
The state of development and production of test and control equipment with nano- and microsize resolution is investigated. The results of the development analysis are presented, the classification of piezoactuators and piezomotors of the leading manufacturers is compiled. The most characteristic structures of piezoelectric motors are considered. It is shown that stepped piezoelectric motors satisfy the requirements imposed on the actuators of test and control equipment.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
When conducting scientific research and manufacturing of modern devices that use nano- and micro-electromechanical systems (NEMS, MEMS), it is required to provide operation with objects of nanometer size. Monitoring with micro-, nanoand submicron precision is required for the manufacture of parts, testing, validation of various physical characteristics, and also during assembly of units, blocks and finished products from these parts. Mutual positioning of the object or blank with the working body of the test, production equipment or instrument is mandatory. High accuracy is needed for testing and controlling products manufactured by other technologies, and during assembly work. The accuracy of operating mechanisms (actuators) and monitoring data determines the functional effectiveness of the control systems and the accuracy of positioning of objects.
Promising production of MEMS, NEMS, and nanostructured materials is being actively developed in Russia. However, this process is impeded, in particular, due to the lack of domestic test equipment with nanometer resolution. Imported equipment is expensive, highly specialized and does not fully meet given objectives. Modern types of equipment and their characteristics are given in Table 1.
As operating mechanisms in research and test equipment for nano- and micro-displacements, instead of the traditional electromechanical systems (collector, stepper and brushless microelectro-motors), piezoactuators and piezomotors based on them are currently used, which have significant advantages over electric motors. For micro-displacements at ultra-low speeds, electric motors operate in unstable modes, which is manifested in irregular positioning oscillations of the object in the direction of motion. The nonlinearities of kinematical transmissions (backlash, dry friction, zones of insensitivity, etc.) have a significant effect on the operation of micro-electromotors. The miniaturization of such devices has almost reached the limit. Piezomotors have the following advantages: high positioning accuracy (up to fractions of a nanometer); self-braking in the absence of input power; operability in ultrahigh vacuum; low power consumption; high power-to-mass ratio, providing a fast response; absence of electromagnetic radiation.
The leading foreign manufacturers of piezodrives for nano- and micro-displacements are Physic Instrumente (Germany), New Scale Technologies (USA), Cedrat Technologies (France), Discovery Technology International (USA), Morgan Technical Ceramics (UK), Noliac Group (Denmark), Piezo Kinetics Inc. (USA), Piezo Systems Inc. (USA), Piezomechanik GmbH (Germany), Piezosystem jena (Germ any), Omega Piezo Technologies Inc. (USA), TRS Technologies Inc. (USA), Ceram Tec (Germany), Johnson Matthey Catalysts (Germany), Kinetic Ceramics Inc. (USA), AEI (USA), Ferroperm Piezoceramics A/S (Denmark), APC International, Ltd (USA), NEC TOKIN Corporation (Japan), EPCOS (a member of TDK-EPC Corporation, Japan), and others.
In Russia, there are relatively few piezoelectric, piezoactuator and piezoelectric engine manufacturers and developers. It is possible to single out such enterprises as Research Institute Elpa (Zelenograd, Moscow), Aurora-Elma (Volgograd), NKTB Piezopribor YuFU (Rostov-on-Don), Priboy (Taganrog), ZVEK Progress (Krasnodar), COMNET (Voronezh), and PO Start im. Protsenko (Zarechny, Penza region). The market for piezoactuators and piezoelectric motors is constantly growing, but not saturated with domestic products.
Mechanical displacement in piezoactuators is realized by inverse piezoelectric or piezomagnetic effects [1,2,3,4,5,6]. An analysis of the developments of leading manufacturers has shown that for nano- and micro-displacements a promising direction is the creation of piezoactuators and piezoelectric motors based on the piezoelectric effect. Piezoactuators based on the piezomagnetic effect have a limited scope of application, since they are sensitive, in contrast to the former, to the action of external magnetic fields (without taking additional measures).
A piezoactuator is understood as a piezoelectric device designed to activate and control mechanisms or systems based on the piezoelectric effect. In the simplest case, a piezoactuator is called a piezoelectric element fixed in some definite way. A piezoelectric motor or piezomotor is a device that converts electric energy into mechanical energy; moreover, the mechanical displacement is caused by the piezoelectric effect. In foreign and domestic literature, piezoactuators are understood as individual piezoelements and piezoelectric motors (piezomotors), are sometimes conjoined with an electronic control device.
The actuator, i.e., the actuating mechanism, is an integral part (a functional block) of the operational device, which is designed to control the executive body in accordance with the command information [7]. The executive device in automatic control and regulation systems is understood to be the automatic control or regulation system unit that affects the process in accordance with the received command information. Such a device must consist of an actuator, a regulating organ, and can also be equipped with additional blocks, for example position sensors, latches, positioners, etc.
