
Abstract
In the recent past, finding robust solutions for optimization problems contaminated with uncertainties has been topical and has been investigated in the literature for scalar and multi-objective/vector-valued optimization problems. In this paper, we introduce various types of robustness concept for set-valued optimization, such as min–max set robustness, optimistic set robustness, highly set robustness, flimsily set robustness, multi-scenario set robustness. We study some existence results for corresponding concepts of solution and establish some relationship among them.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Set-valued optimization has become a vibrant area of research with many applications such as in risk management [9, 10], multi-criteria decision making, social choice theory [25], statistics [12] and others. There exist many different concepts of solution for a set-valued optimization problem based on different approaches, such as the vector approach, the set approach, the lattice approach, the embedding approach, etc. One can refer to [11, 16,17,18,19,20, 23, 24] for studies related to set-valued optimization.
On the other hand, robust optimization has been a topic of much interest in the optimization community after the seminal work of Ben-Tal et al. [2, 3]. Actually, most of the real-life optimization problems suffer from uncertainties, especially when they are very sensitive to small data perturbation and therefore need solutions that take uncertainties into account. Both stochastic optimization and robust optimization deal with uncertainties. While a stochastic optimization problem takes into account the distribution of the uncertainty and gives only a probabilistic guarantee of optimal solution, robust optimization hedges against uncertainty with no knowledge of its probability distribution. Another related concept for problems with uncertainties is sensitivity analysis. But for sensitivity analysis, a solution is computed beforehand with nominal data, and then it is checked whether that solution is continuous with respect to small perturbation in the data. Whereas in robust optimization, it is beforehand assumed that the data are uncertain, and then the best possible solution is explored under the uncertainty.
The concepts of robust solutions are mainly application-driven, and therefore many different robustness definitions have been proposed by various researchers, for example, min–max robustness, optimistic robustness, regret robustness, light robustness, highly robustness, flimsily robustness, adjustable robustness, etc. to name a few. See [3, 8, 22] for an overview.
Robustness for multi-objective optimization has been studied by Schöbel et al. [5, 7, 15]. In the papers [6, 14], the robustness problem for vector-valued optimization has been equivalently posed as a problem of set-valued optimization, and some new concepts of robustness have been introduced based on different set order relations. However, no significant study has been made for robustness in set-valued optimization. In this paper, we introduce robustness for set-valued optimization to generalize some existing concepts of robustness for scalar and vector-valued optimization. We follow the set approach for solutions to set-valued optimization problems and study robustness within this framework.
In Sect. 2, we shall collect some basic notions in set-valued optimization and in robust scalar and vector-valued optimization. In Sect. 3, we introduce a robust set-valued optimization problem and various concepts of robust solutions for the same. We also study some existence results for the set robust solution concepts introduced.
2 Preliminaries
2.1 Set-valued optimization
At first, let us go through some basic notions of set-valued optimization. Let X be a topological space and let Z be a topological vector space partially ordered by a nonempty, closed, convex, pointed cone \(C \subseteq Z\). Here the order relation \(\le _C\) on Z induced by C is understood as follows: for \(z_1,z_2 \in Z\), \(z_1 \le _C z_2\) if and only if \(z_2-z_1 \in C\). Let \(S \subseteq X\) be a nonempty subset. A set-valued optimization problem (we only consider minimization problems in this paper) in the most general form looks like:
where \(F: X \rightarrow 2^Z\) is a set-valued map. Here \(2^Z\) denotes the power set of Z. As mentioned in the introduction, there are many approaches to define a solution for (1). But since we will be using only the set approach for the purpose of defining robust solutions for set-valued optimization problems, we discuss that here. One may refer to [16, 23] for the vector approach and [11, 24] for the lattice approach and the references therein.
2.1.1 Set approach
For two nonempty subsets A and B of Z, consider the following set order relations:
-
\(A \le ^l _C B \) if and only if \(A+C \supseteq B\).
-
\(A \le ^u _C B \) if and only if \(B-C \supseteq A\).
These set order relations were popularized in the optimization community by Kuroiwa and his collaborators [17,18,19,20]. Each of these set order relations is reflexive and transitive. Based on these set order relations, in [20], the notions of solution for (1) have been defined as follows: a point \(x^0 \in S\) is called an l-minimal (respectively a u-minimal) solution to (1), if for any \(x \in S\) such that \(F(x) \le ^l_C F(x^0)\) (respectively \(F(x) \le ^u_C F(x^0)\)), we have \(F(x^0) \le ^l_C F(x)\) (respectively \(F(x^0) \le ^u_C F(x)\)).
As per the ‘set approach’ of solution to problem (1) is concerned, the notion of l-minimal solution is prevalently used in the set-valued optimization literature; because, in some sense, it absorbs the solutions of (1) corresponding to the ‘vector approach’ of solution. However, as pointed out in [14], the notion of u-minimal solutions to a set-valued optimization problem becomes very useful for defining a min–max or worst case robust solution for an uncertain vector-valued optimization problem, because u-minimal solutions necessitate comparison among the “worst values”. The notion of l-minimal solutions has also been used for defining optimistic robust solution to an uncertain vector-valued optimization problem. We will also use u-minimal and l-minimal solutions to define min–max set robust and optimistic set robust solutions, respectively, for an uncertain set-valued optimization problem.
We shall now define two types of demi-lower semicontinuity for the set-valued map F in the problem (1) and derive two existence results, one each for u-minimal solution and l-minimal solution, respectively. For this, let us recall that a ‘net’ is a function from a directed set to a topological space.
Definition 1
A set-valued map \(F:X\rightarrow 2^Z\) is called l-type K-demi-lower semicontinuous at \(x^0 \in S\) if for each net \(\lbrace x_{\lambda } \rbrace \) in S with \(x_{\lambda } \rightarrow x^0\) and \(\bar{ \lambda } < \lambda \) implies \(F(x_{\lambda }) \le ^l_C F(x_{\bar{\lambda }})\), \(F(x^0)\le ^l_C \mathop {\bigcup }\limits _{\lambda }(F(x_{\lambda })+C)\). It is called l-type K-demi-lower semicontinuous on S if it is so at each point of S.
Definition 2
A set-valued map \(F:X\rightarrow 2^Z\) is called u-type K-demi-lower semicontinuous at \(x^0 \in S\) if for any net \(\lbrace x_{\lambda } \rbrace \) in S with \(x_{\lambda } \rightarrow x^0\) and \(\bar{ \lambda } < \lambda \) implies \(F(x_{\lambda }) \le ^u_C F(x_{\bar{\lambda }})\), \(F(x^0)\le ^u_C \mathop {\bigcap }\limits _{\lambda }(F(x_{\lambda })-C)\). It is called u-type K-demi-lower semicontinuous on S if it is so at each point of S.
Theorem 1
Consider the problem (1). If S is compact and F is l-type K-demi-lower semicontinuous on S, then there exists an l-minimal solution of (1).
Proof
The proof follows in a similar manner as given for Theorem 4.2. in [20]. Let \(\mathcal {F}(S) \subseteq 2^Z\) be defined by
On \(\mathcal {F}(S)\), we define the equivalence relation \(\simeq \) as follows: for \(s_1,s_2\) in S,
For each \(s \in S\), let us denote by [F(s)] the equivalence class of F(s) in the quotient set \(\mathcal {F}(S)/\simeq \). On \(\mathcal {F}(S)/\simeq \), let us define the order relation \(\preceq \) as: for \(s_1,s_2\) in S,
This order relation \(\preceq \) makes \(\mathcal {F}(S)/\simeq \) a partially ordered set. Now let \(\lbrace [F(x)] \mid x \in T \rbrace \) be a totally ordered subset of \(\mathcal {F}(S)/\simeq \). Here T is a subset of S. For \(x_1,x_2 \in T\), let us define an order relation < by: \(x_1 < x_2\) if and only if \([F(x_2)] \preceq [F(x_1)]\). This order < makes T a directed set and hence T is a net in S. Since S is compact, there exists a subnet \(\hat{T}\) of T converging to some \(x^0\) in S. Then by the definition of l-type K-demi-lower semicontinuous, we get,
We claim that \([F(x^0)] \preceq [F(x)]\) for every \(x \in T\).
