
Abstract
For a plane gravitational wave whose profile is given, in Brinkmann coordinates, by a \(2\times 2\) symmetric traceless matrix K(U), the matrix Sturm–Liouville equation \(\ddot{P}=KP\) plays a multiple and central rôle: (i) it determines the isometries; (ii) it appears as the key tool for switching from Brinkmann to BJR coordinates and vice versa; (iii) it determines the trajectories of particles initially at rest. All trajectories can be obtained from trivial “Carrollian” ones by a suitable action of the (broken) Carrollian isometry group.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The motion of test particles under the influence of a gravitational wave (GW), called the Memory Effect [1, 2], has attracted considerable attention as a potential tool to detect gravitational waves. Approximating a gravitational wave by an exact plane wave reveals, in particular, that particles initially at rest will move, after the wave has passed, with constant but non-vanishing relative velocity: this is the Velocity Effect [3,4,5,6,7,8,9,10,11].
In this Letter we point out the central role played by (i) a matrix Sturm–Liouville equation [12]
where K(U) is the profile of the wave, and (ii) by Carroll(type) symmetry [13, 14]. Equation (1.1) (i) determines the isometries; (ii) appears as the key tool for switching from Brinkmann (B) to Baldwin-Jeffery-Rosen (BJR) coordinates and vice versa; (iii) determines the trajectories of particles initially at rest.
In BJR coordinates the symmetries and the trajectories are both conveniently determined in terms of another matrix, H(u) in (2.8) below. In terms of B coordinates, this role is overtaken by the matrix \(Q=PH\) in (3.5), which satisfies again the Sturm–Liouville equation above.
Generic gravitational waves have long been known to have a 5-parameter isometry group [4, 15, 16], recently identified as the subgroup of the Carroll group with rotations omitted [13, 14, 17].Footnote 1
Carroll symmetry has long been considered as a mathematical curiosity irrelevant for physics, for the good reason that a particle with Carroll symmetry can not move [13, 14, 18,19,20]. In this Letter we point out that (broken) Carroll symmetry does play a fundamental rôle, namely in describing particle motion in a gravitational wave background.
2 Killing vectors and isometries
In Brinkmann (B) coordinates \((\mathbf{X},U,V)\) the profile of a plane gravitational wave is given by the symmetric and traceless \(2\times 2\) matrix \(K(U)=K_{ij}(U)\) [15, 16, 21],
where \({\mathcal {A}_{+}}\) and \({\mathcal {A}_{\times }}\) are the \(+\) and \(\times \) polarization-state amplitudes. Previously we studied : (i) linearly polarized waves: \({{\mathcal {A}_{\times }}}=0\) and \({{\mathcal {A}_{+}}}\) is typically a [derivative of a] Gaussian [8, 9, 22] or a Dirac delta [22, 23]; (ii) circularly polarized sandwich wavesFootnote 2 [11]:
(iii) circularly polarized waves with periodic profile [11]
Throughout this Letter, we limit ourselves to sandwich waves with \(C^1\) profile. Impulsive waves with Dirac delta-function profiles have been studied elsewhere [22, 23].
A particularly clear approach to isometries is that of Torre [24] who pointed out that, in Brinkmann coordinates \((\mathbf{X}, U, V)\), the Killing vectors are
where the dot means d / dU, and where \(S_i,\, i=1,2 \) is a solution of the vector equation
The simplest example is that of Minkowski space, \(K_{ij}\equiv 0\), when (2.5) is solved by \(S_i=\gamma _i+\beta _iU \) and (2.4) is a combination of translations in the transverse plane and two infinitesimal Galilei boost lifted to (2.1) viewed as a Bargmann space [25, 26],
The fifth isometry is the “vertical translation” generated by \({\partial }_V\).
Things become more complicated if the profile is non-trivial. In the linearly polarized case \({\mathcal {A}_{\times }}=0\) with a time independent profile \({\mathcal {A}_{+}}=D\ne 0\) a real constant, for example, transverse translations are no longer isometries. In this simple but rather non-physical (non-sandwich) case Eq. (2.5) decouples into two time-independent equations of the oscillator-form, one of them attractive and the other repulsive, depending on the sign of D. The solution of (2.5) is therefore a 4-parameter linear combinations which mixes \(\sinh ( \sqrt{|D|}\,U) \) and \(\cosh ( \sqrt{|D|}\,U)\) in the repulsive, and \(\sin (\sqrt{|D|}\,U)\) and \(\cos (\sqrt{|D|}\,U)\) in the attractive component. But when \(D\ne {\mathrm{const.}}\), the Sturm–Liouville problem (2.5) has no analytic solution in general, and in the polarized case with time dependent profile everything becomes even worse. Various properties of the Killing vector fields and the group they generate were explored in [27].
