
Abstract
New approach to design active kinematic pairs, transforming resonant non-harmonic periodical vibrations into continuous motion is presented. The specifics of a piezoelectric motor utilizing this approach is that it can be made with limited size of arbitrary cross-section. Some examples of this type of piezomotor are presented, allowing creating miniature in-plane positioning systems and angular scanning systems. Examples of multi-degree-of-freedom piezomotors in mass-consumer devices are shown by “smart” toy prototypes made from standard LEGO™ construction blocks and mini figures.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Rapid application of mechatronics in industrial, medical, electronics and consumer markets creates greater demand for a new generation of compact, simple, low cost, less power consuming and smart actuators with nanometer resolution. Piezomotors can meet all these demands due to their high power to weight ratio, absence of speed reduction gears, nearly zero electromagnetic noise, no backlash, scalability, simplicity and sensing capabilities. Presently their main applications are directed for optics adjustment devices, mass-consumer photo and video cameras, some application in mobile phones, though some characteristics make them attractive for almost any task, related to precise positioning on the plane or 3-D volume. Piezomotors are especially attractive for small toys and robotic systems, where conventional actuators could be unacceptable.
Piezoelectric motors transforming non-harmonic oscillations
Piezoelectric motors based on the transformation of non-harmonic oscillations (inertial piezomotors) are particularly capable of miniaturization and actuation in limited spaces, because of their simple design (characteristic example is given in Fig. 1) [1–6]. There are a few commercialized or experimental inertial piezomotors (Fig. 2), but all of them operate in quasistatic mode. In order to increase the efficiency of inertial piezomotors, we proposed a resonant driving method. In this case piezoelectric actuator generates non-harmonic (saw-tooth) resonant oscillation by superimposing multiple oscillation harmonics. It is well known from Fourier transformation that saw-tooth oscillation can be comprised of multiple harmonics:
where ω—frequency of a first harmonic, n—number of harmonics.

Inertial piezomotor’s schematic (a) and prototype (b)

Quasistatic inertial piezomotors from Minolta™ (a), Kleindiek™ (b) and New Focus™ (c)
To simplify the design, only two longitudinal modes (Fig. 3) were chosen for a rotational motor prototype (Fig. 1).

Approximation of saw-tooth oscillations comprised of two harmonics (a); experimental response of an actuator (b) and its Fourier-transformation (c)
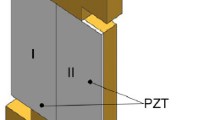
Bulk piezoceramic actuator (Fig. 1) has two pairs of electrodes, which are excited by synchronized harmonic voltage signals at first and second resonant longitudinal modes. Rotation is reversed by shifting the phase of second signal by 180° in relation to the first one. Experiments made using 60 × 3 × 3 mm sized piezoelectric plate, excited at 28 and 56 kHz, proved its feasibility (Fig. 1b).
In order to simplify electrical circuit and obtain oscillation shape as close to saw-tooth as possible, there is a possibility to drive actuator by a single saw-tooth electrical signal, exciting all corresponding resonant frequencies of the actuator at the same time. It should be taken into consideration that using this approach there are some problems in controlling amplitudes of the higher harmonics. These problems can be solved by varying shape of an actuator, applying a constant voltage/strain at dedicated electrodes or by applying (removing) masses at oscillation nodes of the actuator.
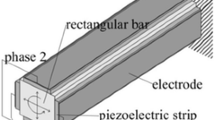
The main advantage of such actuator is that it does not have strict dimensional and contact area constraints (only the length of the actuator depends on the desired performance) and can be effected having small dimensions in two directions (like ordinary needle). Other interesting feature of such actuator is that both its ends generate forces, driving slider in the same direction (Fig. 4). Due to the mentioned characteristics the actuator is most suitable for high precision linear actuation, where limited cross-section size of the actuator is a must (e.g. in matrix manipulators for Braille devices, in which the distance between axes of the sliders in a form of a needle are in the order of 2.5 mm).

Actuator’s strains (a), speeds (c, d) and synchronization (e) with first and second longitudinal modes superimposed; strains (b), speeds (c)(same for “L” and “R”) and synchronization (f) with second and fourth longitudinal modes superimposed; motor’s prototype (g)
Multi-degree-of-freedom ultrasonic motors for mass-consumer devices
The application of multi-degree-of-freedom application in “smart” toys is illustrated by a piezo-actuated LEGO™ construction block and mini figure prototypes (Figs. 5, 6 and 7). As the first approach to creating “smart” LEGO™ component, a problem of moving a standard LEGO™ mini figure on a passive plane has been chosen (Fig. 5). It was accomplished by mounting a tiny (6 × 5 × 6 mm, D × d × h) piezoceramic cylinder into a leg of the small figure (the height of the figure was 38 mm). Permanent neodymium magnet has been placed inside the cylinder to ensure stability of the figure on a ferromagnetic plate. Electrical interface consists of ground electrode on the outer surface of the cylinder and inner electrode sectioned into three symmetrical parts (3 × 120°). The configuration of the electrodes enables generation of three component oscillations in the contact zone between the cylinder and the passive plane, leading to reversible rotation or desired displacement on the plane.