Suppose that our claim is false. Then there exists \(\hat{x} \in T\) such that \([F(x^0)] \npreceq [F(\hat{x})]\), which implies, \(F(x^0) \nleq _C^l F(\hat{x})\). That means, there exists \(\hat{y} \in F(\hat{x})\) such that \(\hat{y} \notin F(x^0)+C\). Now since \(\hat{T}\) is a subnet of T, there must exists \(\tilde{x} \in \hat{T}\) such that \(\hat{x} < \tilde{x}\). This implies, \([F(\tilde{x})] \preceq [F(\hat{x})]\), which means, \(F(\tilde{x}) \le _C^l F(\hat{x})\). Now \(\hat{y} \in F(\hat{x})\) implies \(\hat{y} \in F(\tilde{x})+C \subseteq \mathop {\bigcup }\limits _{x \in \hat{T}}(F(x)+C)\). But then from the Eq. (2), \(\hat{y}\in F(x^0)+C\), and we arrive at a contradiction. Hence, our claim is true, that is, \([F(x^0)] \preceq [F(x)]\) for every \(x \in T\). This means that the totally ordered subset \(\lbrace [F(x)] \mid x \in T \rbrace \) has a lower bound. Hence using Zorn’s lemma, we can conclude \((\mathcal {F}(S)/\simeq , \preceq )\) has a minimal element, say \([F(x^*)]\). This means that \([F(x^*)] \preceq [F(x)]\) for every \(x\in S\), which then implies \(F(x^*) \le _C^l F(x)\) for every \(x \in S\). So \(x^*\) is an l-minimal solution of (1). \(\square \)
Theorem 2
Consider the problem (1). If S is compact and F is u-type K-demi-lower semicontinuous on S, then there exists a u-minimal solution of (1).
Proof
Though the proof follows in a similar fashion as that of Theorem 1, we give it for the readers’ convenience. Let us denote by \(\mathcal {F}(S)\) the same set as in the proof of Theorem 1. On \(\mathcal {F}(S)\), we define the equivalence relation \(\simeq \) as follows: for \(s_1,s_2\) in S,
For each \(s \in S\), let us denote by [F(s)] the equivalence class of F(s) in the quotient set \(\mathcal {F}(S)/\simeq \). On \(\mathcal {F}(S)/\simeq \), let us define the order relation \(\preceq \) as: for \(s_1,s_2\) in S,
This order relation \(\preceq \) makes \(\mathcal {F}(S)/\simeq \) a partially ordered set. Now let \(\lbrace [F(x)] \mid x \in T \rbrace \) be a totally ordered subset of \(\mathcal {F}(S)/\simeq \). Here T is a subset of S. For \(x_1,x_2 \in T\), let us define an order relation < by: \(x_1 < x_2\) if and only if \([F(x_2)] \preceq [F(x_1)]\). This order < makes T a directed set and hence T is a net in S. Since S is compact, there exists a subnet \(\hat{T}\) of T converging to some \(x^0\) in S. Then by the definition of u-type K-demi-lower semicontinuous, we get,
We claim that \([F(x^0)] \preceq [F(x)]\) for every \(x \in T\).
Suppose that our claim is false. Then there exists \(\hat{x} \in T\) such that \([F(x^0)] \npreceq [F(\hat{x})]\), which implies, \(F(x^0) \nleq _C^u F(\hat{x})\). That means, there exists \(y^0 \in F(x^0)\) such that \(y^0 \notin F(\hat{x})-C\). Now since \(\hat{T}\) is a subnet of T, there must exists \(\tilde{x} \in \hat{T}\) such that \(\hat{x} < \tilde{x}\). This implies, \([F(\tilde{x})] \preceq [F(\hat{x})]\), which means, \(F(\tilde{x}) \le _C^u F(\hat{x})\). Now \(F(\tilde{x}) \le _C^u F(\hat{x})\) means \(F(\tilde{x}) \subseteq F(\hat{x})-C\), which implies \(F(\tilde{x})-C \subseteq (F(\hat{x})-C)-C=(F(\hat{x})-C)\). The last equality follows because C is a convex cone. Now \(y^0 \notin F(\hat{x})-C\) implies \(y^0 \notin F(\tilde{x})-C \supseteq \mathop {\bigcap }\limits _{x \in \hat{T}}(F(x)-C)\). But then from the Eq. (3), \(y^0 \notin F(x^0)\), which is a contradiction. Hence, our claim is true, that is, \([F(x^0)] \preceq [F(x)]\) for every \(x \in T\). This means that the totally ordered subset \(\lbrace [F(x)] \mid x \in T \rbrace \) has a lower bound. Hence using Zorn’s lemma, we can conclude \((\mathcal {F}(S)/\simeq , \preceq )\) has a minimal element, say \([F(x^*)]\). This means that \([F(x^*)] \preceq [F(x)]\) for every \(x\in S\), which then implies \(F(x^*) \le _C^u F(x)\) for every \(x \in S\). So \(x^*\) is a u-minimal solution of (1). \(\square \)
The above two results will be useful to derive two existence results for set robust solutions in the latter Section. Now, let us recall some basic notions of robustness available in the literature.
2.2 Robustness for scalar and vector-valued optimization problem
Throughout this section and the rest of the paper, we shall consider robust optimization problems with uncertainty only in the objective, and we assume that the constraint(s) is(are) deterministic with no uncertainty. A robust scalar optimization problem with uncertainty only in the objective is defined by (see [3])
where \(f: \mathbb {R}^m \times U \rightarrow \mathbb {R}\) is a given map, \(S \subseteq \mathbb {R}^m\) is a known constraint/feasible set, and \(U \subseteq \mathbb {R}^k\) is the set of uncertain scenarios. For each fixed \(\xi \in U\), this is just a scalar optimization problem and hence (4) can be thought of as a family of scalar optimization problems \(\lbrace P(\xi ): \xi \in U \rbrace \), where \(P(\xi )\) is given as:

There are various ways to define robust solutions for the problem (4) based on its application of how the uncertainty is understood in the solution concept. A scenario-based approach gives rise to the concepts of highly and flimsily robust solutions. A point \(x^0 \in S\) is called a highly (or flimsily) robust solution of (4), if \(x^0\) is optimal for \(P(\xi )\) for all \(\xi \in U\) (respectively for at least one \(\xi \in U\)).
The most celebrated and researched concept of robust solution is min–max robust solution (also known as worst case robust or strict robust or simply robust solution in the literature) that deals with the so-called robust counterpart:
Note that (5) is a single scalar optimization problem, and in terms of the solution of this associated problem, a robust solution is defined for (4) (see [3]). A point \(x^0 \in S\) is called a min–max robust solution to (4) if it is an optimal solution of (5), that is, \(\mathop {\sup }\limits _{\xi \in U}f(x^0,\xi ) \le \mathop {\sup }\limits _{\xi \in U}f(x,\xi )\) for all \(x \in S\).
While min–max robustness is a pessimistic view, the optimistic view is the concept of optimistic robustness (see [4, 22]). Corresponding to (4), consider the counterpart as:
A point \(x^0 \in S\) is called an optimistic robust solution to (4) if it is an optimal solution of (6), that is, \(\mathop {\inf }\limits _{\xi \in U}f(x^0,\xi ) \le \mathop {\inf }\limits _{\xi \in U}f(x,\xi )\) for all \(x \in S\).
There are many other concepts of robustness, for example, regret robustness, light robustness, cardinality constrained robustness, recoverable robustness, adjustable robustness, etc. (see, for instance [8] and references therein for a detailed study). In [22], the authors have associated for each feasible \(x \in S\), a map \(f_x:U\rightarrow \mathbb {R}\) and studied various robustness by defining different order relations on the vector space \(\mathbb {R} ^ U \).
Robustness for multi-objective optimization problems has also been studied in the literature. The first instance in this direction can be [1], where the author has not precisely mentioned the word ‘robust’, but considered interval of coefficient matrices, which can be formulated as a problem of multi-objective linear robust optimization problem. The concept of highly and flimsily robustness can be extended straightforward for the multi-objective case (see [15]). Consider an uncertain multi-objective optimization problem
where \(f: \mathbb {R}^m \times U \rightarrow \mathbb {R}^n\) is a given map, \(S \subseteq \mathbb {R}^m\) is a known constraint/feasible set, and \(U \subseteq \mathbb {R}^k\) is the set of uncertain scenarios. Similar to the scalar case, the above problem (7) can be thought as a family of parametrized problems \(\mathcal {P}=\lbrace P(\xi ) \mid \xi \in U\rbrace \), given by

Given an uncertain multi-objective optimization problem \(\mathcal {P}\), a solution \(x \in S\) is called flimsily (or highly) robust solution for \(\mathcal {P}\) if it is efficient for \(P(\xi )\) for at least one \(\xi \in U\) (respectively for all \(\xi \in U\)). Here efficiency is understood as follows: Consider \(P(\xi )\) for some \(\xi \in U\). A point \(x\in S\) is efficient for \(P(\xi )\) if there does not exist any \(y \in S\) such that \(f(y,\xi ) \in \lbrace f(x,\xi ) \rbrace - (\mathbb {R}^n_+ \setminus \lbrace 0 \rbrace )\).