The problem of solving the Sturm–Liouville equation (2.5) was circumvented by Souriau [4] who suggested using BJR coordinates [28,29,30] instead, in terms of which the metric may be written as
with \(a(u)=(a_{ij}(u))\) a positive definite \(2\times 2\) matrix, which is an otherwise arbitrary function of “non-relativistic time”, u.Footnote 3 Then natural translations \(\mathbf{x}\rightarrow \mathbf{x}+{\mathbf {c}},\, v\rightarrow v+ w\) are manifest isometries. Moreover, implementing \(\mathbf{b}\in \mathbb {R}^2\) through the \(2\times 2\) matrix valued function
yields two further isometries. Souriau’s form (2.9) allows one to determine the group structure with the remarkable result that the above-mentioned generic 5-parameter isometry group [15, 16] we denote here by G may be identified, for any profile, as the subgroup of the Carroll group with rotations omitted [17].
The transformations (2.9) generated by \(\mathbf{b}\) are, in particular, boosts, implemented in an unusual way. In the Minkowski case \(a=\mathrm {Id}\) is the unit matrix so that \( H_{Mink}(u)=(u-{u_0})\,\mathrm {Id}\, \) and the standard extension of the Galilei group [lifted to flat Bargmann space] is recovered.
3 Brinkmann \(\Leftrightarrow \) BJR
The relation between Brinkmann and BJR coordinates is [12]
where the \(2\times 2\) matrix P satisfies
The first of these is a matrix Sturm–Liouville equation for P. If this is satisfied, then \(P^{T}\dot{P}-\dot{P^{T}}P=0\) is shown to be a constant of the motion. The second equation is therefore satisfied when it holds at an arbitrary moment.
We emphasise that while the B-coordinates are global, the BJR coordinates are valid only in a finite interval: the mapping (3.1) necessarily becomes singular when
The mapping (3.1) trades the quadratic “potential” \(K_{ij}(U){X^i}{X^j}\) in (2.1) for a “time”-dependent transverse metric \(a(u)=\big (a_{ij}(u)\big )\) in (2.7) and vice versa.
When expressed in B coordinates, the natural BJR transverse translations \(\mathbf{x}\rightarrow \mathbf{x}+{\mathbf {c}}\) become “time-dependent translations of the Newton–Hooke form” [31, 32]
Further insight is gained by introducing the \(2\times 2\) matrix
Then combining (2.9) with (3.1) yields, for boosts,
Equation (3.6) can be tested by inserting the Minkowskian values; reassuringly, the usual Galilean expression is recovered. Moreover, a straightforward calculation using (2.8), (3.1) and (3.2) shows that Q satisfies the same matrix Sturm–Liouville equations (3.2) as P does,
Working infinitesimally, only those terms which are linear in \(\mathbf{b}\) contribute, and we recover the rule (2.4) of Torre [24] with \(S_i=P{\mathbf {c}}_i,\, {\mathbf {c}}_1=(1,0)\) and \({\mathbf {c}}_2=(0,1)\) for translations, and \(S_i=Q\mathbf{b}_i\) for boosts, respectively.
4 Trajectories
The G-symmetry implies thatFootnote 4
interpreted as conserved linear and boost-momenta. Reversing these relations, the geodesics may be expressed using the Noetherian quantities above [4, 8, 9],
where
is another constant of the motion, whose sign only depends on the nature (timelike/spacelike or null) of the geodesic. \(v_0\) is a constant of integration. Once the values of the conserved quantities are fixed, the only quantity to be calculated is the matrix-valued function H(u) in (2.8), which thus determines both how the isometries act, (2.9), and also the evolution of causal geodesics, (4.2). H(u) is in turn related to the Sturm–Liouville solution P in (3.2). In flat Minkowski space \(H(u)=u\,\mathrm {Id}\) yields free motion, \( \mathbf{x}(u)=(u-u_0)\,{\varvec{p}}+\mathbf {k},\, v(u)= (u-u_0)(-\frac{1}{2}{\vert {\varvec{p}}\vert }^2 +e)+ v_0. \)
Returning to the general metric (2.7), requiring that our particles be at rest before the gravitational wave arrives implies, by (4.1), \({\varvec{p}}=0\) for all profiles:
With tongue-in-cheek, we call it “Carrollian”, since there is no (transverse) motion—the hallmark of “Carrollian” physics [13, 14, 18,19,20].Footnote 5
Remarkably, every geodesic is obtained from a simple one of the form (4.4) by a suitable symmetry transformation [3, 4, 17]. Equation (4.2) says indeed that any geodesic determines and is, conversely, determined by six constants of the motion. Then we note that the isometry group G acts on the constants of the motion \(\Phi =({\varvec{p}},\mathbf {k},e,v_0)\) according to [4, 17]
This action leaves e in (4.3) invariant, however for any fixed value of e we can find an appropriate element of G which brings \(\Phi =({\varvec{p}},\mathbf {k}, e, v_0)\) to \(\Phi _0=({\varvec{p}}=0,\mathbf {k}=0, e, v_0=0)\). Conversely, any given set \(\Phi \) can be reached from \(\Phi _0\) by the action of an isometry. The geodesic with parameters \(\Phi _0\) is (4.4) with \(x_0=0\) and \(v_0=0\), for which the trajectory is simply \( \mathbf{x}(u)=0\,,\; v(u) = (u-{u_0})\,e. \) Conversely, the geodesic with parameters \(\Phi \) is obtained in turn by implementing the \(\Phi _0\rightarrow \Phi \) isometry as in (2.9), as illustrated on Fig. 3 of [17].
