
Abstract
The drilling process is one of the significant stages of rock mechanic and mining engineering. Monitoring this operation can help researchers to have accurate perspective about drilling process, physical and mechanical features of rocks and drill bit characteristics. Drilling operation generates acoustic signals as an unwanted byproduct, which could be helpful for analyzing the nature of this process. Determining the features of rock has an undeniable importance in all downstream steps of designation in mining projects. Definition of rock properties by using direct measurement tests is a time-consuming and costly process and requires high precision. Development a novel frequency based method in this research, for determining physical and rock-mechanical features of rock could be helpful for solving problems of time consumption, cost, and precision. None of the direct and indirect conventional methods is able, to provide an accessible and efficient way (in the viewpoint of cost, time consumption, and precision) for accelerating this process. This study attempts to present mathematical relations between rock mass features and dominant acoustic frequencies emitted during drilling process using Fast Fourier Transform (FFT). A novel rotary drilling machine, with the ability to record acoustic frequencies, is designed and constructed by investigators for providing this goal. All influencing parameters of drilling regime (vertical thrust force, drill bit rotational speed, diameter and material of drill bit, sound recording ability etc.) are manageable using this machine. For drilling tests and determining physical and rock mechanical characteristics, 11 volcanic rock samples are gathered in a wide range of features. After drilling tests and by analyzing acoustic signals, five dominant frequencies are extracted for each sample. Results demonstrate almost all physical–mechanical properties of volcanic rocks (uniaxial compressive strength, tensile strength, S and P-wave velocity, porosity percentage and Schmidt Rebound Number) are predictable using diverse dominant frequencies of acoustic signals. Overall, the results present novel linear models, which are able to predict rock features.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
One of most significant concerns of geoengineers is defining physical and mechanical features of rocks. This issue helps to the accurate designation of consequent stages. There are several notable points in determining physical–mechanical characteristics of rocks. One significant difficulty of this task is time-consuming of these methods. One another aspect is the cost of physical–mechanical direct tests. This part depends on sampling location and accessibility to equipped laboratories. Accuracy in determining of rock properties is another problem about this issue.
The drilling process is a basic part of geoscience, mining and civil projects. Acoustic signals, which are generated as a byproduct of the drilling operation, are able to bear characteristics of the drill bit and drilling material. If a constant drill bit is used for drilling diverse rocks with different features, generated audio signals (because of collision of the drill bit and rock mass) could be used as an attribute for recognizing material under drilling process and it’s physical–mechanical properties. Determining features of rock during drilling process can be a significant advance in geosciences. Processing the generated audio frequencies during drilling could be helpful in determining geomechanical features of rocks.
In 1941 and 1942 research about predicting rock burst using acoustic frequencies is carried out by Obert and Duvall (Obert 1941; Obert and Duvall 1942). Acoustic signals amplitude variations through diverse tensions are discussed by researchers as consequent studies in this field (Knill et al. 1968; Hardy 1972; Marceau and Moji 1973; Byerlee 1978). A satisfying mathematical relation between UCS and sonic logs is presented in 1990 by McNally for Basin Bowen (1990). In 1996, time–point and acoustic emission (AE) curves are investigated by Zang et al. (1996). Determining deep rock structures’ characteristics implementing sonic logs through drilling process is carried out by Hsu et al. (1997). McNally model is developed by applying local limitations of Germany and Greece (Ward 1998).
