is understood, it is worth stressing that a minimal resolution condition is required to ensure their existence. This observation motivates the quest for stabilized variational formulations that always guarantee the discrete stability of the method (existence and uniqueness of the discrete solution). Prominent examples of these types of methods are those incorporating least squares ideas, [17, 26, 27, 38] and Discontinuous Galerkin (DG) methods. Several variants of DG methods based on standard piecewise polynomial spaces are analyzed, for example, in [19–21, 44, 45]. They feature unique solvability of the discrete systems without any resolution conditions; yet, it is worth pointing out that reduced or no convergence takes place in the preasymptotic regime.
The Ultra Weak Variational Formulation (UWVF) of Cessenat and Després [8, 9, 14] can be understood as a DG method that permits using non-standard, discontinuous local discretization spaces such as plane waves (see [7, 23, 28, 29]). In present paper we follow the idea of [23], where a DG method was derived from the UWVF for the Helmholtz problem. For plane waves as local ansatz spaces in this DG method, [23] shows linear convergence of the method under appropriate resolution conditions. By specializing to homogeneous Helmholtz problems [28] establishes quasi-optimal convergence (in a norm dictated by the method) without any resolution condition.
The goal of our work is to develop a theory for the same DG formulation as in [23] that allows us to infer the convergence behavior of abstract conforming and non-conforming generalized finite element spaces from certain local approximation properties and local inverse estimates, which may be easy to check, possibly even at run-time.
This paper is structured as follows: In Sect. 2, we recall from [23] a DG method for the Helmholtz problem (1.1). Section 3 is devoted to discrete stability and convergence. The unified theory presented there covers two popular choices of approximation spaces, namely, spaces consisting of piecewise plane waves and conforming as well as non-conforming polynomial \(hp\)-finite element spaces on affine simplicial meshes. Nevertheless, we also derive an abstract approximation criterion for general finite element spaces that implies existence and uniqueness of the discrete solution. Based on these results, we obtain quasi-optimal convergence in the DG-norm for general finite element spaces [40].
In Sect. 4 we apply the results of Sect. 3 to the \(hp\)-version of the polynomial FEM. We obtain a convergence theory that is explicit in the wavenumber \(k\) as well as the mesh width \(h\) and the polynomial degree \(p\). These results may be viewed as an extension of the results [36, 37] for classical \(H^{1}\)-conforming discretizations to the DG-setting. In these papers, a scale resolution condition of the form
(for suitable \(c_{1}\), \(c_{2}\)) is sufficient to guarantee quasi-optimality. For the \(hp\)-version of the DG-FEM on regular meshes, or, more generally, meshes that permit sufficiently rich \(H^{1}\)-conforming subspaces of the non-conforming DG-space, the same condition yields quasi-optimality. In the general case, the slightly stronger condition (4.16) is a sufficient condition for quasi-optimality [40]. In particular, we show, for the first time for a DG method on regular meshes, that quasi-optimality can be obtained for a fixed number of degrees of freedom per wavelength. Two appendices conclude the article. Appendix 1 gives details for the regularity result Theorem 4.5. Appendix 2 is concerned with elementwise defined \(hp\)-approximations that are optimal in the broken \(H^2\)-norm; this result is required for the proof of Theorem 4.11.
2 Discontinuous Galerkin Method
2.1 Meshes and Spaces
To formulate the DG method we first introduce some notation. Let \(\varOmega \subset \mathbb R ^{d}\), \(d\in \{2,3\}\), denote a polygonal (\(d=2\)) or polyhedral (\(d=3\)) Lipschitz domain.Footnote 1 The DG problem is based on a partition \(\fancyscript{T}\) of \(\varOmega \) into non-overlapping curvilinear polygonal/polyhedral subdomains (“finite elements”) \(K\); hanging nodes are allowed. The local and global mesh width is denoted by
In the case \(d=3\), the boundary of \(K\) can be split into faces and for \(d=2\) into edges. For ease of notation we use the terminology “faces” in both cases. For \(K\in \fancyscript{T}\), we denote the set of faces by \(\fancyscript{E}(K)\). The subset of interior faces, i.e., the set of faces of \(K\) which are not lying on \(\partial \varOmega \), is denoted by \(\fancyscript{E}^{\fancyscript{I}}(K)\). For instance the number \(\sharp \fancyscript{E}(K)=d+1\) if \(K\) is a simplex. As a convention we consider the finite elements \(K\in \fancyscript{T}\) always as open sets and the faces \(e\in \fancyscript{E}(K)\) as relatively open sets.
The interior skeleton \(\mathfrak S _{\fancyscript{T}}^{\fancyscript{I}}\) and the boundary skeleton \(\mathfrak S _{\fancyscript{T}}^{\fancyscript{B}}\) are given by
Note that \(\mathfrak S _{\fancyscript{T}}^{\fancyscript{I}}\), \(\mathfrak S _{\fancyscript{T}}^{\fancyscript{B}}\) are the union of the relative interior of the faces and, consequently, for any point \(x\in \mathfrak S _{\fancyscript{T} }^{\fancyscript{I}}\), there exist exactly two elements in \(\fancyscript{T}\) (denoted by \(K_{x}^{+}\), \(K_{x}^{-}\)) with \(x\in \overline{K_{x}^{+}}\cap \overline{K_{x}^{-}}\).
Also define \(\nabla _{\fancyscript{T}}\) and \(\varDelta _{\fancyscript{T}}\) as elementwise applications of the operators \(\nabla \) and \(\varDelta \), respectively. The one-sided restrictions of some \(\fancyscript{T}\)-piecewise smooth function \(v\) for \(x\in \mathfrak S _{\fancyscript{T}}^{\fancyscript{I}}\) are denoted by
We use the same notation for vector-valued functions.
We define the averages and jumps for \({\fancyscript{T}}\)-piecewise smooth scalar-valued functions \(v\) and vector-valued functions \(\sigma _{S}\) on \(\mathfrak S _{\fancyscript{T}}^{\fancyscript{I}}\) by
where \(\mathbf{n}^{+}(x)\), \(\mathbf{n}^{-}(x)\) denote the (outer) normal vectors of elements \(K_{x}^{+}\), \(K_{x}^{-}\).
Based on the partition \({\fancyscript{T}}\) we can introduce broken Sobolev spaces in the standard way: For \(s\ge 0\), we set
2.2 Discrete Formulation
We approximate the solution of (1.3) from an abstract finite-dimensional space \(S \subset H^{2} _{\mathrm{pw}}(\varOmega )\), i.e., only the following two conditions are imposed:
We briefly recall the derivation of the DG formulation from the UWVF as in [23]. We denote by \((\cdot ,\cdot )\) the \(L^{2}\) inner product on \(\varOmega \), i.e., \((u,v)=\int _{\varOmega }u\overline{v}dV\). Let \(S\) be a discrete space as in (2.3). Let \(\alpha \in L^{\infty }(\overline{\mathfrak{S }_{\fancyscript{T}}^{\fancyscript{I}}})\), \(\beta \in L^{\infty }(\overline{ \mathfrak{S }_{\fancyscript{T}}^{\fancyscript{I}}})\), and \(\delta \in L^{\infty }(\overline{\mathfrak{S }_{\fancyscript{T}}^{\fancyscript{B}}})\) be some positive and bounded functions on the mesh skeletons. (It will turn out that these functions can be chosen to be piecewise constant on a certain partition of the skeleton as elaborated in Remark 2.2.) Then, the DG formulation can be written in the following form, [23, 28]:
Find \(u_{S}\in S\) such that, for all \(v\in S\),
where \(a_{\fancyscript{T}}(\cdot ,\cdot )\) is the DG-bilinear form on \(S\times S\) defined by
Note that \(a_{\fancyscript{T}}(\cdot ,\cdot )\) can be extended to a sesquilinear form on \(H_{\mathrm{pw}}^{3/2+{\varepsilon }}( \varOmega )\times H_{\mathrm{pw}}^{3/2+{\varepsilon }}( \varOmega )\) for any \({\varepsilon }>0\). So far, the functions \(\alpha \), \(\beta \), \(\delta \) are arbitrary, positive \(L^{\infty }\) functions. Our analysis will rely on certain properties of \(\alpha \) that depend on some trace inverse estimates for the space \(S\). We therefore introduce:
Definition 2.1
(inverse trace inequality) For each element \(K\), the constant \(C_{\mathrm{trace}}(S,K)\) is the smallest constant such that
Remark 2.2
The analysis of the continuity and coercivity will lead to the condition
For the special case that \(S\) is a conforming/non-conforming polynomial \(hp\)-finite element space, the estimate of the approximation property of \(S\) with respect to the \(\Vert \cdot \Vert _{DG}\) and \(\Vert \cdot \Vert _{DG^{+}}\) norms, (cf. Sect. 4.2 ahead) leads to the choices
where the parameter \(\mathfrak a \) is selected fixed but sufficiently large; the parameters \(\mathfrak b \), \(\mathfrak d \) are selected to be of size \(O(1)\). \(\square \)
Remark 2.3
It is easy to see that \(x \mapsto \alpha (x)\) can be chosen piecewise constant with respect to a sub-partition \(\fancyscript{E}\) of the set of all faces. More precisely, we define a subdivision of the set of inner faces by
where \(\overset{\circ }{\partial K}:=\bigcup \limits _{e\in \fancyscript{E}(K)}e\). For any \(e^{\prime }\in \fancyscript{E}^{\fancyscript{I}}\), the maximum in (2.7) over \(x\in e^{\prime }\) can always be chosen as one fixed element \(K\) so that the value of \(\alpha \) is constant along \(e^{\prime }\). Hence, without loss of generality we may assume in the following that \(\alpha \) is chosen as an \(\fancyscript{E}\)-piecewise constant function. Note that the assumption “\(\alpha \) is positive” then implies for each \(K \in \fancyscript{T}\)
for some \(X\in \overset{\circ }{\partial K} \cap \varOmega \). \(\square \)
In the rest of this section we will show that the discretization given by the sesquilinear form \(a_{\fancyscript{T}}\) is consistent as well as adjoint consistent. The latter property will prove particularly useful to obtain error estimates.
Lemma 2.4
(consistency) Let the exact solution \(u\) of (1.2) be in \(H^{3/2+{\varepsilon }}(\varOmega )\) for some \({\varepsilon }>0\). Then \(u\) satisfies, with the right-hand side \(F_{\fancyscript{T}}\) given in (2.4), the consistency condition
Proof
From the \(H^{3/2+{\varepsilon }}\)-regularity of \(u\) it follows that \(u\) and \(\nabla u\) have well-defined traces on \(\partial K\) for each \(K\in {\fancyscript{T}}\) and
We multiply both sides of Eq. (1.1) by a test function \(v\in S\), integrate elementwise, sum over all elements, and integrate by parts to get
From the definition of the jumps on the inner faces and the boundary condition (1.2), we get
The boundary condition (1.2) gives us
Inserting this result into Eq. (2.10) leads to
which (2.4) as desired. \(\square \)
Lemma 2.7 below will establish the consistency with respect to the following adjoint problem.
Definition 2.5
(adjoint solution operator \(\varvec{N_{k}^{*}}\) ) The adjoint Helmholtz problem is given by:
The solution operator \(N_{k}^{*}:L^{2}( \varOmega )\rightarrow H^{1}(\varOmega )\) is characterized by the condition
We say that problem (2.11) has \(H^{s}(\varOmega )\) -regularity for some \(s>1\) if for any given right-hand side \(w\in L^{2}(\varOmega )\) the solution \(\phi \) of (2.11) is in \(H^{s}(\varOmega )\) and satisfies
for some positive constant \(C_{\mathrm{reg}}\) that is independent of \(w\).
Remark 2.6
The adjoint problem (2.11) is a well-posed problem, for which even \(k\)-explicit regularity is available. For example, if \(\varOmega \) convex (or smooth and star-shaped), then \(\phi \in H^{2}(\varOmega )\) and
with \(C_{1}(\varOmega )\), \(C_{2}(\varOmega )>0\) independent of \(k\ge k_{0}>0\) (\(k_{0}\) is arbitrary but fixed), [34, Prop. 8.1.4] for \(d=2\) and [10] for \(d=3\). For general Lipschitz domains, we have by [15, Thm. 2.4]
for a constant \(C_{3}(\varOmega )\) independent of \(k\ge k_{0}\). For polygonal/polyhedral Lipschitz domains \(\varOmega \) the classical elliptic regularity theory provides \(\phi \in H^{3/2+{\varepsilon }}(\varOmega )\) for some \({\varepsilon }>0\), which depends on the geometry of \(\varOmega \). \(\square \)
Lemma 2.7
(adjoint consistency) Let the adjoint Helmholtz problem be \(H^{3/2+{\varepsilon }}(\varOmega )\)-regular for some \(\varepsilon > 0\). Then for any \(w\in L^{2}(\varOmega )\), the solution \(\phi :=N_{k}^{*}(w)\) of the adjoint problem (2.11) satisfies
Proof
From the \(H^{3/2+{\varepsilon }}(\varOmega )\)-regularity of \(\phi \) it follows that \(\phi \) and \(\nabla \phi \) have well-defined traces on \(\partial K\) for each \(K\in {\fancyscript{T}}\) and
The rest of the proof is just a repetition of the arguments in the proof of Lemma 2.4 by taking into account the zero Robin boundary conditions for the adjoint problem. \(\square \)
On \(H_{\mathrm{pw}}^{3/2+{\varepsilon }}(\varOmega )\) for \({\varepsilon }>0\) we will use the mesh-dependent norms \(\Vert \cdot \Vert _{DG}\) and \(\Vert \cdot \Vert _{DG^{+}}\) that were introduced in [23]:
3 Discrete Stability and Convergence Analysis
This section is devoted to the analysis of the discrete problem for the finite dimensional space \(S\) satisfying the condition (2.3).