The min–max robustness has been extended in a first attempt for robust multi-objective optimization problems by Kuroiwa and Lee in [21]. Their approach was later called a point-based approach. A set-based approach was first formulated by Ehrgott et al. in [7]. Corresponding to the problem (7), for each \(x \in S\), consider the set of objective values of f at x as \(f_U(x)=\lbrace f(x,\xi ) \mid \xi \in U \rbrace \). A feasible solution \(x^0\in S\) is called a set-based min–max robust solution, if there is no \(x \in S \setminus \lbrace x^0 \rbrace \) such that \(f_U(x) \subseteq f_U(x^0)-(\mathbb {R}^n_+ \setminus \lbrace 0 \rbrace )\).
The term optimistic robustness for robust multi-objective optimization problem (7) through the l-minimal solutions of the ‘set-valued optimistic counterpart’ with the map \(f_U\) has been mentioned in [6, Section 2].
A new robustness concept, called multi-scenario robust efficiency, has been introduced for robust multi-objective optimization by Botte and Schöbel in [5], which follows a similar approach, as given in [22, Subsection 2.1]. Precisely, for the problem (7), a map \(F_x:U\rightarrow \mathbb {R}^n\) has been defined as
and the multi-scenario robust efficient solution is defined as follows: a point \(x^0 \in S\) is called multi-scenario robust efficient if there does not exist an element \(x\in S \setminus \lbrace x^0 \rbrace \) such that \(F_x(\xi ) \preceq F_{x^0}(\xi )\) for all \(\xi \in U\), where for \(a,b\in \mathbb {R}^n\), \(a \preceq b\) means \(a_i \le b_i\) for all \(i=1,2,\dots ,n\) and \(a \ne b\). For x and y in S if \(F_x(\xi ) \preceq F_{x^0}(\xi )\) for all \(\xi \in U\), then it is called that y dominates x.
In [14], the robustness for uncertain vector-valued optimization problems has been further explored with objective functions from any topological space X to a topological real vector space Z ordered by a nonempty, closed, convex, pointed cone \(C \subseteq Z\). In fact, based on various set order relations as introduced in Sect. 2.1.1, in [14], several new robustness concepts have been defined. Below we summarise some of the definitions of robustness given in [14].
Consider the problem
where \(F: X \times U \rightarrow Z\) is a vector-valued map, X is a topological space, Z is a topological real vector space ordered by a nonempty, closed, convex, pointed cone C, \(S \subseteq X\) is a known constraint/feasible set, and \(U \subseteq \mathbb {R}^k\) is the set of uncertain scenarios. Let Q denote one of C or \(C\setminus \lbrace 0 \rbrace \) or \(\text {int}\; C\), provided they are nonempty, and let \(*\) denote one of \(\lbrace l,u \rbrace \). Let \(F_U:X \rightarrow 2^Z\) be defined by \(F_U(x):= \lbrace F(x,\xi ) \mid \xi \in U \rbrace \).
Definition 3
[14, Definition 6, Definition 7] A point \(x^0 \in S\) is called a \(\le _Q ^*\)-robust solution for (9) if there is no solution \(x \in S\) other than \(x^0\) such that \(F_U (x) \le _Q ^* F_U (x^0) \).
Remark 1
Though the robustness for the multi-objective and vector-valued optimization problems has been equivalently formulated as set-valued optimization problems as in [7, 14] with the set-valued maps \(f_U\) and \(F_U\), respectively, there is a very subtle difference between what is defined as set-based robust solutions and what is known as solutions of a set-valued optimization problem in the set approach. For a point \(x^0\) to be a set-based robust solution of (9), there should not exists any x other than \(x^0\) which satisfies \(F_U(x) \le _Q^* F_U(x^0)\) (where \(*\) can be l or u, and Q can be C, \(C\setminus \lbrace 0 \rbrace \) or int C); but to be an l-minimal or a u-minimal solution for the set-valued optimization problem with the set-valued map \(F_U\), the definition demands that if there exists x such that \(F_U(x)\le _C^* F_U(x^0)\), then \(F_U(x^0)\le _C^*F_U(x)\) (where \(*\) represents l or u). In [6, Section 2], the authors have considered the latter approach to define robust counterpart and optimistic counterpart of a robust multi-objective optimization problem via the u-minimal and l-minimal solutions, respectively. We shall follow a similar approach as in [6].
We refer to [5,6,7, 14, 15, 21] and references therein for further information on robust vector-valued optimization. It is interesting to study the problem (9) when F is replaced by a set-valued map, in which case, the problem becomes a robust set-valued optimization problem.
3 Robustness for set-valued optimization problem
Consider the robust set-valued optimization problem
where \(F: X \times U \rightarrow 2^Z\) is a set-valued map, Z is ordered by a closed, convex, pointed cone C, \(S \subseteq X\) is a known constraint set and \(U \subseteq \mathbb {R}^k\) is the set of uncertainty.
As in the scalar and vector-valued cases, the first question that arises as to what it means to solve the problem (10). We answer that in the following subsection by introducing five different robustness concepts, namely highly set robustness, flimsily set robustness, min–max set robustness, optimistic set robustness, and multi-scenario set robustness. We take guidance from their analogues for robust scalar and vector-valued optimization problems and define corresponding solutions concepts for the problem (10).
3.1 Different concepts of robustness
3.1.1 Highly and flimsily set robustness
Considering each \(\xi \in U\) as a scenario, problem (10) can be viewed as a family of set-valued optimization problems, one corresponding to each scenario. Since there are different approaches to solve a set-valued optimization problem, we need to specify in what sense we understand a solution to those set-valued optimization problems. As mentioned in the introduction, we follow the set approach and understand the notion of a solution to a set-valued optimization problem in terms of the two set order relations, namely \(\le _C^u\) and \(\le _C^l\). Based on these two set order relations, we can write (10) as families of set-valued optimization problems \(\lbrace P(F, \xi ,\le _C ^*) \mid \xi \in U \rbrace \):

where \(*\) can be one of u and l.
Definition 4
Consider the problem (10). A point \(x^0 \in S\) is called
-
a \(\le _C ^u\)-type highly set robust solution to (10) if \(x^0\) is an optimal solution for \(P(F,\xi , \le _C ^u)\) for all \(\xi \in U\).
-
a \(\le _C ^u\)-type flimsily set robust solution to (10) if \(x^0\) is an optimal solution for \(P(F,\xi , \le _C ^u)\) for at least one \(\xi \in U\).
-
a \(\le _C ^l\)-type highly set robust solution to (10) if \(x^0\) is an optimal solution for \(P(F, \xi , \le _C ^l)\) for all \(\xi \in U\).
-
a \(\le _C ^l\)-type flimsily set robust solution to (10) if \(x^0\) is an optimal solution for \(P(F,\xi , \le _C ^l)\) for at least one \(\xi \in U\).
The following proposition follows immediately from the definition.
Proposition 1
Every \(\le _C ^u\)-type highly set robust solution is a \(\le _C ^u\)-type flimsily set robust solution. Similarly, every \(\le _C ^l\)-type highly set robust solution is a \(\le _C ^l\)-type flimsily set robust solution.
Proof
These follow from the definition. \(\square \)
3.1.2 Min–max and optimistic set robustness
As mentioned in the earlier sections, the min–max robustness is the earliest and most researched concept of robustness in robust scalar and vector-valued optimization problems. It deals with the formation of the so-called ‘min–max robust counterpart’, which converts the family of problems to a single optimization problem. For robust scalar optimization, the min–max robust counterpart formulation has been shown in (5). The ‘optimistic robust counterpart’ was introduced in [4] to study the duality theory in robust optimization problems. For robust vector-valued optimization problem, the min–max robustness has been extended in many ways and has been equivalently posed as a set-valued optimization problem through a set-valued robust counterpart in [6, 7, 14]. For problem (10), constructing these so-called ‘robust counterparts’ will be interesting. Following [6, 7, 14], we define a set-valued map \(F_U:X \rightarrow 2^Z\) as
As seen in the case of a robust vector-valued optimization problem, this map \(F_U(x)\) captures all the “good things” as well as all the “bad things” that can happen, if we choose the decision x. This motivates us to define the following two robust solutions for the set-valued case for the problem (10). We consider the following set-valued robust counterpart to (10):
Definition 5
Consider the problem (10). A point \(x^0 \in S\) is called
-
a min–max set robust solution of (10) if \(x^0\) is a u-minimal solution of (12), that is, for any \(x \in S\), \(F_U(x) \le ^u_C F_U(x^0)\) implies \(F_U(x^0) \le ^u_C F_U(x)\).