Acoustic related investigations in earth sciences are converted to another advanced stage from 2000. The foundation of these novel researches was implementing emitted acoustic signals for identifying rock type and its features during drilling operation. These investigations attempted to find a mathematical relation between engendered sound of drilling process and rock type and characterization. Zborovjan in 2001 developed an audio signal analysis method for determining rock type. The results showed that sound frequencies produced during rock drilling are between 5000 and 8000 Hz (Zborovjan 2001). Next research is carried out by Hatherly which presented a logic relation between UCS and geophysical logs (Hatherly 2002). In 2003, Zborovjan et al. continued their consideration about acoustic signals and concluded that emitted acoustic signals during rotary drilling can be helpful for controlling drilling operation (Zborovjan et al. 2003). Wlliams and Hagan in their research in 2006, explored differences of generated sound signals through altering cutting conditions of diverse rocks (Williams and Hagan 2006). Miklusova in 2006 designed a novel small diameter rotary drilling device in laboratory for simulating real-scale drilling process (Miklusova et al. 2006). In 2007, Kostur et al. monitored the possibility of efficient drilling operation management by analyzing sound signals. They indicated that there is a close relation between rock type and emitted sound frequencies (Kostur and Futo 2007). In a laboratory scale research Vardhan and Murthy discussed about mathematical relation of jack-hammer drilling acoustic signals and UCS and abrasivity of rocks (Vardhan and Murthy 2007; Vardhan and Bayar 2013). Determination of drill bit properties by implementing sound signals is discussed by Roy and Adhikari (2007). In 2008 Gradl et al. presented a method for extracting drill bit features by analyzing acoustic signals (Gradl et al. 2008). Vardhan et al. (2009) discussed about influence of drilling-induced sound level and diverse rock features. They concluded that there are a meaningful relation between rock properties and sound level of drilling process (Vardhan et al. 2009). In 2010 Kumar et al. explored a practical model for prognosticating geomechanical features of rocks using sound level analysis (Kumar et al. 2010). They continued their research and in 2011 presented a model for predicting properties of metamorphic rocks based on drilling-induced sound level (Kumar et al. 2011a). In another investigation in 2011 they presented an acceptable model for predicting UCS, tensile strength (TS) and porosity in sedimentary rocks (Kumar et al. 2011b). Gradl et al. by implementing a microphone and a geophone tried to discuss the relation between acoustic and seismic signals and drill bit properties (Gradl et al. 2012). Neural network models such as MLP and RBF are used for providing a sufficient mathematical relation between physical-mechanical features of different rocks and emitted sound level (Kivade et al. 2015). In 2014, Flegner et al. discussed the influence of seismic-acoustic frequencies on drilling operation management (Flegner et al. 2014).
In almost all mentioned investigations, CNC device was implemented for the drilling process. It makes these researches as expensive studies. In another hand, these devices are not accessible in all laboratories. These restrictions decrease the validity of investigations. For solving this problem, in this research, an original rotary drilling device is designed and constructed for exploring the relation of emitted acoustic frequencies during the drilling process and physical–mechanical properties of rocks. All influencing factors in drilling regime such as thrust force, rotational speed, material, and diameter of the drill bit are controllable in the novel presented machine. Additionally, this device is able to record acoustic signals directly during the drilling process. This machine is a low-cost device. This advantage makes this device accessible and applicable in anywhere and anytime.
Aforementioned researches are proved a strong mathematical relation between the sound level of the drilling operation and physical–mechanical properties of various rocks. In these investigations, the frequency analysis of drilling sound is omitted and it is necessary to develop a frequency analysis by Fast Fourier Transform (FFT) (Vardhan and Bayar 2013). This study, for the first time, tries to develop logical relations between dominant generated frequencies during the drilling process and rock features by using Fast Fourier Transform (FFT).
2 Materials and Instruments
2.1 Igneous Rock Samples
In order to define mechanical and physical properties of igneous rocks, 11 various igneous rocks are gathered in an extensive range of geomechanical features. Figure 1 shows rock samples. In the manner that stated, the main aim of present study is providing a logic relation between physical–mechanical features of rocks and dominant frequencies generated through the drilling process. In order to achieve this goal, drilling, and geomechanical tests carried out on provided rock samples. Generally, 11 diverse igneous rocks characterization is presented in Table 1.