3.1 Continuity and Coercivity
Proposition 3.1
Define \(b_{\fancyscript{T}}(u,v):=a_{\fancyscript{T}}(u,v)+k^{2} (u,v)\). For any \(0<\delta <\frac{1}{3}\) and \(\alpha \) satisfying (2.7), there exist constants \(c_\mathrm{coer}\), \(C_{\mathrm{c} }>0\) independent of \(h\), \(k\), \(\alpha \), \(\beta \), \(\delta \), and \(C_{\mathrm{trace}}(S,K)\) such that the following two statements are true:
-
(a)
The sesquilinear form \(b_{\fancyscript{T}}(\cdot ,\cdot )\) is coercive:
$$\begin{aligned} |b_{\fancyscript{T}}(v,v)|\ge c_{\mathrm{coer}}\Vert v\Vert _{DG}^{2}\quad \quad \forall v\in S. \end{aligned}$$ -
(b)
For any \({\varepsilon }>0\), the sesquilinear form \(b_{\fancyscript{T}}(\cdot ,\cdot )\) satisfies the following continuity estimates
$$\begin{aligned} |b_{\fancyscript{T}}(v,w_{S})|&\le C_{\mathrm{c}}\Vert v\Vert _{DG^{+}}\Vert w\Vert _{DG^{+}}\quad \quad \forall v,w\in H_{\mathrm{pw}}^{3/2+{\varepsilon }}\left( \varOmega \right) ,\end{aligned}$$(3.1)$$\begin{aligned} |b_{\fancyscript{T}}(v,w_{S})|&\le C_{\mathrm{c}}\Vert v\Vert _{DG^{+}}\Vert w_{S}\Vert _{DG}\quad \quad \forall v\in H_{\mathrm{pw}}^{3/2+{\varepsilon }}\left( \varOmega \right) , \quad \forall w_{S}\in S,\end{aligned}$$(3.2)$$\begin{aligned} |b_{\fancyscript{T}}(w_{S},v)|&\le C_{\mathrm{c}}\Vert v\Vert _{DG^{+}}\Vert w_{S}\Vert _{DG}\quad \quad \forall v\in H_{\mathrm{pw}}^{3/2+{\varepsilon }}\left( \varOmega \right) ,\quad \forall w_{S}\in S. \end{aligned}$$(3.3)
Proof
The proof uses the same argument as [23, Props. 4.2, 4.4]; we trace the dependence on our abstract framework and work out constants explicitly.
-
(a)
The definition of \(b_{\fancyscript{T}}(.,.)\) leads to
$$\begin{aligned} b_{\fancyscript{T}}(v,v)&= \Vert \nabla _{\fancyscript{T}}v\Vert _{L^{2}\left( \varOmega \right) }^{2}-2\mathrm{Re}\left( \int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{I}}}[\![v]\!]_{N}\cdot \{\overline{\nabla _{\fancyscript{T}}v}\}dS\right) -2\mathrm{Re} \left( \int _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{B}}} \delta v\overline{\nabla _{\fancyscript{T}}v\cdot \mathbf{n}}dS\right) \\&+\,\mathrm{i}k^{-1}\Vert \beta ^{1/2} [\![\nabla _{\fancyscript{T} }v]\!]_{N}\Vert _{L^{2}\left( \mathfrak S _{\fancyscript{T}}^{\fancyscript{I} }\right) }^{2}+\mathrm{i}k^{-1}\Vert \delta ^{1/2}\nabla _{\fancyscript{T} }v\cdot \mathbf{n}\Vert _{L^{2}\left( \mathfrak S _{\fancyscript{T}}^{\fancyscript{B}}\right) }^{2}\\&+\,\mathrm{i}k\Vert \alpha ^{1/2}[\![v]\!]_{N}\Vert _{L^{2}\left( \mathfrak S _{\fancyscript{T}}^{\fancyscript{I}}\right) } ^{2}+\mathrm{i}k\Vert (1-\delta )^{1/2}v\Vert _{0,\mathfrak S _{\fancyscript{T}}^{\fancyscript{B}}}^{2}+k^{2}\Vert v\Vert _{L^{2}\left( \varOmega \right) }^{2}. \end{aligned}$$
By using Young’s inequality for some positive function \(s\in L^{\infty }( \overline{\mathfrak{S }_{\fancyscript{T}}^{\fancyscript{I}}})\) we get for the second term in the representation of \(b_{\fancyscript{T}}(\cdot ,\cdot )\)
We choose \(s:=4\alpha /5\). By using (2.7) we get
For the second summand, we get with \(\alpha _{\partial K}^{\min }\) as in (2.9)
Let \(X\in \overset{\circ }{\partial K}\cap \varOmega \) be defined as in Remark 2.3. Since \(K\in \{ K_{X}^{+},K_{X}^{-}\}\), the condition on \(\alpha \) [cf. (2.6)] implies
Hence,
All in all we have derived
The third term in \(b_{\fancyscript{T}}(\cdot ,\cdot )\) can be estimated in a similar fashion for any \(t>0\) by
By choosing \(0<\delta <\frac{1}{3}\) as well as \(t=3/2\) we obtain
-
(b)
Using Young’s inequality we get
$$\begin{aligned}&\!\!\! |b_{\fancyscript{T}}(v,w)|\nonumber \\&\!\!\!\quad \le |(\nabla _{\fancyscript{T}}v,\nabla _{\fancyscript{T} }w)| +k^{2}|(v,w)| +\!\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{I}}} [\![v]\!]_{N}\cdot \{\overline{\nabla _{\fancyscript{T}}w} \}dS\right| +\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{I}}} \{\nabla _{\fancyscript{T} }v\}\cdot [\![\overline{w} ]\!]_{N}dS\right| \nonumber \\&\!\!\!\quad \quad \!+\!\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{B}}} \delta v\overline{\nabla _{\fancyscript{T}} w\cdot \mathbf{n}}dS\right| +\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{B}}} \delta \nabla _{\fancyscript{T} }v\cdot \mathbf{n}\overline{w}dS\right| + \frac{1}{k}\left| ~\int \limits _\mathfrak{S _{\fancyscript{T} }^{\fancyscript{I}}}\left( \beta [\![\nabla _{\fancyscript{T}}v ]\!]_{N} [\![\overline{\nabla _{\fancyscript{T}}w} ]\!]_{N}\right) dS\right| \nonumber \\&\!\!\!\quad \quad +\frac{1}{k}\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{B}}} \left( \delta \nabla _{\fancyscript{T}}v\cdot \mathbf{n}\overline{\nabla _{\fancyscript{T}} w\cdot \mathbf{n}}\right) dS\right| \!+\!\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{I}} }\left( k\alpha [\![v]\!]_{N}[\![\overline{w} ]\!]_{N}\right) dS\right| \!+\!k\left| ~\int \limits _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{B}}} (1\!-\!\delta )v\overline{w}dS\right| .\nonumber \\ \end{aligned}$$(3.6)
For \(0<\delta <1/3\) and for any \(v\), \(w\in H_{\mathrm{pw}} ^{3/2+{\varepsilon }}(\varOmega )\) we finally obtain
Estimates in weaker norms are possible if one of these two functions is from the discrete space \(S\), e.g., \(w\in S\). A careful inspection of Eq. (3.6) shows that the only term which requires the \(DG^{+}\)-norm instead of \(DG\)-norm for \(w\) in the continuity estimate is \(\int _\mathfrak{S _{\fancyscript{T}}^{\fancyscript{I}}} [\![v]\!]_{N} \cdot \{\overline{ \nabla _{\fancyscript{T}}w}\}dS\). Using Young’s inequality we get
We apply the trace inequality in (2.6) and also (2.7 ) to obtain
Hence, we finally obtain (3.2). The estimate (3.3) can be shown using the same techniques or derived from (3.2) by observing that for \(v\), \(w\in H_{\mathrm{pw}}^{3/2+\varepsilon } (\varOmega )\) we have
where we have added the subscript \(k\) (or \(-k\)) to emphasize how the parameter \(k\) enters the definition. \(\square \)
Remark 3.2
The restriction \(0<\delta <1/3\) in Proposition 3.1 was made to simplify the proof and may be relaxed to \(0<\delta <1/2\). Then, the coercivity constant is bounded from below but degenerates to zero as \(\delta \rightarrow 1/2\). This can be shown by assuming \(0<\delta \le 1/2-{\varepsilon }\) and \(t=1/(1-2{\varepsilon })\) with \(0<{\varepsilon }<1/2\). Following similar steps as in (3.5), one can show
\(\square \)
As a corollary of (3.3) we have the following continuity assertion, which will be useful for certain adjoint problems:
Corollary 3.3
For any \({\varepsilon }>0\), it holds
3.2 Quasi-Optimality
We start with a definition: We say that a pair \((u,u_{S})\in H_{\mathrm{pw}}^{3/2+\varepsilon }(\varOmega )\times S\) of functions satisfies the Galerkin orthogonality if
Our starting point for the analysis of our DG problem is a quasi-optimality result which is proved under the assumption that the above Galerkin orthogonality is valid. The existence and uniqueness of a solution \(u_{S}\) of the discrete problem (2.4) is then shown in a second step based on the quasi-optimality result.
Proposition 3.4
There exists a constant \(\widetilde{C} > 0\) depending solely on the constants \(C_{c}\), \(c_{\mathrm{coer}}\) of Proposition 3.1 such that the following is true: Any pair \((u,u_{S}) \in H^{3/2+\varepsilon }_{\mathrm{pw}}(\varOmega ) \times S\) meeting the orthogonality condition (3.8) satisfies
Proof
For the reader’s convenience, we include the proof taken from [23, Proposition 4.4]. We start with a triangle inequality
and employ the coercivity of \(b_{\fancyscript{T}}(\cdot ,\cdot )\)
where in the last inequality we employed the orthogonality condition (3.8). The continuity of \(b_{\fancyscript{T}}(\cdot ,\cdot )\) expressed in (3.1) together with (3.10) implies
We combine this result with (3.9) and obtain
\(\square \)
Next, we will use the adjoint problem to gauge the contribution \(\sup _{w_{S}\in S}\frac{k|(u-u_{S},w_{S})|}{\Vert w_{S}\Vert _{L^{2}(\varOmega )}}\) in Proposition 3.4.
Proposition 3.5
Assume that the adjoint Helmholtz problem is \(H^{3/2+\varepsilon }(\varOmega )\) regular for some \(\varepsilon > 0\). Let the coefficients in the definition of \(a_{\fancyscript{T}}(\cdot ,\cdot )\) satisfy \(0<\delta <1/3\) and (2.7). Then the following is true: For any pair \((u,u_{S}) \in H^{3/2+\varepsilon }_{\mathrm{pw}}(\varOmega ) \times S\) that satisfies (3.8) we have
where the adjoint approximation property is defined by
Proof
Write \(\phi = N_{k}^{*}(w_S)\) for the solution of (2.12) with right-hand side \(w_S \in S \subset L^2(\varOmega )\). Our regularity assumption implies \(\phi \in H^{3/2+{\varepsilon }}(\varOmega )\) for some \({\varepsilon }>0\) (cf. Remark 2.6). The adjoint consistency of the method stated in Lemma 2.7 then provides
Using the definition of the sesquilinear form \(a_{\fancyscript{T}}\) and the Galerkin orthogonality, we get for any \(v\in S\)
Since \(v\), \(\psi _{S}\in S\) are arbitrary, the statement follows. \(\square \)
The combination of the previous results leads to the following wavenumber-explicit error estimate (still under the assumption of existence of a discrete solution).
Theorem 3.6
(quasi-optimal convergence) Assume that the adjoint Helmholtz problem is \(H^{3/2+\varepsilon }(\varOmega )\) regular for some \(\varepsilon > 0\). Let the coefficients in the definition of \(a_{\fancyscript{T}}\left( \cdot ,\cdot \right) \) satisfy \(0<\delta <1/3\) and (2.7). If the condition
holds, then for any pair \((u,u_{S}) \in H^{3/2+\varepsilon } _{\mathrm{pw}}(\varOmega ) \times S\) that satisfies (3.8) we have
where \(C\) depends solely on \(C_{c}\) and \(c_{\mathrm{coer}}\).
Proof
By combining the results of Propositions 3.4 and 3.5, we get the following:
The condition \(\frac{2(1+C_{c})}{c_{\mathrm{coer}}}\eta _{k}(S)<1/2\) allows us to absorb the error term on the right-hand side in the left-hand side. \(\square \)
3.3 Discrete Stability
The preceding section provides an error analysis under the assumption of existence of the discrete solution \(u_{S}\in S\) of (2.4). Extra conditions have to be imposed for existence as the following Example 3.7 shows. That is, the discontinuous Galerkin method for the Helmholtz problem is not necessarily stable for an arbitrary discrete space \(S\) that only satisfies the minimal condition (2.3).
Example 3.7
Let \(\varOmega := \mathrm{conv}\{(0,0)^{\intercal }, (1,0)^{\intercal }, (0,1)^{\intercal }\}\) and let the mesh \(\fancyscript{T}\) consists of the single element \(\{\varOmega \}\). A (one-dimensional) space \(S\) that satisfies condition (2.3) is defined by the span of the squared cubic bubble function, \(S=\mathrm{span}\{(27\lambda _{1}\lambda _{2}\lambda _{3})^{2}\}\), where \(\lambda _{1}=\xi _{1},\,\lambda _{2}=\xi _{2},\,\lambda _{3}=1-\xi _{1}-\xi _{2}\) and \(0\le \xi _{1}\le 1,\,0\le \xi _{2}\le 1-\xi _{1}\). In this case, Eq. (3.16) reduces to
As \(S\) is a one-dimensional space we get the following \(1\times 1\) system \((A-k^{2}B)w=0,\) where \(A=\int _{\widehat{K}}\nabla b_{1}\cdot \nabla b_{1}=5.1125,\, B=\int _{\widehat{K}}b_{1}^{2}= 0.0843\) and \(b_{1}=(27\lambda _{1}\lambda _{2}\lambda _{3})^{2}\). Obviously, the value of \(k=\sqrt{\frac{A}{B}}\) is a critical wavenumber where the system matrix becomes singular. \(\square \)
In this section, we will study conditions under which the DG problem admits a unique solution in the discrete space \(S\). One possible condition (3.14) is formulated in Theorem 3.8 and it is shown that this condition is always satisfied for plane waves methods as well as for conforming and non-conforming polynomial \(hp\)-finite element spaces on affine simplicial meshes (cf. Remark 3.9). Thus, Theorem 3.8 presents a unified stability theory for these types of methods and shows that a unique numerical solution always exists for these important choices of spaces. This is in contrast to conventional Galerkin methods applied to (1.3), where a minimal resolution condition on the finite element space, e.g., on the mesh width, has to be imposed in order to guarantee unique solvability of the discrete equations.
Alternatively, as in the classical Galerkin discretization, a condition on the adjoint approximation property on the abstract space can be employed to prove existence, uniqueness, and quasi-optimality of the discretization. This is proved in Theorem 3.10.
Theorem 3.8
Let the discrete space \(S\) satisfy (2.3). Let \(\beta \ge 0\), \(0<\delta <1/3\), and choose \(\alpha \) such that (2.7) is satisfied. Then, the DG problem (2.4) has a unique solution \(u_{S} \in S\) if
Furthermore, let the exact solution of (1.3) satisfy \(u\in H^{3/2+{\varepsilon }}(\varOmega )\), and let the adjoint Helmholtz problem be \(H^{3/2+{\varepsilon }}(\varOmega )\) regular for some \({\varepsilon }>0\). Assume the adjoint approximation condition
Then, the quasi-optimal error estimate
holds, where \(C\) is independent of \(k\) and the space \(S\).