The piezoelectric motor can also belong to the executing mechanism, since it acts on the actuator in the automatic control or regulation system if a signal carrying command information is fed to its input. The actuator may include a transfer device (reducers, couplings, etc.) and a node of limit breakers or switches. The piezoactuator and the piezoelectric motor can be parts of a piezodrive – a device for driving machines and mechanisms. Typically, the drive consists of an energy source, a mechanism for the transmission of energy (motion) and control equipment. In the case under consideration, the piezoactuator and piezoelectric motor should be considered as a source of mechanical energy.
Thus, piezoactuators and piezoelectric motors (piezomotors) are mechanisms of actuators, as well as sources of mechanical energy. Piezoactuators consist of one or more piezoelements, connected in a certain way and intended to convert electrical (or magnetic) energy into mechanical energy. Piezoelectric motors (piezomotors) consist of piezoactuators, i.e., energy converters and other elements enclosed in a common housing, and allow the realization of a device with new properties for converting electric (or magnetic) energy to mechanical.
In Fig. 1, there is presented the classification of piezoelectric motors for nano- and micro-movements by the most characteristic features. This classification is based on the research results of the leading foreign and domestic producers of piezo actuators and piezoelectric motors.

Classification of piezomotors for nano- and micro-displacements.
Piezomotors (piezoactuators) operating at low frequencies of the control signal, that is, below their resonant frequency, belong to the pre-resonance frequency, and at high frequencies (equal to resonant frequencies) to resonance frequencies. According to the nature of the movements created, the piezoelectric motors can be linear or rotary. Depending on the supply voltage, piezoactuators are divided into low-voltage (up to 150–200 V) and high-voltage (up to 1000 V). There are two power modes: unipolar and bipolar. The bipolar mode enables the increase of the working stroke and force by 30%. According to the principle of their action, piezoelectric motors can be divided into impact devices (vibrating motors, resonant), deformation (stepping motors) and power action (power motors). In the first case, the movable part of the engines starts to move from the impacts emanating from the piezoelectric cell with the frequency of natural oscillations (resonance frequency). In the second case, the movable part moves successively with a certain step due to a change in the stress-strain state of its elements under the influence of piezoelements. In the third case, the force excitation directly (or via a transmission link) is transmitted to the object from the piezoelectric element, with angular or linear displacements in a limited range.
Depending on the directions of the piezoelectric effects used, the design, purpose, etc., the following types of piezoactuators have become widespread: pivoted bending piezoceramic bimorphs and multimorphs (mode d 31), monoblock and packet (axial mode d 33, transverse mode d 31), differential, flexible-tension, shearing, laminar strip, with an integrated lever displacement amplifier, controlled piezoelectric, tubular.
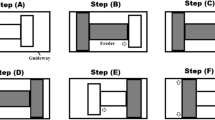
Let us consider the most characteristic structures of piezoelectric engines, whose features constitute the presented classification. In Fig. 2 we show the structure of the pre-resonance piezoelectric motor created at the PO Start [8]. This engine has an H-shaped group of piezoelements – one running gear and two brake elements with tips made of wear-resistant ceramics. The brake piezoelements are controlled by quasi-rectangular signals, and the driving piezoelements are saw-tooth. This makes it possible to realize the principle of fragmenting the step and stop the piezoelectric motor at any voltage step forming the running saw. The working cycle of such a piezoelectric motor consists of several stages. The first braking actuator is activated and clamped by one end of the driver. The actuator-propulsor is energized, and it, too, is activated and lengthens. The second braking actuator, after the maximal propulsion step, clamps it. The voltage is released from the first braking actuator, while the actuator unlocks the propulsion unit. The driver is compressed in the direction of movement and the process is repeated.

Pre-resonance stepped piezoelectric motor: 1) load connection point; 2) friction tips; 3) braking piezoelements; 4) moving piezoelectric element.
Consider a variant of the construction of a piezoelectric motor in which the body with piezo actuators is stationary, and the rod moves. Applying new design solutions, it was possible to minimize the overall dimensions of the piezoelectric motor. The main characteristics of such a device are: a stroke of 50 mm, a minimum displacement step of about 1 nm, an accuracy of 10 nm, a supply voltage of 30–100 V, a maximal displacement speed of 0.5 mm/sec, a pulling force of at least 50 N, overall dimensions of the piezo drive – no more than 38 × 22 × 5 mm.