-
an optimistic set robust solution of (10) if \(x^0\) is an l-minimal solution of (12), that is, for any \(x \in S\), \(F_U(x) \le ^l_C F_U(x^0)\) implies \(F_U(x^0) \le ^l_C F_U(x)\).
Remark 2
Obviously, when \(|U|=1\), (10) reduces to a set-valued optimization problem, and in that case, the min–max set robust (similarly the optimistic set robust) solutions correspond to the u-minimal (respectively the l-minimal) solutions of the set-valued optimization problem.
Also when F is just single-valued, that is, F maps X into Z, the min–max set robust (similarly the optimistic set robust) solution corresponds to the min–max robust (respectively the optimistic robust) solution of the robust vector-valued optimization problem defined as in [6, section 2].
3.1.3 Multi-scenario set robustness
Another way to define a robust solution to the problem (10) is to extend the idea as proposed in [5] to define a multi-scenario set robust solution. Corresponding to the problem (10), let us define for each \(x\in S\), a set-valued map \(F_x :U \rightarrow 2^Z\) given by
Definition 6
Consider the problem (10). A point \(x^0 \in S\) is called
-
a \(\le _C ^u\)-type multi-scenario set robust solution if there exists no \(x \in S\) such that \(F_x (\xi ) \le _C ^u \) \( F_{x^0} (\xi )\) for all \(\xi \in U\), but \(F_{x^0} (\xi ) \nleq _C ^u \) \( F_{x} (\xi ) \) for at least one \( \xi \in U\).
-
a \(\le _C ^l\)-type multi-scenario set robust solution if there exists no \(x \in S\) such that \(F_x (\xi ) \le _C ^l F_{x^0} (\xi )\) for all \(\xi \in U\), but \(F_{x^0} (\xi ) \nleq _C ^l \) \( F_{x} (\xi ) \) for at least one \( \xi \in U\).
Note 1 In the above definition if we replace Z by \( \mathbb {R}^n\), C by \(\mathbb {R}^n _+ \) and if F is just a vector-valued map from \(X \times U\) into \(\mathbb {R}^n\), all these multi-scenario set robust solution definitions as in Definition (6) boil down to that of multi-scenario efficiency as in [5].
For two points x and y in S, we say that x u-dominates y with respect to F, if \(F_x (\xi ) \le _C ^u F_{y} (\xi )\) for all \(\xi \in U\). Similarly, we say that x l-dominates y with respect to F, if \(F_x (\xi ) \le _C ^l F_{y} (\xi )\) for all \(\xi \in U\). In terms of domination, the above Definition 6 can be reformulated as:
-
\(x^0 \in S\) is a \(\le _C ^u\)-type multi-scenario set robust solution if there does not exist \(x \in S\) such that x u-dominates \(x^0\) with respect to F, but \(x^0\) does not u-dominate x with respect to F.
-
\(x^0 \in S\) is a \(\le _C ^l\)-type multi-scenario set robust solution if there does not exist \(x \in S\) such that x l-dominates \(x^0\) with respect to F, but \(x^0\) does not l-dominate x with respect to F.
We have defined various set robust solution concepts. Let us now understand these concepts through an example.
Example 1
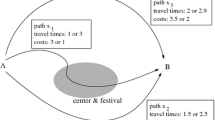
Let \(X=\lbrace x_1, x_2 \rbrace \) with discrete topology, \(Z=\mathbb {R}^2\) ordered by \(C=\mathbb {R}^2 _+\) and \(U=[-1,1] \subseteq \mathbb {R}\). Define \(F:X\times U \rightarrow 2^{\mathbb {R}^2}\) as:

Illustration of the problem in the Example 1
In this example, it holds that both \(x_1\) and \(x_2\) are u-minimal solutions for \(P(F,\xi ,\le _C ^u)\) for \(\xi \ge 0\) and only \(x_2\) is the u-minimal solution for \(P(F,\xi ,\le _C ^u)\) for \(\xi < 0\). Hence both \(x_1\) and \(x_2\) are \(\le _C ^u\)-type flimsily set robust solutions, and \(x_2\) is a \(\le _C ^u\)-type highly set robust solution.
Similarly, for the l-minimal case, only \(x_2\) is an l-minimal solution for \(P(F,\xi ,\le _C ^l)\) when \(\xi < -\frac{3}{5}\) and only \(x_1\) is an l-minimal solution for \(P(F,\xi ,\le _C ^l)\) when \(\xi > -\frac{3}{5}\). Hence both \(x_1\) and \(x_2\) are \(\le _C ^l\)-type flimsily set robust solutions, but it has no \(\le _C ^l\)-type highly set robust solution.
From Fig. 1, we see that \(F_U(x_1) \le _C ^u F_U(x_2)\) and \(F_U(x_2) \le _C ^u F_U(x_1)\). Thus both \(x_1\) and \(x_2\) are min–max set robust solutions. Similarly, \(F_U(x_2) \le _C ^l F_U(x_1)\) but \(F_U(x_1) \nleq _C ^l F_U(x_2)\). So, \(x_2\) is an optimistic set robust solution.
Also, \(x_2\) is a \(\le _C ^u\)-type multi-scenario set robust solution.
Let us now look at a more practical example of min–max set robustness and multi-scenario set robustness connecting these to two-person-zero-sum games with multidimensional pay-offs as discussed in the paper [13]. We recall some of the notations used in the paper [13] and refer the readers to the same for more detailed discussion.
Example 2
Consider a two-person-zero-sum game with multidimensional pay-off. Let \(G=(g_{ij})_{m \times n}\) be the pay-off matrix where \(g_{ij}=(g_{ij}^1,g_{ij}^2,\dots ,g_{ij}^d)^T \in \mathbb {R}^d\). G is interpreted as the loss matrix for the row choosing player I. Let the sets
denote all possible mixed strategies for player I and player II, respectively. On \(\mathbb {R}^d\), the partial order is considered with respect to the ordering cone \(\mathbb {R}^d_+\). The following notations are taken from the mentioned paper:
-
for \(p \in P\) and \(q \in Q\), \(v(p,q)= \sum \limits _{i=1}^{m}\sum \limits _{j=1}^{n}p_ig_{ij}q_j \in \mathbb {R}^d\).
-
for \(p,\bar{p} \in P\), \(p \le _I \bar{p}\) denotes that for all \(q \in Q\), \(v(p,q)\le _{\mathbb {R}_+^d} v(\bar{p},q)\).
-
for \(p,\bar{p} \in P\), \(p =_I \bar{p}\) denotes that for all \(q \in Q\), \(v(p,q)= v(\bar{p},q)\).
-
for \(p \in P\), \(v_I(p)=\lbrace v(p,q) \mid \; q \in Q \rbrace \)
-
for \(p \in P\), \(V_I(p)=v_I(p)-\mathbb {R}^d_+\).
The following two solutions for the game G for player I have been discussed in the paper. For player I, a strategy \(p\in P\) is called
-
[13, page 376] \(\le _I\)-minimal if \((\bar{p} \in P, \bar{p} \le _I p)\) implies \(p=_I\bar{p}\).
-
[13, Definition 3.4] minimal if there is no \(\bar{p} \in P\) with \(V_I(\bar{p}) \subseteq V_I(p)\) and \(V_I(p) \ne V_I(\bar{p})\).
Now observe that for \(p,\bar{p} \in P\) and \(q \in Q\), \(v(p,q) \le _{\mathbb {R}^d_+} v(\bar{p},q)\) if and only if \((v(p,q)-\mathbb {R}^d_+) \le _{\mathbb {R}^d_+}^u (v(\bar{p},q)-\mathbb {R}^d_+)\). Also \(V_I(p)=v_I(p)-\mathbb {R}^d_+=\mathop {\bigcup }\limits _{q \in Q}(v(p,q)-\mathbb {R}^d_+)\). These motivate us to define the following uncertain optimization problem
where \(F: P \times Q \rightarrow 2^{\mathbb {R}^d}\) is the set-valued map \(F(p,q)=v(p,q)-\mathbb {R}^d_+\). Then it can be seen that a \(\le _C ^u\)-type multi-scenario set robust solution to (15) corresponds to a \(\le _I\)-minimal strategy for player I and a min–max set robust solution to (15) corresponds to a minimal strategy for player I.