Proof
If the discrete solution \(u_{S} \in S\) of (2.4) exists, then the consistency statement Lemma 2.4 implies the orthogonality condition (3.8) so that the quasi-optimality assertion follows from Theorem 3.6. It therefore remains to assert existence of \(u_{S} \in S\). By dimension arguments, existence of a solution \(u_{S} \in S\) of (2.4) follows, if we can verify the following uniqueness assertion:
We prove (3.15) indirectly, by showing the equivalent implication:
For any \(w_{S}\in S\) it holds:
Our assumption in (3.16) implies for any \(w_{S}\in S\)
First we choose \(v_{S}=w_{S}\) in (3.17). From the equation for the imaginary part we obtain
and this implies \(w_{S}\in H_{0}^{2}(\varOmega )\cap S\) (in particular, it implies \(\nabla _{\fancyscript{T}}w_{S}=\nabla w_{S}\)). Hence, the real part of Eq. (3.17) gives us
Define \(v_{S}^{*}(x)=\langle x,\nabla w_{S}\rangle \). From the real part of Eq. (3.17) it follows
By using \(2\mathrm{Re}(w_{S}\nabla \overline{w_{S}})= \nabla (|w_{S}|^{2})\) for the first term, and continuity of \(a_{\fancyscript{T}}\), and applying Cauchy-Schwarz inequality we get (see also [19, 34])
Using the definition of DG-norm and taking into account that \(w_{S}\in H_{0}^{2}(\varOmega )\cap S\) we get \(\Vert w_{S}\Vert _{DG}=\Vert w_{S} \Vert _{\fancyscript{H}}\), where \(\Vert w_{S}\Vert _{\fancyscript{H}}^{2}:=\Vert \nabla w_{S}\Vert _{L^{2}( \varOmega )}^{2}+k^{2}\Vert w_{S}\Vert _{L^{2}( \varOmega )}^{2}\). For \(d=1\), we get
If \(C_{S}<\frac{k}{2(1+C_{c})}\) then it follows that \(w_{S} =0\,\text{ in }\,\varOmega \). For \(d=2\), 3 we add (3.18) to the Eq. (3.19) and then proceed with the same argument as in 1d. \(\square \)
Remark 3.9
For general finite-dimensional spaces \(S\), condition (3.14) could be interpreted as a condition on the scale resolution. However, the condition (3.14) is always satisfied in the following two important cases:
-
In [23] the variational formulation (2.4) was derived for the discretization by locally (discontinuous) plane waves. In that setting, condition (3.14) is not imposed since it is trivially satisfied as then \(S\cap H_{0}^{2}(\varOmega )=\{0\}\) (this equality follows from the unique continuation principle for elliptic PDEs—see, e.g., the discussion in [15, Sec. 6.3] for details).
-
DG-methods based on classical piecewise polynomials on affine triangulations (consisting of simplices) satisfy (3.14) automatically as \(\langle x,\nabla _{\fancyscript{T}}w_{S}\rangle \in S\). The proof is closely related to the arguments presented in [19–21]. Indeed, the key observation in these references is that, for given \(u\in S\), elementwise defined test functions of the form \(u\) and \(x\cdot \nabla u\) or, more generally, \(\alpha (x-x_{\varOmega })\cdot \nabla u+\beta u\) (for constants \(\alpha \), \(\beta \) and a chosen point \(x_{\varOmega }\)) are useful to provide stability and error estimates. \(\square \)
For new generalized finite element spaces, it might be complicated to verify condition (3.14). In the following theorem, we present a different criterion which also implies discrete stability.
Theorem 3.10
Let the exact solution of (1.3) satisfy \(u\in H^{3/2+{\varepsilon }}(\varOmega )\) and let the adjoint Helmholtz problem be \(H^{3/2+{\varepsilon }}(\varOmega )\) regular for some \({\varepsilon }>0\). Assume that the coefficients in the definition of \(a_{\fancyscript{T}}(\cdot ,\cdot )\) satisfy \(0<\delta <1/3\) and (2.7). If the condition
holds, then the DG problem (2.4) has a unique solution \(u_{S}\in S\) and satisfies the quasi-optimality property (3.12).
Proof
The proof follows the lines in [33, Thm. 3.9]. We merely have to show existence of \(u_{S}\). Since the (2.4) corresponds to a linear system of equations, it suffices to show uniqueness. Therefore, let \(u_{S}\in S\) be in the kernel of the discrete operator, i.e., \(a_{\fancyscript{T}}(u_{S},v)-k^{2}( u_{S},v)=0\) for all \(v\in S\). Then the pair \((0,u_{S}) \in H^{3/2+\varepsilon }(\varOmega ) \times S\) satisfies the orthogonality condition (3.8). Hence, Theorem 3.6 implies \(\Vert 0-u_{S}\Vert _{DG}\le C\inf _{v\in S} \Vert 0-v\Vert _{DG+}=0\), which shows \(u_{S}=0\). Again, the quasi-optimality follows as a combination of Theorem 3.6 and Lemma 2.4. \(\square \)
4 Application to Polynomial \(hp\)-Finite Elements
Theorem 3.6 provides a quasi-optimal error estimate for abstract approximation spaces \(S\) that satisfy the conditions (2.3) and (3.14). The concrete choice of the space \(S\) enters the analysis via (a) the constant \(C_{\mathrm{trace}}(S,K)\), (b) the estimate of the approximation error \(\inf _{v\in S}\Vert u-v\Vert _{DG^{+}}\), c) the adjoint approximation property \(\eta _{k}(S)\), and d) the constant \(C_{S}\) in (3.14). As explained in Remark 3.9 the condition on \(C_{S}\) is “automatically” satisfied for polynomial \(hp\)-finite element spaces if affine meshes are considered. The focus in the present section is on non-affine meshes so that the stability of the DG method will be inferred from the condition on the adjoint approximability as discussed in Theorem 3.8. Our primary reason for considering curved elements is that our regularity theory for Helmholtz problems (see Theorems 4.5) is done for smooth (more precisely: analytic) geometries. In this setting, we derive explicit estimates for these quantities in the context of polynomial \(hp\)-finite element space which are explicit with respect to the polynomial degree \(p\), and the mesh size \(h\).
4.1 Preliminaries
We consider a partition of the domain \(\varOmega \) into “simplicial” elements. That is, the finite element mesh \(\fancyscript{T}\) consists of elements \(K\) that are the images of the reference element \(\widehat{K}\), i.e., the reference triangle (in 2D) or the reference tetrahedron (in 3D), under the element map \(F_{K}:\widehat{K}\rightarrow K\). The mesh width is denoted by \(h:=\max _{K\in \fancyscript{T}}\mathrm{diam}K\) [cf. (2.1)].
We use the symbol \(\nabla ^{n}\) to denote derivatives of order \(n\); more precisely, for a function \(u:\varOmega \rightarrow \mathbb R ,\varOmega \subset \mathbb R ^{d}\), we set
We will need some conditions on the element maps \(F_{K}\) of the triangulations in order to capture the approximation properties of the polynomial \(hp\)-FEM spaces. The following assumption will make this more precise. We emphasize that, in contrast to the case of \(H^1(\varOmega )\)-conforming subspaces, we do not require in the present context of DG-methods a “compatibility” condition for element maps of neighboring elements.
Assumption 4.1
(“simplicial” finite element mesh). Each element map \(F_{K}\) can be written as \(F_{K}=R_{K}\circ B_{K}\), where \(B_{K}\) is an affine map (containing the scaling by \(h_{K}\)) and \(R_{K}\) is analytic. Let \(\widetilde{K}:=B_{K}(K)\). The maps \(R_{K}\) and \(B_{K}\) satisfy for shape regularity constants \(C_{\mathrm{affine}},C_{\mathrm{metric} },\gamma >0\) independent of \(h\):
Remark 4.2
If the mapping \(R_{K}\) in Assumption 4.1 are affine we say that \(\fancyscript{T}\) is an affine triangulation.
The constants \(C\) in the estimates below may depend on the shape regularity constants in a continuous way and, possibly, increase with increasing values of \(C_{\mathrm{affine}}\), \(C_{\mathrm{metric}}\), and \(\gamma \). \(\square \)
In this paper we are allowed to consider non-conforming meshes with general interfaces, i.e., one mesh can be a submesh of the other one, or meshes can have entirely unmatched interfaces.
For meshes \(\fancyscript{T}\) satisfying Assumption 4.1 we define the following non-conforming space of piecewise (mapped) polynomials by
where \(\fancyscript{P}_{p}\) denotes the space of polynomials of degree \(p\). The mesh size function \(h_{\fancyscript{T}}\) is defined by \(h_{\fancyscript{T} }|_{K}:=\text{ diam }\,K\) for all \(K\in \fancyscript{T}\). The estimate of \(C_{\mathrm{trace}}(S,K)\) in these cases is a local trace estimate for multivariate polynomials:
Lemma 4.3
Let \({\fancyscript{T}}\) satisfy Assumption 4.1. Then there exists \(c_{\mathrm{inv}}>0\) independent of \(K\in {\fancyscript{T}}\) and \(p\) such that for the polynomial \(hp\)-finite element space \(S^{p,0} ({\fancyscript{T}})\) we have [cf. (2.6)]
Furthermore, for
which is independent of \(K\), \(p\), and \(k\), the choice of \(\alpha \) given in (2.8) implies the condition (2.7).
Proof
We merely prove the inverse estimate. On the reference element \(\widehat{K}\), we have with the multiplicative trace inequality and a standard polynomial inverse estimate (see, e.g., [42, Thm. 4.76], where the case \(d=2\) is covered) for any \(v\in {\fancyscript{P}}_{p}\)
The assumptions on the element maps \(F_{K}\) are such that the same \(h\)-dependence as in classical scaling argument are obtained, i.e., for \(v\in S^{p,0}({\fancyscript{T}})\) we get for each \(K\in {\fancyscript{T}}\)
For the actual estimate of interest, we let \(v\in S^{p,0}({\fancyscript{T}})\), fix \(K\), and set \(\widehat{v}:=v|_{K}\circ F_{K}\). We note \(\nabla v=(\nabla \widehat{v})\circ F_{K}\circ (F_{K}^{\prime })^{-1}\) with, by the assumptions on the properties of \(B_{K}\) and \(R_{K}\),
Applying the estimate (4.2) to the components of \(\nabla \widehat{v}\circ F_{K}\) and observing (4.3), one can show the desired result. \(\square \)
The trace inequality of Lemma 4.3 shows that the constant \(\mathfrak a \) in (2.8) can be selected such that (2.7) is satisfied. This observation implies the following result:
Theorem 4.4
Let \(\alpha \), \(\beta \), and \(\delta \) be chosen according to (2.8) with \(\mathfrak a \) sufficiently large. Let \(S=S^{p,0}({\fancyscript{T}})\) be the polynomial \(hp\)-finite element space based on a mesh \(\fancyscript{T}\) that satisfies Assumption 4.1.
-
If \(C_{S}\) satisfies condition (3.14) then the DG problem has a unique solution in \(S\).
-
If \(\fancyscript{T}\) is an affine triangulation of \(\varOmega \) and satisfies Assumption 4.1, then the DG problem has a unique solution in \(S\).
4.2 Convergence Analysis
In this section we will show that the solution \(u\) of the model boundary value problem (1.1), (1.2) can be approximated from the finite element space \(S^{p,0}(\fancyscript{T})\) provided that \(kh/\sqrt{p}\) is small enough and \(p\ge c\log k\) (with \(c\) sufficiently large independent of \(h\), \(k\), \(p\)). Under more stringent conditions on the mesh, we will show that this condition can be relaxed to the condition that \(kh/p\) be small enough and \(p\ge c\log k\).
The proof of this approximation property is based on the following decomposition lemma, which is a generalization of [37, Theorem 4.10], where the special case \(s = 0\) is covered:
Theorem 4.5
(Decomposition Lemma) Let \(\varOmega \in \mathbb R ^{d} \), \(d\in \{2,3\}\) be a bounded Lipschitz domain. Assume additionally that \(\varOmega \) has an analytic boundary. Assume furthermore that the solution operator \((f,g)\mapsto u:=S_{k}(f,g)\) for the Helmholtz boundary value problem (1.1), (1.2) satisfies
for some \(C_{\mathrm{stab}}\) and \(\vartheta \ge 0\) independent of \(k\). Fix \(s\in \mathbb{N }_{0}\). Then there exist constants \(C\), \(\lambda >0\) independent of \(k\ge k_{0}\) such that for every \(f\in H^{s}(\varOmega )\) and \(g\in H^{s+1/2}(\partial \varOmega )\) the solution \(u=S_{k}(f,g)\) of the Helmholtz problem (1.3) can be written as \(u=u_{H^{s+2}}+u_{\fancyscript{A} }\), where, for all \(n\in \mathbb N _{0}\)
Proof
The proof follows the lines of [37, Theorem 4.10]. The key modifications are collected in Appendix 1. \(\square \)
Remark 4.6
For the present model problem (1.1), (1.2) the assumption (4.4) holds with \(\vartheta = 5/2\) by [15, Thm. 2.4]. For star-shaped domains, \(\vartheta = 0\) is possible as shown in [34, Prop. 8.1.4] for \(d=2\) and subsequently for \(d=3\) in [10]. \(\square \)
4.2.1 Convergence analysis for General Non-conforming Polynomial \(hp\)-Finite Elements
In this section we consider general non-conforming polynomial \(hp\)-finite elements, where no interelement compatibility conditions are imposed on the element maps \(F_{K}\) that relate element maps of neighboring elements to each other. Hence, the conforming subspace \(S \cap H^{1}(\varOmega ) \subset S\) may be small. As we will discuss in more detail in Sect. 5 below, better results can be expected if the conforming subspace \(S \cap H^{1}(\varOmega ) \subset S\) is sufficiently rich.
We start with a lemma that takes the role of the standard scaling argument:
Lemma 4.7
Let \({\fancyscript{T}}\) be a shape-regular mesh in the sense of Assumption 4.1. Fix \(s\in \mathbb{N }_{0}\). Then for each \(K\in {\fancyscript{T}}\) and every sufficiently smooth \(v\) the following relations between \(v\) and \(\widehat{v}:=v|_{K}\circ F_{K}\) are true:
where \(C\) and the implied constants depend solely on the constants appearing in Assumption 4.1.
Proof
We will only consider the case of the \((s+2)\)nd derivatives. We note the form \(F_{K}=R_{K}\circ A_{K}\), where \(A_{K}\) is affine. This implies the estimates
where the constants depend only on the constants appearing in Assumption 4.1. The chain rule then implies the estimates for \(\Vert \nabla ^{s+2}\widehat{v}\Vert _{L^{2}(\widehat{K})}\). \(\square \)
For shape-regular triangulations (cf. Assumption 4.1) we have the following result:
Theorem 4.8
Let \(\varOmega \subset \mathbb R ^{d}\), \(d\in \{2,3\}\) be a bounded Lipschitz domain with analytic boundary. Let the mesh \({\fancyscript{T}}\) be shape-regular in the sense of Assumption 4.1. Fix \(s \in \mathbb{N }_{0}\). Let \(\alpha \), \(\beta \), \(\delta \) be chosen according to (2.8). Fix \(\overline{C} > 0\) and assume \(p \ge s+1\) as well as \(kh/p \le \overline{C}\). Then there exist constants \(C\), \(\sigma >0\) independent of \(h\), \(p\), and \(p\) such that, for every \(f\in H^{s}(\varOmega )\) and \(g\in H^{s+1/2}(\partial \varOmega )\), there holds
where \(C_{f,g}:=\Vert f\Vert _{H^{s}\left( \varOmega \right) }+\Vert g\Vert _{H^{s+1/2}(\partial \varOmega ) }\) and \(\vartheta \ge 0\) is given by (4.4) (note also Remark 4.6).