Igneous rock samples
According to a standard which is defined by researchers (regarding the capacity of drilling machine, clamp dimensions and the diameter and depth of drill bit penetration) samples of 9 × 9 × 9 cm3 are prepared for drilling examinations.
The uniaxial compressive strength of diverse igneous rocks is measured based on natural construction rocks standards (ASTM C170). Brazilian test for determining indirect tensile strength is carried our considering ISRM and ASTM D3967. ISRM standard is utilized for determining Schmidt Rebound Number (SRN), S, and P wave velocity.
2.2 Developed Rotary Drilling Device
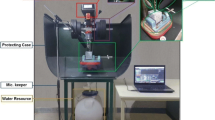
The construction base of the developed machine is a static rotary drilling device. For providing proper circumstances, all impressing factors of drilling regime should be controllable. These parameters involve recording capability, thrust force behind the drill bit, the rotational speed of drill bit, cooling fluid flow, diameter, and material of the drill bit.
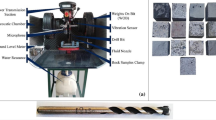
The developed machine contains various component parts for supporting a full control on different factors of rotary drilling regime. All constituent parts of the constructed device are shown in Fig. 2.

Developed rotary drilling device
Component parts of developed machine comprise nine main elements.
-
(1)
Rotary Drilling Motor this part contains a double section straps on top of the machine. The rotational speed of drilling process could be changed by altering the situation of straps on pulleys. This part is necessary for controlling the rotational speed of drilling between 210 RPM and 2580 RPM.
-
(2)
Vertical Force Controller for providing a fixed force behind drill bit, it is necessary to set a stable condition to put a constant vertical pressure on all diverse rock samples. In order to achieve this aim, two symmetrical steel arms are installed right on top of drill bit keeper. The symmetrical structure of this arm neutralizes the torque system. The outer diameter of this arm is equal to inner diameter of connecting weights and all weights could be easily assembled on this arm. Two keeper rings are designed for fixing the weights on the end of weights. The inner environment of weights is covered by polyester rings for reducing the disruptive acoustic noises.
-
(3)
Engine Keeping Pillar this component regulates the perpendicular motions of the drill bit. The symmetrical arm of thrust force is fixed on a mobile part of this section
-
(4)
Sample Keeper Clamp the dimensions of the clamp are adapted regarding samples’ dimensions and drilling depth and direction.
-
(5)
Cooling Fluid Regulator dust reduction, cooling rotary drill bit, and noise damping are tasks of this part by controlling the water flow rate.
-
(6)
Computer is responsible for recording acoustic signal by acceptable quality and resolution, data management and audio signal processing.
-
(7)
Device Case this part covers all components of the device and avoids splashing water to the outer environment.
-
(8)
Water Source this part gathers all additional water, which flew during the drilling operation, in the bottom-arranged source. Collected water releases utilizing the discharge valve.
-
(9)
Microphone this section plays the role of recording acoustic frequencies in the course of samples drilling. Microphone by way of dealing with the computer is helpful for extracting the dominant signal. Microphone AR-321 is implemented for drilling tests in this study. For accomplishing desirable and dependable results, this section needs to be chosen carefully. The utilized microphone must focus on sound recording, in exact collision point of drill bit and rock. Microphone ought to be capable to record the acoustic signals over drilling operation with the best possible quality and minimum unwanted noises.
3 Implementation Method
Standardized igneous rock samples of 9 × 9 × 9 cm3 are prepared for drilling examinations. Each sample should be stabilized on keeping clamp in the way that the drill bit could penetrate to sample from the desired point. First, preferred rotational speed should be fixed for the device. In this research, the rotational speed is fixed at 830 RPM. As mentioned in the previous section, the rotational speed of device could be altered by a double section straps. Another factor in drilling regime, which should be controlled, is a vertical force. In order to have comparable results, thrust force should be constant in all drilling tests of various samples. For providing this purpose, weights are assembled and fixed symmetrically on both sides of arms. Each side bear 200 N and overall thrust force behind drill bit is 400 during all drilling tests. 18 mm diameter diamond rotary drill bit is implemented for drilling tests. As presented, all impressing factors on drilling process (thrust force, rotational speed, and material and diameter of the drill bit) are fixed in all experiments.
There is an interval between the level of the farthermost point of the drill bit and entirely engagement level of the drill bit and rock sample. This interval is called involvement distance. The acoustic signal recording will start in all drilling tests after that the drill bit penetrates in rock more than involvement distance. In a subsequent stage, the most appropriate position should be determined for situating focal microphone. These microphones receive the main frequencies in their length direction. Therefore, the focal microphone should be located in the straight direction with involvement point of drill bit and sample. In this position, almost all unwanted surround frequencies (device vibration noises, cooling fluid falling, environment sound, etc.) will be omitted by the microphone. Additionally undesirable frequencies will not disrupt dominant frequencies. This ability of focal microphone helps to ignore unfavorable frequencies in following steps of signal processing and filtering.
Focal microphone and sound cart of the computer are dealing using a soundproof cable. The sampling rate of recording is set on 48,000 and after this step; the system is organized for the recording process. For providing cooling fluid, decreasing dust and annoying sound of drilling a water valve is fixed behind the drill bit. Fluid stream, drill bit, and rock sample will reach each other in collision point. By pushing start, key drilling process begins. Recording of audio signals instigates after penetrating the drill bit as involvement distance and stops after 20 s. Previous researches indicate that sound samples longer than 25 s do not lead to more reliable results (Zborovjan 2001; Zborovjan et al. 2003). In next step, drill bit and sample are detached and the sample is substituted with other one and all stages for the replaced sample is repeated. All extra flowed out water throughout drilling operation and drilled rock particles is accumulating in bottommost water source and comes out by discharge regulator.
After drilling tests, there are audio samples by the length of 20 s. As drilling process, carry out by 830-RPM rotational speed, and in one minute there is 1660 complete involvement between sample and drill bit surface, just one complete involvement representative sample is satisfying for signal analysis. This time is the required time for one complete rotation of drill bit and takes about 0.07 s (Fig. 3). This operation prevents disrupting dominant frequencies by rotation frequency and its harmonic frequencies.