One can wonder how all this looks in B coordinates. The answer can be obtained by “exporting” the trajectories from BJR to B using (3.1).Footnote 6 Choosing \(\mathbf{X}_0=\mathbf{x}_0\) in the before zone,
which, for \(\mathbf{X}_0=0\) and \(v_0=0\), remains “Carrollian” in that \( \mathbf{X}(U)\!=\!0,\, V(U)\!= \!(U-{U_0})\,e. \)
5 Illustration: polarized sandwich waves
Let us indeed consider a circularly polarised oscillating sandwich wave with Gaussian envelope (2.2) , shown in Fig.1. The simple \({\varvec{p}}=0\) trajectory (4.4) describes the motion of a particle at rest in the before zone. BJR coordinates are valid between caustics, which appear where \(\det \big (P(u_1)\big )=0\); numerically, we found, in the neighborhood of \(u_0=0\), \(u_1= -\,2.80< u < u_2 = 2.74\); Brinkmann coordinates work for all U.
Then (4.6) can be plotted after solving the Sturm–Liouville eqn (3.2) numerically. Figure 2 shows, however, that even such simple trajectories become complicated-looking, with the exception of the one for \(\mathbf{X}_0=0\).

Polarized sandwich wave with Gaussian envelope as given in (2.2). The colors refer to the \({{\mathcal {A}_{+}}}\) and the \({\mathcal {A}_{\times }}\) polarisation components (color figure online)

The images under the B \(\Leftrightarrow \) BJR map (4.6) of the simple trajectories (4.4) initially at rest for \(u_0<0\) at \(\mathbf{x}_0^1=\mathbf{X}_0^{(1)}=({1},{0})\) and at \(\mathbf{x}_0^{(2)}=\mathbf{X}_0^{(2)}=({0},{1})\), respectively, are, B coordinates, the two columns of the P matrix. The motion is complicated in the inside-zone but follows straight lines with constant velocity in the after-zone
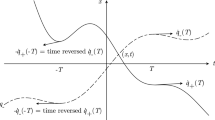
Having calculated (numerically) the matrix P, we can proceed to calculating \(a=P^T\!P\) and then H in (2.8), allowing us to plot finally how boosts are implemented in BJR coordinates in a neighborhood of the origin, \(\mathbf{x}\rightarrow \mathbf{x}+ \delta \mathbf{x},\, \delta \mathbf{x}= H(u)\,\mathbf{b}\), cf. (2.9), shown on Fig. 3. The implementation differs substantially from the Galilean one, \(\delta \mathbf{x}= u\mathbf{b}\).

In BJR coordinates boosts act according to (2.9). The implementation differs substantially from the Galilean one (dashed). We took here \(\mathbf{b}=(1,1)\)
6 Conclusion
The Memory Effect boils down to solving the Sturm–Liouville equation (1.1)—a task which can, in general, be done only numerically.
Particles at rest in the before zone have vanishing momenta, implying that in BJR coordinates the trajectory is trivial : all those complicated-looking trajectories obtained before [8, 9, 11, 22] are in fact images of the trivial “Carrollian” ones in (4.4) resp. (4.6b) by a suitable broken-Carroll isometry [3, 4, 17] : all complications are hidden in the Sturm–Liouville equation (1.1). This can be viewed as the gravitational-wave generalization of the observation that any free non-relativistic motion is obtained from static equilibrium by a Galilei transformation. The “no motion” defect of Carrollian dynamics [13, 14, 18,19,20] is thus turned into an advantage.