Proof
We employ the splitting \(u=u_{H^{s+2}}+u_{\fancyscript{A}}\) of Theorem 4.5 with \(u_{H^{s+2}}\in H^{s+2}(\varOmega )\) and the analytic part \(u_{\fancyscript{A}}\).
Following [36, Thm. 5.5], we approximate \(u_{H^{s+2}}\) and \(v_{\fancyscript{A}}\) separately in the ensuing steps 1 and 2.
1. step: From, e.g., [36, Lemma B.3], we know that for every \(s^{\prime }>d/2\) and every \(p\ge s^{\prime }-1\) there exists a bounded linear operator \(\pi _{p}:H^{s^{\prime }} (\widehat{K})\rightarrow \fancyscript{P}_{p}\) such that
Here, the constant \(C>0\) depends only on \(s^{\prime }\). By \(\widehat{K}\) we denote the reference element and by \(\widehat{e}\) one of its edges (in 2D) or faces (in 3D). We apply this approximation result with \(s^{\prime }=s+2\). The elementwise application of the operator \(\pi _{p}\) to \(u_{H^{s+2}}\) (pulled back to the reference element \(\widehat{K}\)) defines an approximation \(w_{H^{s+2}}\in S^{p,0}({\fancyscript{T}})\). By a scaling argument (cf. Lemma 4.7) and summation over all elements, the bound (4.9) with \(s^{\prime }=s+2\) implies that \(w_{H^{s+2}}\) satisfies
In order to estimate the terms of the \(DG^{+}\)-norm associated with the skeleton, we employ the choice of the parameters \(\alpha \), \(\beta \), \(\delta \) given in (2.8), viz.,
Recall the definition of \(\alpha _{\partial K}^{\min }\) as in Remark 2.3 and estimate (3.4). On the inner skeleton \(\mathfrak S _{\fancyscript{T}}^{I}\) we get
Let \(X\) denote the minimizer as in (3.4). Then, with the definition (4.11) we get
so that
Thus, we get by scaling (4.9), (4.10) to the mesh \(\fancyscript{T}\)
The following estimates can be obtained by similar arguments:
In total, we get the following approximation property for the \(H^{s+2}\)-part:
Using the assumption \(kh/p\le \overline{C}\), this can be simplified to
2. step: For the approximation of the analytic part \(u_{\fancyscript{A}}\), we construct an element \(w_{\fancyscript{A}}\in S^{p,0}({\fancyscript{T}})\) as follows. For each \(K\in \fancyscript{T}\), let the constant \(C_{K}\) by defined by
Then, we have
For \(q\in \{0,1,2\}\) we get the following estimate (see [36, Proof of Theorem 5.5]) for suitable \(\sigma >0\):
It is convenient to define the abbreviations:
By summing over all elements, it follows as in [36] by suitably adjusting the constant \(\sigma \)
In order to treat the terms associated with the skeleton \(\mathfrak S _{\fancyscript{T}}^{\fancyscript{I}}\cup \mathfrak S _{\fancyscript{T}}^{\fancyscript{B}}\) we use the multiplicative trace inequality (on \(\widehat{K}\) and Lemma 4.7)
to obtain
By using the estimate (4.12) we obtain
By using the estimates in Eq. (4.14) we get
Finally Eq. (4.13) gives us after suitably adjusting the constant \(\sigma \)
By the similar arguments we obtain the following estimates
The approximation property for the analytic part \(u_{\fancyscript{A}}\) with respect to the \(DG^{+}\) norm is then
where, in the last estimate we used the assumption \(kh/p \le \overline{C}\). The combination of the estimates of steps 1 and 2 leads to the assertion. \(\square \)
The approximation result Theorem 4.8 permits us to estimate the adjoint approximation property \(\eta (S)\) of (3.11):
Corollary 4.9
Let \(\varOmega \subset \mathbb R ^{d}\), \(d\in \{2,3\}\), be a bounded Lipschitz domain with analytic boundary. Let the mesh \(\fancyscript{T}\) be shape-regular in the sense of Assumption 4.1. Let \(\alpha \), \(\beta \), \(\delta \) be chosen according to (2.8). Fix \(\overline{C} > 0\) and assume \(kh/p \le \overline{C}\). Then there exist constants \(C\), \(\sigma >0\) such that \(\eta _{k}(S)\) defined in (3.11) satisfies
Proof
We apply Theorem 4.8 with \(s = 0\) and \(g = 0\). Given \(f \in L^{2}(\varOmega )\) let \(v=N_{k}^{*}(f)= \overline{N_{k}(\overline{f})}\). Hence, the regularity estimates of Theorem 4.5 (with \(g = 0\)) are applicable. The assumption \(kh/p \le \overline{C}\) allows us to estimate \((kh/p)^{2} \le C kh/\sqrt{p}\). \(\square \)
Finally, the convergence estimate for polynomial \(hp\)-FEM can be stated in the following theorem:
Theorem 4.10
(Convergence Estimate) Let \(\varOmega \subset \mathbb R ^{d}\), \(d\in \{2,3\}\), be a bounded Lipschitz domain with analytic boundary. Let the mesh \({\fancyscript{T}}\) be shape-regular in the sense of Assumption 4.1. Fix \(s\in \mathbb{N }_{0}\). Let \(\alpha \), \(\beta \), \(\delta \) be chosen according to (2.8) with \(\mathfrak a \) sufficiently large. Moreover, let \(0<\delta <1/3\). Then, there exist constants \(c_{1}\), \(c_{2}\), \(C>0\) independent of \(k,h\), and \(p\) such that under the assumptions
there holds for \(f\in H^{s}(\varOmega )\) and \(g\in H^{s+1/2}(\partial \varOmega )\) the a priori estimate
In particular, under the additional assumption that \(\mathfrak b \) and \(\mathfrak d \) satisfy \(\mathfrak b \), \(\mathfrak d \ge c_{0}>0\), there holds
Proof
By taking the constant \(\mathfrak a \) in (2.8) sufficiently large, we can ensure by Lemma 4.3 the condition (2.7). Hence the assertion is a combination of Theorems 3.10, 4.8 and Corollary 4.9. \(\square \)
4.2.2 Convergence Analysis for \(hp\)-FEM on Regular Meshes
When contrasting the estimate for the adjoint approximation property \(\eta _{k}(S)\) given in Corollary 4.9 and the final convergence result Theorem 4.10 with the corresponding ones for the classical conforming \(hp\)-FEM presented in [36, 37] one observes the suboptimality in \(p\) by half an order. This suboptimality is typical of \(p\)-explicit DG-methods and in general sharp, [22]. It can be removed if the \(hp\)-approximation space \(S\) is such that it contains an \(H^{1}(\varOmega )\)-conforming subspace that is sufficiently rich. The essential point of the argument is that the approximant \(w_{H^{s+2}}\) in the proof of Theorem 4.8 can be chosen to be in \(H^{1}(\varOmega )\) so that the following skeleton term vanishes:
We illustrate this procedure for a specific setting, namely, that of a regular mesh \({\fancyscript{T}}\) whose element maps satisfy the standard compatibility conditions for an \(H^{1}(\varOmega )\)-conforming discretization. Specifically, we require the mesh to be \(H^1\)-regular by which we mean: first, the partition has no hanging nodes or edges and, second, in addition to the conditions of Assumption 4.1 we require the element maps \(F_{K}\) and \(F_{K^{\prime }}\) of two elements \(K\), \(K^{\prime }\) that share an edge or face to induce the same parametrization on this edge or face. One of way of constructing such a mesh is to start from a fixed coarse macro triangulation on \(\varOmega \) into “patches” using curved elements (e.g., constructed with “transfinite blending” [24, 25] and [12, Chap. 5]) and then construct the actual triangulation with elements of size \(h\) by transporting refinements of the reference elements to physical space with the patch maps of the coarse triangulation. More details for such a procedure are given in [36, Example 5.1]. On such regular meshes, the standard \(H^{1}(\varOmega )\)-conforming \(hp\)-FEM spaces given as \(S^{p,1}({\fancyscript{T}}):= \{u \in H^1(\varOmega )\,|\, \forall K \in {\fancyscript{T}} :u|_K \circ F_k \in {\fancyscript{P}}_p\}\) have good approximation properties, which results in the following improvement over Theorem 4.8:
Theorem 4.11
Assume the hypotheses of Theorem 4.8. Assume additionally that the mesh \({\fancyscript{T}}\) is \(H^1\)-regular in the above sense. Then for \(S = S^{p,1}({\fancyscript{T}})\):
Proof
As in the proof of Theorem 4.8, we decompose \(u=u_{H^{s+2} }+u_{\fancyscript{A}}\). We will not discuss the approximation of \(u_{\fancyscript{A}}\) since its approximation follows the lines of [36, Thm. 5.5]. We construct an \(H^{1}(\varOmega )\)-conforming approximation \(w_{H^{s+2}}\in S\) to \(u_{H^{s+2}}\). This ensures the desired property (4.17). It remains to guarantee that \(w_{H^{s+2}}\) is constructed such that the optimal rate of convergence is achieved in the broken \(H^{1}\)-norm and \(L^{2}\)-norm and also for the trace of the gradient on the skeleton. Recall \(p \ge s+1\). In Appendix 2 (Cor. 7.4) we construct, for \(t>5/2\) (for \(d=2\)) and \(t>5\) (for \(d=3\)) a linear operator \(I:H^{t}(\varOmega )\rightarrow S\cap H^{1}(\varOmega )\) with the following approximation properties:
Set \(t^{*}=5/2\) for \(d=2\) and \(t^{*}=5\) for \(d=3\). If \(s+2>t^{*}\), we obtain the desired estimate for \(\Vert u - I u\Vert _{DG+}\) from this by summation over all elements. If \(s+2\le t^{*}\), then we employ the following interpolation argument due to [6]: Fix \(\sigma >t^{*}\). The Sobolev space \(H^{s+2}(\varOmega )\) can be characterized by interpolation (using the so-called “\(K\)-method” as described, for example, in [43]), and we have \(H^{s+2}(\varOmega )=(L^{2}(\varOmega ),H^{\sigma } (\varOmega ))_{\theta ,2}\) with \(\theta =(s+2)/\sigma \). Hence, we can find, for any \(t>0\), a function \(v_{t}\in H^{\sigma }(\varOmega )\) such that
Then [6, Lemma] gives the stability estimate \(\Vert u-v_{t}\Vert _{H^{s+2}(\varOmega )}\le C\Vert u\Vert _{H^{s+2}(\varOmega )}.\) Using interpolation estimates, we therefore arrive at
We select \(t=(h/p)^{\sigma }\). Then, the above estimates take the following form:
Using elementwise appropriate multiplicative trace inequalities yields
Finally, \(v_{t}\) is sufficiently smooth to allow us to apply the approximation operator \(I\) of Appendix 2 and bound \(\Vert v_{t} - I v_{t}\Vert _{DG+}\) with the aid of Corollary 7.4. \(\square \)
Remark 4.12
For \(H^1\)-regular meshes (in the above sense) the approximation result for the adjoint approximation property \(\eta _{k}(S)\) in Corollary 4.9 can be improved to
In turn, this results in an improvement of Theorem 4.10: the resolution condition (4.16) can be relaxed to
and the approximation result also improves to
\(\square \)
5 Conclusions
In this paper, we have formulated the discontinuous Galerkin method for abstract finite dimensional test and trial spaces (conforming and non-conforming ones). The concrete choice of this space \(S\) enters the stability and convergence analysis via the following four quantities.
-
(a)
Trace constant \(C_{\mathrm{trace}}\left( S,K\right) \). Due to the formulation as a discontinuous Galerkin method, which contains integral jump terms across element faces, it is quite natural that local trace estimates for the space \(S\) are required for the error analysis.
-
(b)
Approximation property \(\inf _{v\in S}\Vert u-v\Vert _{DG^{+}}\). In order to derive quantitative error estimates it is obvious that approximation results for \(S\) for functions with higher Sobolev regularity are required. The trace estimate (cf. (a)) allows us to “transfer” the local approximation results for the elements \(K\in \fancyscript{T}\) to the skeleton norm.
-
(c)
Adjoint approximation property \(\eta _{k}\left( S\right) \). The decomposition lemma formulated as Theorem 4.5 provides a regularity theory for Helmholtz problems that splits the solution into several contributions, each of which can be approximated by piecewise polynomials with error estimates that are explicit in \(h\), \(k\), and \(p\).
-
(d)
The constant \(C_{S}\) of (3.14). This condition ensures unique solvability of the discrete system (2.4) (see Theorem 3.8). For the important cases of polynomial \(hp\)-finite elements on affine, simplicial triangulations or plane wave approximation spaces, the condition (3.14) is automatically satisfied. If the adjoint approximation property can be controlled, then Theorem 3.10 provides an alternative way to ensure unique solvability for (2.4).
As an application of our abstract theory we considered the polynomial \(hp\)-finite elements, and we derived sharp stability and convergence estimates for non-conforming polynomial \(hp\)-finite element spaces. The a priori estimate in Theorem 4.10 is optimal in \(h\) (note that \(f\in H^{s}(\varOmega )\) with \(g\in H^{s+1/2}(\partial \varOmega )\) implies \(u\in H^{s+2}(\varOmega )\) by the assumed smoothness of \(\partial \varOmega \)) but suboptimal in \(p\) by half an order. This is typical in \(p\)-explicit DG methods. This suboptimality in \(p\) can be removed (in both the scale resolution condition (4.16) as well as the a priori estimate of Corollary 4.9) by assuming that the approximation space contains an \(H^{1}(\varOmega )\)-conforming subspace that is sufficiently rich. As an example, we considered the special case of meshes that are \(H^1\)-regular in Theorem 4.11 and the ensuing Remark 4.12. These results are formulated for meshes without handing nodes but we believe that similar results hold also for certain meshes with hanging nodes; the essential tool is the existence of an \(H^{1}(\varOmega )\)-conforming interpolant with appropriate approximation properties. Such a situation arises, e.g., if a conforming \(hp\)-finite element mesh is further refined locally in a controlled way by introducing hanging nodes.