As we have defined five kinds of set robust solutions for (10), let us now see how we can talk about their existence for certain class of problems. We derive some results in this direction via factorization in Sect. 3.2, via scalarization in Sect. 3.3, and via some semicontinuity type assumptions in Sect. 3.4.
3.2 Factorization
The idea behind factorization applies to those problems which can be split into lower-dimensional subproblems, and information is available for their lower-dimensional part. Suppose that Z can be written as \(Z=Z_1 \times Z_2 \times \dots \times Z_p\) and the ordering cone C as \(C=C_1 \times C_2 \times \dots \times C_p\). Then, for \(A,B \subseteq Z\), \(A\le _C ^u B\) implies \(A_i \le _{C_i}^u B_i\) for all \(i=1,2,\dots ,p\), where \(A_i\) (respectively \(B_i\)) denotes the projection of A (respectively B) into \(Z_i\). Similarly, \(A\le _C ^l B\) implies \(A_i \le _{C_i}^l B_i\) for all \(i=1,2,\dots ,p\), where \(A_i\) and \(B_i\) are understood as above.
3.2.1 Highly and flimsily set robustness
In the above setting, the map F of problem (10) can be broken into \(F=(F_1,F_2,\dots ,F_p)\), where \(F_i(x,\xi )\) is the projection of \(F(x,\xi )\) into \(Z_i\). Thus, each \(F_i\) is a set-valued map from \(X \times U\) to \(Z_i\). For each \(i=1,2,\dots ,p\), consider the following families of optimization problems:

where \(*\) can be one of u and l.
Proposition 2
Consider the problem (10) where Z, C, and F are factored as above. For some \(i_0 \in \lbrace 1,2,\dots ,p \rbrace \), let \(x^0 \in S\) be a unique optimal solution for \(P(F_{i_0}, \xi ,\le _{C_{i_0}} ^u)\) for all \(\xi \in U\). Then \(x^0\) is a \(\le _C ^u\)-type highly set robust solution for (10).
Proof
Suppose that \(x^0\) is not a \(\le _C ^u\)-type highly set robust solution for (10). Then there exist some \( \xi ^0 \in U\) and some \( x \in S \setminus \lbrace x^0 \rbrace \) such that \(F(x,\xi ^0) \le _C ^u F(x^0,\xi ^0)\) but \(F(x^0,\xi ^0) \nleq _C ^u F(x,\xi ^0)\). Now, \(F(x,\xi ^0) \le _C ^u F(x^0,\xi ^0)\) implies that \(F_{i_0}(x,\xi ^0)\le _{C_{i_0}}^u F_{i_0}(x^0,\xi ^0)\), which contradicts the fact that \(x^0\) is a unique optimal solution for \(P(F_{i_0}, \xi ,\le _{C_{i_0}} ^u)\) for all \(\xi \in U\). Hence, \(x^0\) is a \(\le _C ^u\)-type highly set robust solution for (10). \(\square \)
Corollary 1
In addition to the conditions on Z, C and F as that of in Proposition 2, suppose that there exists \( i_0 \in \lbrace 1,2,\dots ,p \rbrace \) such that \(F_{i_0}\) is independent of \(\xi \), that is, \(F_{i_0}(x,\xi )=G(x)\) for all \(\xi \in U\) and for all \(x \in S\), where \(G:S \rightarrow 2^{Z_{i_0}}\) is some set-valued map. If \(x^0 \in S\) is a unique \(\le ^u _{C_{i_0}}\)-minimal solution for G, then \(x^0\) is a \(\le _C ^u\)-type highly set robust solution for (10).
Proposition 3
Consider the problem (10) where Z, C, and F are factored as above. For some \(i_0 \in \lbrace 1,2,\dots ,p \rbrace \), let \(x^0 \in S\) be a unique optimal solution for \(P(F_{i_0}, \xi ,\le _{C_{i_0}} ^l)\) for all \(\xi \in U\). Then \(x^0\) is a \(\le _C ^l\)-type highly set robust solution for (10).
Proof
The proof follows in a similar way as that of Proposition 2 by replacing u with l in the set order relations. \(\square \)
Corollary 2
In addition to the conditions on Z, C and F as that of in Proposition 3, suppose that there exists \( i_0 \in \lbrace 1,2,\dots ,p \rbrace \) such that \(F_{i_0}\) is independent of \(\xi \), that is, \(F_{i_0}(x,\xi )=G(x)\) for all \(\xi \in U\) and for all \(x \in S\), where \(G:S \rightarrow 2^{Z_{i_0}}\) is some set-valued map. If \(x^0 \in S\) is a unique \(\le ^l _{C_{i_0}}\)-minimal solution for G, then \(x^0\) is a \(\le _C ^l\)-type highly set robust solution for (10).
3.2.2 Min–max and optimistic set robustness
For min–max and optimistic set robust solutions, the map \(F_U\) defined through equation (11) plays a crucial role. If Z and C are factored as \(Z=Z_1 \times Z_2 \times \dots \times Z_p\) and \(C=C_1 \times C_2 \times \dots \times C_p\), respectively, then \(F_U\) can be written as \(F_U=(F_{U 1},F_{U2},\dots ,F_{Up})\), where \(F_{U i}(x)\) is the projection of \(F_U(x)\) into \(Z_i\). For each \(i \in \lbrace 1,2,\dots ,p \rbrace \) consider the following set-valued optimization problem

Proposition 4
Assume that Z and C are factored as above. If \(x^0 \in S\) is a unique u-minimal solution for \(P(F_{U{i_0}})\) for some \(i_0 \in \lbrace 1,2,\ldots ,p \rbrace \), then \(x^0\) is a min–max set robust solution for (10).
Proof
Suppose that \(x^0\) is not a min–max set robust solution for (10). Then there exists \( x \in S\setminus \lbrace x^0 \rbrace \) such that \(F_U(x) \le _C ^u F_U(x^0)\) but \(F_U(x^0) \nleq _C ^u F_U(x)\). Now \(F_U(x) \le _C ^u F_U(x^0)\) implies that \(F_{Ui_0}(x)\le _{C_{i_0}}^u F_{Ui_0}(x^0)\), contradicting the fact that \(x^0\) is a unique u-minimal solution for \(P(F_{U{i_0}})\). Hence, \(x^0\) is a min–max set robust solution for (10). \(\square \)
Proposition 5
Assume that Z and C are factored as above. If \(x^0 \in S\) is a unique l-minimal solution for \(P(F_{U{i_0}})\) for some \(i_0 \in \lbrace 1,2,\dots ,p \rbrace \), then \(x^0\) is an optimistic set robust solution for (10).
Proof
The proof follows in a similar way as that of Proposition 4. \(\square \)
3.2.3 Multi-scenario set robustness
A reducing/splitting result can be derived for multi-scenario set robust solutions for (10) as well. Suppose that Z and C are factored as \(Z=Z_1 \times Z_2 \times \dots \times Z_p\) and \(C=C_1 \times C_2 \times \dots \times C_p\), respectively. Then for each \(x \in S\), the map \(F_x\), defined as in equation (13) can be written as \(F_x=(F_{1x},F_{2x },\dots ,F_{px })\), where \(F_{i x }(\xi )\) is the projection of \(F_x(\xi )\) into \(Z_i\), that is, \(F_{i x }\) is a set-valued map from U to \(Z_i\).
Proposition 6
If for some \(i_0 \in \lbrace 1,2,\dots ,p \rbrace \) there does not exist \( x \in S\setminus \lbrace x^0 \rbrace \) such that \(F_{i_0x}(\xi ) \le _{C_{i_0}} ^u F_{i_0x^0}(\xi )\) for all \(\xi \in U\), then \(x^0\) is a \(\le _C ^u\)-type multi-scenario set robust solution of (10).
Proof
If not, then there exists \( x \in S\setminus \lbrace x^0 \rbrace \) such that \(F_x(\xi ) \le _C ^u F_{x^0} (\xi )\) for all \(\xi \in U\). But this implies \(F_{i_0x}(\xi ) \le _{C_{i_0}} ^u F_{i_0x^0}(\xi )\) for all \(\xi \in U\), contradicting the assumption. \(\square \)
Proposition 7
If for some \(i_0 \in \lbrace 1,2,\dots ,p \rbrace \) there does not exist \( x \in S\setminus \lbrace x^0 \rbrace \) such that \(F_{i_0x}(\xi ) \le _{C_{i_0}} ^l F_{i_0x^0}(\xi )\) for all \(\xi \in U\), then \(x^0\) is a \(\le _C ^l\)-type multi-scenario set robust solution of (10).