The developments at Cedrat Technologies (France) are of interest. This company produces both pre-resonance single-step amplifying piezo drives as well as resonant piezoelectric motors. The amplifying one-step piezo drive APA 1000XL is a piezo actuator with an increased stroke step compared to a single piezo actuator. The principle of its operation is based on the expansion of the elastic frame by a packet piezoactuator; the working displacement is increased due to the effect of the lever. The elastic frame realizes the preliminary compression of the piezoactuator. Such devices have a relatively large range of displacement (~1000 μm) combined with considerable traction and compact size. The stroke is less than 1% of the entire range, and its length can reach more than 1 mm. In the line of single-step piezo drives, there are models with a stroke of 25 μm to 1 mm, a stroke step of 0.28–10.50 nm and a pulling force 18–1300 N. Overall dimensions of the APA 25XS are 6.0 × 12.9 × 9.0 mm; and the APA 1000XL, 57.0 × 214.3 × 21.0 mm [9].
The principle of operation of the resonant piezo drive UPD20 of the same company is shown in Fig. 3. The main working elements of this piezo drive are the stator housing, multilayer piezoelectric elements (piezopackets), the central inert mass. The casing pre-presses piezopackets. With their expansion-contraction, the opposite contact zones of the stator can perform vibratory oscillations of four types: elliptical, normal, tangential, inclined. The piezo drive is controlled when one or two-phase sinusoidal voltages are applied to the piezo package, and the trajectory of the stator contact zone is determined by the frequency or phase difference of the control signals. The blocking force of the piezo drive in the absence of a control voltage is slightly greater than the blocking force of the piezopackets. Characteristics of the device: the stroke is limited by the length of the slide (rotor), frequency 22.5 kHz, voltage 10 V, power 12 W, overall dimensions 42 × 26 × 42 mm.

Illustration of the operating principle of the resonant piezo drive UPD20 from Cedrat Technologies: 1) moving node (line node or table); 2) elliptic trajectory of the stator contact point; 3) stator contact point; 4) stator casing; 5) piezopackets; 6) central inert mass.
Based on the resonant piezo drives UPD20 and UPD60, a linear drive, a linear piezomotor LPM20-3, and a rotary piezomotor RPM60 [9] have been created. Characteristics of LPM20-3: stroke 3 mm, stroke step 3 μm, pulling force 20 N, speed 100 mm/sec, overall dimensions 80 × 80 × 66 mm. Characteristics of RPM60: stroke step 3 μm, torque 7 mN·m, speed 1000 rpm, overall dimensions 20 × 20 mm.
Pre-resonance piezomotors – one-step amplifying and stepping, as well as resonant – are produced by Physik Inst rumente, Germany. The one-step reinforcing piezoelectric motor P-601.1S has a stroke of 0.1 mm, stroke step 2 nm (0.2 nm with built-in meter), pulling force 10 N, speed 3.6 mm/sec, overall dimensions 46.5 × 16.5 × 12.0 mm [10]. The original designs of step-type pre-resonance linear piezo motors of this company are: N-111 NEXLINE(r) Linear Actuator and the N-310 NEXACT(r) OEM Miniature Linear Motor. The principle of their action is based on the patented technology PiezoWalk and is that four groups of piezoactuators perform step-by-step motions. In this case, the expansion-compression of the clamping piezoactuators and the shift of the running ones-takes place in a definite sequence. There are two versions of this technology: NEXLINE and NEXACT. The latter differs in that the piezoactuators perform bending movements. Characteristics of N-111: 10 mm stroke, stroke step 5 nm (0.025 nm with built-in measuring instrument), pulling force 50 N, speed 0.6 mm/sec, overall dimensions 0.5 × 46 × 28 mm. Characteristics of N-310: stroke 10–125 mm, stroke step from 5 nm to micrometers (0.03 nm with built-in meter), pulling force 10 N, speed 10 mm/sec, overall dimensions (60–165) × 25 × 12 mm.
Examples of resonant linear piezomotors by Physik Instrumente: single-axis positioner M-663, rack-and-pinion piezoelectric motor U-264. Components of the piezoelectric motor: fixed piezoactuator, with a piezo plate with electrodes and a pusher tip, pushed from the sides, and also a movable slide. When applying pulsed voltage to the electrodes with a frequency of 100–200 kHz, the pusher tip performs periodic diagonal motions and moves the slider. In the absence of a control voltage, the slider is pinched and fixed, since there is a frictional force between it and the tip. Characteristics of the M-663 single-axis positioner: stroke 18 mm, stroke step ± 0.5 μm, (0.1 μm with integrated meter), pulling force 2 N, speed 250 mm/sec, overall dimensions 35 × 35 × 15mm. Characteristics of the rack piezoelectric motor U-264: stroke 50–150 mm (limited slider length), stroke step 100 nm, tractive force 7 N, speed 250 mm/sec, overall dimensions 63.1 × 57.0 × 10.2 mm (without slider).