We restricted the convergence analysis for polynomial \(hp\)-finite element spaces in Sect. 4 to Lipschitz domains with analytic boundaries in order not to further increase the technicalities in this paper. In [37], the case of polygonal domains for the standard variational formulation of the Helmholtz equation with conforming polynomial \(hp\)-finite element spaces was considered and regularity estimates in weighted Sobolev spaces were derived. We expect that the generalization of our theory for the DG method for non-conforming finite element spaces to polygonal domains is possible along those lines.
Notes
The DG method can also be formulated for geometries with curved boundaries.
To see this, e.g., for \(j=3\), we employ the interpolation inequality [36, (B.5)] to \(\nabla ^{3}u\) to obtain
$$\begin{aligned} \left\| \nabla ^{3}u\right\| _{L^{\infty }( \widehat{K}) }\le C\left\| \nabla ^{3}u\right\| _{L^{2}( \widehat{K}) }^{1-d/\left( 2\left( s-3\right) \right) }\left\| \nabla ^{3} u\right\| _{H^{s-3}( \widehat{K}) }^{d/\left( 2\left( s-3\right) \right) }\quad \forall u\in H^{s}( \widehat{K}) \end{aligned}$$since \(s>3+d/2\). The combination with (7.6) yields the desired bound in (7.7).
For a face \(f\), the face normal \(n_{f}:\partial f\rightarrow \mathbb S _{2}\) is defined to have length \(1\), lies in the plane of \(f\), and points to the exterior of \(f\). The face normal derivative on \(\partial f\) is then given by \(\partial _{n_{f}}:=\left\langle n_{f},\nabla \cdot \right\rangle \).
The condition \(p \ge j\) can be dropped if \(E_{1,e} u\) vanishes to higher order at the vertex (0,1) due to appropriate assumptions on the function \(w\).
References
Adams, R.A.: Sobolev Spaces. Academic Press, New York (1975)
Ainsworth, M., Monk, P., Muniz, W.: Dispersive and dissipative properties of discontinuous Galerkin finite element methods for the second-order wave equation. J. Sci. Comput. 27(1–3), 5–40 (2006)
Ainsworth, M.: Discrete dispersion relation for \(hp\)-version finite element approximation at high wave number. SIAM J. Numer. Anal. 42(2), 553–575 (2004)
Ainsworth, M., Wajid, H.: Dispersive and dissipative behavior of the spectral element method. SIAM J. Numer. Anal. 47(5), 3910–3937 (2009)
Babuška, I., Ihlenburg, F., Strouboulis, T., Gangaraj, S.K.: A posteriori error estimation for finite element solutions of Helmholtz’ equation. I. The quality of local indicators and estimators. Int. J. Numer. Methods Eng. 40(18), 3443–3462 (1997)
Bramble, J., Scott, R.: Simultaneous approximation in scales of Banach spaces. Math. Comput. 32, 947–954 (1978)
Buffa, A., Monk, P.: Error estimates for the Ultra Weak Variational Formulation of the Helmholtz Equation. Math. Model. Numer. Anal. 42, 925–940 (2008)
Cessenat, O., Després, B.: Application of an ultra weak variational formulation of elliptic PDEs to the two-dimensional Helmholtz equation. SIAM J. Numer. Anal. 35, 255–299, 1594–1607 (1998)
Cessenat, O., Després, B.: Using plane waves as base functions for solving time harmonic equations with the ultra weak variational formulation. J. Comput. Acoust. 11, 227–238 (2003)
Cummings, P., Feng, X.: Sharp regularity coefficient estimates for complex-valued acoustic and elastic Helmholtz equations. Math. Models Methods Appl. Sci. 16(1), 139–160 (2006)
Demkowicz, L.: Polynomial exact sequences and projection-based interpolation with applications to Maxwell’s equations. In: Boffi, D., Brezzi, F., Demkowicz, L., Durán, L.F., Falk, R., Fortin, M. (eds.) Mixed Finite Elements, Compatibility Conditions, and Applications. Lectures Notes in Mathematics, vol. 1939. Springer, Berlin (2008)
Demkowicz, L., Kurtz, J., Pardo, D., Paszyński, M., Rachowicz, W., Zdunek, A.: Computing with \(hp\)-adaptive finite elements. In: Chapman & Hall/CRC Applied Mathematics and Nonlinear Science Series, Vol. 2. Chapman & Hall/CRC, Boca Raton, FL. Frontiers: three dimensional elliptic and Maxwell problems with applications (2008)
Deraemaeker, A., Babuška, I., Bouillard, P.: Dispersion and pollution of the FEM solution for the Helmholtz equation in one, two and three dimensions. Int. J. Numer. Meth. Eng. 46, 471–499 (1999)
Després, B.: Sur une formulation variationelle de type ultra-faible. C.R. Acad. Sci. Paris Ser. I 318, 939–944 (1994)
Esterhazy, S., Melenk, J.M.: On stability of discretizations of the Helmholtz equation. In: Graham, I.G., Hou, T.Y., Lakkis, O., Scheichl, R. (eds.) Numerical Analysis of Multiscale Problems. Lecture Notes in Computational Science and Engineering, vol. 83, pp. 285–324. Springer, Berlin (2012)
Esterhazy, S., Melenk, J.M.: An analysis of discretizations of the Helmholtz equation in \(L^2\) and negative norms. ASC-report 31/2012. Institute for Analysis and Scientific Computing. Vienna University of Technology (2012)
Grigoroscuta-Strugaru, M., Amara, M., Calandra, H., Djellouli, R.: A modified discontinuous Galerkin method for solving efficiently Helmholtz problems. Commun. Comput. Phys. 11(2), 335–350 (2012)
Grisvard, P.: Elliptic Problems in Nonsmooth Domains. Pitman, Boston (1985)
Feng, X., Wu, H.: Discontinuous Galerkin methods for the Helmholtz equation with large wave number. SIAM J. Numer. Anal. 47(4), 2872–2896 (2009)
Feng, X., Wu, H.: \(hp\)-discontinuous Galerkin methods for the Helmholtz equation with large wave number. Math. Comput. 80, 1997–2024 (2011)
Feng, X., Xing, Y.: Absolutely stable local discontinuous Galerkin methods for the Helmholtz equation with large wave number. Math. Comput. 82, 1269–1296 (2013)
Georgoulis, E., Hall, E., Melenk, J.M.: On the suboptimality of the \(p\)-version interior penalty discontinuous galerkin method. J. Sci. Comput. 42(1), 54–67 (2010)
Gittelson, C.J., Hiptmair, R., Perugia, I.: Plane wave discontinuous Galerkin methods: Analysis of the \(h\)-version. Math. Model. Numer. Anal. 43, 297–331 (2009)
Gordon, W.J., Hall, ChA: Construction of curvilinear co-ordinate systems and applications to mesh generation. Int. J. Numer. Methods Eng. 7, 461–477 (1973)
Gordon, W.J., Hall, C.A.: Transfinite element methods: blending function interpolation over arbitrary curved element domains. Numer. Math. 21, 109–129 (1973)
Harari, I.: A survey of finite element methods for time-harmonic acoustics. Comput. Methods. Appl. Mech. Eng. 195(13–16), 1594–1607 (2006)
Harari, I., Hughes, T.J.R.: Galerkin/least-squares finite element methods for the reduced wave equation with non-reflecting boundary conditions in unbounded domains. Comput. Methods. Appl. Mech. Eng. 98(3), 411–454 (1992)
Hiptmair, R., Moiola, A., Perugia, I.: Plane Wave Discontinuous Galerkin Methods for \(2D\) Helmholtz equation: analysis of the \(p\)-version. SIAM J. Numer. Anal. 49, 264–284 (2011)
Huttunen, T., Monk, P.: The use of plane waves to approximate wave propagation in anisotropic media. J. Comput. Math. 25, 350–367 (2007)
Ihlenburg, F.: Finite Element Analysis of Acoustic Scattering, vol. 132. Applied Mathematical Sciences. Springer, New York (1998)
Ihlenburg, F., Babuška, I.: Dispersion analysis and error estimation of Galerkin finite element methods for the Helmholtz equation. Int. J. Numer. Methods Eng. 38(22), 3745–3774 (1995)
Ihlenburg, F., Babuška, I.: Finite element solution of the Helmholtz equation with high wavenumber part II: the h-p-version of the FEM. SIAM J. Numer. Anal. 34, 315–358 (1997)
Löhndorf, M., Melenk, J.M.: Wavenumber-explicit \(hp\)-BEM for high frequency scattering. SIAM J. Numer. Anal. 49(6), 2340–2363 (2011)
Melenk, J.M.: On Generalized Finite Element Methods. PhD thesis, University of Maryland at College Park (1995)
Melenk, J.M.: Mapping properties of combined field Helmholtz boundary integral operators. SIAM J. Math. Anal. 44(4), 2599–2636 (2012)
Melenk, J.M., Sauter, S.: Convergence analysis for finite element discretizations of the Helmholtz equation with Dirichlet-to-Neumann boundary condition. Math. Comput. 79, 1871–1914 (2010)
Melenk, J.M., Sauter, S.: Wavenumber explicit convergence analysis for finite element discretizations of the Helmholtz equation. SIAM J. Numer. Anal. 49, 1210–1243 (2011)
Monk, P., Wang, D.Q.: A least squares methods for the Helmholtz equation. Comput. Meth. Appl. Mech. Eng. 175, 121–136 (1999)
Olver, F.W.J.: Asymptotics and Special Functions. Academic Press, New York (1974)
Parsania, A.: Convergence analysis for finite element discretizations of highly indefinite problems. Doctoral thesis, Institut für Mathematik, Universität Zürich (2012)
Schatz, A.: An observation concerning Ritz–Galerkin methods with indefinite bilinear forms. Math. Comput. 28, 959–962 (1974)
Schwab, C.: p- and hp-Finite Element Methods. Oxford University Press, New York (1998)
Triebel, H.: Interpolation theory, function spaces, differential operators, 2nd edn. Johann Ambrosius Barth, Heidelberg (1995)
Wu, H.: Pre-asymptotic error analysis of CIP-FEM and FEM for Helmholtz equation with high wave number. Part I: linear version. Technical report (2011)
Zhu, L., Wu, H.: Pre-asymptotic error analysis of CIP-FEM and FEM for Helmholtz equation with high wave number. Part II: \(hp\) version. Technical report (2009)
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Details for the Proof of Theorem 4.5
We start with an extension of [37, Lemma 4.6] for the modified Helmholtz equation.
Lemma 6.1
Let \(\varOmega \) be a bounded Lipschitz domain with a smooth boundary. Let \(S_{k}^{\varDelta }\) be the solution operator for the boundary value problem
Then, for every \(s\in \mathbb{N }_{0}\) there exists \(C>0\) independent of \(k\ge k_{0}\) such that
Proof
The case \(s=0\) in (6.1) as well as the estimate (6.2) is given in [37, Lemma 4.6]. For \(s\ge 1\), we employ induction and the standard shift theorem for the Laplacian: Since \(u\) solves
we have
where we used a trace inequality. Using the induction hypothesis then leads to an estimate that involves norms of \(g\) other than \(\Vert g\Vert _{H^{s+3/2} (\partial \varOmega )}\) and \(\Vert g\Vert _{L^{2}(\partial \varOmega )}\). These can be removed by an interpolation inequality (see, e.g., [18, Thm. 1.4.3.3 ]) and an appropriate use of the Young inequality. \(\square \)
The analog of [37, Lemma 4.7] is the following (we use the operator \(H_{\partial \varOmega }^{N}\) defined in [37, (4.1c)]):
Lemma 6.2
Let \(\varOmega \) be a bounded Lipschitz domain with a smooth boundary. Fix \(q\in (0,1)\) and \(s\in \mathbb{N }_{0}\). Then, the operator \(H_{\partial \varOmega }^{N}\) can be selected such that the operator \(S_{k} ^{\varDelta }\circ H_{\partial \varOmega }^{H}\) satisfies for some \(C>0\) independent of \(k\)
Proof
Estimates (6.3) and (6.4) are shown in [37, Lemma 4.7] for the special case \(s=0\). For \(s\ge 1\), these estimates are derived as in [37, Lemma 4.7] by combining Lemma 6.1 with [37, Lemma 4.2]. We illustrate the procedure for the second term of the left-hand side of (6.3) for the case \(s\ge 2\): Lemma 6.1 yields
where we used [37, Lemma 4.2]. Rearranging terms yields the result. \(\square \)
We also need properties of the Newton potential \(N_{k}\), which generalize [37, Lemma 4.5]:
Lemma 6.3
Let \(\varOmega \) be a bounded Lipschitz domain. Fix \(s\in \mathbb{N }_{0}\) and \(q\in (0,1)\). Then the operator \(H_{\varOmega }\) of [37, (4.1b)] can be selected such that for \(0\le s^{\prime }\le s+2\)
Proof
Follows from the procedure in [37]; see also [35, Lemma 4.2]. The essential point is that [36, (3.35)] can be generalized (by using the notation therein) to
for all \(\alpha \in \mathbb N _{0}^{d}\) and \(\beta \in \mathbb N _{0}^{d}\). By selecting \(\vert \alpha \vert =s^{\prime }\) and \(\vert \beta \vert =s^{\prime }-2\), we see that \(\vert \alpha -\beta \vert =2\) and this case is considered in [36, (3.35)]. By performing the same estimates as in [36, after (3.35)], we derive for \(\vert \alpha -\beta \vert =2\) the estimate
so that
follows. The combination with [37, Lemma 4.2] leads to the assertion (6.5). \(\square \)
The next lemma generalizes [37, Lemma 4.15] (note that the boundary condition (1.2) differs from that in [37] by a sign):
Lemma 6.4
Let \(\varOmega \) be a bounded Lipschitz domain with a smooth boundary. Fix \(s\in \mathbb{N }_{0}\). Assume that the solution operator \((f,g)\mapsto S_{k}(f,g)\) for (1.1), (1.2) satisfies (4.4). Then \(S_{k}\) admits the following decomposition: \(u=S_{k}(f,0)=u_{\fancyscript{A}}+u_{H^{s+2}}+\widetilde{u}\), where
for constants \(C\), \(\gamma >0\) independent of \(k\) and \(n\), and the remainder \(\widetilde{u}=S_{k}(\widetilde{f},0)\) satisfies the boundary value problem
for a right-hand side \(\widetilde{f}\in H^{s}(\varOmega )\) with
Proof
The proof follows that of [37, Lemma 4.15]. We flag that the boundary condition (1.2) studied in the present paper differs from that in [37], which accounts for sign differences between the procedure here and in [37, Lemma 4.15]. We only need to show the additional bound \(\Vert u_{H^{s+2}}\Vert _{H^{s+2}(\varOmega )}\le C\Vert f\Vert _{H^{s}(\varOmega )}\). To that end, we have to consider, in the notation of [37, Lemma 4.15], the terms
For (6.6), we use Lemma 6.3 to get
This implies in particular with a trace inequality that
so that also for (6.7), we can obtain, with the aid of Lemma 6.2, the bounds
From the above estimates follows the bound for \(\Vert u_{H^{s+2}} \Vert _{H^{s+2}(\varOmega )}\). The estimate for \(\widetilde{f}\) follows also from the above observations by noting that we have to set \(\widetilde{f} :=2k^{2}u_{H^{2}}^{II}\) and then suitably adjust \(q\) as in the proof [37, Lemma 4.15]. \(\square \)
Finally, we formulate the analog of [37, Lemma 4.16]:
Lemma 6.5
Assume the hypotheses of Lemma 6.4. Fix \(q\in (0,1)\) and \(s\in \mathbb{N }_{0}\). Then the solution \(u=S_{k}(0,g)\) can be written as \(u=u_{\fancyscript{A}}+u_{H^{s+2}}+\widetilde{u}\), where
where the constants \(C\), \(\gamma >0\) are independent of \(k\) and \(n\). The remainder \(\widetilde{u}\) satisfies the boundary value problem
for data \(\widetilde{g}\in H^{s+1/2}(\partial \varOmega )\) with
Proof
The proof follows [37, Lemma 4.16], and we will only discuss (6.10). Again, we mention the sign difference between the boundary condition (1.2) and that studied in [37]. We have to consider, in the notation of [37, Lemma 4.16], the terms
For the term in (6.11), we use Lemma 6.2 to get
For the term in (6.12), we use Lemma 6.3 to arrive at
As in the proof of [37, Lemma 4.16], we then set \(\widetilde{g}:=-\mathrm{i}ku_{H^{2}}^{II}-\partial _{n}u_{H^{2}}^{II}\) and use the above estimates to get with the trace inequality
Suitably adjusting the constant \(q\) yields the result. \(\square \)
Appendix 2: \(H^{1}\)-Conforming Approximation
In this appendix we construct an \(H^{1}\)-conforming approximation operator that features optimal rates of convergence not only in \(L^2\) and \(H^1\) but also for the trace and the normal derivative on the element boundaries. This operator can be constructed in an element-by-element fashion. That is, its value at the geometric entities (vertices, edge, faces, elements) is only determined by the function values at these entities. Our construction is closely related to the projection-based interpolation of [11] and the construction in [36, Appendix 2]. In contrast to [36, Appendix 2], where optimal rates in \(L^{2}\) and \(H^{1}\) were sought, we ensure that the optimal rate of convergence for the trace of the gradient is also achieved. We stress that our construction is done with a view to simplicity rather than minimal regularity assumptions.