Proof
The proof follows in a similar way as that of Proposition 6. \(\square \)
3.3 Scalarization
Scalarization is always a very standard technique for set-valued/vector-valued optimization problems that convert those problems into scalar optimization problems and study properties through their scalarized versions. For scalarization techniques, the idea of monotone function is very useful.
Definition 7
A function \(\phi : Z \rightarrow \mathbb {R}\) is called C-monotone if for all \( z_1\) and \(z_2\) in Z,
For example, each \(z^* \in C^*\) defines a C-monotone function, where \(C^*\) is the dual cone of C.
3.3.1 Highly and flimsily set robustness
For a C-monotone function \(\phi \), consider the following two families of scalar optimization problems:

and

Proposition 8
Consider the problem (10). If \(x^0 \in S\) is a unique optimal solution for \(P(\phi ,F, \xi ,\le _C ^u)\) for some nonzero C-monotone function \(\phi \) and for all \(\xi \in U\), then \(x^0\) is a \(\le _C ^u\)-type highly set robust solution for (10).
Proof
Suppose that \(x^0\) is not a \(\le _C ^u\)-type highly set robust solution for (10). Then there exist \( \xi ^0 \in U\) and \(x \in S\setminus \lbrace x^0 \rbrace \) such that \(F(x,\xi ^0) \le _C ^u F(x^0,\xi ^0)\) but \(F(x^0,\xi ^0) \nleq _C ^u F(x,\xi ^0)\). Now \(F(x,\xi ^0) \le _C ^u F(x^0,\xi ^0)\) implies that for every \(z \in F(x,\xi ^0)\), there exists \(z^0 \in F(x^0,\xi ^0)\) such that \(z \le _C z^0\). Then, since \(\phi \) is C-monotone, \(\phi (z) \le \phi (z^0) \le \mathop {\sup }\nolimits _{\hat{z} \in F(x^0,\xi ^0)} \phi (\hat{z})\). This is true for every \(z \in F(x,\xi ^0)\). Hence, \(\mathop {\sup }\nolimits _{{z} \in F(x,\xi ^0)} \phi ({z}) \le \mathop {\sup }\nolimits _{\hat{z} \in F(x^0,\xi ^0)} \phi (\hat{z})\). But this contradicts the fact that \(x^0 \in S\) is a unique optimal solution for \(P(\phi ,F, \xi ,\le _C ^u)\) for all \(\xi \in U\). Hence, \(x^0\) is a \(\le _C ^u\)-type highly set robust solution for (10). \(\square \)
Proposition 9
Consider the problem (10). If \(x^0 \in S\) is a unique optimal solution for \(P(\phi ,F, \xi ,\le _C ^l)\) for some nonzero C-monotone function \(\phi \) and for all \(\xi \in U\), then \(x^0\) is a \(\le _C ^l\)-type highly set robust solution for (10).
Proof
The proof follows in a similar way as that of Proposition 8. \(\square \)
3.3.2 Min–max and optimistic set robustness
Let \(\phi : Z \rightarrow \mathbb {R}\) be a C-monotone function. Consider the following two scalar optimization problems:
Proposition 10
If \(x^0 \) is a unique optimal solution of (16) for some nonzero C-monotone function \(\phi \), then \(x^0\) is a min–max set robust solution for (10).
Proof
Let \(x^0\) be a unique optimal solution of (16) for some nonzero \(\phi \). That means
Suppose that \(x^0\) is not a min–max set robust solution for (10). Then there exists \(\bar{x} \in S \setminus \lbrace x^0 \rbrace \) such that
Now, from the definition of \(\le _C^u\), \(F_U (\bar{x}) \le _C ^u F_U (x^0)\) implies for any \( \bar{z} \in F_U(\bar{x})\), there exists \({z^0} \in F_U(x^0)\) with \( \bar{z} \le _C {z^0}\).
This is true for any \(\bar{z} \in F_U(\bar{x})\). Taking supremum on the left side of this inequality, we get
But this contradicts (18). Hence \(x^0\) must be a min–max set robust solution to (10). \(\square \)
Proposition 11
If \(x^0 \) is a unique optimal solution of (17) for some nonzero C-monotone function \(\phi \), then \(x^0\) is an optimistic set robust solution for (10).
Proof
It follows in a similar way as the proof of Proposition 10. \(\square \)
3.3.3 Multi-scenario set robustness
Let us derive one scalarization result for multi-scenario set robust solutions. Let \(\phi \) be a C-monotone function. For each \(x\in S\), consider the following two functions:
The domination definition can be given with respect to these functions. For two points x and \(y \in S\), we say that
-
x dominates y with respect to \(\overline{\phi \circ F}\), if \({\overline{(\phi \circ F)}}~_x (\xi ) \le {\overline{(\phi \circ F)}}~_y (\xi )\) for all \(\xi \in U\).
-
x dominates y with respect to \(\underline{\phi \circ F}\), if \({\underline{(\phi \circ F)}}~_x (\xi ) \le {\underline{(\phi \circ F)}}~_y (\xi )\) for all \(\xi \in U\).
Proposition 12
Consider the problem (10). If \(x^0 \in S\) is nondominated with respect to \(\overline{\phi \circ F}\), that is, if there is no \(x \in S\) other than \(x^0\) such that \({\overline{(\phi \circ F)}}~_x (\xi ) \le {\overline{(\phi \circ F)}}~_{x^0} (\xi )\) for all \(\xi \in U\), then \(x^0\) is a \(\le _C ^u\)-type multi-scenario set robust solution.
Proof
Suppose that \(x^0 \in S\) is nondominated with respect to \(\overline{\phi \circ F}\) but not a \(\le _C ^u\)-type multi-scenario set robust solution to (10). Then there exists \(x \in S \setminus \lbrace x^0 \rbrace \) such that \(F_x(\xi ) \le _C ^u F_{x^0} (\xi )\) for all \(\xi \in U\) but \(F_{x^0}(\xi ^0) \nleq _C ^u F_{x} (\xi ^0)\) for some \(\xi ^0 \in U\). But \(F_x(\xi ) \le _C ^u F_{x^0} (\xi )\) for all \(\xi \in U\) implies \(F(x,\xi ) \le _C ^u F(x^0,\xi ) \) for all \( \xi \in U\). Since \(\phi \) is C-monotone, this implies that \(\mathop {\sup }\nolimits _{z \in F(x,\xi )} \phi (z) \le \mathop {\sup }\nolimits _{z \in F(x^0,\xi )}\phi (z) \) for all \(\xi \in U\), that is, \({\overline{(\phi \circ F)}}~_x (\xi ) \le {\overline{(\phi \circ F)}}~_{x^0} (\xi )\) for all \(\xi \in U\). But this is a contradiction to the fact that \(x^0\) is nondominated with respect to \(\overline{\phi \circ F}\). Hence \(x^0 \in S\) is a \(\le _C ^u\)-type multi-scenario set robust solution to (10). \(\square \)
Proposition 13
Consider the problem (10). If \(x^0 \in S\) is nondominated with respect to \(\underline{\phi \circ F}\), that is, if there is no \(x \in S\) other than \(x^0\) such that \({\underline{(\phi \circ F)}}~_x (\xi ) \le {\underline{(\phi \circ F)}}~_{x^0} (\xi )\) for all \(\xi \in U\), then \(x^0\) is a \(\le _C ^l\)-type multi-scenario set robust solution.
Proof
The proof follows in a similar way as that of Proposition 12. \(\square \)
3.4 Semicontinuity type property
We shall derive two more existence results, one each for min–max set robust solution and optimistic set robust solution. But for that, we need the map F to satisfy some stronger property.
Definition 8
Consider the problem (10). The map F is called U-coordinated u-decreasing, if for any \(x^1,x^2 \in X\) with \(F_U(x^1) \le ^u_C F_U(x^2)\), we have \(F(x^1,\xi ) \le ^u_C F(x^2,\xi )\) for all \(\xi \in U\).
Definition 9
Consider the problem (10). The map F is called U-coordinated l-decreasing, if for any \(x^1,x^2 \in X\) with \(F_U(x^1) \le ^l_C F_U(x^2)\), we have \(F(x^1,\xi ) \le ^l_C F(x^2,\xi )\) for all \(\xi \in U\).