There are noteworthy developments at the firm New Scale Technologies (USA), in particular, the basic model of the resonant linear piezo engine SQL-RV-1.8 SQUIGGLE motor. The principle of its operation is based on the patented technology SQUIGGLE [11]. The design of this piezomotor consists of a stator (a four-sided metal clutch with internal thread), a lead screw screwed into the clutch, and four piezoceramic plates attached to the faces of the clutch. The model is controlled by sinusoidal electric voltages, shifted by 90° and fed to piezoelectric plates. The resulting mechanical oscillations are transmitted to the metal clutch, which performs wave motions. This leads to the appearance of compression forces with rotation at the boundary of the surfaces of the clutch and screw, as a result of which the screw rotates, moving linearly with respect to the clutch. Changing the phase shift, one can change the direction of the motion of the screw. Specifications of the SQL-RV-1.8 SQUIGGLE motor: stroke 6 mm (limited by the length of the screw), stroke step 500 nm, pulling force 0.33 N, speed 7 mm/sec, overall dimensions 2.8 × 2.8 × 6.0 mm.
Original developments of resonant piezoelectric motors are available from Discovery Technology International, USA. It specializes in resonant rotor piezoelectric motors, but also produces linear ones. Rotary reversible piezoelectric motors are represented by models PM-20RS, PM-46RS. They include a tubular piezoresonator with a casing (vibrating shell), on which are fixed pusher plates and a rotor. When a sinusoidal voltage is applied to the piezoresonator, a standing wave is excited in the casing, leading to oscillations of the pushers, while elliptical motions are performed. Since the pushers are pressed against the rotor, at the moment of each movement a small angular displacement of the rotor occurs. Specifications of the PM-20RS: angular displacement step 1 arc-sec, torque 0.1 N·m, rotation speed 60 rpm, overall dimensions 38 × 100 mm. Specifications of the PM-46RS: discrete angular displacement step 0.3 arc-sec, torque 1.8 N·m, rotation speed 20 rpm, overall dimensions 80 × 80 mm [12].
The analysis of literature and patent sources has shown that the areas of application of piezoactuators and piezoelectric motors are rapidly expanding. These devices are used in metrology, test and control equipment for industry, nano- and microscopy, in nano- and micro-technologies (microlithography), nano- and micromanipulators, microrobots, biotechnologies, astronomy, in space research, laser beam control devices (laser drive resonators), etc. Piezoactuators and piezoelectric motors based on the piezoelectric effect are very promising for their use in test and control equipment with nano- and microsize resolution. Step piezoelectric motors largely meet the requirements imposed on the actuators of the test and control equipment.
The importance of solving problems aimed at creating piezo actuators and piezomotors with nano- and micrometer resolution for research and test equipment in order to strengthen the competitive positions of domestic producers is high. At present and in the future, the creation of new piezoactuators and piezomotors with improved technical characteristics and the improvement of executive devices and nano- and micro-positioning systems on their basis will remain a very urgent scientific and practical problem.
References
A. A. Bobtsov, V. I. Boikov, S. V. Bystrov, and V. I. Grigor’ev, Implementing Devices and Systems for Microtranslations, ITMO, St. Petersburg (2011).
A. E. Panich, Piezoceramic Actuators. Izd. RGU, Rostov-on-Don (2008).
S. M. Afonin, “Features of electromechanical energy conversion by piezomotors of nanodefl ections,” in: Devices and Systems. Control, Monitoring, Diagnostics, Nauchtekhlitizdat, Moscow (2012).
J. Roel and E. Merry, Performance-Driven Control of Nano-Motion Systems, Eindhoven University of Technology (2009).
P. A. Mackeyville, Piezoceramics Actuator: Principles and Applications, APC International (2011).
A. G. Amel’chenko, V. A. Bardin, and V. A. Vasiliev, “Control systems and elements of a reinforcing piezoelectric actuator for precise positioning,” Izv. Vuz. Povolzh. Region. Tekhn. Nauki, No. 3 (35), 106–119 (2015).
GOST 14691-69, Executive Devices for System of Automatic Regulation.
A. G. Amel’chenko, V. A. Bardin, V. A. Vasil’ev, et al., “Precision positioning device with nanometer resolution,” Information Materials in Science and Industry, ITNP-2013: Proc. All-Russ. Sci. Techn. Conf., Cedrat Technologies, www.cedrat-technologies.com, acces. 12.05.2015.
Physik Instrumente, www.physikinstrumente.com, acces. 12.05.2015.
New Scale Technologies, www.newscaletech.com, acces. 12.05.2015.
Discovery Technology International, www. discovtech.com, acces. 12.05.2015.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Izmeritel’naya Tekhnika, No. 2, pp. 46–51, February, 2017.
Rights and permissions
About this article

Cite this article
Bardin, V.A., Vasil’ev, V.A. & Chernov, P.S. Piezoactuators and Piezomotors with Nano- and Micro-Dimensional Resolution for Test and Control Equipment. Meas Tech 60, 166–172 (2017). https://doi.org/10.1007/s11018-017-1168-5
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-017-1168-5