Definition 7.1
(element-by-element construction in 2D) Let \(\widehat{K}\) be the reference triangle. Let \(s>5/2\). A polynomial \(\pi \) is said to permit an element-by-element construction of boundary polynomial degree \(p \ge 7\) for \(u\in H^{s}(\widehat{K})\) if
-
(i)
\(\pi (V)=u(V)\) for all \(d+1\) vertices \(V\) of \(\widehat{K}.\)
-
(ii)
For every edge \(e\) of \(\widehat{K}\), the restriction \(\pi |_{e}\in {\fancyscript{P}}_{p}\) is the unique minimizer of
$$\begin{aligned} \pi \mapsto p^{2}\Vert u-\pi \Vert _{L^{2}(e)}+p \vert u - \pi \vert _{H^{1}(e)} + \vert u-\pi \vert _{H^{2}(e)} \end{aligned}$$(7.1)under two constraints: first, \(\pi \) satisfies (i) and second, the derivative (along \(e\)) of \(u-\pi \) vanishes in the endpoints of \(e\) (i.e., \((u - \pi )|_e \in H^2_0(e)\)).
Definition 7.2
(element-by-element construction in 3D) Let \(\widehat{K}\) be the reference tetrahedron. Let \(s>5\). A polynomial \(\pi \) is said to permit an element-by-element construction of edge polynomial degree \(p\ge 10\) and face polynomial degree \(2p\) for \(u\in H^{s}(\widehat{K})\) if
-
(i)
\(\pi (V)=u(V)\) for all \(d+1\) vertices \(V\) of \(\widehat{K}.\)
-
(ii)
For every edge \(e\) of \(\widehat{K}\), the restriction \(\pi |_{e}\in {\fancyscript{P}}_{p}\) is the unique minimizer of
$$\begin{aligned} \pi \mapsto p^{4} \sum _{j=0}^{4} p^{-j} \vert u-\pi \vert _{H^{j}(e)} \end{aligned}$$(7.2)under two constraints: first, \(\pi \) satisfies (i) and second, the tangential derivatives (along \(e\)) up to order \(3\) vanish in the endpoints of \(e\) (i.e., \((u-\pi )|_e\in H_{0}^{4}(e)\)).
-
(iii)
For every face \(f\) of \(\widehat{K}\), the restriction \(\pi |_{f}\in {\fancyscript{P}}_{2p}\) is the unique minimizer of
$$\begin{aligned} \pi \mapsto p^{4}\sum _{j=0}^{4}p^{-j}\left| u-\pi \right| _{H^{j}(f)} \end{aligned}$$(7.3)under two constraints: first, \(\pi \) satisfies (i), (ii) for all vertices and edges of \(f\) and second, the mixed derivatives of \(u-\pi \) vanish in the vertices, i.e., \(\partial _{e_{1}} \partial _{e_{2}}(u-\pi )(V)=0\) for each vertex \(V\) of \(f\), where \(e_{1}\), \(e_{2}\) are two tangential vectors associated with the edges \(e_{1}\), \(e_{2}\) of the face \(f\) that meet in \(V\).
Theorem 7.3
Let \(\widehat{K}\) be the reference triangle or the reference tetrahedron. Set \(V_{p}:=\{v\in {\fancyscript{P}} _{2p}\,|\,v|_{e}\in {\fancyscript{P}}_{p} \text{ for } \text{ all } \text{ edges } e\}\) if \(d=2\) and \(V_{p}:=\{v\in {\fancyscript{P}}_{4p+1}\,|\,v|_{f}\in {\fancyscript{P}}_{2p} \text{ for } \text{ all } \text{ faces } f,v|_{e}\in {\fancyscript{P}}_{p} \text{ for } \text{ all } \text{ edges } e \}\) if \(d=3\). Assume \(s>5/2\) if \(d=2\) and \(s>5\) for \(d=3\). Then, for \(p\ge \max \{10,s-1\}\) for \(d=3\) and \(p\ge \max \{7,s-1\}\) for \(d=2\), there exists a linear operator \(\pi :H^{s}(\widehat{K})\rightarrow V_{p}\) that permits an element-by-element construction in the sense of Definition 7.1 (for \(d=2\)) or Definition 7.2 (for \(d=3\)) such that
The constant \(C>0\) depends only on \(s\).
Proof
We will only present the arguments for the case \(d=3\). We construct \(\pi ( u ) \) directly—inspection of the proof shows that \(u\mapsto \pi \left( u\right) \) is a linear operator. To begin with, we mention that the condition \(p \ge 10\) ensures that an element-by-element construction in the form of Definition 7.2 is feasible: Taking in Lemma 7.13 \(i = 3\) (and the parameter \(p\) there as \(p = i+1 = 4\)) one can find a polynomial of degree \(p^\prime = 2i+p = 10\) that coincides with \(u\) and all its derivatives up to order \(i=3\) in all vertices.
Before actually embarking on the proof, we note a trace estimate that will be required frequently, namely, for any edge \(e\) of the tetrahedron \(\widehat{K} = \widehat{K}^{3D}\), we have for arbitrary but fixed \(t > 1\)
this embedding can be shown with appropriate trace estimates \(e \rightarrow f \rightarrow \widehat{K}\) or by combining the continuity assertion for the trace mapping of [43, Thm. 2.9.3] with interpolation inequalities (cf. also the proof of [36, Lemma B.3] where a similar argument is employed).
From [36, Lemma B.3] we have an approximation \(\pi ^{0}\in {\fancyscript{P}}_{p}\) with
Also, [36, Lemma B.3] gives the following \(L^{\infty }\)-estimate and, by a similar reasoning, also an \(L^{\infty }\)-estimates for the derivatives up to order 3:Footnote 2
Vertex Correction. With the vertex liftings of Lemma 7.13 we can construct a polynomial \(\pi ^{1} \in {\fancyscript{P}}_{p}\) with the following properties:
To see this, we employ the vertex liftings \(E^{3D}_{V}\) of Remark 7.14. Specifically, we fix a vertex \(V\) and take in Remark 7.14 the parameter \(q = 3\) and the parameter \(p\) there as \(p-6\) to obtain the polynomial
By construction in Remark 7.14, the polynomial \(\widetilde{\pi }_{1}\) satisfies \(D^{\beta }(u - \widetilde{\pi }_{1})(V) = 0\) for \(|\beta | \le 3\) and, by (7.37),
Proceeding in this way for all vertices yields a polynomial \(\pi ^{1} \in {\fancyscript{P}}_{p}\) with the properties (7.8), (7.9).
The condition (7.9) implies in particular that \(u-\pi ^{1}\in H_{0}^{4}(e)\) and \(\nabla (u-\pi ^{1})\in H_{0}^{3}(e)\) for each edge \(e\). With the trace estimates (7.5) we get from (7.8) the following estimates on edges:
Edge Correction I. Fix an edge \(e\). Since \(\pi ^{1}\) satisfies both side constraints in Definition 7.2.(ii), the minimizer \(\pi _{e}\) of (7.2) satisfies by (7.10)
We note that the difference \(\pi _{e}-\pi ^{1}|_{e}\) is a polynomial of degree \(p\) and \(\partial _{e}^{j}(\pi _{e}-\pi ^{1})\) vanishes at the endpoints of \(e\) for \(j\in \{0,1,2,3\}\), i.e., \(\pi _{e}-\pi ^{1}\in H_{0}^{4}(e)\cap {\fancyscript{P} }_{p}\). By writing \(\pi ^{1}-\pi _{e}=\left( \pi ^{1}-u\right) +\left( u-\pi _{e}\right) \) we obtain with the triangle inequality
With the aid of Lemma 7.15 we can find an edge lifting \(L_{e}:=E_{1,e}^{3D}\left( \pi ^{1}-\pi _{e}\right) \in {\fancyscript{P} }_{2p}\) (take as the parameter \(p\) in the statement of Lemma 7.15 the value \(p-1\)) to correct the discrepancy \(\pi ^{1}-\pi _{e}\) with the following propertiesFootnote 3:
With the aid of such a lifting for each edge \(e\), we can find a polynomial \(\pi ^{2}\in {\fancyscript{P}}_{2p}\) with
and the following two additional properties:
In other words, \(\pi ^{2}\) satisfies conditions (i), (ii) of Definition 7.2.
Relation to face minimizer \(\pi _{f}\). For a face \(f\), we denote by \(\pi _{f}\) the polynomial that is obtained by the minimizing procedure (7.3). We claim that
To see this, we estimate the error of a modification of \(\pi ^{2}\). An interpolation inequality and estimate (7.12) imply
We note that the polynomial \(\pi ^{2}\) coincides with \(\pi _{e}\) for each edge \(e\) of \(\partial f\). The second order mixed derivatives of \((u-\pi ^{2})|_{f}\) may not vanish at the vertices. This can be corrected with a lifting of Lemma 7.13. Specifically, for each vertex \(V\) Lemma 7.13 provides a lifting \(L_{V}\in {\fancyscript{P} }_{p}\) (take the parameter \(p\) in Lemma 7.13 as \(p-4\)) that vanishes on \(\partial f\) such that the mixed derivative at \(V\) equals 1 and
where we used appropriate trace theorems again. Combining this with (7.16), we can construct a function \(\widetilde{\pi }_{f}\) that satisfies all the desired constraints on \(\partial f\) and at the vertices of \(f\) and additionally the estimate
where we used (7.12) to control \(u-\pi ^{2}\). We conclude for the minimizer \(\pi _{f}\) that (7.15) holds.
Edge Correction II The minimizer \(\pi _{f}\) satisfies
where the subscript \(f\) in \(D_{f}^{\beta }\) indicates that differentiation is taken in the plane given by \(f\). The observations (7.14), (7.17), and (7.9) ensure that for each face \(f\) and each edge \(e\) of \(f\), we have \(\partial _{n_{f}}(\pi _{f}-\pi ^{2})|_{e} =\partial _{n_{f}}(\pi _{f}-\pi ^{1})|_{e}=\partial _{n_{f}}(\pi _{f} -u)|_{e}+\partial _{n_{f}}(u-\pi ^{1})|_{e}\in H_{0}^{2}(e)\). With the trace estimate (7.5) we get from (7.15) and (7.12)
We are now in position to construct for each face a lifting \(L_{f} \in {\fancyscript{P}}_{3p+1}\) (which is composed of liftings \(E_{2,e}^{3D}\left( \left. \partial _{n_{f}}(\pi ^{2}- \pi _{f})\right| _{e}\right) \) with the lifting operator \(E_{2,e}^{3D}\) of Lemma 7.16 ) with the following properties:
With these liftings, we may adjust \(\pi ^{2}\) to produce a polynomial \(\pi ^{3}\in {\fancyscript{P}}_{3p+1}\) with
Face Correction. In view of \(\pi ^{3}-\pi _{f}\in H_{0}^{2}(f)\) we may use the final face lifting of Lemma 7.17 to produce a polynomial \(\pi ^{4}\in {\fancyscript{P}}_{4p+1}\) to enforce the desired behavior on the faces. Since \(\left. \pi ^{4}\right| _{f}=\pi _{f}\) for all faces, it satisfies the conditions of Definition 7.2 and additionally
Volume correction. As a final step, we replace \(\Vert u\Vert _{H^{s}(\widehat{K})}\) on the right-hand side of (7.24) by the seminorm \(|u|_{H^{s} (\widehat{K})}\) with the classical compactness argument due to Deny-Lions. Specifically, we take \(\pi \left( u\right) \in {\fancyscript{P}}_{4p+1}\) as the minimizer of
under the constraint that \(v|_{\partial \widehat{K}}=\pi ^{4}|_{\partial \widehat{K}}\). Then \(u\mapsto \pi \left( u\right) \) is a projection on the space \(V_{p}\) (as defined in the theorem) and the full norm \(\Vert u\Vert _{H^{s}(\widehat{K})}\) can be replaced with \(|u|_{H^{s}(\widehat{K})}\) for \(p\ge s-1\). \(\square \)
Corollary 7.4
Let \({\fancyscript{T}}\) be an \(H^1\)-regular mesh in the sense of the beginning of Sect. 4.2.2 and \(S = S^{p,1}({\fancyscript{T}})\) be the space of piecewise mapped polynomials of degree \(p\) on \({\fancyscript{T}}\). Let \(s > 5/2\) for \(d = 2\) and \(s > 5\) for \(d = 3\). Then, for every \(p\ge s-1\) there exists a linear operator \(I:H^{s}(\varOmega )\rightarrow S\cap H^{1}(\varOmega )\) such that for all \(K\in {\fancyscript{T}}\)
Proof
For large \(p\), we use the operator constructed in Theorem 7.3. For example, for \(d = 3\) and \(p^\prime \ge \max \{10,s-1\}\) with \(p^\prime := \lfloor (p-1)/4\rfloor \), we can define \(Iu\) on the reference element \(\widehat{K}\) by taking the operator constructed in Theorem 7.3 (with \(p^\prime \) taking the role of \(p\) there); this yields the desired estimates in \(p\) and the appropriate powers of \(h_K\) arise from scaling arguments (cf. Lemma 4.7). If \(p^\prime < \max \{10,s-1\}\), this corresponds to finitely many possible values of \(p\) and the \(p\)-dependence in the desired estimate is irrelevant. We take \(Iu\) as any standard Lagrange interpolation operator and obtain the required \(h_K\)-dependence again by the scaling arguments of Lemma 4.7. \(\square \)
1.1 Lifting Operators
1.1.1 Preliminaries
We start with a convenient definition of the reference triangle \(\widehat{K}^{2D}\) and the reference tetrahedron \(\widehat{K}^{3D}\):
Below, we will frequently require the following asymptotics of the Beta function \(B\) for \(\alpha > -1\) and \(p \ge 0\) (cf., e.g., [39, Secs. 1.6, 5.1]):
We need a preliminary result that will prove useful for the construction of various vertex liftings:
Lemma 7.5
For \(q\in \mathbb{N }\) define on (0,1) the function \(L_{q}(r):=(1-r)^{q}\). Fix \(i\in \mathbb{N }_{0}\). Then there exists a polynomial \(\pi _{i}\in {\fancyscript{P}}_{i}\) of the form
and a constant \(C_{i}\) (which depends solely on \(i\)) with the following properties:
Furthermore, the polynomial \(\pi _{i}L_{q}\) satisfies, for every \(a\in [0,1]\), \(\alpha \ge 0\), and every \(s\in \mathbb{N }_{0}\)
The constant \(C_{s,i,\alpha }\) depends only on \(s\), \(\alpha \), and \(i\).