Theorem 3
Consider the problem (10) with S compact. If F is U-coordinated u-decreasing and for each fixed \(\xi \in U\), the set-valued map \(x \mapsto F(x,\xi )\) is u-type K-demi-lower semicontinuous on S, then (10) has a min–max set robust solution.
Proof
In light of Theorem 2, it is enough to prove that \(x \mapsto F_U(x)=\mathop {\bigcup }\limits _{\xi \in U} F(x,\xi )\) is u-type K-demi-lower semicontinuous on S.
Consider \(x^0 \in S\) and a net \(\lbrace x_{\lambda } \rbrace \) converging to \( x^0\) such that \( \bar{ \lambda } < \lambda \) implies \(F_U(x_{\lambda }) \le ^u_C F_U(x_{\bar{\lambda }})\). Since F is U-coordinated u-decreasing, for any \( \xi \in U\) and \( \bar{ \lambda } < \lambda \), we get, \(F(x_{\lambda },\xi ) \le ^u_C F(x_{\bar{\lambda }},\xi )\).
Let us choose and fix \(\xi \in U\). Since \(x \mapsto F(x,\xi )\) is u-type K-demi-lower semicontinuous on S, we have,
that is,
The above relation is valid for all \(\xi \in U\) and hence taking union over \(\xi \) on both sides, we get
That is,
So,
Thus, the function \(x \mapsto F_U(x)=\mathop {\bigcup }\limits _{\xi \in U}F(x,\xi )\) is u-type K-demi-lower semicontinuous at \(x^0\). Since \(x^0\in S\) is arbitrary, we conclude that \(x \mapsto F_U(x)=\mathop {\bigcup }\limits _{\xi \in U} F(x,\xi )\) is u-type K-demi-lower semicontinuous on S. \(\square \)
Theorem 4
Consider the problem (10) with S compact. If F is U-coordinated l-decreasing and for each fixed \(\xi \in U\), the set-valued map \(x \mapsto F(x,\xi )\) is l-type K-demi-lower semicontinuous on S, then (10) has an optimistic set robust solution.
Proof
In light of Theorem 1, it is enough to prove that \(x \mapsto F_U(x)=\mathop {\bigcup }\nolimits _{\xi \in U} F(x,\xi )\) is l-type K-demi-lower semicontinuous on S.
Consider \(x^0 \in S\) and a net \(\lbrace x_{\lambda } \rbrace \) converging to \( x^0\) such that \( \bar{ \lambda } < \lambda \) implies \(F_U(x_{\lambda }) \le ^l_C F_U(x_{\bar{\lambda }})\). Since F is U-coordinated l-decreasing, for any \( \xi \in U\) and \( \bar{ \lambda } < \lambda \), we get, \(F(x_{\lambda },\xi ) \le ^l_C F(x_{\bar{\lambda }},\xi )\).
Let us choose and fix \(\xi \in U\). Since \(x \mapsto F(x,\xi )\) is l-type K-demi-lower semicontinuous on S, we have,
that is,
The above relation is true for all \(\xi \in U\) and hence taking union over \(\xi \) on both sides, we get
Thus
So,
Thus, the function \(x \mapsto F_U(x)=\mathop {\bigcup }_{\xi \in U}F(x,\xi )\) is l-type K-demi-lower semicontinuous at \(x^0\). Since \(x^0\in S\) is arbitrary, we conclude that \(x \mapsto F_U(x)=\mathop {\bigcup }_{\xi \in U} F(x,\xi )\) is l-type K-demi-lower semicontinuous on S. \(\square \)
We have defined various robustness concepts for robust set-valued optimization problem. Now let us see some relationships among them.
3.5 Relationship between different set robustness
3.5.1 Highly/flimsily and min–max/optimistic set robust solution
Proposition 14
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^u\)-type highly set robust solution to (10). If F is U-coordinated u-decreasing, then \(x^0\) is a min–max set robust solution to (10).
Proof
Let \( x \in S\) be such that \(F_U(x) \le ^u _C F_U (x^0) \). Since F is U-coordinated u-decreasing, \(F(x,\xi ) \le ^u _C F ({x^0},\xi ) \) for all \(\xi \in U\). Since \(x^0\) is a \(\le _C ^u\)-type highly set robust solution to (10), we have \(F(x^0,\xi ) \le ^u _C F ({x},\xi )\) for all \(\xi \in U\). This means that \(F(x^0,\xi ) \subseteq F ({x},\xi ) -C \) for all \(\xi \in U\). Hence \(F_U(x^0)=\mathop {\bigcup }_{\xi \in U}F(x^0,\xi ) \subseteq \mathop {\bigcup }\limits _{\xi \in U}[F(x,\xi )-C] = [\mathop {\bigcup }\limits _{\xi \in U}F(x,\xi )]-C=F_U(x)-C\). Thus, \(F_U(x^0)\le _C ^u F_U(x)\). It is true for any \(x\in S\) with \(F_U(x) \le ^u _C F_U (x^0) \). Hence \(x^0\) is a min–max set robust solution to (10). \(\square \)
Proposition 15
Consider the robust set-valued optimization problem (10) with F U-coordinated u-decreasing. Let \(x^0 \in S\) be a \(\le _C ^u\)-type flimsily set robust solution to (10) with the additional hypothesis that there exists \(\xi ^0 \in U\) such that \(x^0\) is a unique u-minimal solution for \(P(F, \xi ^0,\le _C ^u)\). Then \(x^0\) is a min–max set robust solution.
Proof
Let \( x \in S\) be such that \(F_U(x) \le ^u _C F_U (x^0) \). Since F is U-coordinated u-decreasing, \(F(x,\xi ) \le ^u _C F ({x^0},\xi ) \) for all \(\xi \in U\). In particular \(F(x,\xi ^0) \le ^u _C F ({x^0},\xi ^0)\). But this contradicts the fact that \(x^0\) is a unique u-minimal solution for \(P(F,\xi ^0,\le _C ^u)\). Hence no such \(x\in S\) exists with the property that \(F_U(x) \le ^u _C F_U (x^0) \). Hence \(x^0\) is a min–max set robust solution to (10). \(\square \)
Proposition 16
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^l\)-type highly set robust solution to (10). If F is U-coordinated l-decreasing, then \(x^0\) is an optimistic set robust solution to (10).
Proof
The proof follows in a similar way as that of Proposition 14. \(\square \)
Proposition 17
Consider the robust set-valued optimization problem (10) with F U-coordinated l-decreasing. Let \(x^0 \in S\) be a \(\le _C ^l\)-type flimsily set robust solution to (10) with the additional hypothesis that there exists \(\xi ^0 \in U\) such that \(x^0\) is a unique l-minimal solution for \(P(F,\xi ^0,\le _C ^l)\). Then \(x^0\) is an optimistic set robust solution to (10).
Proof
The proof follows in a similar way as that of Proposition 15. \(\square \)
3.5.2 Highly/flimsily and multi-scenario set robust solution
Proposition 18
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^u\)-type highly set robust solution to (10). Then \(x^0\) is a \(\le _C ^u\)-type multi-scenario set robust solution to (10).
Proof
Suppose that \(x^0\) is not a \(\le _C ^u\)-type multi-scenario set robust solution to (10). Then there exists \( x \in S\setminus \lbrace x^0 \rbrace \) such that \(F_x(\xi ) \le ^u _C F_{x^0} (\xi ) \) for all \(\xi \in U\), but \(F_{x^0}(\xi ^0) \nleq ^u _C F_{x} (\xi ^0)\) for some \( \xi ^0 \in U\). This means that \(F(x,\xi ^0) \le ^u_C F(x^0,\xi ^0)\) but \(F(x^0,\xi ^0) \nleq ^u_C F(x,\xi ^0)\). This contradicts the fact that \(x^0\) is a \(\le _C ^u\)-type highly set robust solution to (10). Hence \(x^0\) is a \(\le _C ^u\)-type multi-scenario set robust solution to (10). \(\square \)
Proposition 19
Consider the set robust optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^l\)-type highly set robust solution to (10). Then \(x^0\) is a \(\le _C ^l\)-type multi-scenario set robust solution to (10).
Proof
The proof follows in a similar way as that of Proposition 18. \(\square \)
Proposition 20
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^u\)-type flimsily set robust solution to (10) with the additional hypothesis that there exists \(\xi ^0 \in U\) such that \(x^0\) is a unique u-minimal solution for \(P(F,\xi ^0,\le _C ^u)\). Then \(x^0\) is a \(\le _C ^u\)-type multi-scenario set robust solution to (10).