Prototype of the “smart” minifigure

Prototype (a) and schematic (b) of the rotational “smart” brick

Top (a), bottom (b) and setup (c) views of the three degree-of-freedom “smart” brick
Two modifications of a standard LEGO™ brick have been developed and tested (Figs. 6, 7). In the first modification (Fig. 6) passive brick is transformed to rotating component of the toy. Such motor is made only of piezoceramic ring and two plastic components. Its operation is based on traveling wave, excited in 20 × 15 × 3 mm (D × d × h) piezoceramic ring by electrical signals with 90° phase shift (Fig. 6b). Initial characteristics of the motor: up to 300 RPM; ≈0.001 Nm torque, depending on initial elastic force; 9 V DC power supply; 18...40 V on the electrodes of piezoceramics.
Second modification (Fig. 7) transforms the brick to the three degree-of-freedom positioning stage on a plane. Piezoceramic plate has three pins (Fig. 7b) (corresponding to three pairs of electrodes), ensuring stability and contact of oscillating pins with the plane. Such design is made only of casing and piezoelement.
Very simple design of three degree-of-freedom piezoelectric motors for translation/rotation on a passive planar surface has been investigated (Fig. 8). Motors were made from standard tweeters, consisting of thin brass metal disc with piezoceramic disc fixed on it. Electrical interface consisted of sectioned electrode (3 × 120°) on top of the piezoelectric disc and ground electrode on the metal disc. Configuration and number of the electrodes enables oscillations that lead to desired displacement on a plane. Rotation on the plane is produced when traveling wave oscillations are generated in the piezoelectric disc. To exclude acoustic noise, higher forms of oscillations were generated. Frequency of electrical signal was in the range of 65...80 kHz, the voltage—30...80 V. Most experiments were carried out using piezoelectric discs with 10 mm diameter and 0.1 mm thickness.

Top (a) and bottom (b, c) views of the three degree-of-freedom simplified motor
The concept of linear positioning on a plane is shown by a multilayer piezoceramic actuator, excited at first longitudinal and second bending (in-plane) modes (Fig. 9b, frequency range 45...80 kHz), resulting in elliptical oblique impacts at the contact zones. Again, in order to ensure the stability of the piezoelectric actuator on a ferromagnetic plane, two neodymium magnets were attached to the ends of the actuator (Fig. 9a). This type of piezoelectric motor could be used as a module to actuate any object, both in a toy industry and for more general applications in mini and micro-robotics. Velocity of the motion could easily reach the value of 0.8 m/s, which practically covers velocity range required for all presently known applications.

Prototypes (a) and schematic (b) of the linear piezoelectric motor
Conclusions
New approach related to resonant non-harmonic vibration excitation in piezoelectric actuators was proposed. The possibility to apply multi-degree-of-freedom piezomotor in mass-consumer devices has been demonstrated by standard LEGO™ toys and components.
References
R. Bansevicius, Latest Trends in the Development of Piezoelectric Multi-Degree-of-Freedom Actuators/Sensors, Responsive systems for active vibration control: NATO Science Series (Kluwer, Dordrecht, 2002), pp 207–238 ISBN 1-4020-0897-X(HB) 85
K. Ragulskis, R. Bansevicius, R. Barauskas, G. Kulvietis, Vibromotors for Precision Microrobots (Hemisphere Publishing, USA, 1988), 310 p, ISBN 0-89116054905
Y. Yamagata, T. Higuchi, A Micropositioning Device for Precision Automatic Assembly using Impact Force of Piezoelectric Elements, Robot. Autom. 1995 1, 666–671 (1995)
T. Morita, R. Yoshida, Y. Okamoto, T. Higuchi, Three DOF parallel link mechanism utilizing smooth impact drive mechanism, Precis. Eng. 26, 289–295 (2002)
J.-L. Haa, R.-F. Fungb, C.-S. Yang, Hysteresis identification and dynamic responses of the impact drive mechanism, J. Sound Vib. 283, 943–956 (2005)
F.S. Luecke, A. Tuganov, Piezoelectric actuator for optical alignment screws, US Patent no. 5410206 (1995)
Acknowledgements
This research has been financed by EU MINUET project “Miniaturized Ultrasonic, Engineered-Structure and LTCC-Based Devices for Acoustics, Fluidics, Optics and Robotics” (FP6-NMP).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Bansevicius, R., Blechertas, V. Multi-degree-of-freedom ultrasonic motors for mass-consumer devices. J Electroceram 20, 221–224 (2008). https://doi.org/10.1007/s10832-007-9178-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10832-007-9178-3