Schematic of required time for a complete rotation of drill bit
4 Results and Discussion
In the first step, all drilling test is carried out on eight diverse igneous rock samples and sound samples recorded during 20 s. As mentioned in previous section signal samples by the length of 0.07 s are captured from each sample. In 0.07 s, the total surface of sample became engaged by the total surface of the drill bit. Captured acoustic samples are recorded by the sampling rate of 48,000 Hz and resolution of 32 bit. In order to illustrate captured signals in the frequency domain, linear spectrograms for all eight samples are plotted by the size of 4096. Hanning function is used for plotting linear spectrograms. Figure 4 indicates spectrogram algorithms for eight diverse igneous rock samples. Dotted lines in Fig. 4 show dominant frequencies in eight samples. These dominant frequencies are sorted regarding sound level (dB). In other words, these five frequencies are first five fundamental frequencies, which could be used as a representative element for predicting physical and mechanical features of rocks. It is obvious drilling regime (rotational speed, thrust force behind the drill bit, material and diameter of the drill bit, cooling water stream flow) should be constant for achieving extensible results. Table 2 presents the five dominant frequencies for different igneous samples.

Five dominant frequencies in igneous samples
As aforementioned method, all mechanical and physical features of igneous rock samples are obtained. On the other hand, after executing drilling test and recording drilling process, audio signals are analyzed and five main fundamental frequencies are determined for each sample. The main purpose of this research is developing a logical relation between dominant frequencies and physical–mechanical characteristics of igneous rocks. Linear regression method is employed for investigating satisfying and applicable mathematical relations. Equations (1) to (5) are offered for prognosticating geomechanical properties of igneous rocks. Uniaxial compressive strength (UCS), tensile strength (TS), Schmidt rebound number (SRN), S, and P wave velocity (Vs and Vp) are prognosticated in these relations.
As can be seen, all relation have acceptable accuracy and satisfying R2. Table 3 shows detailed statistical features of these relations and t test and f-test results.
Three diverse igneous rock samples are separated from eight modeling samples for validating the results of the presented model. Measured and predicted (using presented linear model) values and prognosticating errors (percentage) are shown in Table 4. For a clear illustration of the accuracy of models, distribution of predicting values rather to real measured values Figs. 5, 6, 7, 8, 9, 10 indicates the measured values by 45-degree line and predicting points by dots. As it is obvious, all models have acceptable and reliable results by under 10% errors.

Linear regression model for UCS and validation points compared to the linear model

Linear regression model for Ts and validation points compared to the linear model

Linear regression model for Vs and validation points compared to the linear model

Linear regression model for Vp and validation points compared to the linear model

Linear regression model for Porosity and validation points compared to the linear model