Notes
The Carroll group [13, 14] is the subgroup of the Bargmann group with no time translations; the latter is itself the subgroup of the Poincaré group which leaves \({\partial }_V\) invariant. The Bargmann group is a 1-parameter central extension of the Galilei group upon which it projects when translations along V are factored out. For circularly polarised periodic waves the symmetry can be extend to a 6-parameter group [11, 16].
The conserved quantity associated with the “vertical” Killing vector \({\partial }_V\) can be used to show that proper time and u are proportional.
Comparison with the trajectories obtained by solving directly the equations of motion numerically shows a perfect overlapping. This is a third appearance of the solution P of the SL eqn (3.2). In Souriau’s approach it is the determinant of the metric (2.1) which satisfies a Sturm–Liouville equation.
References
Zel’dovich, Y.B., Polnarev, A.G.: Radiation of gravitational waves by a cluster of superdense stars, Astron. Zh. 51, 30 (1974) [Sov. Astron. 18, 17 (1974)]
Braginsky, V.B., Grishchuk, L.P:. Kinematic resonance and the memory effect in free mass gravitational antennas. Zh. Eksp. Teor. Fiz. 89, 744–750 (1985) [Sov. Phys. JETP 62, 427 (1985)]
Ehlers, J., Kundt, W.: Exact solutions of the gravitational field equations. In: Witten, L. (ed.) Gravitation, an Introduction to Current Research. Wiley, New York (1962)
Souriau, J-M.: Le milieu élastique soumis aux ondes gravitationnelles, Ondes et radiations gravitationnelles. Colloques Internationaux du CNRS No 220, p. 243. Paris (1973)
Braginsky, V.B., Thorne, K.S.: Gravitational-wave burst with memory and experimental prospects. Nature (London) 327, 123 (1987)
Bondi, H., Pirani, F.A.E.: Gravitational waves in general relativity. 13: caustic property of plane waves. Proc. R. Soc. Lond. A 421, 395 (1989)
Grishchuk, L.P., Polnarev, A.G.: Gravitational wave pulses with ‘velocity coded memory’. Sov. Phys. JETP 69, (1989) 653 [Zh. Eksp. Teor. Fiz. 96, (1989) 1153]
Zhang, P.-M., Duval, C., Gibbons, G.W., Horvathy, P.A.: The memory effect for plane gravitational waves. Phys. Lett. B 772, 743 (2017). https://doi.org/10.1016/j.physletb.2017.07.050. arXiv:1704.05997 [gr-qc]
Zhang, P.-M., Duval, C., Gibbons, G.W., Horvathy, P.A.: Soft gravitons and the memory effect for plane gravitational waves, Phys. Rev. D 96(6), 064013 (2017). https://doi.org/10.1103/PhysRevD.96.064013. arXiv:1705.01378 [gr-qc]
Lasenby, A.: Black Holes and Gravitational Waves, Talks Given at the Royal Society Workshop on ‘Black Holes’. Chichley Hall, UK and KIAA, Beijing (2017)
Zhang, P.M., Duval, C., Gibbons, G.W., Horvathy, P.A.: Velocity memory effect for polarized gravitational waves. J. Cosmol. Astropart. Phys. 2018(05), 030 (2018). https://doi.org/10.1088/1475-7516/2018/05/030. arXiv:1802.09061 [gr-qc]
Gibbons, G.W.: Quantized fields propagating in plane wave space-times. Commun. Math. Phys. 45, 191 (1975)
Lévy-Leblond, J.M.: Une nouvelle limite non-relativiste du group de Poincaré. Ann. Inst. H Poincaré 3, 1 (1965)
Gupta, V.D.S.: On an analogue of the Galileo group. Il Nuovo Cimento 54, 512 (1966)
Bondi, H., Pirani, F.A.E., Robinson, I.: Gravitational waves in general relativity. 3. Exact plane waves. Proc. R. Soc. Lond. A 251, 519 (1959). https://doi.org/10.1098/rspa.1959.0124
Kramer, D., Stephani, H., McCallum, M., Herlt, E.: Exact Solutions of Einstein’s field Equations, 2nd edn, p. 385. Cambridge University Press, Cambridge (2003). (sec 24.5 Table 24.2)
Duval, C., Gibbons, G.W., Horvathy, P.A., Zhang, P.-M.: Carroll symmetry of plane gravitational waves. Class. Quant. Grav. 34 (2017). doi.org/10.1088/1361-6382/aa7f62. arXiv:1702.08284 [gr-qc]