Proof
The polynomials \(\pi _{i}\) can be defined inductively. We take \(\pi _{0}\equiv 1\). For \(\pi _{i+1}\) we make the ansatz \(\pi _{i+1}(r)=\pi _{i}(r)+\alpha _{i+1}r^{i+1}\). This implies for \(0\le m\le i\) that \(\left( \pi _{i+1}L_{q}\right) ^{\left( m\right) } \left( 0\right) =\left( \pi _{i}L_{q}\right) ^{\left( m\right) }\left( 0\right) \). The unknown coefficient \(\alpha _{i+1}\) is then determined by the condition
Since \(L_{q}^{(j)}(0)=(-1)^{j}\left( {\begin{array}{c}q\\ j\end{array}}\right) j!\) we get \(|L_{q}^{(j)}(0)|\le Cq^{j}\) for a constant \(C>0\) independent of \(q\in \mathbb{N }\). In view of \(\pi _{i}^{(j)}(0)=\alpha _{j}q^{j}j!\), the claimed estimate follows for \(\alpha _{i+1}\) by induction and (7.27). We finally show (7.28 ). For simplicity of notation, let \(q\ge s+1\). Since \(r^{\alpha }(\pi _{i}L_{q})^{(s)}\) consists of terms of the form \(\left( \left( 1-r\right) ^{q}(qr)^{j}\right) ^{\left( s\right) }r^{\alpha }\), the product rule shows that it consists of terms of the form \(\left( \left( 1-r\right) ^{q}\right) ^{\left( s-k\right) }\left( (qr)^{j}\right) ^{\left( k\right) }r^{\alpha }\) which can be estimated from above by
With these constraints on \(j\) and \(k\), we estimate with the change of variables \(r=(1-a)\rho \)
Summation over all relevant \(j\), \(k\) gives the stated estimate. \(\square \)
We need a working lemma for the edge liftings in 2D and 3D:
Lemma 7.6
Consider \(\widehat{K}^{2D}\) and its edge \(e=(-1,1)\times \{0\}\). Let \(j\in \{0,1,2,3,4\}\). Let \({\fancyscript{V}}\) be the set of vertices of \(\widehat{K}^{2D}\) and \(d_{\fancyscript{V}}:=\mathrm{dist}(\cdot ,{\fancyscript{V}})\) be the distance from the vertices. Let \(w\in C^{\infty }(\mathbb{R }^{4})\). Let \(\alpha \in \mathbb{N }_{0}\). Then there is \(C>0\) such that for every \(p\ge 0\) the map \(E_{1,e}:H_{0}^{j}(e)\rightarrow H^{j}(\widehat{K}^{2D})\) given by
satisfies:
Furthermore, if \(0\le \alpha \le j\) and \(0\le i\le j\) and additionallyFootnote 4 \(p \ge j\)
for any simplex edge \(e^{\prime }\). In particular, therefore, \(E_{1,e}u\in H_{0}^{j}(e^{\prime })\) for every edge if \(p \ge j\).
Proof
We start with the proof of (7.29). Without explicitly stating it below, we will assume that \(p\) is sufficiently large (specifically, \(p\ge 2\)). For the case \(j=0\), (7.29) follows from the observation that \(w\) is a bounded function on \(\widehat{K}^{2D}\) since \(y/(1-|x|)\le 1\) on \(\widehat{K}^{2D}\) and the estimate (7.27). For the cases \(j\ge 1\), we have to control the derivatives. We use \(0<y<1-|x|\) and the smoothness of \(w\) to estimate
for arbitrary multiindices \(\beta \in \mathbb{N }_{0}^{2}\) and \(p\ge |\beta |\). Recall that \(i\mapsto a^{i}\) is convex for \(i\in \mathbb{N }_{0}\) and \(a>0\). From the product rule, we therefore infer for fixed \(\beta \in \mathbb{N } _{0}^{2}\) and \(p\ge |\beta |\)
(7.33) thus allows us to control the derivatives of the function \(W\) defined as
We now consider the case \(j=1\) and \(|\beta |=1\). Then Lemma 7.8 gives
where, in the last step, we employed the Hardy inequality of Lemma 7.7 (with \(\beta =-2\) there). We now consider \(j=2\). Then, we have to bound \(\Vert uD^{\beta }W\Vert _{L^{2}(\widehat{K}^{2D})}\) for \(|\beta |=2\), \(\Vert \partial _{x}uD^{\beta }W\Vert _{L^{2}(\widehat{K}^{2D})}\) for \(|\beta |=1\) and \(\Vert \partial _{x}^{2}uW\Vert _{L^{2}(\widehat{K}^{2D})}\). Writing \(D^{2}W\) and \(D^{1}W\) for the sum of all derivatives of order \(2\) and \(1\), respectively, we estimate
where, in the last step, we used again the Hardy inequality of Lemma 7.7 with the assumption \(\partial _{x}u(1)=0\). Estimating \(uD^{2}W\) requires us to control
The second term is readily bounded by \(p^{4-2\alpha -1}\Vert u\Vert _{L^{2} (e)}^{2}\). For the first term, an application of Lemma 7.8 yields
A two-fold application of the Hardy inequality Lemma 7.7 yields \(\Vert 1/(1-|x|)^{2}u\Vert _{L^{2}(e)}\le C\Vert \partial _{x}^{2}u\Vert _{L^{2}(e)}^{2}\), which is the desired estimate. The cases \(j=3\), 4 are shown with similar arguments.
For the estimate (7.30), we argue in a similar way. We focus on the case \(e^{\prime }\ne e\), the case \(e^{\prime }=e\) being slightly simpler. The assumption \(p \ge j\) implies that \(E_{1,e} u\) vanishes to higher order at the vertex (0,1). We may therefore concentrate on the behavior of \(E_{1,e} u\) at the vertices (\(-\)1,0) and (1,0). For example, for \(i=0\) we have to estimate terms of the following form (the contribution \((1-y)^{p}\) is generously estimated by 1) in view of (7.33):
where we observed that the factor \(y^{\alpha }\) arising in (7.33) is changed into \((1-|x|)\) due to the parametrization of \(e^{\prime }\). The integral (7.34) can then be treated with the Hardy inequality of Lemma 7.7. \(\square \)
From [43, Rem. 1, Sec. 3.2.6] we have the following variant of Hardy’s inequality:
Lemma 7.7
(Hardy inequality) For \(\beta <-1\) and \(\varphi \in C_{0}^{\infty }(0,1)\)
Lemma 7.8
Fix \(\alpha \ge 0\) and \(\beta \in \mathbb{R }\) with \(\alpha +\beta \ge 0\). There is some \(C>0\) independent of \(x\in (0,1)\) and \(p\ge 0\) such that
Proof
We may assume \(p\ge 2\). Both estimates follow by distinguishing between the cases \(x<1-1/p\) and \(1-1/p<x<1\); in the latter case, we use additionally (7.27). \(\square \)
Lemma 7.9
Let \(f \in L^{1}(\widehat{K}^{2D})\). Then
Proof
Follows from an appropriate application of Fubini’s theorem. \(\square \)
1.1.2 Liftings for the 2D Case
We start with vertex liftings that allow us to match the Taylor expansion in the vertices to any desired order.
Lemma 7.10
(vertex liftings in 2D) Fix \(i \in \mathbb{N }_{0}\) and a vertex \(V\) of \(\widehat{K}^{2D}\). Denote by \(e_{1}\), \(e_{2}\) the two edges meeting at \(V\) and by \(\partial _{e_{1}}\), \(\partial _{e_{2}}\) differentiation along \(e_{1}\), \(e_{2}\). Fix \((i_{1},i_{2}) \in \mathbb{N } _{0}^{2}\) with \(i_{1} + i_{2} \le i\). Then for \(p \ge i+1\) one can find polynomials \(L_{V,(i_{1},i_{2}),p} \in {\fancyscript{P}}_{p+2i}\) with
Furthermore \(L_{V,(i_{1},i_{2}),p}\) vanishes on the edge opposite \(V\) and for every \(s \ge 0\), one has for a constant \(C_{s} > 0\) independent of \(p\) (but depending on \(s\) and \(i\))
Proof
It is convenient to work with the reference triangle
Let \(L_{1,p}\in {\fancyscript{P}}_{p+i}\) be the univariate polynomial given by Lemma 7.5 with the property \(L_{1,p} ^{(j)}(0)=\delta _{j,0}\) for \(j=0,\ldots ,i\) and \(L_{1,p}^{(j)}(1) = 0\) for \(j=0,\ldots ,p-1\). Set
Since \(L_{1,p}(0)=1\) and \(L_{1,p}^{(j)}(0)=0\) for \(j=1,\ldots ,i\) and \(L_{1,p}^{(j)}(1)=0\) for \(j=0,\ldots ,p-1\ge i\), we see that \(L_{V,p}\) has the desired properties in the vertices of \(\widetilde{K}^{2D}\). To see the norm bounds, we consider \((s_{1},s_{2})\in \mathbb{N }_{0}^{2}\) with \(s_{1} +s_{2}=s\). Then, by the product rule, \(D^{(s_{1},s_{2})}L_{V,(i_{1},i_{2}),p}\) consist of terms of the form
Hence, we have to bound
With the aid of Lemma 7.5 in the first step and (7.27) in the second one, we get
which implies the desired estimate. \(\square \)
Lemma 7.11
(edge liftings in 2D) For every edge of \(\widehat{K}^{2D}\) and \(j \ge 1\) and \(p \in \mathbb{N }\) there is a bounded linear operator \(E_{1,e}^{2D}:L^{2}(e)\rightarrow L^{2}(\widehat{K}^{2D})\) with the following properties with a \(C>0\) independent of \(p\) and \(u\):
-
(i)
\(\Vert E_{1,e}^{2D}u\Vert _{L^{2}(\widehat{K}^{2D})}\le Cp^{-1/2}\Vert u\Vert _{L^{2}(e)}\).
-
(ii)
\(|E_{1,e}^{2D}u|_{H^{k}(\widehat{K}^{2D} )}\!\le \! Cp^{{-}1/2}\left[ \! p^{k}\Vert u\Vert _{L^{2}(e)}{+}p^{k{-}1}\!\Vert \nabla _{e}u\Vert _{L^{2}(e)}{+}\cdots {+}|u|_{H^{k}(e)}\!\right] \! \text{ if }\,\, \text{ additionally } \) \(u \in H^k_0(e)\).
Additionally, \(E_{1,e}^{2D} u\) has a trace on \(\partial \widehat{K}^{2D}\) and
-
(iii)
\((E_{1,e}^{2D}u)|_{e}=u.\)
-
(iv)
\((E_{1,e}^{2D}u)|_{\partial \widehat{K} ^{2D}\setminus e}=0\).
Furthermore, if \(u \in H^j_0(e)\), then
-
(v)
\(\forall u\in {\fancyscript{P}}_{q}\cap H_{0} ^{j}(e):E_{1,e}^{2D}u\in {\fancyscript{P}}_{p+q}\).
-
(vi)
\((\nabla ^{k} E_{1,e}^{2D}u)|_{\partial \widehat{K}^{2D}\setminus e}=0\), \(k=0,\ldots ,j-1\).
Proof
We consider the edge \(e=\{(x,y)\,|\,y=0\}\). The edge lifting for \(e\) is taken to be
Lemma 7.6 implies the norm bounds stated in (i), (ii), since \(E_{1,e}^{2D}u\) has the form studied there. The properties concerning the traces and derivatives on \(\partial \widehat{K}^{2D}\) given in (iii)—(vi) follow by inspection (and \(j > 0\)). \(\square \)
The following result is a variation of Lemma 7.11 and will be required for the 3D situation.
Lemma 7.12
Let \({\fancyscript{V}}\) be the vertices of \(\widehat{K}^{2D}\) and \(d_{\fancyscript{V}}:= \mathrm{dist}(\cdot ,{\fancyscript{V}})\). Then, for every edge \(e\) of \(\widehat{K}^{2D}\) and \(p \in \mathbb{N }\) there is a bounded linear operator \(E_{1,e}:L^{2}(e)\rightarrow L^{2}(\widehat{K}^{2D})\) with the following properties:
-
(i)
\(\Vert E_{1,e}u\Vert _{L^{2}(\widehat{K}^{2D})}\le Cp^{-1/2}\Vert u\Vert _{L^{2}(e)}\).
-
(ii)
\(|E_{1,e} u|_{H^{j}(\widehat{K}^{2D})}\le Cp^{-1/2}p^{j}\sum _{\ell =0}^{j}p^{-\ell }\Vert u\Vert _{H^{\ell }(e)}\) if \(u \in H^j_0(e)\), \(j \ge 0\).