Proof
If \(x^0\) is not a \(\le _C ^u\)-type multi-scenario set robust solution to (10), then there exists \( x \in S\setminus \lbrace x^0 \rbrace \) such that \(F_x(\xi ) \le ^u _C F_{x^0} (\xi ) \) for all \(\xi \in U\) but \(F_{x^0}(\xi ^0) \nleq ^u _C F_{x} (\xi ^0)\) for some \( \xi ^0 \in U\). But \(F_x(\xi ) \le ^u _C F_{x^0} (\xi )\) for all \(\xi \in U\) implies \(F_{x}(\xi ^0) \le ^u _C F_{x^0} (\xi ^0)\), that is, \(F(x,\xi ^0) \le _C ^u F(x^0,\xi ^0)\), which contradicts the fact that \(x^0\) is a unique u-minimal solution of \(P(F,\xi ^0,\le _C ^u)\). Hence \(x^0\) is a \(\le _C ^u\)-type multi-scenario set robust solution to (10). \(\square \)
Proposition 21
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^l\)-type flimsily set robust solution to (10) with the additional hypothesis that there exists \(\xi ^0 \in U\) such that \(x^0\) is a unique l-minimal solution for \(P(F,\xi ^0,\le _C ^l)\). Then \(x^0\) is a \(\le _C ^l\)-type multi-scenario set robust solution to (10).
Proof
The proof follows in a similar way as that of Proposition 20. \(\square \)
3.5.3 Multi-scenario and min–max/optimistic set robust solution
Proposition 22
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^u\)-type multi-scenario set robust solution to (10). Suppose that F is U-coordinated u-decreasing. Then \(x^0\) is a min–max set robust solution to (10).
Proof
Let \( x \in S\) be such that \(F_U(x) \le ^u _C F_U (x^0) \). Since F is U-coordinated u-decreasing, \(F(x,\xi ) \le ^u _C F ({x^0},\xi ) \) for all \(\xi \in U\), that is, \(F_x(\xi ) \le ^u _C F _{x^0}(\xi ) \) for all \(\xi \in U\). Since \(x^0\) is \(\le _C ^u\)-type multi-scenario set robust solution, we have \(F_{x^0}(\xi ) \le ^u _C F _{x}(\xi )\) for all \(\xi \in U\). But this implies that \(F_U(x^0) \le ^u _C F_U (x) \). This is true for any \(x\in S\) with \(F_U(x) \le ^u _C F_U (x^0)\). Hence \(x^0\) is a min–max set robust solution to (10). \(\square \)
Proposition 23
Consider the robust set-valued optimization problem (10). Let \(x^0 \in S\) be a \(\le _C ^l\)-type multi-scenario set robust solution to (10). If F is U-coordinated l-decreasing, then \(x^0\) is an optimistic set robust solution to (10).
Proof
The proof follows in a similar way as that of Proposition 22. \(\square \)
References
Bitran, G.R.: Linear multiple objective problems with interval coefficients. Manag. Sci. 26(7), 694–706 (1980). https://doi.org/10.1287/mnsc.26.7.694
Ben-Tal, A., Nemirovski, A.: Robust convex optimization. Math. Oper. Res. 23(4), 769–805 (1998). https://doi.org/10.1287/moor.23.4.769
Ben-Tal, A., Ghaoui, L.E., Nemirovski, A.: Robust Optimization. Princeton University Press, Princeton (2009)
Beck, A., Ben-Tal, A.: Duality in robust optimization: primal worst equals dual best. Oper. Res. Lett. 37(1), 1–6 (2009). https://doi.org/10.1016/j.orl.2008.09.010
Botte, M., Schöbel, A.: Dominance for multi-objective robust optimization concepts. Eur. J. Oper. Res. 273, 430–440 (2019). https://doi.org/10.1016/j.ejor.2018.08.020
Crespi, G.P., Kuroiwa, D., Rocca, M.: Quasiconvexity of set-valued maps assures well-posedness of robust vector optimization. Ann. Oper. Res. 251, 89–104 (2017). https://doi.org/10.1007/s10479-015-1813-9
Ehrgott, M., Ide, J., Schöbel, A.: Minmax robustness for multi-objective optimization problems. Eur. J. Oper. Res. 239, 17–31 (2014). https://doi.org/10.1016/j.ejor.2014.03.013
Goerigk, M., Schöbel, A.: Algorithm engineering in robust optimization. arXiv:1505.04901v3 [math.OC] (2016)
Hamel, A.H., Heyde, F.: Duality for set-valued measures of risk. SIAM J. Financ. Math. 1(1), 66–95 (2010). https://doi.org/10.1137/080743494
Hamel, A.H., Heyde, F., Rudloff, B.: Set-valued risk measures for conical market models. Math. Financ. Econ 5(1), 1–28 (2011). https://doi.org/10.1007/s11579-011-0047-0
Hamel, A.H., Heyde, F., Löhne, A., Rudloff, B., Schrage, C.: Set optimization—a rather short introduction. In: Hamel, A.H., Heyde, F., Löhne, A., Rudloff, B., Schrage, C. (eds.) Set Optimization and Applications—the State of the Art. Springer Proceedings in Mathematics and Statistics, vol. 151, pp. 65–141. Springer, Berlin (2015)
Hamel, A.H., Kostner, D.: Cone distribution functions and quantiles for multivariate random variables. J. Multivar. Anal. 167, 97–113 (2018). https://doi.org/10.1016/j.jmva.2018.04.004
Hamel, A.H., Löhne, A.: A set optimization approach to zero-sum matrix games with multi-dimensional payoffs. Math. Methods Oper. Res. 88, 369–397 (2018). https://doi.org/10.1007/s00186-018-0639-z
Ide, J., Köbis, E., Kuroiwa, D., Schöbel, A., Tammer, C.: The relationship between multi-objective robustness concepts and set-valued optimization. Fixed Point Theory Appl. (2014). https://doi.org/10.1186/1687-1812-2014-83
Ide, J., Schöbel, A.: Robustness for uncertain multi-objective optimization: a survey and analysis of different concepts. OR Spectr. 38, 235–271 (2016). https://doi.org/10.1007/s00291-015-0418-7
Khan, A.A., Tammer, C., Zălinescu, C.: Set-Valued Optimization—An Introduction with Applications. Springer, Berlin (2015). https://doi.org/10.1007/978-3-642-54265-7
Kuroiwa, D., Tanaka, T., Ha, T.X.D.: On cone convexity of set-valued maps. Nonlinear Anal. Theory Methods Appl. 30(3), 1487–1496 (1997). https://doi.org/10.1016/S0362-546X(97)00213-7
Kuroiwa, D.: On natural criteria in set-valued optimization (dynamic decision systems under uncertain environments). In: Department Bulletin Paper, Kyoto University 1048, pp. 86-92. http://hdl.handle.net/2433/62183
Kuroiwa, D.: On set-valued optimization. Nonlinear Anal. Theory Methods Appl. 47, 1395–1400 (2001). https://doi.org/10.1016/S0362-546X(01)00274-7
Kuroiwa, D.: Existence theorems of set optimization with set-valued maps. J. Inf. Optim. Sci. 24(1), 73–84 (2003). https://doi.org/10.1080/02522667.2003.10699556
Kuroiwa, D., Lee, G.M.: On robust multiobjective optimization. Viet. J. Math. 40(23), 305–317 (2012)
Klamroth, K., Köbis, E., Schöbel, A., Tammer, C.: A unified approach to uncertain optimization. Eur. J. Oper. Res. 260(2), 403–420 (2017). https://doi.org/10.1016/j.ejor.2016.12.045
Luc, D.T.: Theory of vector optimization. Lectures Notes in Economics and Mathematical Systems 319, Springer, Berlin (1989). https://doi.org/10.1007/978-3-642-50280-4
Löhne, A.: Vector Optimization with Infimum and Supremum. Springer, Berlin (2011)
Nehring, K., Puppe, C.: Continuous extensions of an order on a set to the power set. J. Econ. Theory 68(2), 456–479 (1996). https://doi.org/10.1006/jeth.1996.0026
Acknowledgements
The authors are indebted to the referees for their invaluable suggestions and comments that have substantially improved the paper. The first author thanks National Board for Higher Mathematics, India (Ref. No.: 2/39(2)/2015/NBHM/R& D-II/7463) for financial assistance. The second author thanks the Department of Science and Technology (SERB), India, for the financial support under the MATRICS scheme (MTR/2017/000128).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Som, K., Vetrivel, V. On robustness for set-valued optimization problems. J Glob Optim 79, 905–925 (2021). https://doi.org/10.1007/s10898-020-00959-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10898-020-00959-z