Linear regression model for SRN and validation points compared to the linear model
5 Conclusion
One of the main mining processes in extraction projects is drilling operation. This major operation in all stages of mining projects plays a significant role. Acoustic signals generated as a byproduct during the drilling process. Being an addition, physical and mechanical characteristics’ of rocks is the basis of almost all present and subsequent designations in the mining process. Time consumption, accuracy, cost, and accessibility all are fundamental issues about determining physical–mechanical features of rocks. One possible way for predicting physical and mechanical features of rocks is implementing drilling induced audio frequencies. This research attempt to use signal-processing tools such as Fast Fourier Transform (FFT), for prognosticating geomechanical properties of igneous rocks. For this purpose, 11 igneous rock samples are gathered in a wide range of geomechanical features. For providing the constant condition of examination for all samples, it is necessary to fix all influencing factors on the drilling operation. To achieve this aim a novel rotary drilling device is designed and constructed by researchers, which carrying out all drilling test by this machine is not time-consuming and costly. In this device, all affecting factors on drilling process are controllable (vertical thrust force, rotary speed, drill bit diameter and its material etc.). Additionally, this device is equipped with a sensitive sound recording system.
Physical, mechanical, and drilling tests are examined on all 11 igneous rock types and five dominant frequencies are determined for all samples. Results indicate there is a meaningful and reliable mathematical relation between rock features and dominant frequencies. 4th dominant frequency could be an acceptable predictor for UCS, TS, Vp, SRN, and porosity. In addition, the 2nd dominant frequency could be used for predicting Vs.
References
Byerlee J (1978) Friction of rocks. Pure Appl Geophys 116(4–5):615–626
Flegner P, Kačur J, Durdán M, Leššo I, Laciak M (2014) Measurement and processing of vibro-acoustic signal from the process of rock disintegration by rotary drilling. Measurement 56:178–193
Gradl C, Eustes AW, Thonhauser G (2008) An analysis of noise characteristics of drill bits. In: ASME 2008 27th international conference on offshore mechanics and arctic engineering, 2008. American Society of Mechanical Engineers, pp 681–687
Gradl C, Eustes AW, Thonhauser G (2012) An analysis of noise characteristics of drill bits. J Energy Res Technol 134(1):013103
Hardy HR (1972) Application of acoustic emission techniques to rock mechanics research. In: Acoustic emission. ASTM International, West Conshohocken, A.A. Balkema publishers
Hatherly P (2002) Rock strength assessment from geophysical logging. In: Proceedings of the 8th international symposium on borehole geophysics for minerals, geotechnical and groundwater applications, Toronto, Ontario, Canada
Hsu K-L, Gao X, Sorooshian S, Gupta HV (1997) Precipitation estimation from remotely sensed information using artificial neural networks. J Appl Meteorol 36(9):1176–1190
Kivade SB, Murthy CSN, Vardhan H (2015) ANN models for prediction of sound and penetration rate in percussive drilling. J Inst Eng India Ser D 96(2):93–103
Knill J, Franklin J, Malone A (1968) A study of acoustic emission from stressed rock. Int J Rock Mech Min Sci Geomech Abstr 5(1):87–88
Kostur K, Futo J (2007) Optimization of rock disintegration based on acoustic background of drilling machine. Mech AGH Univ Sci Technol 26(1):1–7
Kumar BR, Vardhan H, Govindaraj M (2010) Estimating rock properties using sound level during drilling: field investigation. Int J Min Miner Eng 2(3):169–184
Kumar BR, Vardhan H, Govindaraj M (2011a) Sound level produced during rock drilling vis-à-vis rock properties. Eng Geol 123(4):333–337
Kumar BR, Vardhan H, Govindaraj M (2011b) Prediction of uniaxial compressive strength, tensile strength and porosity of sedimentary rocks using sound level produced during rotary drilling. Rock Mech Rock Eng 44(5):613–620
Marceau J, Moji Y (1973) Application of fracture mechanics testing to process control for adhesive bonding. Document D6–41145, Boeing Commercial Airplane Company
McNally G (1990) The prediction of geotechnical rock properties from sonic and neutron logs. Explor Geophys 21(1/2):65–71
Miklusova V, Usalova L, Ivanicova L, Krepelka F (2006) Acoustic signal-new feature in monitoring of rock disintegration process. Contrib Geophys Geod 36:125–133
Obert L (1941) Use of subaudible noises for prediction of rock bursts. US Department of the Interior, Bureau of Mines, Washington
Obert L, Duvall W (1942) Use of subaudible noises for the prediction of rock bursts, part II. US Bur Mines Rep 4:365
Roy S, Adhikari G (2007) Worker noise exposures from diesel and electric surface coal mining machinery. Noise Control Eng J 55(5):434–437
Vardhan H, Bayar RK (2013) Rock engineering design: properties and applications of sound level. CRC Press, Boca Raton
Vardhan H, Murthy CS (2007) An experimental investigation of jack hammer drill noise with special emphasis on drilling in rocks of different compressive strengths. Noise Control Eng J 55(3):282–293
Vardhan H, Adhikari G, Raj MG (2009) Estimating rock properties using sound levels produced during drilling. Int J Rock Mech Min Sci 46(3):604–612
Ward B (1998) German Creek Mines Rock strength from velocity logs. Unpublished report for Capricorn Coal Management Pty Ltd
Williams E, Hagan P (2006) Monitoring acoustic emission levels with changes in rock cutting conditions. Pub, University of New South Wales, www.mining.unsw.edu.au/Publications/publications_staff/Paper_WilliamsHogan_AE_2006_web.htm. Accessed July 2006
Zang A, Wagner CF, Dresen G (1996) Acoustic emission, microstructure, and damage model of dry and wet sandstone stressed to failure. J Geophys Res Solid Earth 101(B8):17507–17521
Zborovjan M (2001) Identification of minerals during drilling process via acoustic signal. Metall Foundry 26:367–374
Zborovjan M, Lesso I, Dorcak L (2003) Acoustic identification of rocks during drilling process. J Acta Montan Slovaca 8(4):91–93
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yari, M., Bagherpour, R. Implementing Acoustic Frequency Analysis for Development the Novel Model of Determining Geomechanical Features of Igneous Rocks Using Rotary Drilling Device. Geotech Geol Eng 36, 1805–1816 (2018). https://doi.org/10.1007/s10706-017-0433-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10706-017-0433-3