-
(iii)
If \(u \in H^j_0(e)\) for a \(j \ge 1\), then \(E_{1,e}u|_{e^{\prime }}\in H_{0} ^{j}(e^{\prime })\) for every edge \(e^{\prime }\) of \(\widehat{K}^{2D}\) and in fact, for \(0\le i\le j \le p\),
$$\begin{aligned} \Vert d_{\fancyscript{V}}^{-(j-i)}\nabla ^{i}E_{1,e} u\Vert _{L^{2}(e^{\prime })}\le C p^{j} \sum _{k=0}^{j} p^{-k} |u|_{H^{k}(e)}. \end{aligned}$$
In the above estimates, the constant \(C>0\) is independent of \(u\) and \(p\). Additionally, if \(u \in H^3_0(e)\), then
-
(iv)
\(\forall u\in {\fancyscript{P}}_{q}\cap H_{0}^{3}(e):E_{1,e}u\in {\fancyscript{P}}_{p+q+1}\).
-
(v)
\((E_{1,e}u)|_{\partial \widehat{K} ^{2D}\setminus e}=0\).
-
(vi)
\((\nabla E_{1,e}u)|_{\partial \widehat{K}^{2D}\setminus e}=0\).
-
(vii)
\((E_{1,e}u)|_{e}=u\).
-
(viii)
\((\partial _{n}E_{1,e}u)|_{e}=0\).
Proof
We modify the operator \(E_{1,e}^{2D}\) of Lemma 7.11 slightly and set
The control of \(|E_{1,e}u|_{H^{j}(\widehat{K}^{2D})}\) stated in (i), (ii) follows from Lemma 7.6 by observing that \(2y/(1-x^2) = y/(1-x) + y/(1+x)\) so that \(E_{1,e}u=W_{1}u+pyW_{2}u\) with functions \(W_{1}\), \(W_{2}\) of the form studied in Lemma 7.6. Likewise, the bounds given in (iii) on edges \(e^{\prime }\) follow from Lemma 7.6 and the special form \(E_{1,e}u=W_{1}u+pyW_{2}u\). (In fact, the condition \(p\ge j\) on the degree \(p\) is not completely sharp.) The properties (iv)–(vii) result from the factor \((1-y/(1-x))^2 (1-y/(1+x))^2\). The property \((\partial _{n}E_{1,e}u)|_{e}=0\) is a consequence of the factor \(1+py+4y/(1-x^{2})\). \(\square \)
1.1.3 Liftings for the 3D Case
We start with the vertex liftings:
Lemma 7.13
(vertex liftings in 3D) Fix \(i\in \mathbb{N }_{0}\) and a vertex \(V\) of \(\widehat{K}^{3D}\). Denote by \(e_{1}\), \(e_{2}\), \(e_{3}\) the three edges meeting at \(V\) and by \(\partial _{e_{k}}\), differentiation along \(e_{k}\). Fix \((i_{1},i_{2},i_{3})\in \mathbb{N }_{0} ^{3}\) with \(i_{1}+i_{2}+i_{3}\le i\). Then one can find, for every \(p\ge i+1\), a polynomial \(L_{V,(i_{1},i_{2},i_{3}),p}\in {\fancyscript{P}}_{p+2i}\) with
Furthermore, \(L_{V,(i_{1},i_{2},i_{3}),p}\) vanishes on the face opposite \(V\). Additionally, for every \(s\ge 0\), one has for a constant \(C_{s}>0\) independent of \(p\) (but depending on \(s\) and \(i\))
Proof
The proof parallels that of the 2D-version detailed in Lemma 7.10. It is convenient to work with the reference tetrahedron
Let \(L_{1,p}\in {\fancyscript{P}}_{p+i}\) be the univariate polynomial given by Lemma 7.5 with \(L_{1,p}^{(j)}(0)=\delta _{j,0}\), \(j=0,\ldots ,i\) and \(L_{1,p}^{(j)}(1) = 0\) for \(j=0,\ldots ,p-1\). Set
Since \(L_{1,p}(0)=1\) and \(L_{1,p}^{(j)}(0)=0\) for \(j=1,\ldots ,i\) and \(L_{1,p}^{(j)}(1)=0\) for \(j=0,\ldots ,p-1\ge i\), we see that \(L_{V,p}\) has the desired properties in the vertices of \(\widetilde{K}^{3D}\). To see the norm bounds, we consider a \((s_{1},s_{2},s_{3})\in \mathbb{N }_{0}^{3}\) with \(s_{1}+s_{2}+s_{3}=s\). Then, by the product rule, \(D^{(s_{1},s_{2},s_{3} )}L_{V,(i_{1},i_{2},i_{3}),p}\) consist of terms of the form
where \((k_{1},k_{2},k_{3})\in \mathbb{N }_{0}^{3}\) is constrained to satisfy \(0\le k_{1}\le \min \{i_{1},s_{1}\}\), \(0\le k_{2}\le \min \{i_{2},s_{2}\}\), \(0\le k_{3}\le \min \{i_{3},s_{3}\}\). Hence, we have to bound
Abbreviating \(s=s_{1}+s_{2}+s_{3}\) and \(k=k_{1}+k_{2}+k_{3}\) we get with the aid of Lemma 7.5
For the innermost integral, we use the change of variables \(y=(1-x)\eta \) and get in view of (7.27)
Thus, we get
which is the claimed estimate. \(\square \)
Remark 7.14
(vertex liftings matching to finite order) Let \(s>0\) and \(q\in \mathbb{N }_{0}\) such that the embedding theorem \(H^{s}(\widehat{K}^{3D})\subset C^{q}(\overline{\widehat{K}})\) is valid. Define, for \(p\ge q+1\), with the aid of the functions of \(L_{V,(i_{1},i_{2},i_{3}),p}\) of Lemma 7.13 the operator
Then \(E_{V}^{3D}u\in {\fancyscript{P}}_{p+2q}\). Furthermore \(D^{\beta }(u-E_{V}^{3D}u)(V)=0\) for all \(|\beta |\le q\) and \((D^{\beta }E_{V} ^{3D}u)(V^{\prime })=0\) for all \(|\beta |\le q\) and vertices \(V^{\prime }\ne V\), and \(E_{V}^{3D}u\) vanishes on the face opposite \(V\). Additionally, for \(t\ge 0\), we have
For the following lemmas, we recall our notion of face normal derivative operator \(\partial _{n_f}\): For a face \(f\) of \(\widehat{K}^{3D}\) with boundary \(\partial f\), we denote by \(\partial _{n_f} v = n_f \cdot \nabla v\), where \(n_f\) is the vector of length \(1\) normal to \(\partial f\) in the plane spanned by \(f\).
Lemma 7.15
(edge trace lifting) For each edge \(e\) of \(\widehat{K}^{3D}\) denote by \(f_{1,e}\), \(f_{2,e}\) the two faces sharing \(e\). There is a lifting operator \(E_{1,e}^{3D}:H_{0}^{3}(e)\rightarrow H^{3}(\widehat{K}^{3D})\) with the following lifting properties:
-
(i)
\((E_{1,e}^{3D}u)|_{e}=u\).
-
(ii)
\(E_{1,e}^{3D}u\) vanishes on all faces that do not have \(e\) as an edge.
-
(iii)
\(E_{1,e}^{3D}u\) as well as \(\nabla E_{1,e}^{3D}u\) vanish on all edges except \(e\).
-
(iv)
For each of the two faces \(f_{1,e}\), \(f_{2,e}\), the face normal derivative of \(E_{1,e}^{3D}u\) vanish on \(e\), i.e.,
$$\begin{aligned} (\partial _{n_{f_{i,e}}} E_{1,e}^{3D} u)|_e = 0\; { for}\; i=1, 2. \end{aligned}$$ -
(v)
If \(u\in {\fancyscript{P}}_{q}\cap H_{0}^{3}(e)\), then \(E_{1,e} ^{3D}u\in {\fancyscript{P}}_{q+p+1}\).
For each fixed \(j \ge 0\), the following stability bounds are valid:
-
(vi)
\(\Vert E_{1,e}^{3D}u\Vert _{L^{2}(\widehat{K}^{3D})}\le Cp^{-1}\Vert u\Vert _{L^{2}(e)}\).
-
(vii)
If \(u \in H^j_0(e)\), then \(|E_{1,e}^{3D}u|_{H^{j}(\widehat{K}^{3D})}\le Cp^{-1}[ p^{j}\Vert u\Vert _{L^{2}(e)}+p^{j-1}|u|_{H^{1}(e)}+\cdots +|u|_{H^{j} (e)}] \).
-
(viii)
If \(u \in H^j_0(e)\), then for the faces \(f_{i,e}\), \(i\in \{1,2\}\),
$$\begin{aligned} |E_{1,e}^{3D}u|_{L^{2}(f_{i,e})}&\le Cp^{-1/2}\Vert u\Vert _{L^{2}(e)},\\ |E_{1,e}^{3D}u|_{H^{j}(f_{i,e})}&\le Cp^{-1/2}\left[ p^{j}\Vert u\Vert _{L^{2}(e)}+p^{j-1}|u|_{H^{1}(e)}+\cdots +|u|_{H^{j}(e)}\right] . \end{aligned}$$
Proof
Let \(e=(-1,1)\times \{0\}\times \{0\}\). With the operator \(E_{1,e}\) of Lemma 7.12 define \(E_{1,e}^{3D}\) by the formula
The statements (i)–(iv), about where \(E_{1,e}^{3D}u\) vanishes follows from the definition. The estimates (vii), follow from Lemma 7.12.(ii) and the simple observation that \(y=0\) or \(z=0\) for the faces \(f_{1,e}\), \(f_{2,e}\). For the volume bounds (v), (vi), we employ Lemma 7.9 and arguments similar to those of the 2D case in Lemma 7.6. \(\square \)
Lemma 7.16
(edge normal derivative lifting) For each edge \(e\) of \(\widehat{K}^{3D}\) denote by \(f_{1,e}\) and \(f_{2,e}\) the two faces that share the edge \(e\). There is a lifting operator \(E_{2,e}^{3D}:H_{0}^{2} (e)\rightarrow H^{2}(\widehat{K}^{3D})\) with the following properties:
-
(i)
\(E_{2,e}^{3D}u\) vanishes on \(\partial \widehat{K}^{3D}\setminus f_{1,e}.\)
-
(ii)
The face normal derivative \(\partial _{n_{f_{1,e}}} E_{2,e}^{3D} u\) satisfies
$$\begin{aligned} \partial _{n_{f_{1,e}}} (E_{2,e}^{3D}u)|_{e}=u \ \mathrm{and}\ \partial _{n_{f_{1,e}}}(E_{2,e}^{3D}u)|_{\partial f_{1,e}\setminus e}=0. \end{aligned}$$ -
(iii)
\(\Vert E_{2,e}^{3D}u\Vert _{L^{2}(\widehat{K}^{3D})}\le Cp^{-2}\Vert u\Vert _{L^{2}(e)}.\)
-
(iv)
\(|E_{2,e}^{3D}u|_{H^{2}(\widehat{K}^{3D})}\le Cp^{-2}\left[ p^{2}\Vert u\Vert _{L^{2}(e)}+p|u|_{H^{1}(e)}+|u|_{H^{2}(e)}\right] .\)
-
(v)
For the face \(f_{1,e}\), we have
$$\begin{aligned} |E_{2,e}^{3D}u|_{L^{2}(f_{1,e})}&\le Cp^{-2+1/2}\Vert u\Vert _{L^{2} (e)},\\ |E_{2,e}^{3D}u|_{H^{2}(f_{1,e})}&\le Cp^{-2+1/2}\left[ p^{2}\Vert u\Vert _{L^{2}(e)}+p|u|_{H^{1}(e)}+|u|_{H^{2}(e)}\right] . \end{aligned}$$ -
(vi)
If \(u\in {\fancyscript{P}}_{q} \cap H^{2}_{0}(e)\), then \(E_{2,e}u \in {\fancyscript{P}}_{q+p+1}\).
Proof
Let \(e=(-1,1)\times \{0\}\times \{0\}\) and let \(f_{1,e}=\{(x,y,z)\,|\,\partial \widehat{K}^{3D}\cap \{y=0\}\}\). With the operator \(E_{1,e}\) of Lemma 7.11 define \(E_{2,e}^{3D}\) by the formula
The statements (i), (ii) about where \(E_{2,e}^{3D}u\) vanishes follows from the definition. The estimates (v) follow by reasoning as in the proof of Lemma 7.11. In view of Lemma 7.9, we see that we can proceed with analogous arguments as in the 2D case to get the volume bounds of (iii), (iv). \(\square \)
We finally need a lifting from faces.
Lemma 7.17
(face lifting) For each face \(f\) of \(\widehat{K}^{3D}\) there is a lifting operator \(E_{f}^{3D}:H_{0}^{2}(f)\rightarrow H^{2}(\widehat{K}^{3D})\) with the following properties:
-
(i)
\((E_{f}^{3D}u)|_{\partial \widehat{K}^{3D}\setminus f}=0\).
-
(ii)
\((E_{f}^{3D}u)|_{f}=u\).
-
(iii)
\(\Vert E_{f}^{3D}u\Vert _{L^{2}(\widehat{K}^{3D})}\le Cp^{-1/2}\Vert u\Vert _{L^{2}(f)}\).
-
(iv)
\(|E_{f}^{3D}u|_{H^{2}(\widehat{K}^{3D})}\le Cp^{-1/2}\left[ p^{2}\Vert u\Vert _{L^{2}(f)}+p|u|_{H^{1}(f)}+|u|_{H^{2}(f)}\right] \).
-
(v)
If \(u\in {\fancyscript{P}}_{q}\cap H_{0}^{2}(f)\), then \(E_{f}^{3D} u\in {\fancyscript{P}}_{p+q}\).
Proof
Let \(f=\widehat{K}^{2D}\times \{0\}\). Define \(E_{f}^{3D}\) by
We focus on the bounds for the second derivatives of \(E_{f}^{3D}u\). We note that \(E_{f}^{3D}\) has the form
for a smooth function \(w\). Arguing as in the proof of Lemma 7.6 , we see that for multiindices \(\beta \in \mathbb{N }_{0}^{3}\), \(|\beta |\le 2\) we have by the smoothness of \(w\) and that fact that \(|z/(1-x-y)|\le 1\) as well as \(|z/(1+x-y)|\le 1\) on \(\widehat{K}^{3D}\)
With the product rule we get with the abbreviation \(d(x,y):=\mathrm{dist}((x,y),\partial \widehat{K}^{2D})\)
As in the proof of Lemma 7.6, we abbreviate \(D^{1}u\) and \(D^{2}u\) for the sum of all derivatives of order 1 and 2. From (7.38) we obtain with the product rule for differentiation and (7.40)
which concludes the proof. \(\square \)
Rights and permissions
About this article
Cite this article
Melenk, J.M., Parsania, A. & Sauter, S. General DG-Methods for Highly Indefinite Helmholtz Problems. J Sci Comput 57, 536–581 (2013). https://doi.org/10.1007/s10915-013-9726-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-013-9726-8
Keywords
- Helmholtz equation at high wavenumber
- Stability
- Convergence
- Discontinuous Galerkin methods
- Ultra-weak variational formulation
- Polynomial hp-finite elements