Ngendakumana, A., Nzotungicimpaye, J., Todjihounde, L.: Group theoretical construction of planar noncommutative phase spaces. J. Math. Phys. 55, 013508 (2014). arXiv:1308.3065 [math-ph]
Duval, C., Gibbons, G.W., Horvathy, P.A., Zhang, P.M.: Carroll versus Newton and Galilei: two dual non-Einsteinian concepts of time. Class. Quant. Grav. 31, 085016 (2014). arXiv:1402.5894 [gr-qc]
Bergshoeff, E., Gomis, J., Longhi, G.: Dynamics of Carroll Particles, Class. Quant. Grav. 31(20), 205009 (2014) https://doi.org/10.1088/0264-9381/31/20/205009. arXiv:1405.2264 [hep-th]
Brinkmann, M.W.: Einstein spaces which are mapped conformally on each other. Math. Ann. 94, 119–145 (1925)
Zhang, P.-M., Duval, C., Horvathy, P. A.: Memory effect for impulsive gravitational waves. Class. Quant. Grav. 35(6), 065011 (2018). https://doi.org/10.1088/1361-6382/aaa987. arXiv:1709.02299 [gr-qc]
Podolský, J., Sämann, C., Steinbauer, R., Svarc, R.: The global existence, uniqueness and \(C^1\)-regularity of geodesics in nonexpanding impulsive gravitational waves. Class. Quant. Grav. 32(2), 025003 (2015). https://doi.org/10.1088/0264-9381/32/2/025003. arXiv:1409.1782 [gr-qc]
Torre, C.G.: Gravitational waves: just plane symmetry. Gen. Relativ. Gravit. 38, 653 (2006). arXiv:gr-qc/9907089
Duval, C., Burdet, G., Künzle, H.P., Perrin, M.: Bargmann structures and Newton–Cartan theory. Phys. Rev. D 31, 1841 (1985)
Duval, C., Gibbons, G.W., Horvathy, P.: Celestial mechanics, conformal structures and gravitational waves. Phys. Rev. D 43, 3907 (1991). arXiv:hep-th/0512188
Ehrlich, P.E., Emch, G.G.: Gravitational waves and causality. Rev. Math. Phys. 4 (1992) 163. https://doi.org/10.1142/S0129055X92000066 (Erratum: [Rev. Math. Phys. 4, (1992) 501])
Baldwin, O.R., Jeffery, G.B.: The relativity theory of plane waves. Proc. R. Soc. Lond. A 111, 95 (1926)
Rosen, N.: Plane polarized waves in the general theory of relativity. Phys. Z. Sowjetunion 12, 366 (1937)
Landau, L.D., Lifshitz, E.M.: The Classical Theory of Fields. Volume 2 of A Course of Theoretical Physics. Pergamon Press, Oxford (1971)
Gibbons, G.W., Pope, C.N.: Kohn’s theorem, Larmor’s equivalence principle and the Newton–Hooke group. Ann. Phys. 326, 1760 (2011). https://doi.org/10.1016/j.aop.2011.03.003
Zhang, P.M., Horvathy, P.A., Andrzejewski, K., Gonera, J., Kosinski, P.: Newton–Hooke type symmetry of anisotropic oscillators. Ann. Phys. 333, 335 (2013)
Andrzejewski, K., Prencel, S.: Memory effect, conformal symmetry and gravitational plane waves. Phys. Lett. B 782, 421 (2018). https://doi.org/10.1016/j.physletb.2018.05.072
Acknowledgements
We are grateful to Christian Duval for his contribution at the early stages of this project, and to an anonymous referee for drawing our attention to [27] of which were were previously unaware. ME and PH thank the Institute of Modern Physics of the Chinese Academy of Sciences in Lanzhou for hospitality. This work was supported by the Chinese Academy of Sciences President’s International Fellowship Initiative (No. 2017PM0045), and by the National Natural Science Foundation of China (Grant No. 11575254). PH would like to acknowledge also the organizers of the “Workshop on Applied Newton–Cartan Geometry” and the Mainz Institute for Theoretical Physics (MITP), where part of this work was completed. We are grateful to our colleagues to inform us about their work in progress [33].
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, PM., Elbistan, M., Gibbons, G.W. et al. Sturm–Liouville and Carroll: at the heart of the memory effect. Gen Relativ Gravit 50, 107 (2018). https://doi.org/10.1007/s10714-018-2430-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10714-018-2430-0